第 三 章 控制系统的时间响应分析
- 格式:ppt
- 大小:8.78 MB
- 文档页数:69

控制系统时间响应分析控制系统的时间响应分析是控制系统工程中至关重要的一个环节。
控制系统时间响应分析的目的是对系统的动态性能进行分析和评价,以便设计和改进控制系统以满足系统的性能指标和要求。
时间响应分析是分析系统动态特性最常用的方法之一,由于其简单易行、直观、实用而被广泛采用。
控制系统的时间响应是指系统在输入信号发生突变时,输出信号发生的变化情况,它是衡量控制系统动态响应能力的重要参数之一。
在时间响应分析中,我们通常关注的是控制系统的过渡过程、超调量以及调节时间。
其中,过渡过程是指系统从稳态到达目标状态所需的时间,超调量是指系统在调节过程中输出信号超过目标值的最大值的百分比,调节时间是指系统达到目标状态所需要的时间。
基于这些性能指标的分析,可以确定系统的性能表现和稳定性,进而设计和优化控制系统。
时间响应分析的基本方法是利用系统的数学模型,通过激励系统并观测其输出信号随时间的变化,进而分析系统的响应特性。
此外,还可以通过脉冲响应、阶跃响应、正弦响应等不同的激励信号来分析系统的响应特性。
在针对实际系统时,时间响应分析需要考虑系统的复杂性和非线性因素等影响因素,以便获得更加准确且实用的分析结果。
对于控制系统时间响应分析而言,评价系统的性能指标是非常重要的。
标准的性能指标包括调节时间、超调量、稳态误差和振荡等。
以调节时间为例,当系统从失稳状态开始到达稳态状态的时间越短,则表示系统的响应性能越好。
超调量表示系统在达到目标状态后,输出信号超过设定值的最大值。
稳态误差则反映了系统达到稳定状态后,系统输出值与目标值之间的偏差。
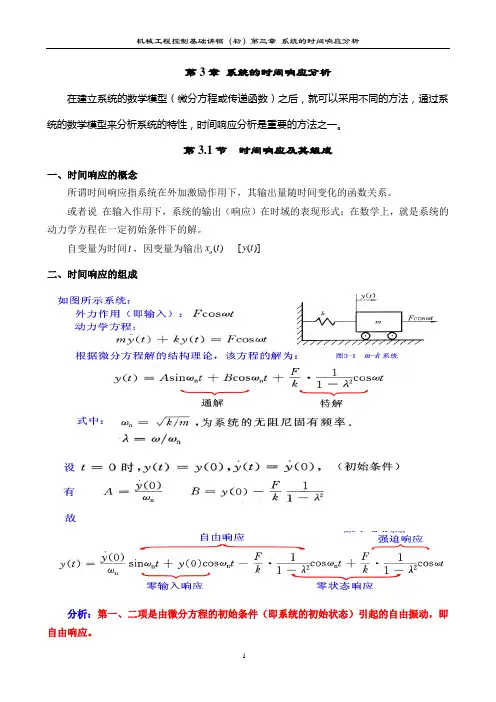
第3章 系统的时间响应分析在建立系统的数学模型(微分方程或传递函数)之后,就可以采用不同的方法,通过系统的数学模型来分析系统的特性,时间响应分析是重要的方法之一。
第3.1节 时间响应及其组成一、时间响应的概念所谓时间响应指系统在外加激励作用下,其输出量随时间变化的函数关系。
或者说 在输入作用下,系统的输出(响应)在时域的表现形式;在数学上,就是系统的动力学方程在一定初始条件下的解。
自变量为时间t ,因变量为输出()[()]o x t y t二、时间响应的组成分析:第一、二项是由微分方程的初始条件(即系统的初始状态)引起的自由振动,即自由响应。
ω。
应该说第三项的自第三项是由作用力引起的自由振动即自由响应,其振动频率均为nω与作用力频率ω无关,由响应并不完全自由。
因为它的幅值受到F的影响,当然,它的频率n自由即在此。
第四项是由作用力引起的强迫振动即强迫响应,其振动频率即为作用力频率ω。
因此系统的时间响应可从两方面分类:按振动性质可分为自由响应与强迫响应,按振动来源可分为零输入响应(即由“无输入时系统的初态”引起的自由响应)与零状态响应(即在“无输入时的系统初态”为零而仅由输入引起的响应)Array所以我们的研究对象是:零状态响应。
另外还有两个需了解的概念:瞬态响应和稳态响应。
瞬态响应:系统在外加激励作用后,从初始状态到最终状态的响应过程称为瞬态响应。
反映了系统的快、稳特性。
稳态响应:时间趋于无穷大时,系统的输出状态为稳态响应。
反映系统的准确性。
三、系统方程的特征根影响系统自由响应的收敛性和振荡第3.2节 典型的输入信号由于系统的输入具有多样性,所以在分析和设计系统时,需要规定一些典型的输入信号,然后比较各系统对典型信号的时间响应。
不同系统或参数不同的同一系统对同一典型信号的时间响应不同,反映出各种系统动态特性的差异,从而可以定出相应的性能指标,对系统的性能予以评定。
尽管在实际中,输入信号很少是典型信号,但由于系统对典型信号的时间响应和对任意信号的时间响应之间存在一定的关系统,所以知道系统对典型信号的响应就可求出对任意输入的响应。
![机械工程控制基础[3]系统的时间响应分析](https://uimg.taocdn.com/e8c193e5172ded630b1cb611.webp)
第三章系统的时间响应分析机械⼯程控制基础教案Chp.3时间响应分析基本要求(1) 了解系统时间响应的组成;初步掌握系统特征根的实部和虚部对系统⾃由响应项的影响情况,掌握系统稳定性与特征根实部之间的关系。
(2 ) 了解控制系统时间响应分析中的常⽤的典型输⼊信号及其特点。
(3) 掌握⼀阶系统的定义和基本参数,能够求解⼀阶系统的单位脉冲响应、单位阶跃响应及单位斜坡响应;掌握⼀阶系统时间响应曲线的基本形状及意义。
掌握线性系统中,存在微分关系的输⼊,其输出也存在微分关系的基本结论。
(4) 掌握⼆阶系统的定义和基本参数;掌握⼆阶系统单位脉冲响应曲线、单位阶跃响应曲线的基本形状及其振荡情况与系统阻尼⽐之间的对应关系;掌握⼆阶系统性能指标的定义及其与系统特征参数之间的关系。
(5) 了解主导极点的定义及作⽤;(6) 掌握系统误差的定义,掌握系统误差与系统偏差的关系,掌握误差及稳态误差的求法;能够分析系统的输⼊、系统的结构和参数以及⼲扰对系统偏差的影响。
(7) 了解单位脉冲响应函数与系统传递函数之间的关系。
重点与难点重点(1) 系统稳定性与特征根实部的关系。
(2) ⼀阶系统的定义和基本参数,⼀阶系统的单位脉冲响应、单位阶跃响应及单位斜坡响应曲线的基本形状及意义。
(3) ⼆阶系统的定义和基本参数;⼆阶系统单位脉冲响应曲线、单位阶跃响应曲线的基本形状及其振荡情况与系统阻尼⽐之间的对应关系;⼆阶系统性能指标的定义及其与系统特征参数之间的关系。
(4) 系统误差的定义,系统误差与系统偏差的关系,误差及稳态误差的求法;系统的输⼊、系统的结构和参数以及⼲扰对系统偏差的影响。
难点(1) ⼆阶系统单位脉冲响应曲线、单位阶跃响应曲线的基本形状及其振荡情况与系统阻尼⽐之间的对应关系;⼆阶系统性能指标的定义及其与系统特征参数之间的关系。
(2) 系统的输⼊、系统的结构和参数以及⼲扰对系统偏差的影响。
建⽴数学模型后进⼀步分析、计算和研究控制系统所具有的各种性能。
控制系统的时域响应分析
控制系统是指将环境及机器内部参数调节到所需状态的系统,它通过检测及控制参数的变化来实现控制的目的,稳定状态,使之不受外界参数的干扰。
控制系统的时域响应分析,是指控制系统对系统参数和环境影响做出的时间分布响应。
时域响应分析可以根据控制系统的结构特征和实现方式来进行,具体可以分为三类:一是闭环响应分析,在这种情况下,系统中的输出经过一定的误差修正后,又会作为输入反馈回系统,实现系统本身的稳定性。
二是开环响应分析,在这种情况下,系统的输出受到输入的影响,但没有反馈回系统,因此,系统不能自行稳定,而只能在输入变化的情况下,通过外部调节来实现。
第三是多参数响应分析,在这种情况下,控制系统不仅考虑输入和输出,还考虑参数的变化,对待调参数进行调节。
一般来说,控制系统的时域响应分析可以包括系统的调节时间、调节准确度、均衡时间等。
调节时间,指的是控制系统输出参数达到稳定态所需要的时间,它可以反映出控制系统的稳定性。
第三章 系统的时间响应3-1 什么是时间响应?答:时间响应是指系统的 响应(输出)在时域上的表现形式或系统的动力学方程在一定初始条件下的解。
3.2 时间响应由哪两部分组成?各部分的定义是什么?答:按分类的原则不同,时间响应有初始状态为零时,由系统的输入引起的响应;零输入响应,即系统的 输入为零时,由初始状态引起的响应。
按响应的性质分为强迫响应和自由响应。
对于稳定的系统,其时间响应又可分为瞬态响应和稳态响应。
3.3时间响应的瞬态响应反映哪方面的性能?而稳态响应反映哪方面的性能? 答:瞬态响应反映了系统的稳定性和响应的快速性两方面的性能;稳态响应反映了系统响应的准确性。
3.4 设系统的单位脉冲响应函数如下,试求这些系统的传递函数. 1.25(1)()0.0125;t w t e -= (2)()510s i n (44w t t t =++););t-3(3)w(t)=0.1(1-e(4)()0.01w t t= 解:(1)11()()()()()00w t x t L X s L G s X s i --⎡⎤⎡⎤===⎣⎦⎣⎦ ()1X s i=(),()()G s G s L w t =⎡⎤⎡⎤⎣⎦⎣⎦-1w(t)=L 所以,0.01251.251)()()0.0125 1.25t G s L w t L e s -⎡⎤===⎡⎤⎣⎦⎢⎥+⎣⎦((2)()()G s L w t =⎡⎤⎣⎦5510sin(4)sin 4cos422L t t t s s=++=++⎡⎤⎡⎤⎣⎦⎣⎦5452()2222161616s s s s s s =++=++++113(3)()()0.1(1)0.11t G s L w t L e s s s ⎧⎫⎡⎤-⎪⎪⎢⎥==-=-⎡⎤⎨⎬⎣⎦⎢⎥+⎪⎪⎣⎦⎩⎭0.1(31)s s =+ 0.01(4)()()0.012G s L w t L t s ===⎡⎤⎡⎤⎣⎦⎣⎦3.5解11()()110.256min.t TG s xt e ou Ts T -==-+=()因为一阶系统的单位阶跃响应函数为解得,1(2)(),()10121111()()2211G s r t At t Ts A T T t x t L AL A t T Te or Ts s Ts T s s ===+⎡⎤⎡⎤---⎢⎥==-+=-+⎢⎥++⎢⎥⎣⎦⎣⎦因为一阶系统在输入作用下的时间响应()0.256()()()(1) 2.56(1)tt tT t T Te T e t r t x t At AAT e e or----+=-=-=-=-当t=1min e(t) = 2.53度3.6解解:(1)该系统的微分方程可以表示为o i u iR u += ω⎰=i d t C u o 1其传递函数为 111111)()()(+=+=+==Ts RCs CsR Cs s u s u s G i o 其中T=RC 。