北航卡尔曼滤波课程-捷联惯导静基座初始对准实验
- 格式:docx
- 大小:270.03 KB
- 文档页数:8
卡尔曼滤波实验报告
捷联惯导静基座初始对准实验
一、实验目的
① 掌握捷联惯导的构成和基本工作原理; ② 掌握捷联惯导静基座对准的基本工作原理;
③ 了解捷联惯导静基座对准时的每个系统状态的可观测性; ④ 了解双位置对准时系统状态的可观测性的变化。
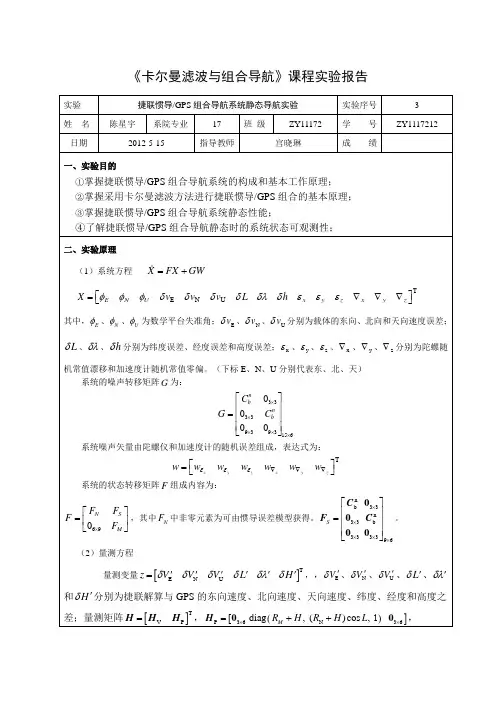
二、实验原理
选取状态变量为:[]T E
N E N U x y x y z X V V δδεεε=ψψψ∇∇,其
中导航坐标系选为东北天坐标系,E V δ为东向速度误差,N V δ为北向速度误差, E ψ为东
向姿态误差角 ,N ψ为北向姿态误差角, U ψ为天向姿态误差角, x ∇为东向加速度偏置,y ∇为北向加速度偏置,x ε为东向陀螺漂移,y ε为北向陀螺漂移,z ε为天向陀螺漂移。
则
系统的状态模型为:
X AX W =+
(1)
其中,
1112212211
12
1321222331323302sin 000
002sin 000000000sin cos 0000sin 000000cos 0000000000000000000000000000000000000000000000000000
0L g C C L g C C L L C C C L C C C L C C C A Ω-⎡
⎤⎢⎥-Ω⎢⎥⎢⎥Ω-Ω⎢
⎥-Ω⎢⎥⎢⎥Ω=⎢
⎥⎢⎥⎢⎥⎢
⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣
⎦
[00000]E N E N U
T V V W W W W W W δδψψψ=,E
D V
W W δψ为零均值高斯
白噪声,分别为加速度计误差和陀螺漂移的噪声成分,Ω为地球自转角速度,ij C 为姿态矩阵n
b C 中的元素,L 为当地纬度。
量测量选取两个水平速度误差:[ ]T
E N Z V V δδ=,则量测方程为:
10000000000100000000E E N N V X V δηδη⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦
(2)
即Z HX η=+
其中,H 为量测矩阵,[]T
E
N ηηη=为量测方程的随机噪声状态矢量,为零均值高
斯白噪声。
要利用基本卡尔曼滤波方程进行状态估计,需要将状态方程和量测方程进行离散化。
系统转移矩阵为:
2323
/1111102!3!!
n n
k k k k k k n T T T I TA A A A n ∞
-----=Φ=++++
=∑ (3)
其中,T 为采样间隔。
量测矩阵为:
10000000000100000000k H ⎡⎤
=⎢⎥
⎣⎦
(4)
所以经过离散化,系统的数学模型为:
,1111
k k k k k k k k k k X X W Z H X V ----=Φ+Γ⎧⎨
=+⎩
(5)
其中,系统噪声驱动阵1k I -Γ=。
有了状态方程和量测方程,可以采用以下滤波方程进行卡尔曼滤波:
/11,1/1,11,11111
/1/1/1/1/1()
()()()k k k k k T T k k k k k k k k k k T T k k k k k k k k k k k k k k k k k T T k k k k k k k k k k
X X P P Q K P H H P H R X X K Z H X P I K H P I K H K R K φφφΛ
Λ
-------------ΛΛΛ
---⎧=⎪⎪=+ΓΓ⎪⎪⎪=+⎨⎪⎪=+-⎪
⎪=--+⎪⎩
(6)
滤波方程中所用的量测值k Z ——速度误差,可由捷联惯导采用角增量法解算。
三、静基座初始对准流程
陀螺加计测量数据
解析粗对准
开始
捷联惯导解算
卡尔曼滤波
对准完毕
结束
N
Y
修正
图1 静基座初始对准流程图
四、实验结果及分析
4.1 仿真数据单位置初始对准 仿真条件:
陀螺常值漂移:0.02°/h ; 陀螺随机漂移:0.01°//h ; 加速度计常值偏置:100ug ; 加速度计随机误差:50ug ; 初始失准角ΨN ,ΨE ,ΨD: 1° 惯导所处位置的地理纬度: L = 45° 仿真结果:
时间/s
速度误差/m /s
时间/s
速度误差/m /s
-3
时间/s
速度误差/m /s
时间/s
速度误差/m /
s
东向水平失准角
时间/s
误差角/d e g
东向水平失准角均方差
时间/s
误差角/d e
g
北向水平失准角
时间/s
误差角/d e g
北向水平失准角均方差
时间/s
误差角/d e
g
时间/s
误差角/d e g
时间/s
误差角/d e g
时间/s
偏置/μg
-4
时间/s
偏置/μg
时间/s
偏置/μg
-4
时间/s
偏置/μg
图2 仿真数据单位置初始对准结果
4.2 真实数据双位置初始对准 仿真条件:
采样频率:100Hz
陀螺常值漂移: 0.01度/每小时 陀螺随机漂移:0.01度/每小时 加速度计常值偏置:50ug 加计随机误差:50ug
初始位置:纬度:39.97912 经度:116.34681 高度:100.38米 对准结果:
-4
时间/s
漂移/d e g /h
时间/s
漂移/d e g /h
-3
时间/s
漂移/d e g /
h
时间/s
漂移/d e g /h
-4
天向陀螺漂移
时间/s
漂移/d e g /
h
时间/s
漂移/d e g /
h
时间/s
速度误差/m /
s
时间/s
速度误差/m /
s
时间/s
速度误差/m /
s
时间/s
速度误差/m /s
时间/s
误差角/d e g
-3
时间/s
误差角/d e g
时间/s
误差角/d e g
-3
时间/s
误差角/d e g
时间/s
误差角/d e g
-4
时间/s
误差角/d e g
东向加速度计偏置
时间/s
偏置/μ
g
-3
东向加速度计偏置均方差
时间/s
偏置/μg
北向加速度计偏置
时间/s
偏置/μ
g
-3
北向加速度计偏置均方差
时间/s
偏置/μ
g
时间/s
漂移/d e g /
h
时间/s
漂移/d e g /h
时间/s
漂移/d e g /
h
时间/s
漂移/d e g /h
图3 真实数据双位置初始对准结果
时间/s
漂移/d e g /h
时间/s
漂移/d e g /h。