04 第四章 激光准直及多自由度测量
- 格式:ppt
- 大小:1.34 MB
- 文档页数:9

激光测量技术
作者:孙长库
出版年: 2001年
本书系统地介绍了激光测量的基本原理、方法及应用,主要内容包括:激光的基本原理与技术、激光干涉测量技术、激光衍射测量技术、激光准直及多自由度测量技术、激光三维视觉测量技术等。
第一章激光原理及技术
第一节辐射理论概要
第二节激光产生的原理及条件
第三节激光的基本物理性质
第四节高斯光束
第五节稳频技术
第六节激光调制技术
第七节半导体激光器
第二章激光干涉测量技术
第一节激光干涉测量长度和位移
第二节激光小角度干涉仪
第三节激光外差干涉测量技术
第四节激光全息干涉测量技术
第五节激光散斑干涉测量技术
第六节激光光纤干涉测量技术
第七节激光多波长干涉测长技术
第三章激光衍射测量技术
第一节激光衍射测量原理
第二节激光衍射测量方法
第三节激光衍射测量的应用
第四章激光准直及多自由度测量
第一节激光准直测量原理
第二节激光准直仪的组成
第三节大气扰动及激光束漂移
第四节激光准直测量的应用
第五节激光多自由度测量技术
第五章激光视觉三维测量技术
第一节激光三角法测量原理
第二节激光视觉测量的基本原理
第三节激光视觉三维测量技术的应用第六章激光的其他测量技术
第一节激光多普勒(Doppler)测速技术第二节激光扫描测径技术
第三节激光测距技术。
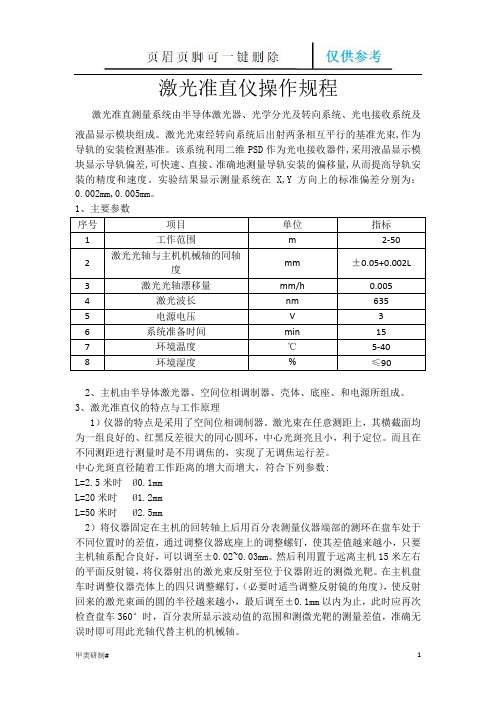
激光准直仪操作规程激光准直测量系统由半导体激光器、光学分光及转向系统、光电接收系统及液晶显示模块组成。
激光光束经转向系统后出射两条相互平行的基准光束,作为导轨的安装检测基准。
该系统利用二维PSD作为光电接收器件,采用液晶显示模块显示导轨偏差,可快速、直接、准确地测量导轨安装的偏移量,从而提高导轨安装的精度和速度。
实验结果显示测量系统在X,Y方向上的标准偏差分别为:0.002mm,0.005mm。
1、主要参数序号项目单位指标1 工作范围m 2-502 激光光轴与主机机械轴的同轴度mm ±0.05+0.002L3 激光光轴漂移量mm/h 0.0054 激光波长nm 6355 电源电压V 36 系统准备时间min 157 环境温度℃5-408 环境湿度% ≤902、主机由半导体激光器、空间位相调制器、壳体、底座、和电源所组成。
3、激光准直仪的特点与工作原理1)仪器的特点是采用了空间位相调制器。
激光束在任意测距上,其横截面均为一组良好的、红黑反差很大的同心圆环,中心光斑亮且小,利于定位。
而且在不同测距进行测量时是不用调焦的,实现了无调焦运行差。
中心光斑直径随着工作距离的增大而增大,符合下列参数:L=2.5米时Ø0.1mmL=20米时Ø1.2mmL=50米时Ø2.5mm2)将仪器固定在主机的回转轴上后用百分表测量仪器端部的测环在盘车处于不同位置时的差值,通过调整仪器底座上的调整螺钉,使其差值越来越小,只要主机轴系配合良好,可以调至±0.02~0.03mm。
然后利用置于远离主机15米左右的平面反射镜,将仪器射出的激光束反射至位于仪器附近的测微光靶。
在主机盘车时调整仪器壳体上的四只调整螺钉,(必要时适当调整反射镜的角度),使反射回来的激光束画的圆的半径越来越小,最后调至±0.1mm以内为止,此时应再次检查盘车360°时,百分表所显示波动值的范围和测微光靶的测量差值,准确无误时即可用此光轴代替主机的机械轴。

激光准直操作规程激光准直操作规程一、工作前准备1. 工作人员应熟悉激光准直操作规程,并掌握相关的安全知识。
2. 检查激光器设备是否正常工作,确保电源、电线等连接稳固。
3. 检查激光辐射区域是否非常密封,并确保没有其他人员在该区域内工作。
4. 确保配备好个人保护装备,包括激光防护眼镜、手套等。
二、操作步骤1. 打开激光器电源开关,启动激光器。
2. 检查激光器的输出功率是否合适,确保输出功率不超过安全范围。
3. 将准直仪置于工作平台上,并确保其与激光器的光路对正。
4. 设定激光器输出的准直光线强度。
5. 调整激光准直系统,使得准直仪能够准确指向目标。
6. 将光线通过准直仪传输到目标,在目标位置进行测量或其它操作。
7. 操作完成后,关闭激光器电源开关,停止激光器工作。
8. 将激光器、准直仪等设备进行清理和检查,并确保各部件无损坏。
三、注意事项1. 激光准直过程中,严禁向准直光线中直接观察,以免对视觉造成伤害。
2. 激光准直需要注意对激光辐射区域进行有效的隔离,确保无关人员不进入。
3. 在激光准直过程中,工作人员应时刻保持专注,避免操作失误。
4. 激光辐射是一种高能量辐射,严禁在不具备激光防护知识和装备的情况下进行操作。
5. 若需要调整激光器的输出功率,请按照标准程序进行调整,切勿随意更改。
6. 在工作结束后,应及时将激光器等设备关闭,避免浪费能源和产生其他安全隐患。
7. 在操作过程中,如发现激光器设备异常、故障等情况,应立即停止操作并进行必要的维修或更换。
8. 在进行激光准直操作时,应视具体情况采取相应的安全措施,确保操作人员和周围人员的安全。
四、意外处理1. 若发生人员被激光直射眼睛的意外情况,应立即转移到安全地方。
2. 立即用大量清水冲洗受伤眼部,冲洗时间不少于15分钟。
3. 紧急联系医疗救护人员,确保伤者得到及时专业的医疗救助。
4. 若发生设备故障、火灾等其他意外情况,应立即停止操作,采取相应的安全措施,并报告相关部门。

激光测量技术第一章 激光原理与技术1、简并度:同一能级对应的不同的电子运动状态的数目;简并能级:电子可以有两个或两个以上的不同运动状态具有相同的能级,这样的能级叫 简并能级2、泵浦方式:光泵浦,电泵浦,化学泵浦,热泵浦3、激光产生三要素:泵浦,增益介质,谐振腔阀值条件:光在谐振腔来回往返一次所获得光增益必须大于或者等于所遭受的各种 损耗之和.4、He-Ne 激光器的三种结构:【主要结构:激光管(放电管,电极,光学谐振腔)+电源+光学元件】 1)内腔式;2)外腔式;3)半内腔式5、激光器分类:1)工作波段:远红外、红外激光器;可见光激光器;紫外、真空紫外激光器;X 光激光器2)运转方式:连续激光器;脉冲激光器;超短脉冲激光器6、激光的基本物理性质:1)激光的方向性。
不同类型激光器的方向性差别很大,与增益介质的方向性及均匀性、谐振腔的类型及腔长和激光器的工作状态有关。
气体激光器的增益介质有良好的均匀性,且腔长大,方向性 ,最好!例1:对于直径3mm 腔镜的632.8nmHe-Ne 激光器输出光束,近衍射极限光束发散角为2)激光的高亮度。
3)单色性。
激光的频率受以下条件影响:能级分裂;腔长变化←泵浦、温度、振动4)相干性:时间相干性(同地异时):同一光源的光经过不同的路径到达同一位置,尚能发生干涉,其经过的时间差τc 称为相干时间。
相干长度: 例 : He-Ne laser 的线宽和波长比值为10-7求Michelson 干涉仪的最大测量长度是多少? 解: ,最大测量长度为Lmax=Lc/2=3.164m 。
空间相干性(同时异地):同一时间,由空间不同的点发出的光波的相干性。
7、相邻两个纵模频率的间隔为谐振腔的作用:(1)提供正反馈;(2)选择激光的方向性;(3)提高激光的单色性。
例 设He-Ne 激光器腔长L 分别为0.30m 、1.0m,气体折射率n~1,试求纵模频率间隔各为多少?8、激光的横模:光场在横向不同的稳定分布,激光模式一般用TEMmnq 表示原因:激活介质的不均匀性,或谐振腔内插入元件(如布儒斯特窗)破坏了腔的旋转对称性。

基于激光准直原理的多自由度测量系统的研究的开题报告一、选题背景激光准直原理是近年来广泛应用于工业领域的一种测量方法。
这种方法可以在工业生产中精确地测量物体的尺寸和位置,从而实现高质量生产和制造。
多自由度测量系统是指可以同时测量物体的多个方向上的参数,可以满足不同的测量需求。
在很多领域,如机械制造、建筑工程、航空航天等,都需要进行多自由度测量,因此多自由度测量系统的研究具有重要的意义。
二、研究意义当前,工业生产中对精度和效率的要求越来越高,而多自由度测量系统可以提高测量效率并获得更精确的数据。
因此,研究基于激光准直原理的多自由度测量系统,可以满足工业生产对于精度和效率的要求,也可以为相关领域的研究提供技术和方法支持。
三、研究内容本研究旨在设计和实现基于激光准直原理的多自由度测量系统,并研究其在工业测量中的应用。
具体研究内容包括:1. 多自由度测量系统的设计和制作,包括硬件和软件设计;2. 激光准直原理在多自由度测量中的应用研究;3. 多自由度测量系统在不同领域的实际应用研究。
四、研究方法本研究将采用以下方法:1. 系统学习激光准直原理相关知识;2. 设计和制作多自由度测量系统的硬件和软件;3. 进行实验和数据分析,探究多自由度测量系统的测量精度和稳定性;4. 探究多自由度测量系统在不同领域的应用,并进行相关数据分析。
五、预期成果本研究预期达成以下成果:1. 完成基于激光准直原理的多自由度测量系统的设计和制作;2. 验证多自由度测量系统的测量精度和稳定性;3. 探究多自由度测量系统在不同领域的应用,并得到相关数据和实际效果。
六、研究进度安排本研究的进度安排如下:1. 第一阶段:激光准直原理学习和多自由度测量系统设计(两个月);2. 第二阶段:多自由度测量系统制作和实验验证(三个月);3. 第三阶段:多自由度测量系统的应用研究和数据分析(两个月);4. 第四阶段:论文撰写和答辩准备(一个月)。
七、预期贡献本研究的预期贡献包括:1. 提出基于激光准直原理的多自由度测量系统的设计和制作方法;2. 探究多自由度测量系统在工业生产中的应用前景;3. 为相关领域的测量研究提供技术和方法支撑。
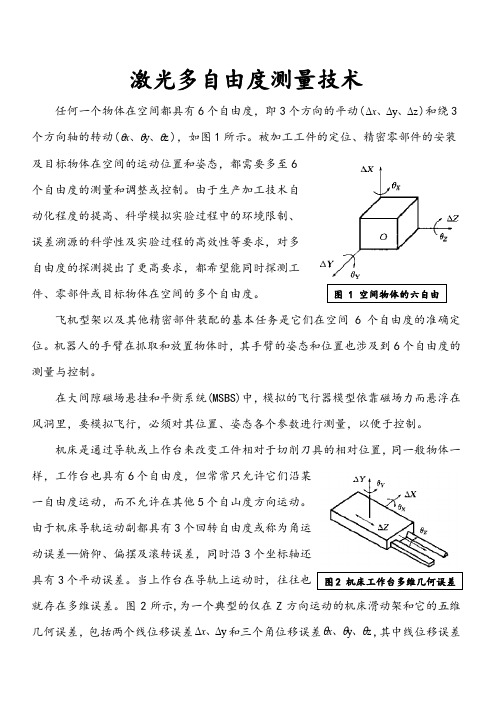
激光多自由度测量技术任何一个物体在空间都具有6个自由度,即3个方向的平动(z y ∆∆∆、、x )和绕3个方向轴的转动(z y θθθ、、x ),如图1所示。
被加工工件的定位、精密零部件的安装及目标物体在空间的运动位置和姿态,都需要多至6个自由度的测量和调整或控制。
由于生产加工技术自动化程度的提高、科学模拟实验过程中的环境限制、误差溯源的科学性及实验过程的高效性等要求,对多自由度的探测提出了更高要求,都希望能同时探测工件、零部件或目标物体在空间的多个自由度。
飞机型架以及其他精密部件装配的基本任务是它们在空间6个自由度的准确定位。
机器人的手臂在抓取和放置物体时,其手臂的姿态和位置也涉及到6个自由度的测量与控制。
在大间隙磁场悬挂和平衡系统(MSBS)中,模拟的飞行器模型依靠磁场力而悬浮在风洞里,要模拟飞行,必须对其位置、姿态各个参数进行测量,以便于控制。
机床是通过导轨或上作台来改变工件相对于切削刀具的相对位置,同一般物体一样,工作台也具有6个自由度,但常常只允许它们沿某一自由度运动,而不允许在其他5个自山度方向运动。
由于机床导轨运动副都具有3个回转自由度或称为角运动误差—俯仰、偏摆及滚转误差,同时沿3个坐标轴还具有3个平动误差。
当上作台在导轨上运动时,往往也就存在多维误差。
图2所示,为一个典型的仅在Z 方向运动的机床滑动架和它的五图1 空间物体的六自由图2 机床工作台多维几何误差维几何误差,包括两个线位移误差y ∆∆、x 和三个角位移误差z y θθθ、、x ,其中线位移误差与机床几何误差成线性关系,对机床加工性能的影响是很明显的。
一、两自由度测量激光准直仪可以同时测定两个自由度的位置偏差,它可分为平面型和反射型两种结构,其敏感元件常采用光电池和光敏电阻。
平面型光电池传感器结构原理如图3-a 所示,在激光束照射下,四块光电池1、2、3、4分别产生电压 V 1、V 2、V 3和V 4,当靶标中心偏离基准激光束中心△Y 时,V 1和V 3的差与△Y 成比例,即V 1 -V 3 =K △Y,其中K 是敏感系数。
激光经纬仪准直法工作原理、观测方法激光是一种新型光源,它具有方向性强、单色性好、亮度高、相干性好的优点。
激光技术在大坝水平位移观测中的应用,大大提高了观测效率和精度,为变形观测的自动化开辟了新途径。
目前在大坝水平位移观测中采用较多的是激光经纬仪准直法。
激光经纬仪
是在普通经纬仪上安装一个激光管,如在JZ型经纬仪望远镜上安装一个氦(He)氖(Ne)激光管便成为J Z—J D激光经纬仪型激光经纬仪。
观测水平位移时由激光经纬仪发射一条可见的红色激光束照准目标,其原理与活动觇标视准线法完全相同。
激光照准的有效射程白天为500mm左右,夜间为2.6km以上。
当照准距离为300mm时,精度可达1×10-5m。
第一章光学测量的基本知识。
光学测量系统的主要组成部分:常用光源、探测器与处理电路、调制方法等任一测量系统组成部分:(被测对象)传感器信号调理数据显示与记录(观察者)光学测量系统的基本组成部分:光源、被测对象与被测量、光信号的形成与获得、光信号的转换、信号或信息处理光学测量的主要应用范围:①辐射度量和光度量的测量②非光物理量的测量③光电子器件与材料及光电子系统特性的测试光学测量方法的优点:非接触性、高灵敏度、高精度光学测量技术主要特点:非接触性、高灵敏度、三维性、快速性与实时性技术现状(近代光学测量系统的主要特点):①从主观光学发展为客观光学,用光电探测器取代,提高测量精度和与效率。
②用激光光源来取代常规光源,获得方向性极好的实际光束。
③从光机结合的模式向光机电一体化的模式转换,实现测量与控制的一体化。
发展方向:1.亚微米级、纳米级的高精密光学测量方法将优先得到发展,利用新的物理学原理和光电子学原理产生的光学测量方法将不断出现2.以微细加工技术为基础的集成光学及其它微传感器将成为技术的主流方向3.3D测量技术取得突破,发展带存储功能的全场动态测量仪器4.发展闭环式光学测量技术,实现光学测量与控制的一体化5.发展光学诊断和光学无损检测,取代常规的无损检测方法光学测量方法分类:相位检测、时间探测、谱探测、衍射法、图像探测、各种物理效应方法选择依据:被测对象与被测量、测量范围、测量的灵敏度或精度、经济性、环境要求光源选择的基本要求:①对光源发光光谱特性的要求②对光源发光强度的要求③对光源稳定性的要求光源的分类:按光辐射来源不同,分为自然光源和人工光源。
按工作原理不同,人工光源大致分为热光源,气体放电光源,固体光源和激光光源。
通常把能发出可见光的物体叫做光源,把能发出不可见光的物体叫做辐射源。
激光器:利用受激发射原理和激光腔的滤波效应。
主要特点:①有极小的光束发散角,方向性好和准直性好②激光的单色性好,或者说相干性好③功率密度很高分类:按工作物质的不同分为气体激光器、固体激光器、半导体激光器半导体激光器优点:体积小、重量轻、寿命长、具有高的转换效率光电探测器:把光辐射量转换为电量的光探测器。
一、实验目的1. 熟悉激光准直仪的结构和原理;2. 掌握激光准直仪的使用方法和操作步骤;3. 学会使用激光准直仪进行实际测量,并对测量结果进行分析。
二、实验原理激光准直测量是一种基于激光束传播特性的测量方法。
激光束具有单色性好、相干性好、方向性好等特点,使其在测量领域具有广泛的应用。
激光准直仪利用激光束的这些特性,通过测量激光束的传播路径和方向,实现对目标物体位置、距离、角度等参数的测量。
实验原理主要包括以下几部分:1. 激光发射:激光准直仪通过激光发射器产生激光束,激光束经过一系列光学元件后,形成具有高方向性的光束。
2. 激光传播:激光束在空气中传播,遇到目标物体后,部分激光束被反射回来。
3. 激光接收:激光接收器接收反射回来的激光束,并将接收到的光信号转换为电信号。
4. 数据处理:数据处理系统对接收到的电信号进行处理,计算出目标物体的位置、距离、角度等参数。
三、实验仪器与设备1. 激光准直仪一台;2. 激光发射器一个;3. 激光接收器一个;4. 光学元件一套;5. 计算机一台;6. 数据采集卡一个。
四、实验步骤1. 安装激光准直仪:将激光准直仪放置在实验平台上,调整仪器的水平度和垂直度,确保仪器稳定。
2. 连接仪器:将激光发射器、激光接收器、光学元件等连接到激光准直仪上。
3. 设置参数:在计算机上设置激光准直仪的测量参数,如激光波长、测量距离、测量角度等。
4. 测量:打开激光准直仪,调整激光发射器和激光接收器的位置,使激光束对准目标物体。
5. 数据采集:通过数据采集卡,将激光接收器接收到的电信号传输到计算机,进行数据处理。
6. 分析结果:对测量结果进行分析,判断测量数据的准确性。
五、实验结果与分析1. 实验数据:(1)激光波长:λ = 632.8nm;(2)测量距离:d = 100m;(3)测量角度:θ = 30°;(4)测量误差:±0.1mm。
2. 结果分析:通过实验,我们发现激光准直测量方法具有以下优点:(1)测量精度高:激光准直测量具有较高的测量精度,适用于对测量精度要求较高的场合;(2)测量速度快:激光准直测量速度快,适用于大规模测量;(3)操作简便:激光准直仪操作简便,易于上手。