谐波齿轮减速器 HDUF (FB)机器人工程师必备
- 格式:pdf
- 大小:677.86 KB
- 文档页数:8
谐波传动减速器原理
谐波传动减速器是一种基于谐波振动原理工作的精密减速装置。
它主要由柔性齿条、柔性齿轮、星轮、轴套和外壳等组成。
在谐波传动减速器中,谐波振动由外部驱动器引起。
驱动器通过柔性齿轮施加周期性外力,使之产生弯曲变形。
柔性齿条与柔性齿轮的齿数不同,由于弹性形变的特性,齿条和齿轮之间会发生相对位移。
当外力周期性施加于柔性齿轮上时,柔性齿条的齿数和位置会发生变化。
这种变化会导致星轮的旋转,同时将输出转矩传递给输出轴。
输出轴通过轴套连接到外壳上,从而实现减速效果。
谐波传动减速器的减速比取决于外驱动传动器与输出轴之间的齿数比。
通常情况下,谐波传动减速器可以实现较高的减速比,同时还具有大的扭矩输出。
此外,谐波传动减速器具有结构紧凑、响应快速和传动效率高等优点,广泛应用于机械领域。
总结起来,谐波传动减速器利用谐波振动原理实现减速效果,通过驱动器的作用使得柔性齿条和齿轮产生相对位移,从而实现输出轴的旋转和扭矩输出。
谐波减速器概述阳泉华鑫采矿设备有限公司2010.12.4目录1. 简述 (1)1.1 谐波传动技术背景 (1)2. 国内外研究现状 (1)3.波减速器介绍 (2)3.1谐波传动术语介绍 (2)3.3 谐波减速器介绍 (2)3.3.1 谐波减速器代号 (2)3.3.2 谐波减速器的品种规格 (2)3.3.3 谐波齿轮减速器的基本构造 (3)3.3.4 谐波减速器的原理 (3)3.3.5 谐波减速器主要零件常用材料: (5)3.3.6 生产谐波减速器所需设备情况 (5)4. 谐波减速器的特点 (7)4.1 谐波减速器的主要优点 (7)4.2 谐波减速器的主要缺点 (8)4.3 谐波传动与其它传动性能的具体比较 (8)5 国内外谐波减速器比较 (9)6. 发展趋势和待解决的问题 (10)附录谐波减速器生产厂家1. 简述1.1 谐波传动技术背景谐波传动是上世纪五十年代后期随着航天技术的发展而出现的一种重要的新型机械传动方式,被认为是机械传动的重大突破。
谐波机械传动原理是苏联工程师A.摩察尤唯金首先于1947年提出,1955年第一台用于火箭的谐波齿轮传动是由美国人C.M .Musser发明的。
此后,在航天飞行器和航天设备上的多次使用,充分显示了这种传动的优越性。
1959年取得了此项发明的专利后,于1960年正式公开发表了该项技术的详细资料,一九六一年开始介绍到我国。
由于谐波传动具有许多优点,因而获得了广泛的推广。
到上世纪七、八十年代,许多不同类型的谐波传动取得了专利。
2. 国内外研究现状谐波传动自50年代中期出现后成功地用于火箭、卫星等多种传动系统中,使用证实这种传动较一般齿轮传动具有运动精度高、回差小、传动比大、重量轻、体积小、承载能力大,并能在密封空间和辐射介质的工况下正常工作等优点。
因此美、日、俄等技术先进国家,对这方面的研制工作一直都很重视。
如美国就有国家航空管理局路易斯研究中心、空间技术实验室、贝尔航空空间公司、麻省理工学院、通用电气公司等几十个大型公司和研究中心都从事过这方面的研究工作。
谐波减速器节圆直径摘要:一、谐波减速器简介二、谐波减速器的主要构成部分三、谐波减速器的变速原理四、谐波减速器的应用领域五、谐波减速器节圆直径的含义与重要性正文:一、谐波减速器简介谐波减速器,又称谐波齿轮传动装置,起源于1955年由美国发明家C.W.Musser发明。
在我国,谐波减速器在1970年得到了东京的HarmonicDrive(哈默纳克)公司的进一步发展,该公司目前已成为全球最大的谐波减速器技术和生产商。
谐波减速器既可用于减速,也可用于加速,尤其在我国的工业机器人领域应用广泛。
二、谐波减速器的主要构成部分谐波减速器主要由三部分构成:刚轮、柔轮和谐波发生器。
刚轮是一个刚性的内齿圈,柔轮则类似于一个轮毂特别窄的齿轮,齿数比刚轮少(一般是2或者4个齿),具有较大的柔度。
谐波发生器则类似于一个焦距适当小的椭圆凸轮,嵌在滚珠轴承里。
三、谐波减速器的变速原理谐波减速器的变速原理源于其特殊的结构。
想象一下初学者玩呼啦圈的场景,当呼啦圈转得很快,转的人会磕磕绊绊地缓慢反转以至于摔倒。
在谐波减速器中,刚轮、柔轮和谐波发生器三者都可以作为输入或输出。
由于柔轮齿数比刚轮少,且柔轮与刚轮的啮合关系,会产生差速。
根据不同的部件作为输入和输出,减速比会有极大的差距。
四、谐波减速器的应用领域谐波减速器因其高传动比、高精度、高刚性等特点,在工业机器人、航空航天、精密仪器等领域有着广泛的应用。
五、谐波减速器节圆直径的含义与重要性节圆直径是谐波减速器的一个重要参数,它影响了谐波减速器的传动比、承载能力和刚度等性能。
节圆直径越大,传动比越小,承载能力越大,但刚度也会相应降低。
因此,在选择谐波减速器时,根据实际应用需求选择合适的节圆直径至关重要。
总的来说,谐波减速器以其独特的结构和优良的性能,在各种领域都有着广泛的应用。
谐波减速器的结构组成介绍谐波减速器是一种基于谐波原理工作的减速装置,广泛应用于机械传动领域。
它以其结构紧凑、传动效率高、精度高等特点受到了广大工程师的青睐。
本文将详细介绍谐波减速器的结构组成,包括主要部件和工作原理。
主要部件谐波减速器主要由以下几个部件组成:波发生器波发生器是谐波减速器的核心部件,它通过变形将电机的旋转运动转变为谐波运动。
波发生器通常由柔性轮和波发生器壳体组成。
柔性轮是由多个柔性齿片组成的,当电机旋转时,柔性轮会产生弹性变形,从而产生谐波运动。
谐波轮谐波轮是与波发生器配合工作的部件,它由内外两个齿圈和齿轮组成。
内齿圈与波发生器的柔性齿片相互咬合,外齿圈与输出轴上的齿轮相互咬合。
当波发生器产生谐波运动时,内齿圈会带动外齿圈和齿轮一起旋转,从而实现减速效果。
输出轴输出轴是谐波减速器的输出端,它通过与谐波轮上的齿轮咬合,将减速后的动力传递给外部设备。
输出轴通常由轴承支撑,以减少摩擦和磨损。
输入轴输入轴是谐波减速器的输入端,它与电机的轴连接,将电机的旋转运动传递给波发生器。
输入轴通常由轴承支撑,以减少摩擦和磨损。
壳体壳体是谐波减速器的外部保护结构,它起到支撑和固定内部部件的作用。
壳体通常由铝合金或铸铁制成,具有良好的强度和刚性。
工作原理谐波减速器的工作原理基于谐波运动的特性。
当电机旋转驱动波发生器时,波发生器的柔性齿片会产生弹性变形,从而产生谐波运动。
这种谐波运动通过内齿圈与外齿圈的咬合,将旋转运动转变为减速后的旋转运动。
具体而言,当电机旋转时,波发生器的柔性齿片会随之变形,产生谐波运动。
这种谐波运动使得内齿圈与外齿圈之间产生相对运动,内齿圈带动外齿圈和齿轮一起旋转。
由于内齿圈的齿数较少,而外齿圈的齿数较多,所以旋转一周的时间内,输出轴旋转的角度会远小于输入轴的角度,从而实现减速效果。
谐波减速器的优点在于其传动效率高、精度高、结构紧凑等特点。
然而,它也存在一些缺点,比如承载能力相对较低、使用寿命较短等。

简述谐波齿轮减速装置的工作原理谐波齿轮减速器是一种利用柔性齿轮传递动力和减速的装置,其工作原理基于谐波振动的特性。
谐波振动是一种周期性的振动,其频率是整数倍于基频的振动。
谐波齿轮减速器通过利用谐波振动的特性,在输入轴和输出轴之间传递动力和减速。
谐波齿轮减速器的主要组成部分包括输入轴、输出轴、柔性齿轮和波发生器。
输入轴通过柔性齿轮与波发生器相连,输出轴则通过另一组柔性齿轮与波发生器相连。
波发生器是谐波齿轮减速器的核心部件,它通过椭圆轮的变形和转动来产生谐波振动。
在工作过程中,输入轴的旋转运动会使波发生器发生椭圆轮的变形,从而产生谐波振动。
这种振动会传递给与之相连的柔性齿轮,使其发生弹性变形。
当输入轴继续旋转时,柔性齿轮上的齿会与固定齿轮相互啮合,从而传递动力和减速。
最后,输出轴通过柔性齿轮的变形和转动来输出动力和减速后的运动。
谐波齿轮减速器的工作原理可以简单归纳为以下几个步骤:1. 输入轴旋转:当输入轴开始旋转时,波发生器也会随之发生旋转。
2. 波发生器变形:波发生器内部的椭圆轮会因为输入轴的旋转而发生变形,产生谐波振动。
3. 柔性齿轮变形:谐波振动会传递给与波发生器相连的柔性齿轮,使其发生弹性变形。
4. 齿轮啮合:当柔性齿轮变形后,其上的齿会与固定齿轮相互啮合,传递动力和减速。
5. 输出轴运动:最后,柔性齿轮的变形和转动会使输出轴输出动力和减速后的运动。
谐波齿轮减速器的工作原理基于谐波振动的特性,利用柔性齿轮的变形和转动来传递动力和减速。
相比传统的齿轮传动装置,谐波齿轮减速器具有结构简单、体积小、传动精度高等优点。
因此,在一些需要精确控制和大扭矩输出的领域,如机床、机器人、航天器等,谐波齿轮减速器得到了广泛的应用。
谐波减速器的结构组成谐波减速器是一种常用的机械传动装置,它具有结构简单、紧凑、效率高的特点。
下面将从结构组成的角度对谐波减速器进行介绍。
谐波减速器的主要结构组成包括输入轴、输出轴、柔性齿轮、刚性齿轮和波发生器等部件。
1. 输入轴:输入轴是谐波减速器的动力输入端,将电机或其他动力设备输出的动力传递给谐波减速器。
输入轴通常由高强度合金钢制成,具有足够的强度和刚度。
2. 输出轴:输出轴是谐波减速器的动力输出端,它将经过减速的动力传递给机械设备。
输出轴通常也由高强度合金钢制成,以保证传递动力的可靠性和稳定性。
3. 柔性齿轮:柔性齿轮是谐波减速器的核心部件,它由多个柔性齿片组成。
柔性齿片通常由高强度不锈钢或弹性材料制成,具有良好的弯曲和弹性性能。
柔性齿轮通过与波发生器的齿槽咬合,实现动力的传递和转换。
4. 刚性齿轮:刚性齿轮是谐波减速器的固定齿轮,它由多个齿槽组成。
刚性齿轮通常由高强度合金钢制成,具有较高的硬度和刚度。
刚性齿轮通过与柔性齿轮的齿槽咬合,实现动力的传递和转换。
5. 波发生器:波发生器是谐波减速器的核心部件,它由多个波形发生器组成。
波形发生器通常由高强度合金钢制成,具有较高的硬度和刚度。
波形发生器的齿槽形状特殊,能够与柔性齿轮的齿片咬合,通过变形传递动力。
谐波减速器的工作原理是:当输入轴带动波发生器旋转时,波形发生器的齿槽将推动柔性齿轮的齿片变形,从而实现动力的传递和转换。
柔性齿轮的变形产生非线性的齿轮传动效果,将输入轴的高速低扭矩动力转换为输出轴的低速高扭矩动力。
谐波减速器具有许多优点,如结构紧凑、体积小、传动比大、重载能力强等。
同时,由于谐波减速器的齿轮传动采用非接触式传动,摩擦损失小,传动效率高。
因此,谐波减速器广泛应用于机械设备中,如机床、机器人、包装设备等。
谐波减速器是一种结构简单、紧凑、效率高的机械传动装置。
它由输入轴、输出轴、柔性齿轮、刚性齿轮和波发生器等部件组成,通过柔性齿轮和刚性齿轮的咬合,实现动力的传递和转换。
谐波传动原理谐波传动Harmonic Drive是由美国发明家C. Walt Musser马瑟于上世纪50年代中期发明创造的。
一、谐波传动装置的构成谐波传动装置主要由三个基本零部件构成,即波发生器、柔轮和刚轮:波发生器:由柔性轴承与椭圆形凸轮组成。
波发生器通常安装在减速器输入端,柔性轴承内圈固定在凸轮上,外圈通过滚珠实现弹性变形成椭圆形。
柔轮:带有外齿圈的柔性薄壁弹性体零件,通常安装在减速器输出端。
刚轮:带有内齿圈的刚性圆环状零件,一般比柔轮多两个轮齿,通常固定在减速器机体上。
二、谐波减速原理谐波做为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
当波发生器装入柔轮内圆时,迫使柔轮产生弹性变形而呈椭圆状,使其长轴处柔轮轮齿插入刚轮的轮齿槽内,成为完全啮合状态;而其短轴处两轮轮齿完全不接触,处于脱开状态。
由啮合到脱开的过程之间则处于啮出或啮入状态。
当波发生器连续转动时:迫使柔轮不断产生变形,使两轮轮齿在进行啮入、啮合、啮出、脱开的过程中不断改变各自的工作状态,产生了所谓的错齿运动,从而实现了主动波发生器与柔轮的运动传递。
三、谐波传动特点1.精度高:多齿在两个180度对称位置同时啮合,因此齿轮齿距误差和累积齿距误差对旋转精度的影响较为平均,可得到极高的位置精度和旋转精度。
2.传动比大:单级谐波齿轮传动的传动比可达i=30~500,且结构简单,三个在同轴上的基本零部件就可实现高减速比。
3.承载能力高:谐波传动中,齿与齿的啮合是面接触,加上同时啮合齿数比较多,因而单位面积载荷小,承载能力较其他传动形式高。
4. 体积小、重量轻:相比普通的齿轮装置,体积和重量可以大幅降低,实现小型化、轻量化。
5.传动效率高、寿命长。
6.传动平稳、无冲击,噪音小编号规格1 品种规格我公司的谐波减速器按照柔轮的形状可分为杯形与中空形两大类,每类又根据柔轮的长度又分为标准和短筒两种型号。
同一种机型包括若干传动比。
2 编号规则产品编号由我司英文缩写、产品形式代号、规格代号、减速比、结构代号及输入端与波发生器凸轮连接形式六部分组成,各部分之间用“-”连接。
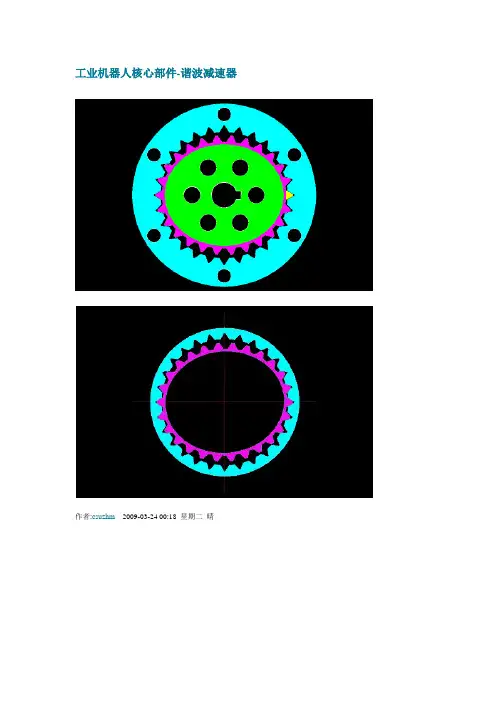
工业机器人核心部件-谐波减速器作者:csuzhm2009-03-24 00:18 星期二晴机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有:1)RV减速机构;2)谐波减速机械;3)摆线针轮减速机构;4)行星齿轮减速机械;5)无侧隙减速机构;6)蜗轮减速机构;7)滚珠丝杠机构;8)金属带/齿形减速机构;9)球减速机构。
其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改):谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。
谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。
(一)传动原理它主要由三个基本构件组成:(1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮;(2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮;(3)波发生器H,它相当于行星架。
作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。
柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。
波发生器是使柔轮产生可控弹性变形的构件。
当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。
周长上其他区段的齿处于啮合和脱离的过渡状态。
当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。
在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以n 表示。
常用的是双波和三波两种。
双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。
故为目前应用最广的一种。
谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即z2-z1=n式中z2、z2--分别为刚轮与柔轮的齿数。

谐波减速器是一种精密的传动装置,通过利用柔性变形元件(柔性齿轮)实现减速和传动的功能。
其工作原理可以简要描述如下:
输入轴:驱动力通过输入轴传递给减速器。
柔性齿轮(柔性变形元件):柔性齿轮由内齿和外齿组成,内齿与输入轴连接,外齿与输出轴连接。
谐波发生器:谐波发生器是一个不可旋转的结构,它通过内齿与柔性齿轮内齿咬合,并通过一个轴向运动使柔性齿轮产生弯曲和变形。
减速效果:谐波发生器的轴向运动使柔性齿轮产生弯曲和变形,从而改变了内齿和外齿的啮合情况。
通过柔性齿轮的弯曲和变形,输入轴传递的驱动力被减速并传递给输出轴。
总结起来,谐波减速器利用柔性齿轮的弯曲和变形实现减速和传动的功能。
谐波发生器的轴向运动使柔性齿轮产生变形,改变了齿轮之间的啮合情况,从而实现减速效果。
谐波减速器具有结构紧凑、精度高、扭矩大等特点,在一些精密传动领域有广泛的应用。
谐波传动减速器技术指标说明:这里只介绍了XB1系列,其他机型可参考,详细说明请咨询我公司。
1.传动效率谐波传动减速器的输出功率与输入功率之比,或有用功与总功之比。
因输入转速、速比及使用情况(包括负载,润滑)不同,效率也不同。
通常情况下,XB1系列约为75%-90%,XB3系列、XBF系列约为50%-60%,XB2约为30%。
2.空回(运动损失)在空载情况下,改变输入轴转向时,输出轴转角的滞后量。
允许值:XB1系列为6分、3分、1分;XB3、XBF系列为6分、3分;XB2系列为6分。
3.传动误差当输入轴单向旋转时,输出轴的实际转角与理论转角之差。
允许值:XB1系列为6分、3分、1分;XB3、XBF系列为6分、3分;XB2系列为6分。
4.空载静态起动力矩、输入轴上组件的飞轮矩(GD2)和转动惯量(I)机型空载静态启动力矩飞轮矩GD2(kgf·m2)转动惯量I(kg·m2)5.平均寿命谐波传动减速器的寿命主要取决于波发生器轴承的寿命.在额定负载下,输入轴转速为1500转/分钟时,柔性轴承寿命不低于5000小时,平均工作寿命大于10000小时。
6.超载能力允许在启动、停止瞬间超载一倍,工作时允许瞬间超载不大于1.5倍。
7.扭转刚度输入轴固定,在输出轴上负载扭矩与相应扭转角之增量比值。
注:KA-含空回及在约20%额定扭矩时,输出轴弹性变形的扭转刚度系数KB-在此以后,当输出轴上的扭矩加到额定扭矩时,产生弹性变形的扭转刚度系数。
单位:kgf·cm/rad注:上表指减速器整机测试数据,三大件的扭转刚度比整机约高一倍以上。
谐波传动减速器工艺装配1、安装前全部零件清洗干净。
2、安装时先将波发生器装入柔轮,然后边转动波发生器,边将带有波发生器的柔轮,装入刚轮。
3、拆卸的程序与安装时相反。
但拆卸时,必须保证刚轮轮啮无偏斜地与柔轮啮脱开,它们的变形或啮面擦伤。
4、柔轮装入刚轮中时,检查轮啮啮合是否对称,短轴上间隙应相等,即A1=A2,如下图5、安装前,组件内所有零件表面都应涂敷00#半流体润滑脂或润滑油。
P r e c i s i o n G e a r i n g&M o t i o n C o n t r o l{{{The Basic Component Set1) T he Wave generator (WG) is a thin raced bearings assembly fi tted onto an elliptical plug, and normally is the rotating input member.2) T he Flexspline (FS) is a non-rigid ring with external teeth on a slightly smaller pitch diameter than the Circular Spline. It is fi tted over and is elastically defl ected by the Wave Generator.3) T he Circular Spline (CS) is a rigid ring with internal teeth, engaging the teeth of the Flexspline across the major axis of the Wave Generator.4) T he Dynamic Spline (DS) is a rigid ring havinginternal teeth of same number as the Flexspline. It rotates together with the Flexspline and serves as the output member. It is identifi ed by chamfered corners at its outside diameter.ContentsCompact, High Ratio, In-Line Gearing .............................2The Basic Component Set ................................................2Confi guration .....................................................................3Typical Installation .............................................................3Ordering Information .........................................................3Dimensions ........................................................................4Performance Ratings ........................................................5Lubrication .........................................................................6Installation .........................................................................6Effi ciency ...........................................................................7No-Load Running Torque, Starting Torque,and Back Driving Torque (7)Compact, High Ratio, In-Line GearingHarmonic Drive HDUF “Pancake” type component set offers the designer high ratio, in-line mechanical powertransmissions in extremely compact confi gurations. The component set consists of four elements: the Wave generator, an elliptical bearing assembly; the Flexspline, a non-rigid ring with external teeth; and the Circular Spline and the Dynamic Spline, rigid internal gears.Rotation of the Wave Generator imparts a rotating elliptical shape to the Flexspline causing progressive engagement of its external teeth with the internal teeth of the Circular Spline and the Dynamic Spline. The fi xed Circular Spline has two more teeth than the Flexspline, thereby imparting relative rotation to the Flexspline at a reduction ratio corresponding to the difference in the number of teeth. With the same number of teeth, the Dynamic Spline rotates with and at the same speed as the Flexspline.Confi gurations1) Reduction GearingWG Input CS Fixed DS Output Ratio as listedInput and output in opposite direction.2) Reduction Gearing WG Input CS Output DS FixedRatio1 R+1Input and output in same direction.OutputInputOutputInputOutputInput4) Differential WG Control Input CS Main-drive Input DS Main-drive OutputNumerous differential functions can be obtained by combinations of speeds and rotations on the three shafts.3) Reduction Gearing WG Fixed CS Output DS InputRatioR R+1Input and output in same direction.OutputInputOrdering InformationPancake model with the single row bearing Wave Generator Size 20Reduction ratio 80:1Component setBacklash optimized to below 3 arc minutes (Optional)Suffi x indicating that the set is specially modifi ed or designed according to customer requirements.HDUF 20-80-2G-BL3-SPTypical InstallationHDUF “pancake” type component sets are easier to use than conventional gearing. All that is required is suitable bearing support for the input and output shaft, and a means of fi xing the circular spline against rotation.The simplicity of HDUF component sets is demonstrated in the typical arrangements shown below.1. Wave Generator2. Flexspline3. Circular Spline4. Dynamic Spline5. Motor6. I nput Shaft or Motor Shaft7. Output ShaftDimensionsMaximum housing I.D. for Flexspline axial containment is L. The surface hardness in the region where the Flexspline abuts the housing is recommended to be HRC 29–34.Performance Ratings* Thermal limited–50% duty cycle with on time not exceeding 15 minutes.** This torque is not to be exceeded under any circumstances.*** Rating at input speed below 500 rpm is same as for 500 rpm.**** Backlash measured at output with the input locked, maximum value.LubricationOil lubrication ratings are based on Molub Alloy gear Oil No. 80. See table for recommended oil level and volume for horizontal shaft mounting.For vertical mounting the recommended level is at the wave generator bearing ball centerline or midpoint ofGrease lubricated ratings are based on Harmonic Grease HC-1, which has been specially developed for Harmonic Drive lubrication. Alternate lubricants include Molub Alloy Grease No. 2, Shell Alvania EP 1 and their equivalents.For retention of grease within the tooth mesh areaand the ball bearing, it is recommended that the L dimension (see HDUF Dimensions, page 4) be extended further inward to at least S.mmInstallationThe Dynamic Spline is distinguished by its chamfered outer edge. HDUF Component Sets may be operated in any attitude. Recommended installed relationships are shown below:Housing ToleranceEffi ciencyEffi ciency varies depending on input speed, ratio, load level, temperature, and type of lubrication. The effects of these factors are illustrated in the curves shown below.HDUF Effi ciency vs. Ratio, Temperature, and Lubricant (At Rated Torque)Input Speed 3400 rpmInput Speed 500 rpmInput Speed 1700 rpmNo-Load Running Torque, Starting Torque, and Backdriving TorqueValues quoted are based on actual tests with the component sets assembled in housings, and takes into consideration friction resistance of oils seals, and churning of oil.。