工业机器人的RV减速器和谐波减速器有什么区别
- 格式:docx
- 大小:97.47 KB
- 文档页数:4

1+X工业机器人测试题含答案1、使用赋值指令时,可以在不同的数据类型之间进行赋值。
A、正确B、错误答案:B2、工具快换装置能够让不同的介质例如气体、电信号、超声等从机器臂连通到末端执行器。
A、正确B、错误答案:A3、在示教盒程序编辑器中进行编程时,为编程界面的简洁,可以“隐藏声明”。
A、正确B、错误答案:A4、可以使用三点法进行用户(工件)坐标系标定。
A、正确B、错误答案:A5、使用MoveC指令完成一个完整的圆周运动需要三条指令。
A、正确B、错误答案:A6、使用对准功能,工具可以对准的坐标系有大地坐标系、基坐标系、工具坐标系和工件坐标系。
A、正确B、错误答案:B7、赋值指令右侧的值由表达式生成,而表达式只能由文本、常数、变量组合构成。
A、正确B、错误答案:B8、使用对准功能可以很快的将工具调整到和某坐标系垂直的姿态。
A、正确9、工具负载数据是指装在机器人法兰上的工具的负载数据。
A、正确B、错误答案:A10、真空发生器具有高效、清洁、经济和小型等优点,常用于机械、电子等领域。
A、正确B、错误答案:A11、在启动机器人系统进行自动操作前,示教人员应将暂停使用的安全防护装置功效恢复。
A、正确B、错误答案:A12、使用圆弧运动指令进行圆弧运动时,一条圆弧指令运动的弧度不能超过240度。
A、正确B、错误答案:A13、使用“TCP(默认方向)”的方法标定工具坐标系,点数只能选择4。
A、正确B、错误答案:B14、在例行程序文件列表中可以对程序进行重命名、删除、复制和移动的操作。
A、正确B、错误答案:A15、关节机器人上主要采用两类减速器:分别为谐波减速器和RV减速器。
A、正确B、错误答案:A16、ABB IRB120型机器人本体上有急停按钮。
答案:B17、相对而言,红外测距仪测距的准确度不高,测量距离相对较短,但由于价格低,也很适合于机器人应用。
A、正确B、错误答案:A18、利用示教编程方法编写机器人程序时,一般需完成程序名编写、程序编写、程序修改、程序单步调试,然后才能进行自动运行。
市场数据(人民币)市场优化平均市盈率18.90 国金机器人指数1381 沪深300指数3805 上证指数3024 深证成指10779 中小板综指11289满在朋 分析师 SAC 执业编号:S1130522030002 manzaipeng @ 陈传红 分析师 SAC 执业编号:S1130522030001 chenchuanhong @ 孟灿 分析师 SAC 执业编号:S1130522050001 mengcan @ 樊志远 分析师 SAC 执业编号:S1130518070003 fanzhiyuan @ 罗露 分析师 SAC 执业编号:S1130520020003 luolu @ 张哲源 分析师 SAC 执业编号:S1130522020002 zhangzhey @Optimus 正式发布,人形机器人开启新时代 事件介绍 ⏹ 北京时间2022年10月1日,特斯拉2022 AI Day 上正式发布人形机器人“擎天柱”(Optimus )原型机。
本次发布会现场,特斯拉机器人展示了行走、挥手、摇摆等动作,同时分享了其在汽车工厂搬运、给植物浇水、移动金属零件的视频。
马斯克表示人形机器人具备一定程度智能化,可以替代体力劳动,有望在3-5年后实现量产,量产后将达到数百万台,其价格可能低于2万美元。
核心观点 ⏹本次原型机数据披露更为详实,人形机器人发展确定性强。
从本次公布数据来看,原型机的身高约173cm ,体重73kg ,较原官方数据增加17公斤。
Optimus 拥有合计50个自由度(身体28个,单手11个)。
执行系统方面,原型机全身共有28个执行器,共采用6种不同结构单元设计,应对不同载荷需求。
同时机器人关节设计加入仿生学理论,如膝盖关节分为4个子电机,和人类膝盖关节/韧带构成类似。
Optimus 手部单机数6个,可提起20磅物品。
动力系统方面,该产品搭载T esla 自研电池技术,其配备一个带有集成电子设备的2.3kWh 电池组,可支持一整天耗电。
项目1 工业机器人的认知思考与练习1.简答题1.各国科学家是如何定义机器人的?答:国际标准化组织:机器人是一种仿生的、具有自动控制能力的、可重复编程的多功能、多自由度的操作机械;美国机器人协会:机器人是一种用于移动各种材料、零件、工具或专用装置的,通过程序动作来执行各种任务的,并具有编程能力的多功能操作机;日本机器人协会:机器人是一种带有存储器和末端操作器的通用机械,它能够通过自动化的动作替代人类劳动;我国科学家:机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
2.机器人四大家分别是哪些机器人公司?答:ABB、KUKA、FAUNC和安川被称为机器人四大家。
3.我国工业机器人的主流品牌有哪些?你还了解哪些工业机器人制造企业?答:我国工业机器人的主流品牌主要以沈阳新松、南京埃斯顿、安徽埃夫特和广州数控等机器人制造企业为代表。
4.机器人系统有哪几部分组成?分别有何作用?答:机器人系统通常由三部分和六个子系统构成。
三部分包括机械部分、传感部分和控制部分,六个子系统包括机械系统、驱动系统、控制系统、感知系统、机器人—环境交互系统和人机交互系统。
机械部分由驱动系统和机械系统组成,该部分多为机器人的本体。
控制部分由人机交互系统和控制系统组成,该部分多为机器人的控制器。
传感部分由感知系统和机器人—环境交互系统组成,该部分将机器人本体的运动状态以及外部信号传输到机器人控制器,从而正确驱动机器人本体运动。
机械系统是由关节连在一起的许多机械连杆的集合体,形成开环运动学链系。
连杆类似于人类的小臂、大臂等;关节通常分为转动关节和移动关节,转动关节允许连杆之间发生旋转运动,而移动关节仅允许连杆做直线运动。
由关节—连杆机构所构成的机械结构一般有3个主要部件:臂、腕和手,它们可在规定范围内运动。
驱动系统是使各种机械部件产生运动的装置。
第二章工业机器人的机械结构和运动控制章节目录2.1 工业机器人的系统组成2.1.1 操作机2.1.2 控制器2.1.3 示教器2.2 工业机器人的技术指标学习目标导入案例课堂认知扩展与提高本章小结思考练习2.3 工业机器人的运动控制2.3.1 机器人运动学问题2.3.2 机器人的点位运动…2.3.3 机器人的位置控制课前回顾何为工业机器人?工业机器人具有几个显著特点,分别是什么?工业机器人的常见分类有哪些,简述其行业应用。
学习目标认知目标*熟悉工业机器人的常见技术指标*掌握工业机器人的机构组成与各部分的功能*了解工业机器人的运动控制能力目标*能够正确识别工业机器人的基本组成*能够正确判别工业机器人的点位运动和连续路径运动导入案例国产机器人竞争力缺失关键技术是瓶颈众所周知,中国机器人产业由于先天因素,在单体与核心零部件仍然落后于日、美、韩等发达国家。
虽然中国机器人产业经过 30 年的发展,形成了较为完善的产业基础,但与发达国家相比,仍存在较大差距,产业基础依然薄弱,关键零部件严重依赖进口。
整个机器人产业链主要分为上游核心零部件(主要是机器人三大核心零部件——伺服电机、减速器和控制系统,相当于机器人的“大脑”)、中游机器人本体(机器人的“身体”)和下游系统集成商(国内 95% 的企业都集中在这个环节上)三个层面。
课堂认知2.1 工业机器人的系统组成第一代工业机器人主要由以下几部分组成:操作机、控制器和示教器。
对于第二代与第三代工业机器人还包括感知系统和分析决策系统,它们分别由传感器与软件实现。
工业机器人系统组成2.1.1 操作机操作机(或称机器人本体)是工业机器人的机械主体,是用来完成各种作业的执行机构。
它主要由机械臂、驱动装置、传动单元与内部传感器等部分组成。
关节型机器人操作机基本构造机器人操作机最后一个轴的机械接口通常为一连接法兰,可接装不同的机械操作装置,如夹紧爪、吸盘、焊枪等。
(1) 机械臂关节型工业机器人的机械臂是由关节连在一起的许多机械连杆的集合体。
机器人关节传动用精密减速器研究进展吴素珍1,2,陈丹1(1.河南工程学院,河南郑州451191;2.大连交通大学,辽宁大连116028)摘要:机器人已广泛应用于汽车、机械加工、电子电气、橡胶及塑料、食品工业等领域,机器人关节传动的主要装置已成为亟待解决的重要课题.阐述了精密齿轮传动的研究现状,介绍了目前较先进的机器人关节用各类减速传动机构的工作原理、结构及特点等,相互比较了各类减速机构的优缺点,得出RV 减速器应用前景较好,并就如何提高机器人关节减速器性能提出建议和解决方案.关键词:机器人;精密机械传动;减速器中图分类号:TH113.2+2文献标志码:A 文章编号:1008-7516(2014)06-0058-06Research progress on application of precision gear reducer in robotjoint transmissionWu Suzhen 1,2,Chen Dan 1(1.Henan Institute of Engineering,Zhengzhou 451191,China ;2.Dalian Jiaotong University,Dalian116028,China )Abstract:The robot has been widely used in automobile,machining,electronics and electrical,rubber and plastic,food industry and other fields.Robot joint transmission 's main device is an important subject which urgently needs to be addressed.The current research status of precision gear transmission,the working principle,structure and characteristics of more advanced robot joint with all kinds of gear transmission were reviewed in this paper.The advantages and disadvantages of all kinds of gear reducers were also compared and a new kind of robot joint transmission precision gear reducer,RV gear reducer was selected.We put forward suggestions and solutions for how to improve performance of robot joint gear reducer.Key words:robot ;precision mechanical transmission ;reducer随着科学技术的发展,在机械、航空、汽车工业等领域采用机器人代替人力已是走向高水平工业化的发展方向.机器人技术受到各国政府的高度重视,用于机器人关节传动的主要装置也受到众多研究者的关注.本文将用于机器人关节传动的主要传动装置加以归纳和总结,以方便工业机器人关节传动精密传动减速器的理论研究和使用研究.1国内外精密传动的发展现状目前,精密齿轮传动类型主要有滤波传动、谐波传动、摆线针轮传动、RV 传动等.日本、德国、美国、丹麦等国的精密传动研制在材料和制造工艺方面处于国际领先水平[1-3].滤波齿轮传动是由重庆大学梁锡昌、王家序教授发明的一种结构紧凑、体积相对小、大传动比的新型精密传动机构,目前还处于研究阶段[4].从20世纪50年代起,美国、日本等发达国家就开始进行谐波齿轮传动的研究,其中以USM 公司规收稿日期:2014-09-14基金项目:河南省教育厅自然科学基金(12A460002)作者简介:吴素珍(1978—),女,河南濮阳人,博士生,讲师.主要从事现代机械传动研究.doi:10.3969/j.issn.1008-7516.2014.06.012第42卷第6期426Vol.No.河南科技学院学报Journal of Henan Institute of Science and Technology 2014年12月2014Dec.模最大.我国从20世纪60年代就开始谐波方面的研制工作,但到目前为止国内谐波齿轮的专业生产厂家仍然很少.摆线针轮传动和RV 传动是由德国人发明,后来日本人引进并发展壮大的技术.德国、日本等国家关于摆线针轮传动和RV 传动研制生产已经形成系列化、批量化[5-11].在国内,中国人第一次见到摆线针轮行星传动减速器是20世纪70年代在北京的一次展览会上.由于其具有输入输出同轴性、传动比大、效率高、结构紧凑等特点,引起了不少科研人员的注意.目前我国大连交通大学等院校及研究机构研制的摆线针轮传动和RV 传动产品,主要技术性能指标已达到了国际先进水平,但在国际上同日本的最新RV 系列产品还有一定的差距,需要进一步在提高传动精度设计理论和RV 减速器批量生产上进行研究.2机器人关节传动用新型减速器2.1滤波齿轮传动滤波齿轮减速器属于NN 型少齿差减速器,由偏心减速机构、滤波花键机构、三向止推轴承3大部分组成[12].偏心减速机构由内齿轮、钢球、偏心轮、滚动轴承组成;滤波花键机构由钢球、偏心轮、圆柱齿轮和内齿轮组成[4-6].滤波减速器实物图和主要零部件如图1所示,传动结构如图2所示.图1滤波减速器Fig.1Filtering gearreducer图2滤波传动结构Fig.2Structure chart of filter transmission滤波齿轮传动传动原理如图3所示.注:1-输出内齿轮,2、3-圆柱齿轮(双联齿轮),4-固定内齿轮,H -偏心轴.图3滤波齿轮传动传动原理Fig.3Transmission principle diagram of filtering gear principles吴素珍等:机器人关节传动用精密减速器研究进展第6期图3中偏心轴H 为输入端,齿轮1为输出端,双联齿轮3与固定内齿轮4啮合实现了第1级传动,双联齿轮2、3与输出内齿轮啮合实现了第2级传动.偏心轴的旋转中心与固定内齿轮、输出内齿轮的旋转中心同轴,当通过偏心轴输入转矩时,由于双联齿轮的偏心,及输入齿轮是固定的,双联齿轮2、3一方面绕自身轴线自转,同时还绕偏心轴旋转中心公转,双联齿轮2、3所受两方面的力同时作用于与其啮合的输出内齿轮1,获得输出运动.滤波齿轮传动具有传动精度高、可靠性高、寿命长、传递扭矩大、能耗低、体积小、传动比大,结构相对简单等优点.广泛应用于航天、航空、运载等领域[13].2.2谐波齿轮传动谐波齿轮传动是通过柔轮的弹性变形实现运动传递动力的一种的新型传动[14].其主要由波发生器、柔轮、刚轮组成.结构外形图如4所示.刚轮波发生器柔轮图4谐波齿轮Fig.4Harmonic gear谐波齿轮传动,当波发生器装入柔轮后,迫使柔轮在长轴处产生径向变形成椭圆状.椭圆的长轴两端,柔轮外齿与刚轮内齿沿全齿高相啮合,短轴两端则处于完全脱开状态,其他各点处于啮合与脱开的过渡阶段.设刚轮固定,波发生器进行逆时针转动,当其长轴转到图示啮入状态处时,柔轮进行了顺时针旋转.当长轴不断旋转时,柔轮相继由啮合转向啮出,由啮出转向脱出,由脱开转向啮入,有啮入转向啮合,从而迫使柔轮进行连续旋转[15].传动原理如图5所示.脱开脱开滚轮啮合啮合啮入啮出柔轮啮出刚轮啮入转臂图5谐波传动传动原理Fig.5Transmission principle diagram of harmonic principles谐波传动具有运动精度高、传动比大、质量小、体积小、较小的传动惯量等优点,最重要的是能在密闭空间传递运动,这一点是其他任何机械传动无法实现的.其缺点为在谐波齿轮传动中每转柔轮发生2次椭圆变形,极易引起材料的疲劳损坏,损耗功率大,同时其引起的扭转变形角达到20′~30′,甚至更大,受轴承间隙等影响可能引起3′~6′回程误差,不具有自锁功能.谐波传动适用于质量和尺寸受限(如小的机械手关节)、位置精度要求高的场合.如美国的研制2014年河南科技学院学报(自然科学版)NASA空间飞行器,德国的ERS-1/2地球观测卫星的太阳翼与天线驱动机构,日本的观测卫星,我国“风云”系列卫星扫描辐射计、火箭伺服机构等.2.3摆线针轮行星传动摆线针轮行星传动是行星轮采用变幅外摆线的一种少齿差行星齿轮传动,属于K-H-V行星齿轮传动.主要由摆线轮、针轮、行星架和输出结构4部分组成[16-20].其主要零部件如图6所示.注:1-输入轴,2-双偏心套,3-转臂轴承,4-摆线轮,5-柱销,6-柱销套,7-针齿销,8-针齿套,9-输出轴.图6摆线针轮行星传动的主要零部件Fig.6M ain components of cycloid pin gear planetary gear transmission摆线针轮行星传动,当输入轴1旋转时,通过偏心轴2带动摆线轮4旋转,由于偏心轴上的摆线轮4与针齿3啮合限制,摆线轮旋转时即绕自身轴线自转,又绕输入轴轴线公转,然后借助W输出机构6,将摆线轮的低速自转动通过销轴,传递给输出轴5,从而获得较低的输出转速.传动原理如图7所示.注:1-输入轴,2-偏心轴,3-针轮,4-摆线轮,5-输出轴,6-输出机构(W机构).图7摆线针轮行星齿轮传动原理Fig.7Transmission principles of cycloid pin gear planetary gear摆线针轮行星传动的特点是单级传动比为6~119,一级传动效率达0.90~0.95.可代替两级普通圆柱齿轮减速器,体积可减少1/2~2/3,质量约减少1/3~1/2.缺点是摆线针轮减速器的机构太复杂,制造、安装精度要求太高,转臂轴承受力大,影响轴承寿命和承载能力[21-26].摆线针轮行星传动最大传动功率200kW,最高输入转速1800r/min,广泛应用于矿山、化工、起重机械、工程机械等领域[27-31].2.4RV传动减速器RV传动是在摆线针轮行星传动的基础上发展起来的一种新型精密传动,属于2K-V行星齿轮传动[32].外形结构如图8所示.吴素珍等:机器人关节传动用精密减速器研究进展第6期图8RV减速器外形结构Fig.8Configuration of RV reducerRV 传动减速器是一种2级行星齿轮传动减速机构.第1级减速是通过中心齿轮0与行星齿轮2啮合,按照中心齿轮与行星齿轮的齿数比进行减速.传动过程中如果渐开线中心轮1顺时针转动,那么行星轮2既绕自身轴线逆时针自转,同时绕中心轮轴线公转,第1级传动中的渐开线行星轮2与曲柄轴3连成一体,并通过偏心轴3带动摆线轮4作偏心运动,作为第2级传动部分的输入,第2级减速是摆线轮4与针轮5啮合减速.摆线轮与针轮啮合传动过程中,摆线轮在绕针轮轴线公转的同时,还将反方向自转,即顺时针转动.最后,传动力通过曲柄轴推动行星架输出机构顺时针方向转动.传动原理如图9所示.注:0-中心轮,1-输入轴,2-渐开线行星轮,3-偏心轴,4-摆线轮,5-针轮,6-输出机构,7-针齿壳.图9RV减速器传动原理Fig.9Transmission principles of RV reducerRV 针摆传动具有传动比范围大,只改变渐开线齿轮的齿数比就可获得很多传动比;传动精度高,传动误差为1′以下,回差误差在1.5′以下;传动机构置于行星架的支承主轴承内,轴向尺寸大大减小;RV 齿轮和销同时啮合数多,承载能力大;采用双柱支撑机构,扭转刚性大、振动小,耐冲击性强[33].RV 传动减速器已很大程度上逐渐取代单纯的摆线针轮传动装置,已广泛应用于机械、航空、汽车工业等领域[34-35].3机器人关节传动用各类减速器对比分析结合工业机器人性能、功能要求,各类精密传动减速器的性能指标对比如表1所示[4,13-14,16-19,36].表1精密减速器性能参数对比Tab.1Contrast table precision reducer performance parameters减速器滤波摆线针轮RV谐波减速比6~3206~119(单级)31~17170~320传动效率0.80~0.900.90~0.95(单级)0.85~0.920.70~0.90输出力矩一般好好一般占用空间小小较小中制造要求低高高高刚度一般一般高一般传动精度高高高高可靠性高一般较好一般由表1可知,谐波传动是通过柔轮的弹性变形实现运动传递,其弹性变形大,从而在传递载荷时的弹性变形回差也大,这就不可避免地会影响机器人的动态特性、抗冲击能力等,而且其运动精度还会随着2014年河南科技学院学报(自然科学版)吴素珍等:机器人关节传动用精密减速器研究进展第6期使用时间增长而显著降低;滤波减速器还处于初级研究阶段;而RV传动装置运动可靠性、保精度及寿命均高于其他齿轮传动机构,另外RV减速器还具有加一次润滑剂可以使用很长时间、寿命长、刚度好、减速比大、低振动、高精度、传动效率高、保养便利等优点,非常适于在机器人上使用.4结论与讨论目前机器人关节传动装置主要是谐波传动和RV传动.但由于谐波传动装置柔轮的弹性变形引起较大的回差,从而影响工业机器人的定位精度及动态特性,RV针摆传动装置代替谐波传动装置是机器人关节用减速装置的必然趋势.在国外,RV减速器已实现系列化、批量化生产,而我国还处于开发过程中.我国应提高机器人用减速器的制造工艺,注意新型材料选用,努力实现系列化、批量化生产.另外,今后我国在机器人RV减速器研制方面,应制定合理的零件制造工艺和可以补偿相关零件制造误差的装配工艺;严格控制影响减速器传动准确性、传动平稳性及载荷分布均匀性误差的主要因素,合理控制各公差范围;增强减速器的扭转刚度.需深入系统地研究RV传动装置优化设计理论与制造技术,努力开发新机型,提高我国自有知识产权的RV针摆驱动器的设计水平和性能,减少对国外技术的依赖,提高RV针摆驱动器的国产化技术水平.参考文献:[1]日高照晃,王宏猷,石田武ほか.サイクロイド歯車を用いたk-H-V形游星歯車装置の回転傅達誤差に開する研究(第1報解析方法)[J].日本機械学会論文集:C编,1994,60(570):645-653.[2]石田武ほか,王宏猷,日高照晃.サイクロイド歯車を用いたk-H-V形游星歯車装置の回転傅達誤差に開する研究(第2報各種加工誤差·組立誤差か回転傅達誤差に及ほす影響)[J].日本機械学会論文集:C编,1994,60,(578):278-285. [3]王宏猷ほか,日高照晃,石田武ほか.サイクロイド歯車を用いたk-H-V形游星歯車装置の回転傅達誤差に開する研究(第3報各種誤差に及ほす相互影響)[J].日本機械学会論文集:C编,1994,60,(578):286-293.[4]梁锡昌,王家序.滤波减速器:中国,200510057123.X[P].2005-06-16.[5]Li L X,Wang X Q,He W D.Optimum desing of High-speed railway locomotive traction gear[J].Chinese Journal of M echanicalEngineering,1996,9(4):278-285.[6]李力行,潜媛梅,任喜岩,等.ZD6型电动转辙机可靠性研究[J].大连铁道学院学报,1996(4):1-6.[7]Li L X,Wang X Q,He W D.Optimum desing of High-reliability High-speed railway locomotive traction gear[C]//lzhevsk,Russia:齿轮传动理论与技术国际会议,1996,12:433-438.[8]许洪基,陶燕光.摆线针轮行星传动[M]//机械工程手册电机工程手册编辑委员会.机械工程手册.2版.北京:机械工业出版社,1997:265.[9]何卫东,李欣,李力行.机器人用高精度RV摆线轮修形对回差影响的研究[J].机械传动,1999(1):60-66.[10]李力行,何卫东,王秀琦,等.机器人用高精度RV传动的研究[J].大连铁道学院学报,1999(2):1-5.[11]李力行,何卫东,王秀琦.机器人用高精度RV传动研究[C]//中国机械工程:国家自然科学基金委员会工程与材料科学部机械学科成果选集,1999,9(9):1001-1002.[12]官浩,王家序,石珍,等.基于Romax的滤波减速器齿轮修形[J].机械设计与研究,2013(6):28-31.[13]袁固兴,王家序,肖科,等.偏心误差对滤波减速器传动误差的影响研究[J].机械科学与技术,2013(2):252-256.[14]李奉生.基于PrO/Toolkit的谐波减速器CAD/CAM系统的研究与开发[D].天津:天津大学,2006.[15]张奎.摆线二次包络封闭式行星传动研究[D].重庆:重庆大学,2010.[16]机械设计手册编委会.机械传动设计手册:第3卷[M].北京:机械工业出版社,2004:82-182.[17]何卫东,李力行,徐永贤,等.高精度RV传动的受力分析及传动效率[J].机械工程学报,1996,7(3):60-67.[18]李力行,何卫,王秀琦,等.机器人用高精度RV传动的研究[J].大连铁道学院学报,1999(6):1-11.[19]何卫东,李力行.RV传动的效率及其受力分析[J].大连铁道学院学报,1992(4):73-81.[20]刘鸣熙.摆线针轮传动与小型RV减速器的研究[D].北京:北京交通大学,2008.[21]李力行,何卫东,李欣,等.动轴轮系齿轮传动设计[M]//朱孝录.齿轮传动设计手册.北京:化学工业出版社,2004:656-902.[22]李力行,洪淳赫.通用的摆线轮齿形方程式[J].齿轮,1980(2):11-15.(下转第67页)[23]李力行.摆线针轮行星传动的齿形修正及受力分析[J].机械工程学报,1986(1):35-39.[24]李力行,关天民,王子孚.大型摆线针轮行星传动的合理结构和齿形[J].机械工程学报,1988(3):26-31.[25]Li L X.The computer aided design of cycloid drive[J].Chinese Journal of M echanical Engineering,1990,3(2):221-231.[26].李力行,王子孚,刘银远,等.摆线针轮行星传动的计算机辅助设计[J].大连铁道学院学报,1992(1):23-34.[27]何卫东,李力行,关天民,等.摆线针轮减速机的逻辑诊断与故障树分析[J].大连铁道学院学报,1994(2):64-68.[28]李力行,何卫东,李欣.摆线针轮传动[M ]//现代机械传动手册编辑委员会.现代机械传动手册.北京:机械工业出版社,1995:315-337.[29]李力行.The new optimum tooth profile of the cycloidal gear and the computer aided design of cycloid drive[C].米兰:IFTOM M第九届机器理论与机构学世界大会,1995:355-359.[30]李力行.为国争光,赶超世界先进———摆线针轮传动优化新齿形与CAD 软件达国际先进水平[C].北京:科学基金10周年科研成果交流会,1995:8-71.[31]李力行,关天民.承载能力新型摆线针轮行星传动可靠性试验的研究[J].大连铁道学院学报,1996(3):47-51.[32]李力行.轮系[M ]//徐灏.机械设计手册.2版.北京:机械工业出版社,2000:1-187.[33]何卫东,李力行.徐永贤,等.高精度RV 传动的受力分析及传动效率[J].机械工程学报,2000(4):104-110.[34]何卫东,李力行,李欣.机器人用高精度RV 减速器中摆线轮的优化新齿形[J].机械工程学报,2000(3):51-55.[35]陈兵奎,谭磊.摆线包络行星传动接触优先元分析及系统开发[J].机械强度,2013,35(3):366-371.[36]关天民.FA 型摆线针轮行星传动齿形优化方法与相关理论的研究[D].大连:大连交通大学,2005.(责任编辑:卢奇)参考文献:[1]Fortunato E,Barquinha P,Pimentel A,et al .Recent advances in ZnO transparent thin film transistors[J].Thin Solid Films,2005,487(1/2):205-211.[2]Shao W,M a R I,Liu B.Fabrication and properties of ZAO powder,sputtering target materials and the related films [J].Journal of University of Science and Technology Beijing,2006,13(4):346-349.[3]Chen M ,Pei Z I,Sun C,et al .ZAO :an attractive potential substitute for ITO in flat display panels [J].M ateriala Science andEngineering B,2001,85(2/3):212-217.[4]Zimmermann B,Glatthaar M ,Niggenann M ,et al .ITO free wrap through organic solar cells-A module concept for cost-efficientreel-to-reel production[J].Solar Energy M ater Solar Cells,2007,91:374.[5]Lagemaat J,Barnes T M ,Rumbles G,et al .Organic solar cells with acarbon nanotubes replacing In2O3:Sn as the transparentelectrode[J].Appl Phys Lett.,2006,88:233503.[6]Lee J Y,Connor S T,Cui Y,et al .Solution-processed metal nanowire mesh transparent electrodes[J].Nano Lett.,2008,8:689.[7]O ’Connor B,An K H,Pipea K P,et al .Enhanced optical field intensity distribution in organic photovoltanic devices using external coatings[J].Appl Phys Lett.,2006,89:233502.[8]熊传溪,闻获江.聚合物基导电复合材料的导电机理[J].玻璃钢/复合材料,1998,5:36-38.[9]姜得生,余海湖,周灵德.自组装金纳米粒子薄膜AFM 研究[J].电子显微学报,2004(2):177-182.(责任编辑:卢奇)(上接第63页)赵小静等:金电极的制备和特性研究第6期。
工业机器人基础知识大全,看完秒懂!1.主体主体机械即机座和实行机构,包括大臂、小臂、腕部和手部,构成的多自由度的机械系统。
有的机器人另有行走机构。
工业机器人有6个自由度乃至更多腕部通常有1~3个活动自由度。
2.驱动系统工业机器人的驱动系统,按动力源分为液压,气动和电动三大类。
依据需求也可由这三种范例组合并复合式的驱动系统。
或者通过同步带、轮系、齿轮等机械传动机构来间接驱动。
驱动系统有动力装置和传动机构,用以实行机构发生相应的动作,这三类根本驱动系统的各有特点,现在主流的是电动驱动系统。
由于低惯量,大转矩交、直流伺服电机及其配套的伺服驱动器(交换变频器、直流脉冲宽度调制器)的普遍接纳。
这类系统不需能量转换,运用方便,控制灵敏。
大多数电机后面需安装精细的传动机构:减速器。
其齿运用齿轮的速率转换器,将电机的反转数减速到所要的反转数,并得到较大转矩的装置,从而降低转速,添加转矩,当负载较大时,一味提升伺服电机的功率是很不划算的,能够在适宜的速率范畴内通过减速器来进步输出扭矩。
伺服电机在低频运转下容易发热和出现低频振动,长时间和重复性的工作不利于确保其准确性、牢靠地运转。
精细减速电机的存在使伺服电机在一个适宜的速率下运转,加强机器体刚性的同时输出更大的力矩。
如今主流的减速器有两种:谐波减速器和RV减速3.控制系统机器人控制系统是机器人的大脑,是决定机器人功用和功能的主要要素。
控制系统是按照输入的程序对驱动系统和实行机构收回指令信号,并进行控制。
工业机器人控制技术的主要任务便是控制工业机器人在工作空间中的活动范围、姿势和轨迹、动作的时间等。
具有编程简单、软件菜单操纵、友好的人机交互界面、在线操纵提示和运用方便等特点。
控制器系统是机器人的中心,外国有关公司对我国实验紧密封闭。
连年来随着微电子技术的开展,微处置器的功能越来越高,而价钱则越来越便宜,现在市集上曾经出现了1-2美金的32位微处置器。
高性价比的微处置器为机器人控制器带来了新的开展机会,使开辟低本钱、高功能的机器人控制器成为可能。
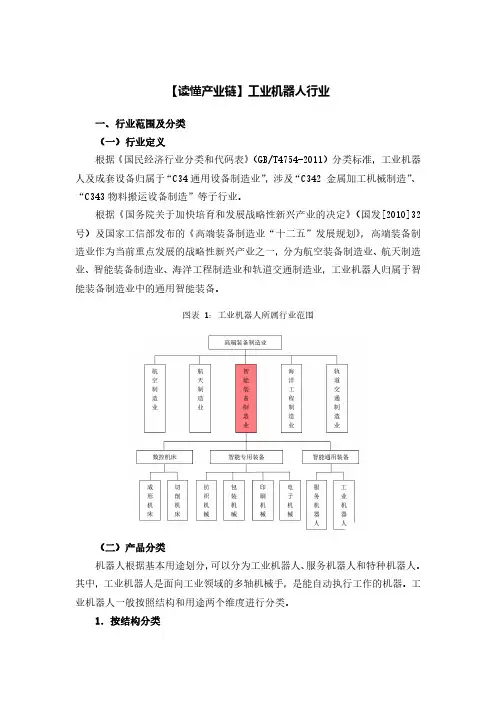
【读懂产业链】工业机器人行业一、行业范围及分类(一)行业定义根据《国民经济行业分类和代码表》(GB/T4754-2011)分类标准,工业机器人及成套设备归属于“C34通用设备制造业”,涉及“C342 金属加工机械制造”、“C343物料搬运设备制造”等子行业。
根据《国务院关于加快培育和发展战略性新兴产业的决定》(国发[2010]32号)及国家工信部发布的《高端装备制造业“十二五”发展规划》,高端装备制造业作为当前重点发展的战略性新兴产业之一,分为航空装备制造业、航天制造业、智能装备制造业、海洋工程制造业和轨道交通制造业,工业机器人归属于智能装备制造业中的通用智能装备。
图表 1:工业机器人所属行业范围(二)产品分类机器人根据基本用途划分,可以分为工业机器人、服务机器人和特种机器人。
其中,工业机器人是面向工业领域的多轴机械手,是能自动执行工作的机器。
工业机器人一般按照结构和用途两个维度进行分类。
1.按结构分类工业机器人可以分为直角坐标机器人、圆柱坐标机器人、球坐标机器人和多关节机器人。
其中,多关节机器人是应用前景最为看好、技术门槛最高的工业机器人,具备高效、精度高、灵活性强等优势。
关节机器人,也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一。
适合用于诸多工业领域的机械自动化作业,比如,自动装配、喷漆、搬运、焊接等工作。
按照机器人的构造分类:①四轴、五轴和六轴关节机器人,拥有四个、五个或六个旋转轴,类似于人类的手臂。
应用领域有装货、卸货、喷漆、表面处理、测试、测量、弧焊、点焊、包装、装配、切屑机床、固定、特种装配操作、锻造、铸造等。
②托盘关节机器人(DELTA),二个或四个旋转轴,以及机械抓手的定位锁紧装置。
应用领域有装货、卸货、包装、特种搬运操作、托盘运输等。
③平面关节机器人(SCARA)三个互相平行的旋转轴和一个线性轴。
应用领域有装货、卸货、焊接、包装、固定、涂层、喷漆、粘结、封装、特种搬运操作、装配等。
工业机器人的RV减速器和谐波减速器有什么区别
作为工业机器人核心零部件的精密减速器,与通用减速器相比,机器人用减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。
大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器
1
RV减速器:用于转矩大的机器人腿部腰部和肘部三个关节,负载大的工业机器人,一二三轴都是用RV。
相比谐波减速机,RV减速机的关键在于加工工艺和装配工艺。
RV减速机具有更高的疲劳强度、刚度和寿命,不像谐波传动那样随着使用时间增长,运动精度会显著降低,其缺点是重量重,外形尺寸较大。
▲RV-E型减速器
谐波减速器:用于负载小的工业机器人或大型机器人末端几个轴,谐波减速器是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器。
谐波减速器主要包括:刚轮、柔轮、轴承和波发生器三者,四者缺一不可。
其中,刚轮的齿数略大于柔轮的齿数。
谐波减速机用于小型机器人特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。
▲谐波减速器
两者都是少齿差啮合,不同的是谐波里的一种关键齿轮是柔性的,它需要反复的高速变形,所以它比较脆弱,承载力和寿命都有限。
RV通常是用摆线针轮,谐波以前都是用渐开线齿形,现在有部分厂家使用了双圆弧齿形,这种齿形比渐开线先进很多。
减速器的两巨头是Nabtesco和Hamonica Drive,他们几乎垄断了全球的机器人用减速器。
这两种减速器都是微米级的加工精度,光这一条在量产阶段可靠性高就很难了,更别说几千转的高速运转,而且还要高寿命。
谐波减速器由“柔轮、波发生器、刚轮、轴承”这四个基本部件构成。
柔轮的外径略小于刚轮的内径,通常柔轮比刚轮少2个齿。
波发生器的椭圆型形状决定了柔轮和刚轮的齿接触点分布在介于椭圆中心的两个对立面。
波发生器转动的过程中,柔轮和刚轮齿接触部分开始啮合。
波发生器每正时针旋转180°,柔轮就相当于刚轮逆时针旋转1个齿数差。
在180°对称的两处,全部齿数的30%以上同时啮合,这也造就了其高转矩传送。
相比谐波减速器,RV传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,还具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
RV减速器是由摆线针轮和行星支架组成,以其体积小、抗冲击力强、扭矩大、定位精度高、振动小、减速比大等诸多优点被广泛应用于工业机器人、机床、医疗检测设备、卫星接收系统等领域。
RV减速器的壳体和摆线针轮是通过实体的钢来发生传动的,因此承载能力强。
而谐波减速器的柔轮可不断发生变形来传递扭矩,这一点决定了谐波减速器承受大扭矩和冲击载荷的能力有限,因此一般运用在前端。
2 RV减速器和谐波减速器两者的优劣势
•谐波减速器结构简单紧凑,适合于小型化、低、中载荷的应用。
•RV减速器刚性好、抗冲击能力强、传动平稳、精度高,适合中、重载荷的应用,但RV减速器需要传递很大的扭矩,承受很大的过载冲击,保证预期的工作寿命,因而在设计上使用了相对复杂的过定位结构,制造工艺和成
本控制难度较大。
RV减速器内部没有弹性形变的受力元件,所以能够承受
一定扭矩。
RV减速器的轴承是其薄弱环节,受力时很容易突破轴承受力极
限而导致轴承异常磨损或破裂。
在高速运转时这个问题更突出,所以RV减速机的额定扭矩随输入转速下降非常明显。
3 减速器之间是否存在取代关系
正方观点:RV减速器较机器人中常用的谐波传动具有高得多的疲劳强度、刚度和寿命,而且回差精度稳定,不像谐波传动那样随着使用时间增长运动精度就会显著降低。
所以许多国家的高精度机器人传动多采用RV减速器,因此,RV减速器在先进机器人传动中有逐渐取代谐波减速器的发展趋势。
这些产品在某些型号上确实存在替代关系,但这几类减速器只能实现部分替代。
绝大部分情况下,各类减速器很难实现替换,比如在速比方面,谐波和RV的速比都要远远大于行星,所以小速比领域是行星的天下。
当然行星的速比是可以做大的,但是很难去替换谐波和RV。
又比如刚性方面,行星和RV的刚性要好于谐波,在体现刚性的使用工况下,谐波很难有好的表现。
谐波减速器的特点是轻和小,在这方面,行星和RV却很难做到。
所以各类减速器只能在一部分情况下可实现替换,但是如果一种产品全方位替换另一种产品是不现实的。
反方观点:各类减速器之间不能相互取代,而是一种互补的关系。
RV和谐波这两种传动有互补性,但也不排除结构设计优化和制造工艺突破后,在中低载荷应用领域形成局部竞争。
免责声明:本文系网络转载,版权归原作者所有。
但因转载众多,无法确认真正原始作者,故仅标明转载来源。
本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。