S7-200特殊继电器
- 格式:pdf
- 大小:133.43 KB
- 文档页数:7
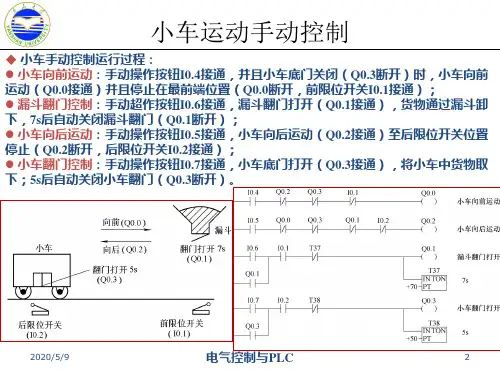
S7-200PLC实现星三角降压启动星三角降压启动的继电器电路图与控制图根据工艺要求进行PLC电路图设计。
PLC电路图设计如下:根据星三角启动电路图画出流程框架图如下PLC软元件地址分配如下:I区(输入区)I0.0 启动按钮SB2I0.1 停止按钮SB1I0.2 电源断路器QFQ区Q0.0 主电路接触器KM1Q0.1 星型启动接触器KM2Q0.2 三角形接触器KM3T区T37 10秒定时器根据电路图,流程图和分配好的软元件地址进行编程。
程序参考图如下:控制线路星形——三角形(Y —△)降压起动是指电动机起动时,把定子绕组接成星形,以降低起动电压,减小起动电流;待电动机起动后,再把定子绕组改接成三角形,使电动机全压运行。
Y —△起动只能用于正常运行时为△形接法的电动机。
1.按钮、接触器控制Y —△降压起动控制线路图 2.19 (a )为按钮、接触器控制Y —△降压起动控制线路。
线路的工作原理为:按下起动按钮SB1 ,KM1 、KM2 得电吸合,KM1 自锁,电动机星形起动,待电动机转速接近额定转速时,按下SB2 ,KM2 断电、KM3 得电并自锁,电动机转换成三角形全压运行。
2.时间继电器控制Y —△降压起动控制线路图 2.19 ( b )为时间继电器自动控制Y —△降压起动控制线路,电路的工作原理为:按下起动按钮SB1 ,KM1 、KM2 得电吸合,电动机星形起动,同时KT 也得电,经延时后时间继电器KT 常闭触头打开,使得KM2 断电,常开触头闭合,使得KM3 得电闭合并自锁,电动机由星形切换成三角形正常运行。
(1)线路设计思想Y—△降压起动也称为星形—三角形降压起动,简称星三角降压起动。
这一线路的设计思想仍是按时间原则控制起动过程。
所不同的是,在起动时将电动机定子绕组接成星形,每相绕组承受的电压为电源的相电压(220V),减小了起动电流对电网的影响。
而在其起动后期则按预先整定的时间换接成三角形接法,每相绕组承受的电压为电源的线电压(380V),电动机进入正常运行。
特殊继电器及中断事件号基础知识主讲:雷老师湖北祥辉电气自动化培训中心一>常用的特殊继电器及其功能二>引起的中断事件号一>常用的特殊继电器及其功能1)SMB0字节(系统状态位)SM0.0PLC运行时这一位始终为l,是常0N继电器。
SM0.l PLC首次扫描时为一个扫描周期。
用途之一是调用初始化使用。
SM0.3开机进入RUN方式将0N一个扫描周期。
SM0.4该位提供了一个周期为一分钟,占空比为0.5的时钟。
SM0.5该位提供了一个周期为一秒钟,占空比为0.5的时钟。
2)SMB1字节(系统状态位)SM1.0当执行某些命令时,其结果为0时,该位置1。
SM1.1当执行某些命令时,其结果溢出或出现非法数值时,该位置1。
SM1.2当执行数学运算时,其结果为负数时,该位置1。
SM1.6当把一个非BCD数转换为二进制数时,该位置1。
SM1.7当ASCll不能转换成有效的十六进制数时,该位置1。
3)SMB2字节(自由口接收字符)SMB2为自由口通讯方式下,从PLC端口0或端口1接收到的每一个字符。
4)SMB3字节(自由口奇偶校验)SM3.0为端口0或端口1的奇偶校验出错时,该位置1。
5)SMB4字节(队列溢出)SM4.0当通讯中断队列溢出时,该位置1。
SM4.1当输入中断队列溢出时,该位置1。
SM4.2当定时中断队列溢出时,该位置1。
SM4.3在运行时刻,发现编程问题时,该位置1。
SM4.4当全局中断允许时,该位置1。
SM4.5当(口0)发送空闲时,该位置1。
SM4.6当(口l)发送空闲时,该位置1。
6)SMB5字节(I/O状态)SM5.0有I/O错误时,该位置1。
SM5.1当I/O总线上接了过多的数字量I/O点时,该位置1。
SM5.2当I/O总线上接了过多的模拟量I/O点时,该位置1。
SM5.7当DP标准总线出现错误时,该位置1。
7)SMB6字节(CPU识别寄存器)SM6.7~6.4=0000为CPU212/CPU222SM6.7~6.4=0010为CPU214/CPU224SM6.7~6.4=0110为CPU221SM6.7~6.4=1000为CPU215SM6.7~6.4=1001为CPU216/CPU2268)SMB8到SMB21字节(I/O模块识别和错误寄存器)SMB8模块0识别寄存器SMB9模块0错误寄存器SMB10模块1识别寄存器SMB11模块1错误寄存器SMB12模块2识别寄存器SMB13模块2错误寄存器SMB14模块3识别寄存器SMB15模块3错误寄存器SMB16模块4识别寄存器SMB17模块4错误寄存器SMB18模块5识别寄存器SMB19模块5错误寄存器SMB20模块6识别寄存器SMB21模块6错误寄存器9)SMW22到SMW26字节(扫描时间)SMW22上次扫描时间SMW24进入RUN方式后,所记录的最短扫描时间SMW26进入RUN方式后,所记录的最长扫描时间10)SMB28和SMB29字节(模拟电位器)SMB28存储模拟电位0的输入值SMB29存储模拟电位l的输入值11)SMB30和SMB130字节(自由口控制寄存器)SMB30控制自由口0的通讯方式SMB130控制自由口1的通讯方式12)SMB34和SMB35字节(定时中断时间间隔寄存器)SMB34定义定时中断0的时间间隔(从5ms…255ms,以1ms为增量)SMB35定义定时中断l的时间间隔(从5ms…255ms,以1ms为增量)13)SMB36到SMB65字节(高速计数器HSC0、HSCl和HSC2寄存器)SMB36HSC0当前状态寄存器SMB37HSC0控制寄存器SMD38HSC0新的当前值SMD42HSC0新的予置值SMB46HSC1当前状态寄存器SMB47HSC1控制寄存器SMD48HSC1新的当前值SMD52HSC1新的予置值SMB56HSC2当前状态寄存器SMB57HSC2控制寄存器SMD58HSC2新的当前值SMD62HSC2新的予置值14)SMB66到SMB85字节(监控脉冲输出PTO和脉宽调制PWM功能)15)SMB86到SMB94,SMB186到SMB179字节(接收信息控制)SMB86到SMB94为通讯口0的接收信息控制SMB186到SMB179为通讯口1的接收信息控制接收信息状态寄存器SMB86和SMB186:接收信息控制寄存器SMB87和SMB187:16)SMB98和SMB99字节(有关扩展总线的错误号)17)SMB131到SMB165字节(高速计数器HSC3、HSC4和HSC5寄存器)18)SMB166到SMB179字节(PTO0、PTO1的包络步的数量、包络表的地址和V存储器中表的地址)二>引起的中断事件号输入信号(8项).通讯口(6项).定时器(4项).高速计数器(14项).脉冲输出指令(2项)引起的中断事件表3-9-l中断描素CPU221CPU222CPU224CPU226事件号0I0.0上升沿有有有有1I0.0下降沿有有有有2I0.1上升沿有有有有3I0.1下降沿有有有有4I0.2上升沿有有有有5I0.2下降沿有有有有6I0.3上升沿有有有有7I0.3下降沿有有有有8端口0接收字符有有有有9端口0发送字符有有有有10定时中断0(SMB34)有有有有11定时中断1(SMB35)有有有有12HSC0当前值=预置值有有有有13HSC1当前值=预置值有有14HSC1输入方向改变有有15HSC1外部复位有有16HSC2当前值=预置值有有17HSC2输入方向改变有有18HSC2外部复位有有有19PLS0脉冲数完成中断有有有有20PLS1脉冲数完成中断有有有有21T32当前值=预置值有有有有22T96当前值=预置值有有有有23端口0接收信息完成有有有有24端口1接收信息完成有25端口1接收字符有26端口l发送字符有27HSC0输入方向改变有有有有28HSC0外部复位有有有有29HSC4当前值=预置值有有有有30HSC4输入方向改变有有有有31HSC4外部复位有有有有32HSC3当前值=预置值有有有有33HSC5当前值=预置值有有有有S7-200可以在梯形图编辑器内的任何位置右击鼠标并选择插入中断。
特殊标志继电器(SM )有些辅助继电器具有特殊功能或存储系统的状态变量、有关的控制参数和信息,我们称为特殊标志继电器。
用户可以通过特殊标志来沟通PLC 与被控对象之间的信 息,如可以读取程序运行过程中的设备状态和运算结果信息,利用这些信息用程序实现一定的控制动作。
用户也可通过直接设置某些特殊标志继电器位来使设备实现 某种功能。
特殊标志继电器用“SM ”表示,特殊标志继电器区根据功能和性质不同具有位、字节、字和双字操作方式。
其中SMB0、SMB1为系统状态字,只能读取其中的状态数据,不能改写,可以位寻址。
系统状态字中部分常用的标志位说明如下: SM0.0:始终接通;SM0.1:首次扫描为1,以后为0,常用来对程序进行初始化; SM0.2:当机器执行数学运算的结果为负时,该位被置1; SM0.3:开机后进入RUN 方式,该位被置1一个扫描周期;SM0.4:该位提供一个周期为1分钟的时钟脉冲,30秒为1,30秒为0; SM0.5:该位提供一个周期为1秒钟的时钟脉冲,0.5秒为1,0.5秒为0; SM0.6:该位为扫描时钟脉冲,本次扫描为1,下次扫描为0; SM1.0:当执行某些指令,其结果为0时,将改位置1;SM1.1:当执行某些指令,其结果溢出或为非法数值时,将改位置1; SM1.2:当执行数学运算指令,其结果为负数时,将改位置1; SM1.3:试图除以0时,将改位置1;S7-200中SM0.0的用法:1、SM0.0在程序运行时始终为ON 。
2、SM0.0是一个无条件的常闭触点,用来启动无条件运行的指令。
只要上电,SM0.0必然是“1”。
因此程序中那些不受任何条件限制,必须要执行的指令就用它作为触发触点。
3、问:程序有时要在指令前加SM0.0,为什么不直接连在母线上,不是一样吗?最佳答案:因为,S7-200的指令是不能直接连在“母线”上的,这不符合语法要求。
SM0.0是不可控的触点,适用于无条件触发的场合,并非每个指令都需要SM0.0。
盛年不重来,一日难再晨。
及时宜自勉,岁月不待人。
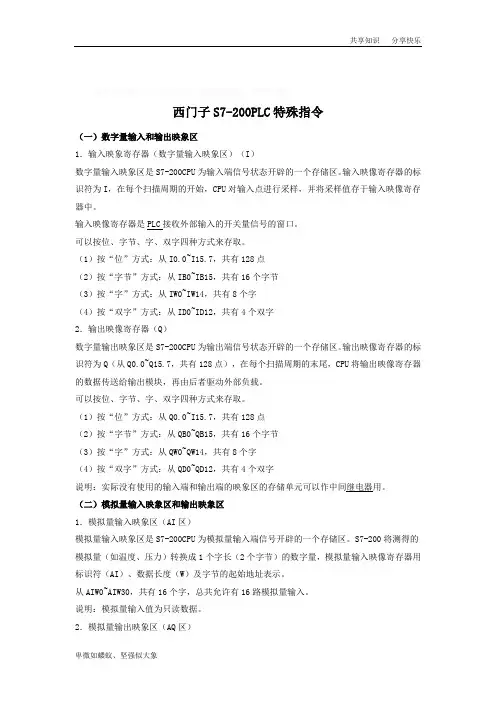
西门子S7-200PLC特殊指令(一)数字量输入和输出映象区1.输入映象寄存器(数字量输入映象区)(I)数字量输入映象区是S7-200CPU为输入端信号状态开辟的一个存储区。
输入映像寄存器的标识符为I,在每个扫描周期的开始,CPU对输入点进行采样,并将采样值存于输入映像寄存器中。
输入映像寄存器是PLC接收外部输入的开关量信号的窗口。
可以按位、字节、字、双字四种方式来存取。
(1)按“位”方式:从I0.0~I15.7,共有128点(2)按“字节”方式:从IB0~IB15,共有16个字节(3)按“字”方式:从IW0~IW14,共有8个字(4)按“双字”方式:从ID0~ID12,共有4个双字2.输出映像寄存器(Q)数字量输出映象区是S7-200CPU为输出端信号状态开辟的一个存储区。
输出映像寄存器的标识符为Q(从Q0.0~Q15.7,共有128点),在每个扫描周期的末尾,CPU将输出映像寄存器的数据传送给输出模块,再由后者驱动外部负载。
可以按位、字节、字、双字四种方式来存取。
(1)按“位”方式:从Q0.0~I15.7,共有128点(2)按“字节”方式:从QB0~QB15,共有16个字节(3)按“字”方式:从QW0~QW14,共有8个字(4)按“双字”方式:从QD0~QD12,共有4个双字说明:实际没有使用的输入端和输出端的映象区的存储单元可以作中间继电器用。
(二)模拟量输入映象区和输出映象区1.模拟量输入映象区(AI区)模拟量输入映象区是S7-200CPU为模拟量输入端信号开辟的一个存储区。
S7-200将测得的模拟量(如温度、压力)转换成1个字长(2个字节)的数字量,模拟量输入映像寄存器用标识符(AI)、数据长度(W)及字节的起始地址表示。
从AIW0~AIW30,共有16个字,总共允许有16路模拟量输入。
说明:模拟量输入值为只读数据。
2.模拟量输出映象区(AQ区)模拟量输出映象区是S7-200CPU为模拟量输出端信号开辟的一个存储区。
S7-200SMARTPLC软元件讲述,入门必备PLC的编程软元件实质上为存储器单元,每个单元都有唯一的地址。
为方便不同的编程功能需要,存储器单元作了分区,因此有不同类型的编程元件。
软元件是PLC内部具有一定功能的器件,这些器件由电子电路和寄存器及存储器等单元组成;它是PLC内部的虚拟元件,没有物理器件,我们看不见,摸不着;它是PLC程序执行所需要的元件。
西门子S7-200 SMART PLC所有软元件符号有13个:I(输入继电器)、Q(输出继电器)、M(辅助继电器)、SM (特殊辅助继电器)、V(变量存储器)、L(局部变量存储器)、S (顺序控制继电器)、T(定时器)、C(计数器)、HC()、AI(模拟量输入映像寄存器)、AQ(模拟量输出映像寄存器)、AC(累加器)一、软元件I输入继电器,也称为输入映像寄存器。
在PLC的输入单元上,每一个数字量的输入点,对应着输入映像寄存器的一个位,主要用于接收外部开关信号。
PLC外部开关信号闭合时,输入继电器的线圈得电,在程序中其常开触点闭合,常闭触点断开。
输入继电器触点在程序中可以不限次的使用。
二、软元件Q输出继电器,也称为输出映像寄存器。
在PLC的输出单元上,每一个数字量的输出点,对应着输出映像寄存器的一个位,主要用于驱动外部负载。
一个输出继电器只有一个与输出端子连接的常开触点(又称硬触点),而内部常开触点和常闭触点可以有很多个。
三、软元件M在PLC程序设计中,经常需要一些软中间继电器,主要是起到中间过渡或辅助作用。
它的功能与传统继电器控制线路中的中间继电器相同。
S7-200提供的中间继电器的地址范围是:M0.0~M31.7,共256个,分为两类:1、普通中间继电器(非断电保持型)(M0.0~M13.7),在PLC 电源中断后,状态变为OFF。
当电源恢复后,程序使其变为ON外,其它仍保持OFF。
2、断电保持型中间继电器(M14.0~M31.7),在PLC电源中断后,它具有保持断电前的瞬间状态的功能,并在恢复供电后继续断电前的状态。
西门子S7200 特殊标志继电器(SM)详解有些辅助继电器具有特殊功能或存储系统的状态变量、有关的控制参数和信息,我们称为特殊标志继电器。
用户可以通过特殊标志来沟通PLC与被控对象之间的信息,如可以读取程序运行过程中的设备状态和运算结果信息,利用这些信息用程序实现一定的控制动作。
用户也可通过直接设置某些特殊标志继电器位来使设备实现某种功能。
特殊标志继电器用“SM”表示,特殊标志继电器区根据功能和性质不同具有位、字节、字和双字操作方式。
其中SMB0、SMB1为系统状态字,只能读取其中的状态数据,不能改写,可以位寻址。
系统状态字中部分常用的标志位说明如下:SM0.0:始终接通;SM0.1:首次扫描为1,以后为0,常用来对程序进行初始化;SM0.2:当机器执行数学运算的结果为负时,该位被置1;SM0.3:开机后进入RUN方式,该位被置1一个扫描周期;SM0.4:该位提供一个周期为1分钟的时钟脉冲,30秒为1,30秒为0;SM0.5:该位提供一个周期为1秒钟的时钟脉冲,0.5秒为1,0.5秒为0;SM0.6:该位为扫描时钟脉冲,本次扫描为1,下次扫描为0;SM1.0:当执行某些指令,其结果为0时,将改位置1;SM1.1:当执行某些指令,其结果溢出或为非法数值时,将改位置1;SM1.2:当执行数学运算指令,其结果为负数时,将改位置1;SM1.3:试图除以0时,将改位置1;S7-200中SM0.0的用法:1、SM0.0在程序运行时始终为ON。
2、SM0.0是一个无条件的常闭触点,用来启动无条件运行的指令。
只要上电,SM0.0必然是“1”。
因此程序中那些不受任何条件限制,必须要执行的指令就用它作为触发触点。
3、问:程序有时要在指令前加SM0.0,为什么不直接连在母线上,不是一样吗?最佳答案:因为,S7-200的指令是不能直接连在“母线”上的,这不符合语法要求。
SM0.0是不可控的触点,适用于无条件触发的场合,并非每个指令都需要SM0.0。
S7-200PLC程序详解(图文并貌)一、时间继电器:TON 使能=1计数,计数到设定值时(一直计数到32767),定时器位=1。
使能=0复位(定时器位=0)。
TOF 使能=1,定时器位=1,计数器复位(清零)。
使能由1到0负跳变,计数器开始计数,到设定值时(停止计数),定时器位=0。
如下图:图1:使能=1时,TOF(T38)的触点动作图图2:使能断开后,计数到设定值后,TOF(T38)的触点动作图(其中T38常开触点是在使能由1到0负跳变后计数器计时到设定值后变为0的)TONR 使能=1,计数器开始计数,计数到设定值时,计数器位=1。
使能断开,计数器停止计数,计数器位仍为1,使能位再为1时,计数器在原来的计数基础上计数。
以上三种计数器可以通过复位指令复位。
正交计数器A相超前B相90度,增计数B相超前A相90度,减计数当要改变计数方向时(增计数或减计数),只要A相和B相的接线交换一下就可以了。
二、译码指令和编码指令:译码指令和编码指令执行结果如图所示:DECO是将VW2000的第十位置零(为十进制的1024),ENCO输入IN最低位为1的是第3位,把3写入VB10(二进制11)。
三、填表指令(ATT)S7-200填表指令(ATT)的使能端(EN)必须使用一个上升沿或下降沿指令(即在下图的I0.1后加一个上升沿或下降沿),若单纯使用一个常开触点,就会出现以下错误:这一点在编程手册中也没有说明,需要注意。
其他的表格指令也同样。
四、数据转换指令使用数据转换指令时,一定要注意数据的范围,数据范围大的转换为数据范围小的发注意不要超过范围。
如下图所示为数据的大小及其范围。
(1)BCD码转化为整数(BCD_I)关于什么是BCD码,请参看《关于BCD码》。
BCD码转化为整数,我是这样理解的:把BCD码的数值看成为十进制数,然后把BCD到整数的转化看成是十进制数到十六进制数的转化。
如下图所示,BCD码为54,转化为整数后为36。
西门子S7-200PLC特殊指令(一)数字量输入和输出映象区1.输入映象寄存器(数字量输入映象区)(I)数字量输入映象区是S7-200CPU为输入端信号状态开辟的一个存储区。
输入映像寄存器的标识符为I,在每个扫描周期的开始,CPU对输入点进行采样,并将采样值存于输入映像寄存器中。
输入映像寄存器是PLC接收外部输入的开关量信号的窗口。
可以按位、字节、字、双字四种方式来存取。
(1)按“位”方式:从I0.0~I15.7,共有128点(2)按“字节”方式:从IB0~IB15,共有16个字节(3)按“字”方式:从IW0~IW14,共有8个字(4)按“双字”方式:从ID0~ID12,共有4个双字2.输出映像寄存器(Q)数字量输出映象区是S7-200CPU为输出端信号状态开辟的一个存储区。
输出映像寄存器的标识符为Q(从Q0.0~Q15.7,共有128点),在每个扫描周期的末尾,CPU将输出映像寄存器的数据传送给输出模块,再由后者驱动外部负载。
可以按位、字节、字、双字四种方式来存取。
(1)按“位”方式:从Q0.0~I15.7,共有128点(2)按“字节”方式:从QB0~QB15,共有16个字节(3)按“字”方式:从QW0~QW14,共有8个字(4)按“双字”方式:从QD0~QD12,共有4个双字说明:实际没有使用的输入端和输出端的映象区的存储单元可以作中间继电器用。
(二)模拟量输入映象区和输出映象区1.模拟量输入映象区(AI区)模拟量输入映象区是S7-200CPU为模拟量输入端信号开辟的一个存储区。
S7-200将测得的模拟量(如温度、压力)转换成1个字长(2个字节)的数字量,模拟量输入映像寄存器用标识符(AI)、数据长度(W)及字节的起始地址表示。
从AIW0~AIW30,共有16个字,总共允许有16路模拟量输入。
说明:模拟量输入值为只读数据。
2.模拟量输出映象区(AQ区)模拟量输出映象区是S7-200CPU为模拟量输出端信号开辟的一个存储区。
目录第一章绪论 (2)1.1设计背景与意义 (3)1.2PLC在电动机正反转控制中的应用概况 (3)1.3设计要求与任务 (4)第二章控制系统设计 (5)2.1确定方案 (5)2.2硬件设计 (7)2.3程序设计 (11)第三章总结 (13)参考文献 (14)第一章绪论电能是现代大量应用的一种能量形式。
电能的生产、变换、传输、分配、使用和控制等都必须利用电机作为能量转换或信号变换的机电装置。
在工业企业中,大量应用电动机作为原动机去拖动各种生产机械。
如在机械工业、冶金工业、化学工业中,机床、挖掘机械、轧钢机、起重机械、抽水机、鼓风机等都要用大大小小的电动机来拖动。
随着生产的发展,某些特种电机必须具有快速响应、模仿性运动、和停止等更复杂而精巧的运动性能,因此,对电动机拖动系统及多电动机拖动系统提出了更高的要求,如要求提高加工精度与工作速度,要求快速起动、制动及逆转,实现在很宽的范围内调速及整个生产过程自动化等。
要完成这些任务,除电动机外,必须有自动控制设备,以组成自动化的电力拖动系统。
三相异步电动机的应用几乎涵盖了工农业生产和人类生活的各个领域,在这些应用领域中,三项异步电动机常常运行在恶劣的环境下,导致产生过流、短路、断相、绝缘老化等事故。
对于应用于大型工业设备重要场合的高压电动机、大功率电动机来说,一旦发生故障所造成的损失无法估量。
在生产过程,科学研究和其他产业领域中,电气控制技术应用十分广泛。
在机械设备的控制中,电气控制也比其他的控制方法使用的更为普遍。
可编程序控制器简称PLC,是以微处理器为核心的工业自动控制通用装置。
它具有控制功能强、可靠性高、使用灵活方便、易于扩展、通用性强等一系列优点。
尤其现代的可编程序控制器,其功能已经大大超过了逻辑控制的范围,还包括运动控制、闭环过程控制、数据处理、通信网络等。
它不仅可以取代传统的继电-接触器控制系统,进行复杂的生产过程控制,还可以应用于工厂自动化网络。
S7-200的编程元件1)输入继电器(I)输入继电器存取的地址范围是I0.0~I15.7。
2)输出继电器(Q)输出继电器存取的地址范围是Q0.0~Q15.7。
3)辅助继电器①通用辅助继电器(M)。
辅助继电器存取的地址范围是M0.0~M31.7。
②特殊辅助继电器(SM)。
特殊辅助继电器,又称特殊标志位存储器。
对于不同的CPU,特殊标志位存储器的地址范围有所不同,对于CPU224的地址范围为SM0.0~SM179.7,可按位、字节、字和双字来存取。
每一个特殊标志位存储器都有特定的功能,常用特殊辅助继电器元件见表1。
表1 S7-200系列PLC的常用特殊辅助继电器元件4)顺序控制继电器(S)顺序控制继电器存取的地址范围是S0.0~S31.7。
5)定时器(T)CPU222、CPU224及CPU226的定时器地址范围是T0~T255,用定时器地址(T和定时器号,如T0)来存取当前值和定时器位。
6)计数器(C)计数器的地址范围是C0~C255,用计数器地址(C和计数器号,如C0)来存取当前值和计数器位。
7)高速计数器(HC)高速计数器的地址范围根据CPU的型号有所不同,CPU221、CPU222各有4个高速计数器,分别是HC0~HC3,CPU224、CPU226各有6个高速计数器,分别是HC0~HC5。
8)数据存储器①变量存储器(V)变量存储器主要用于存储变量。
它可以存放程序执行过程中的中间变量,也可以保存与工序或任务相关的变量。
在进行数据处理时,变量存储器会被经常使用。
变量存储器存取的地址范围根据CPU的型号有所不同,CPU221、CPU222为V0.0~V2047.7,CPU224、CPU226为V0.0~V5119.7。
②局部变量存储器(L)局部变量存储器和变量存储器相类似,也是用来存储变量。
区别在于局部变量存储器主要用来存放局部变量,而变量存储器存放的是全局变量。
S7-200系列PLC有64个字节的局部存储器,PLC运行时,根据需要动态的分配局部变量存储器,其中60个字节可以作为暂时存储器,或给子程序传递参数,另外4个字节作为系统的保留字节。
符号地址注释Always_On SM0.0始终接通为 ONFirst_Scan_On SM0.1仅第一个扫描周期中接通为 ONRetentive_Lost SM0.2如果保持的数据丢失,接通为 ON 一个扫描周期RUN_Power_Up SM0.3以上电方式进入 RUN(运行)模式时,接通为 ON 一个扫描周期Clock_60s SM0.4在 1 分钟的循环周期内,接通为 ON 30 秒,关断为 OFF 30 秒Clock_1s SM0.5在 1 秒钟的循环周期内,接通为 ON 0.5 秒,关断为 OFF 0.5 秒Clock_Scan SM0.6扫描循环时钟,一个周期接通为 ON,下一个周期关断为 OFFMode_Switch SM0.7表明模式开关的当前位置:0 = TERM(终端),1 = RUN(运行)Result_0SM1.0特定指令的操作结果 = 0 时,置位为 1Overflow_Illegal SM1.1特定指令执行结果溢出或数值非法时,置位为 1Neg_Result SM1.2当运算结果为负时,置位为 1Divide_By_0SM1.3当尝试用零除时,置位为 1Table_Overflow SM1.4当填表指令尝试填充表格超限时,置位为 1Table_Empty SM1.5当 LIFO 或 FIFO 指令尝试读取空表时,置位为 1Not_BCD SM1.6当尝试将非 BCD 数转换为二进制数时,置位为 1Not_Hex SM1.7当 ASCII 数据无法转换为有效的十六进制数时,置位为 1Parity_Err SM3.0当端口 0 或端口 1 接收到一个有奇偶校验错误的字符时,置位为 1Comm_Int_Ovr SM4.0当通信中断队列溢出时,置位为 1 (仅在中断程序内有效)Input_Int_Ovr SM4.1当输入中断队列溢出时,置位为 1 (仅在中断程序内有效)Timed_Int_Ovr SM4.2当定时中断队列溢出时,置位为 1 (仅在中断程序内有效)RUN_Err SM4.3当检测到运行时间编程错误时,置位为 1Int_Enable SM4.4表示全局中断使能状态:1 = 中断已使能开放Xmit0_Idle SM4.5当发送器处于空闲状态时(端口 0),置位为 1Xmit1_Idle SM4.6当发送器处于空闲状态时(端口 1),置位为 1Force_On SM4.7当有数据被强制时,置位为 1 : 1 = 有数据被强制,0 = 无数据被强制(仅 22x 有效)IO_Err SM5.0当有任何 I/O 错误时,置位为 1Too_Many_D_IO SM5.1当有过多数字量 I/O 点与 I/O 总线连接时,置位为 1Too_Many_A_IO SM5.2当有过多模拟量 I/O 点与 I/O 总线连接时,置位为 1Too_Many_IM SM5.3当有过多智能 I/O 模块与 I/O 总线连接时,置位为 1DP_Err SM5.7当有 DP 标准总线错误时,置位为 1 (仅限S7-215)P0_Config_0SM30.0端口 0 选择自由口协议或系统协议Save_to_EEPROM_7SM31.7请求执行永久存储区保存操作(0 = 无请求,1 = 保存),保存完毕后 CPU 复位此位符号地址注释HSC0_Status_5SM36.5HSC0 当前计数方向状态:1 = 增计数HSC0_Status_6SM36.6HSC0 当前值等于预置值状态:1 = 相等HSC0_Status_7SM36.7HSC0 当前值大于预置值状态:1 = 大于HSC0_Reset_Level SM37.0HSC0 复位有效电平控制:0 = 高电平有效;1 = 低电平有效HSC0_Rate SM37.2HSC0 计数速率选择:0 = 4x(四倍速),1 = 1xHSC0_Dir SM37.3HSC0 计数方向控制:0 = 减计数;1 = 增计数HSC0_Dir_Update SM37.4HSC0 计数方向更新:0 = 无更新;1 = 更新方向HSC0_PV_Update SM37.5HSC0 预置值更新:0 = 无更新;1 = 更新预置值HSC0_CV_Update SM37.6HSC0 当前值更新:0 = 无更新;1 = 更新当前值HSC0_Enable SM37.7HSC0 使能:0 = 禁止;1 = 使能HSC1_Status_5SM46.5HSC1 当前计数方向状态:1 = 增计数HSC1_Status_6SM46.6HSC1 当前值等于预置值状态:1 = 相等HSC1_Status_7SM46.7HSC1 当前值大于预置值状态:1 = 大于HSC1_Reset_Level SM47.0HSC1 复位有效电平控制:0 = 高电平有效;1 = 低电平有效HSC1_Start_Level SM47.1HSC1 启动有效电平控制:0 = 高电平有效;1 = 低电平有效HSC1_Rate SM47.2HSC1 计数速率选择:0 = 4x(四倍速);1 = 1xHSC1_Dir SM47.3HSC1 计数方向控制:0 = 减计数;1 = 增计数HSC1_Dir_Update SM47.4HSC1 计数方向更新:0 = 无更新;1 = 更新方向HSC1_PV_Update SM47.5HSC1 预置值更新:0 = 无更新;1 = 更新预置值HSC1_CV_Update SM47.6HSC1 当前值更新:0 = 无更新;1 = 更新当前值HSC1_Enable SM47.7HSC1 使能:0 = 禁止;1 = 使能HSC2_Status_5SM56.5HSC2 当前计数方向状态:1 = 增计数HSC2_Status_6SM56.6HSC2 当前值等于预置值状态:1 = 相等HSC2_Status_7SM56.7HSC2 当前值大于预置值状态:1 = 大于HSC2_Reset_Level SM57.0HSC2 复位有效电平控制:0 = 高电平有效;1 = 低电平有效HSC2_Start_Level SM57.1HSC2 启动有效电平控制:0 = 高电平有效;1 = 低电平有效HSC2_Rate SM57.2HSC2 计数速率选择:0 = 4x(四倍速);1 = 1xHSC2_Dir SM57.3HSC2 计数方向控制:0 = 减计数;1 = 增计数HSC2_Dir_Update SM57.4HSC2 计数方向更新:0 = 无更新;1 = 更新方向HSC2_PV_Update SM57.5HSC2 预置值更新:0 = 无更新;1 = 更新预置值HSC2_CV_Update SM57.6HSC2 当前值更新:0 = 无更新;1 = 更新当前值HSC2_Enable SM57.7HSC2 使能:0 = 禁止;1 = 使能符号地址注释PLS0_Err_Abort SM66.4PTO0 包络中止:0 = 无错误;1 = 因 δ 计算错误中止PLS0_Cmd_Abort SM66.5PTO0 包络中止:0 = 未因用户命令中止;1 = 因用户命令中止PLS0_Ovr SM66.6PTO0 管道溢出:0 = 无溢出;1 = 管道溢出PLS0_Idle SM66.7PTO0 空闲:0 = PTO 正在执行;1 = PTO 空闲PLS0_Cycle_Update SM67.0PTO0/PWM0 周期时间值更新:1 = 写入新的周期时间PWM0_PW_Update SM67.1PTO0/PWM0 脉冲宽度值更新:1 = 写入新的脉冲宽度PTO0_PC_Update SM67.2PTO0 脉冲数更新:1 = 写入新的脉冲数PLS0_TimeBase SM67.3PTO0/PWM0 时基:0 = 1μs/单位;1 = 1ms/单位PWM0_Sync SM67.4PWM0 同步更新:0 = 非同步更新;1 = 同步更新PTO0_Op SM67.5PTO0:0 = 单段操作;1 = 多段操作PLS0_Select SM67.6PTO0/PWM0 模式选择:0 = PTO;1 = PWMPLS0_Enable SM67.7PTO0/PWM0 使能:1 = 使能PLS1_Err_Abort SM76.4PTO1 包络中止:0 = 无错误;1 = 因δ计算错误中止PLS1_Cmd_Abort SM76.5PTO1 包络中止:0 = 未因用户命令中止;1 = 因用户命令中止PLS1_Ovr SM76.6PTO1 管道溢出:0 = 无溢出;1 = 管道溢出PLS1_Idle SM76.7PTO1 空闲:0 = PTO正在执行;1 = PTO空闲PLS1_Cycle_Update SM77.0PTO1/PWM1 周期时间值更新:1 = 写入新的周期时间PWM1_PW_Update SM77.1PTO1/PWM1 脉冲宽度值更新:1 = 写入新的脉冲宽度PTO1_PC_Update SM77.2PTO1 脉冲数更新:1 = 写入新的脉冲数PLS1_TimeBase SM77.3PTO1/PWM1 时基:0 = 1μs/单位;1 = 1ms/单位PWM1_Sync SM77.4PWM1 同步更新:0 = 非同步更新;1 = 同步更新PTO1_Op SM77.5PTO1:0 = 单段操作;1 = 多段操作PLS1_Select SM77.6PTO1/PWM1 模式选择:0 = PTO;1 = PWMPLS1_Enable SM77.7PTO1/PWM1 使能:1 = 使能P0_Stat_Rcv_0SM86.0 1 = 信息接收终止:奇偶校验错误P0_Stat_Rcv_1SM86.1 1 = 信息接收终止:达到最大字符计数P0_Stat_Rcv_2SM86.2 1 = 信息接收终止:定时器到期P0_Stat_Rcv_5SM86.5 1 = 信息接收终止:收到结束字符P0_Stat_Rcv_6SM86.6 1 = 信息接收终止:输入参数错误或缺少起始或结束条件P0_Stat_Rcv_7SM86.7 1 = 信息接收终止:用户禁止命令P0_Ctrl_Rcv_1SM87.10 = 忽略断点状态;1 = 将断点状态用作信息起始检测P0_Ctrl_Rcv_2SM87.20 = 忽略SMW92,1 = 如果超过 SMW92 中的定时,终止接收符号地址注释P0_Ctrl_Rcv_3SM87.30 = 定时器是字符间定时器,1 = 定时器是信息间定时器P0_Ctrl_Rcv_4SM87.40 = 忽略 SMW90,1 = 使用 SMW90 中的数据检测空闲条件P0_Ctrl_Rcv_5SM87.50 = 忽略 SMB89,1 = 使用 SMB89 中的数据检测信息结束P0_Ctrl_Rcv_6SM87.60 = 忽略 SMB88,1 = 使用 SMB88 中的数据检测信息开始P0_Ctrl_Rcv_7SM87.70 = 信息接收功能被禁止,1 = 信息接收功能被使能P1_Config_0SM130.0端口 1 选择自由口协议或系统协议HSC3_Status_5SM136.5HSC3 当前计数方向状态:1 = 增计数HSC3_Status_6SM136.6HSC3 当前值等于预置值状态:1 = 相等HSC3_Status_7SM136.7HSC3 当前值大于预置值状态:1 = 大于HSC3_Dir SM137.3HSC3 计数方向控制:0 = 减计数;1 = 增计数HSC3_Dir_Update SM137.4HSC3 计数方向更新:0 = 无更新;1 = 更新方向HSC3_PV_Update SM137.5HSC3 预置值更新:0 = 无更新;1 = 更新预置值HSC3_CV_Update SM137.6HSC3 当前值更新:0 = 无更新;1 = 更新当前值HSC3_Enable SM137.7HSC3 使能:0 = 禁止;1 = 使能HSC4_Status_5SM146.5HSC4 当前计数方向状态:1 = 增计数HSC4_Status_6SM146.6HSC4 当前值等于预置值状态:1 = 相等HSC4_Status_7SM146.7HSC4 当前值大于预置值状态:1 = 大于HSC4_Reset_Level SM147.0HSC4 复位有效电平控制:0 = 高电平有效;1 = 低电平有效HSC4_Rate SM147.2HSC4 计数速率选择:0 = 4x(四倍速);1 = 1xHSC4_Dir SM147.3HSC4 计数方向控制:0 = 减计数;1 = 增计数HSC4_Dir_Update SM147.4HSC4 计数方向更新:0 = 无更新;1 = 更新方向HSC4_PV_Update SM147.5HSC4 预设值更新:0 = 无更新;1 = 更新预置值HSC4_CV_Update SM147.6HSC4 当前值更新:0 = 无更新;1 = 更新当前值HSC4_Enable SM147.7HSC4 使能:0 = 禁止;1 = 使能HSC5_Status_5SM156.5HSC5 当前计数方向状态:1 = 增计数HSC5_Status_6SM156.6HSC5 当前值等于预置值状态:1 = 相等HSC5_Status_7SM156.7HSC5 当前值大于预置值状态:1 = 大于HSC5_Dir SM157.3HSC5 计数方向控制:0 = 减计数;1 = 增计数HSC5_Dir_Update SM157.4HSC5 计数方向更新:0 = 无更新;1 = 更新方向HSC5_PV_Update SM157.5HSC5 预设值更新:0 = 无更新;1 = 更新预置值HSC5_CV_Update SM157.6HSC5 当前值更新:0 = 无更新;1 = 更新当前值HSC5_Enable SM157.7HSC5 使能:0 = 禁止;1 = 使能符号地址注释P1_Stat_Rcv_0SM186.0 1 = 信息接收终止:奇偶校验错误P1_Stat_Rcv_1SM186.1 1 = 信息接收终止:达到最大字符计数P1_Stat_Rcv_2SM186.2 1 = 信息接收终止:定时器到期P1_Stat_Rcv_5SM186.5 1 = 信息接收终止:收到结束字符P1_Stat_Rcv_6SM186.6 1 = 信息接收终止:输入参数错误或缺少起始或结束条件P1_Stat_Rcv_7SM186.7 1 = 信息接收终止:用户禁止命令P1_Ctrl_Rcv_1SM187.10 = 忽略断点状态;1 = 将断点状态用作讯息检测开始P1_Ctrl_Rcv_2SM187.20 = 忽略 SMW192,1 = 如果超过 SMW192 中的定时,终止接收P1_Ctrl_Rcv_3SM187.30 = 定时器是字符间定时器,1 = 定时器是信息间定时器P1_Ctrl_Rcv_4SM187.40 = 忽略 SMW190,1 = 使用 SMW190 中的数据检测空闲条件P1_Ctrl_Rcv_5SM187.50 = 忽略 SMB189,1 = 使用 SMB189 中的数据检测信息结束P1_Ctrl_Rcv_6SM187.60 = 忽略 SMB188,1 = 使用 SMB188 中的数据检测信息开始P1_Ctrl_Rcv_7SM187.70 = 信息接收功能被禁止,1 = 信息接受功能被使能Receive_Char SMB2包含自由端口通信过程中从端口 0 或端口 1 收到的每个字符CPU_ID SMB6CPU 识别(ID)号EM0_ID SMB8模块 0 识别(ID)寄存器EM0_Err SMB9模块 0 错误寄存器EM1_ID SMB10模块 1 识别(ID)寄存器EM1_Err SMB11模块 1 错误寄存器EM2_ID SMB12模块 2 识别(ID)寄存器EM2_Err SMB13模块 2 错误寄存器EM3_ID SMB14模块 3 识别(ID)寄存器EM3_Err SMB15模块 3 错误寄存器EM4_ID SMB16模块 4 识别(ID)寄存器EM4_Err SMB17模块 4 错误寄存器EM5_ID SMB18模块 5 识别(ID)寄存器EM5_Err SMB19模块 5 错误寄存器EM6_ID SMB20模块 6 识别(ID)寄存器EM6_Err SMB21模块 6 错误寄存器Pot0_Value SMB28包含与模拟电位器 0 对应的数值Pot1_Value SMB29包含与模拟电位器 1 对应的数值P0_Config SMB30通信端口 0 设置:奇偶校验、每个字符的数据位数目、波特率和协议符号地址注释Save_to_EEPROM SMB31设置保存参数,以便将 V 存储区中的一个数据保存至永久性存储区(EEPROM)Time_0_Intrvl SMB34定时中断 0 的时间间隔(从 1 至 255,以 1 毫秒为增量)。