第四章应力与应变关系本构方程
- 格式:ppt
- 大小:321.51 KB
- 文档页数:7

材料力学中的应力与应变关系材料力学是研究材料在受力作用下的力学行为和性能的学科,应力与应变关系是其中的核心内容之一。
本文将讨论材料力学中的应力与应变的概念及其数学表示,以及应力与应变之间的线性关系与非线性关系。
一、应力的概念及表示应力是指材料单位面积上的内部力,常用符号σ表示。
根据受力情况的不同,可以分为正应力、切应力和体积应力。
正应力是指与作用力方向垂直的内部力,常用符号σ表示;切应力是指与作用力方向平行的内部力,常用符号τ表示;体积应力是指作用在体积内的内部力,常用符号p表示。
正应力的数学表示为σ = F/A,其中F为作用力的大小,A为受力面积。
切应力的数学表示为τ = F/A,其中F为切力的大小,A为受力面积。
体积应力的数学表示为p = F/V,其中F为体积力的大小,V为受力体积。
二、应变的概念及表示应变是指材料在受力作用下产生的形变程度,常用符号ε表示。
根据变形方式的不同,可以分为线性应变和体积应变。
线性应变是指在受力作用下,材料产生的长度或角度发生变化,常用符号ε表示;体积应变是指在受力作用下,材料产生的体积发生变化,常用符号η表示。
线性应变的数学表示为ε = ΔL/L0,其中ΔL为长度变化量,L0为原始长度。
体积应变的数学表示为η = ΔV/V0,其中ΔV为体积变化量,V0为原始体积。
三、应力与应变的线性关系在一定范围内,应力与应变之间可以表现为线性关系。
根据胡克定律(Hooke's Law),线性弹性材料的应力与应变之间满足σ = Eε,其中E为弹性模量。
弹性模量是材料刚度的度量,表示材料单位应力产生的单位应变。
常见的弹性模量有杨氏模量、剪切模量和泊松比。
杨氏模量的数学表示为E = σ/ε,其中σ为应力,ε为线性应变。
剪切模量的数学表示为G = τ/γ,其中τ为切应力,γ为切应变。
泊松比的数学表示为ν = -εv/εh,其中εv为垂直方向的线性应变,εh为水平方向的线性应变。
我所认识的应力与应变关系经过分析,我们已经得知弹塑性问题中有15个未知量,9个方程,因此它是一个超静定问题,为了求解这一问题必须引入应力应变,它们之间一定存在必然的联系,这种联系就是我们所了解的应力应变关系。
应力应变关系即所谓的本构关系,是物质力学特性的反映,通常用本构方程来描述。
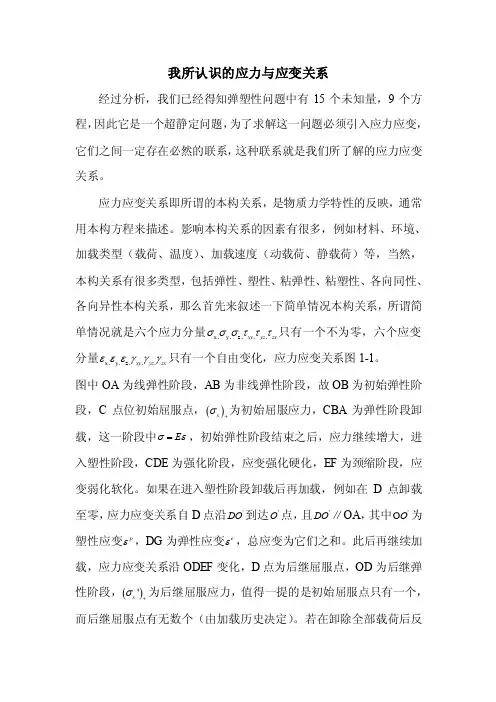
影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量x y xy yz zx σσστττ、、z 、、、只有一个不为零,六个应变分量x y xy yz zx εεεγγγ、、z 、、、只有一个自由变化,应力应变关系图1-1。
图中OA 为线弹性阶段,AB 为非线弹性阶段,故OB 为初始弹性阶段,C 点位初始屈服点,()s σ+为初始屈服应力,CBA 为弹性阶段卸载,这一阶段中E σε=,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE 为强化阶段,应变强化硬化,EF 为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D 点卸载至零,应力应变关系自D 点沿'DO 到达'O 点,且'DO ∥OA ,其中'O O 为塑性应变p ε,DG 为弹性应变e ε,总应变为它们之和。
此后再继续加载,应力应变关系沿ODEF 变化,D 点为后继屈服点,OD 为后继弹性阶段,()'s σ+为后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段'COC ,()()s s σσ+-=,而在强化阶段'DOD ,()()s s σσ+->,称为Bauschinger 效应。
图1-1、应力应变关系图从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。
我所认识的应力与应变的关系机械与动力工程学院我所认识的本构关系可以从三个不同的受力条件下进行分析,第一是在弹性变形下的应力与应变的关系,第二是在屈服条件下的应力与应变的关系,第三是在塑性条件下的应力与应变的关系,而对应力与应变的关系的研究也可以归结为对本构关系的研究。
首先,弹塑性力学分别从静力学和几何学的角度出发,导出了平衡方程的和几何方程,这些方程均与物体的材料性质(物理性质)无关,因而适用于任何连续介质。
但仅仅依靠平衡方程和几何方程来解决实际中的工程问题是不够的。
由于平衡方程仅建立了力学参数(应力分量与外力分量)之间的联系,而几何方程也仅建立了运动学参数(位移分量与应变分量)之间的关系,所以平衡方程与几何方程式两类完全相互独立的方程,他们之间还缺乏必要的联系。
对于所求解的问题来讲,因为您未知量的数目多于任何一类方程的个数,所以无法利用这两类方程求的全部未知量。
平衡方程:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂⎪⎪⎭⎫ ⎝⎛∂∂=+∂∂+∂∂+∂∂222222000t w Z z y x t v Y z y x t u X z y x z zy zx yz y yx xz xy x ρσττρτστρττσ (1) 几何方程:⎪⎪⎪⎭⎪⎪⎪⎬⎫∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=∂∂+∂∂=∂∂=x w z u z w z v y w y v y u x v x u zx z yz y xy x γεγεγε (2) 为了求解具体的力学问题,还必须引进一些关系式,这些关系式即所谓的本构关系。
本构关系反映可变形体材料的固有特此那个,故也称为物理关系,它实际上是一组联系力学参数和运动学参数的方程式,即所谓的本构方程。
本构方程实际上就是一组反映可变形体材料应力和应变之间关系的方程。
在单向应力状态下,理想弹性材料的应力和应变之间的关系极其简单。
第四章本构方程在前面的章节中,已经建立了变形体的平衡微分方程和几何方程,分别是从静力学方面和从几何学方面考察了变形体的受力和变形。
但是只有这些方程还不足以解决变形体内的应力和变形问题。
对于变形体,未知变量包括6个应力分量,6个应变分量和3个位移分量,一共有15个未知函数,而平衡方程和几何方程一共是9个,未知函数的个数多于方程数。
因此还必须研究物体的物理性质,即应力与应变之间的关系。
通常称这种关系为变形体的本构方程,或称为物性方程。
塑性本构包括三个方面:1、屈服条件,2、流动法则,3、硬化关系;其中屈服条件:判断何时达到屈服,流动法则:屈服后塑性应变增量的方向,也即各分量的比值,硬化规律:决定给定的应力增量引起的塑性应变增量大小。
以上构成塑性本构关系。
4.1弹性应变能函数变形固体的平衡问题不仅需要运动微分方程、应变—位移方程(即变形几何方程)还需要将应变分量和应力张量分量联系起来,方能给定物体的材料抵抗各种形式变形的规律。
该规律的理论解释需要对分子间力的本质有深入的认识,该分子力力图使固体粒子间保持—定的距离,也就是需要对固体中应力分量和应变分量有深入的认识。
这种作用机理在非常接近稳定状态的气体中己弄清楚,但对于弹性体情况,目前科学技术发展水平还不能解决这一难题。
如要通过实验探求物体内部的应力和应变的关系,则总是从一些量的测量来推理得到,在一般情况下,这些量并非应力或应变的分量(例如平均应变、体积压缩、物体表面一线元的伸长等等).因此,在现时应力与应变关系主要是通过直接实验建立。
然而该关系中的某些固有的一般特性可以在理沦上加以说朋,如能量守恒定律为应力-应变关系的理论研究提供了基础。
1.1应变能密度假设变形的过程是绝热的,也就是在变形过程中系统没有热的损失,而且假设物体中任意无穷小单元改变其体积和形状所消耗的功与其从未变形状态到最终变形状态的转换方式无关。
这个条件是弹性的另一种定义。
换句话说,就是假设物体粒子互相作用过程中的耗散(非保守)力的作用与保守力的作用相比是可以忽略的。