应力与应变间的关系
- 格式:ppt
- 大小:781.00 KB
- 文档页数:10
流体力学中应力应变关系
流体力学是研究流体运动和变形的学科,应力和应变是流体力学中关键的概念。
应力是流体内部各点受到的力,应变是流体形变程度的度量。
在流体力学中,应力和应变之间存在一定的关系,通常用应力张量和应变张量来描述。
应力张量包含了流体各点在各个方向上受到的应力大小和方向信息,应变张量则包含了流体在各个方向上的形变程度。
在牛顿流体中,应力张量和应变张量之间的关系是线性的,即应力与应变成比例关系,比例系数被称为粘度。
而在非牛顿流体中,应力与应变的关系则更加复杂。
流体力学中的应力应变关系是研究流体运动和变形的基础,对于工程应用和科学研究都具有重要意义。
在许多工程领域,如航空、水利、化工等,流体力学的应用广泛,深入研究应力应变关系可以为工程设计和实际应用提供更加准确和可靠的理论基础。
- 1 -。

我所认识的应力应变关系应力应变都是物体受到外界载荷产生的响应。
物体由于受到外界载荷后,在物体内部各部分之间要产生互相之间的力的作用,由于受到力的作用就会产生相应的变形;或者由于变形引起相应的力的作用。
则一定材料的物体其产生的应力和应变也必然存在一定的关系。
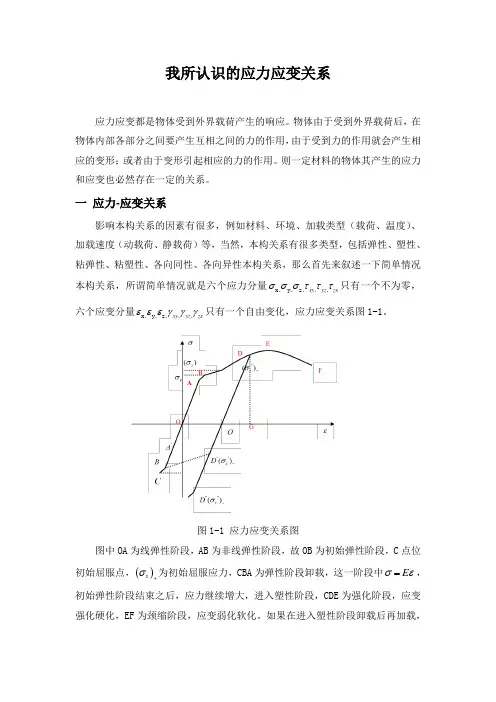
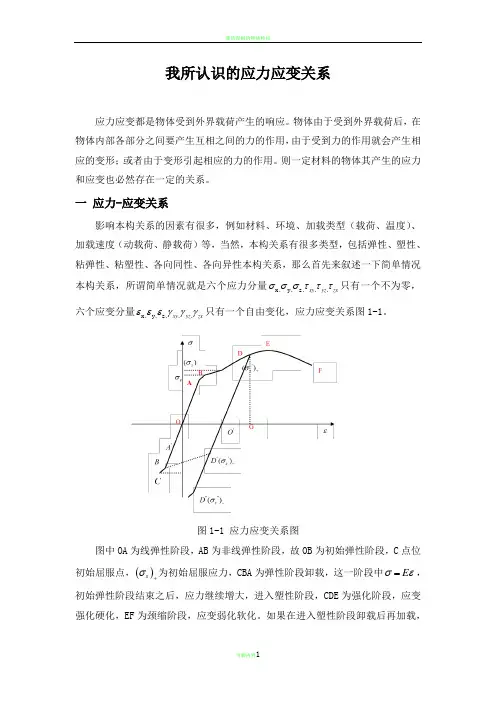
一 应力-应变关系影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量x y xy yz zx σσστττ、、z 、、、只有一个不为零,六个应变分量x y xy yz zx εεεγγγ、、z 、、、只有一个自由变化,应力应变关系图1-1。
图1-1 应力应变关系图图中OA 为线弹性阶段,AB 为非线弹性阶段,故OB 为初始弹性阶段,C 点位初始屈服点,()s σ+为初始屈服应力,CBA 为弹性阶段卸载,这一阶段中E σε=,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE 为强化阶段,应变强化硬化,EF 为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D 点卸载至零,应力应变关系自D 点沿'DO 到达'O 点,且'DO ∥OA ,其中'O O 为塑性应变p ε,DG 为弹性应变e ε,总应变为它们之和。
此后再继续加载,应力应变关系沿ODEF 变化,D 点为后继屈服点,OD 为后继弹性阶段,()'s σ+为后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段'COC ,()()s s σσ+-=,而在强化阶段'DOD ,()()s s σσ+->,称为Bauschinger 效应。
从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。

弹性力学中的应力与应变关系弹性力学是力学的一个重要分支,研究物体在外力的作用下产生的形变与应力的关系。
在弹性力学理论中,应力与应变关系是最为核心的概念之一。
本文将探讨弹性力学中的应力与应变关系的基本原理,并从不同角度对其进行分析。
一、基本概念在弹性力学中,应力是描述物体内部单位面积受力情况的物理量。
它可以分为正应力和剪应力。
正应力表示物体在垂直于某一平面上的受力情况,剪应力表示物体在平行于某一平面上的受力情况。
应力的大小一般采用希腊字母σ表示。
应变是描述物体形变情况的物理量。
它可以分为线性应变和体积应变。
线性应变表示物体中某一方向上的长度相对变化,体积应变表示物体在各个方向上的体积变化。
应变的大小可以用希腊字母ε表示。
二、胡克定律胡克定律是描述弹性体材料中应力与应变关系最基本的定律。
其数学表达式为σ = Eε,即应力等于弹性模量与应变之积。
其中,弹性模量E是描述物体对应变的抵抗能力的物理量。
根据胡克定律,应力与应变之间的关系是线性的,即若应变增大,则应力也会相应增大。
胡克定律适用范围有限,对于非线性应力-应变关系的材料,需要采用其他力学模型进行描述。
例如,当外力作用超出一定范围时,弹性体会发生塑性变形,此时应力和应变之间的关系就无法再用胡克定律来描述。
三、材料力学模型由于胡克定律的局限性,研究者们提出了各种各样的材料力学模型来描述应力与应变之间的关系。
其中,最常用的有线性弹性模型、非线性弹性模型和本构模型。
线性弹性模型是胡克定律的拓展,它适用于应力与应变关系呈线性关系的情况。
在这种模型中,应力与应变之间的关系是单一的、唯一的。
当外力作用停止后,物体能够完全恢复到初始状态。
非线性弹性模型适用于应力与应变关系不再呈线性关系的情况。
它可以更好地描述材料的实际变形情况。
在这种模型中,应力与应变之间的关系可以是非线性的、曲线状的。
本构模型是一种综合考虑多种因素的力学模型,它可以更全面地描述材料的应力与应变关系。
我所认识的应力与应变关系经过分析,我们已经得知弹塑性问题中有15个未知量,9个方程,因此它是一个超静定问题,为了求解这一问题必须引入应力应变,它们之间一定存在必然的联系,这种联系就是我们所了解的应力应变关系。
应力应变关系即所谓的本构关系,是物质力学特性的反映,通常用本构方程来描述。
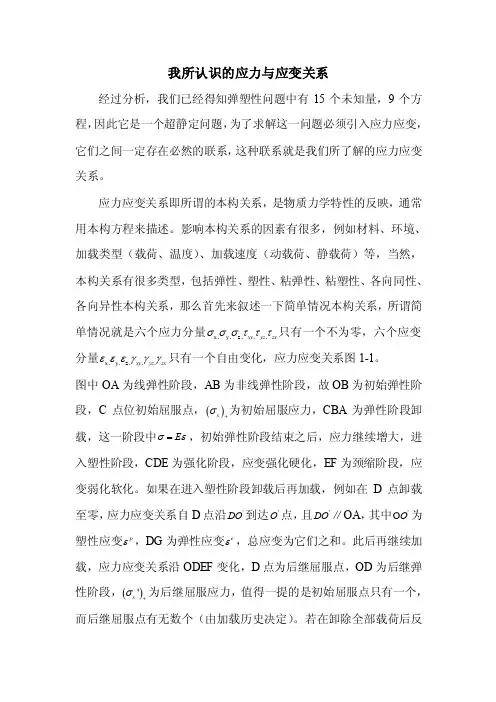
影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量x y xy yz zx σσστττ、、z 、、、只有一个不为零,六个应变分量x y xy yz zx εεεγγγ、、z 、、、只有一个自由变化,应力应变关系图1-1。
图中OA 为线弹性阶段,AB 为非线弹性阶段,故OB 为初始弹性阶段,C 点位初始屈服点,()s σ+为初始屈服应力,CBA 为弹性阶段卸载,这一阶段中E σε=,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE 为强化阶段,应变强化硬化,EF 为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D 点卸载至零,应力应变关系自D 点沿'DO 到达'O 点,且'DO ∥OA ,其中'O O 为塑性应变p ε,DG 为弹性应变e ε,总应变为它们之和。
此后再继续加载,应力应变关系沿ODEF 变化,D 点为后继屈服点,OD 为后继弹性阶段,()'s σ+为后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段'COC ,()()s s σσ+-=,而在强化阶段'DOD ,()()s s σσ+->,称为Bauschinger 效应。
图1-1、应力应变关系图从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。
我所认识的应力应变关系应力应变都是物体受到外界载荷产生的响应。
物体由于受到外界载荷后,在物体内部各部分之间要产生互相之间的力的作用,由于受到力的作用就会产生相应的变形;或者由于变形引起相应的力的作用。
则一定材料的物体其产生的应力和应变也必然存在一定的关系。
一 应力-应变关系影响本构关系的因素有很多,例如材料、环境、加载类型(载荷、温度)、加载速度(动载荷、静载荷)等,当然,本构关系有很多类型,包括弹性、塑性、粘弹性、粘塑性、各向同性、各向异性本构关系,那么首先来叙述一下简单情况本构关系,所谓简单情况就是六个应力分量x y xy yz zx σσστττ、、z 、、、只有一个不为零,六个应变分量x y xy yz zx εεεγγγ、、z 、、、只有一个自由变化,应力应变关系图1-1。
图1-1 应力应变关系图图中OA 为线弹性阶段,AB 为非线弹性阶段,故OB 为初始弹性阶段,C 点位初始屈服点,()s σ+为初始屈服应力,CBA 为弹性阶段卸载,这一阶段中E σε=,初始弹性阶段结束之后,应力继续增大,进入塑性阶段,CDE 为强化阶段,应变强化硬化,EF 为颈缩阶段,应变弱化软化。
如果在进入塑性阶段卸载后再加载,例如在D 点卸载至零,应力应变关系自D 点沿'DO 到达'O 点,且'DO ∥OA ,其中'O O 为塑性应变p ε,DG 为弹性应变e ε,总应变为它们之和。
此后再继续加载,应力应变关系沿ODEF 变化,D 点为后继屈服点,OD 为后继弹性阶段,()'s σ+为后继屈服应力,值得一提的是初始屈服点只有一个,而后继屈服点有无数个(由加载历史决定)。
若在卸除全部载荷后反向加载,弹性阶段'COC ,()()s s σσ+-=,而在强化阶段'DOD ,()()s s σσ+->,称为Bauschinger 效应。
从上述分析得出材料弹塑性行为有一定的特殊性,主要表现在:弹性应力应变关系是线性,且是单值对应关系,而塑性应力应变关系是非线性的非单值对应。
应力和应变的关系
应力与应变之间的关系可以用Hooke定律来描述:若一个物体由于外力的作用作了拉伸或挤压变形,那么它的应力与其变形的大小成正比。
一般地说,应力与应变是成正比的,这意味着物体变形的越大,其施加的应力就越大。
另外,应力也与物体材料的弹性模量有关,即物体受外力作用而变形后,产生的应力越大,则物体受外力作用而变形时,所需要的外力就越大。
因此,应力和应变之间的关系也可以通过物体的弹性模量来描述。
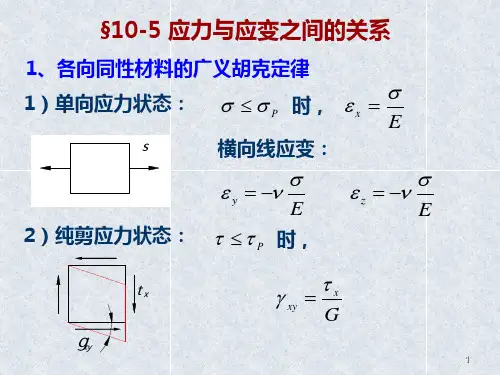
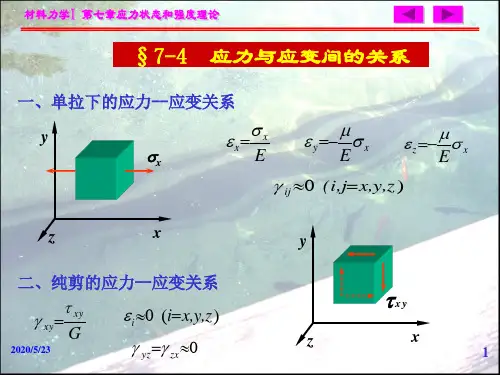
我所认识的应力和应变之间的关系在单向应力状态下,理想弹性材料的应力和应变之间的关系是满足胡克定律的一一对应的关系。
在三维应力状态下描述一点处的应力状态需要9个分量,相应的应变状态也要用9个应变分量来表示。
对于一个具体的理想弹性体来讲,如果在三维应力状态下,应力与应变之间仍然有线性一一对应关系存在,则称这类弹性体为线性弹性体。
所谓各向弹性体,从力学意义上讲,就是弹性体内的每一点沿各个方向的力学性质都完全相同的。
这类线性弹性体独立的唐兴常数只有两个。
各向同性体本构关系特点:1.主应力与主应变方向重合。
2.体积应力与体积应变成比例。
3.应力强度与应变强度成比例。
4.应力偏量与应变偏量成比例。
工程应用中,常把各向同性弹性体的本构方程写下成11()11()11()x y z xy xy y x z yz yz z y x xz xz E G E G E G εσμσσγτεσμσσγτεσμσσγτ⎧⎡⎤=-+=⎣⎦⎪⎪⎪⎡⎤=-+=⎨⎣⎦⎪⎪⎡⎤=-+=⎪⎣⎦⎩,式中分别为弹性模量、泊松比和剪切模量。
在E G μ、、这三个参数之间,实际上独立的常量只有两个,它们之间存在关系为()21E G μ=+。
屈服条件:弹性和塑性的最主要区别在于变形是可以恢复。
习惯上,根据破坏时变形的大小把工程材料分为脆性材料和塑性材料两类。
对于加载过程如图1OA: 比例阶段;线性弹性阶段AB: 非弹性变形阶段 BC : 初始屈服阶段 s σσ≤ CDE :强化阶段;应变强化硬化阶段EF : 颈缩阶段;应变弱化,软化阶段s σσ≥ C 点为初始屈服点具有唯一性。
在应力超过屈服应力后,如果在曲线上任意一点D 处卸载,应力和应变之间将不再遵循原有的加载曲线规律,而是沿一条接近平行于OA 的直线DO ’变化,直到应力下降为零,这时应变并不为零,即有塑性应变产生。
如果用OD ’表示总应变ε,O ’D ’表示可以恢复的弹性应变eε,OO ’表示不能恢复的塑性应变p ε,则有e p εεε=+,即总应变等于弹性应变加上塑性应变。
第四章应力和应变关系一. 内容介绍前两章分别从静力学和运动学的角度推导了静力平衡方程,几何方程和变形协调方程。
由于弹性体的静力平衡和几何变形是通过具体物体的材料性质相联系的,因此,必须建立了材料的应力和应变的内在联系。
应力和应变是相辅相成的,有应力就有应变;反之,有应变则必有应力。
对于每一种材料,在一定的温度下,应力和应变之间有着完全确定的关系。
这是材料的固有特性,因此称为物理方程或者本构关系。
对于复杂应力状态,应力应变关系的实验测试是有困难的,因此本章首先通过能量法讨论本构关系的一般形式。
分别讨论广义胡克定理;具有一个和两个弹性对称面的本构关系一般表达式;各向同性材料的本构关系等。
本章的任务就是建立弹性变形阶段的应力应变关系。
二. 重点1. 应变能函数和格林公式;2. 广义胡克定律的一般表达式;3. 具有一个和两个弹性对称面的本构关系;4. 各向同性材料的本构关系;3. 材料的弹性常数。
知识点应变能原理应力应变关系的一般表达式完全各向异性弹性体正交各向异性弹性体本构关系弹性常数各向同性弹性体应变能格林公式广义胡克定理一个弹性对称面的弹性体本构关系各向同性弹性体的应力和应变关系应变表示的各向同性本构关系§4.1 弹性体的应变能原理学习思路:弹性体在外力作用下产生变形,因此外力在变形过程中作功。
同时,弹性体内部的能量也要相应的发生变化。
借助于能量关系,可以使得弹性力学问题的求解方法和思路简化,因此能量原理是一个有效的分析工具。
本节根据热力学概念推导弹性体的应变能函数表达式,并且建立应变能函数表达的材料本构方程。
根据能量关系,容易得到由于变形而存储于物体内的单位体积的弹性势能,即应变能函数。
探讨应变能的全微分,可以得到格林公式,格林公式是以能量形式表达的本构关系。
如果材料的应力应变关系是线性弹性的,则单位体积的应变能必为应变分量的齐二次函数。
因此由齐次函数的欧拉定理,可以得到用应变或者应力表示的应变能函数。
试说明弹性力学中应力,应变,位移三者之间的关系.
应力和应变之间的关系是可以用弹性力学的材料模型来表示的,它们之间的关系可表示为受力的物体会产生一个应变,这个应变是受力强度和材料的模量来决定的,当应力变化时,物体产生的应变也会变化,关系可以用弹性力学方程来表示:应力= 应变× 模量。
另外,应力和位移之间也有关系,当施加力时,物体会产生一个位移,而位移又是一个受力强度和材料模量共同决定的参数,可用弹性力学方程来表示:应力 = 位移× 模量。
另外,弹性模量有时也称为弹性常数,它可用来衡量材料的弹性程度,以及材料在受力时所受到的影响,它是决定应力和应变、应力和位移关系的一个基本参数,物理现象中可以用来描述物体变形的程度,将应力与物体变形程度结合起来可以确定应力对物体变形的影响。
同时,这种参数也可以用来描述弹性体在受力作用下所产生的变形量。
由于弹性模量的作用,物体对于受力时大小的变形量可以用模量值来确定:弹性模量越大,物体几乎不变形,弹性模量越小,则物体的变形量越大;另外,弹性模量也能够描述物体在受力作用下所产生的力和位移关系,弹性模量越大,物体受到相同力量作用时,其所受到的变形量和位移量也会更小,反之,弹性模量越小,受到相同力量作用时,其所受到的变形量和位移量也会更大。
因此,弹性模量可以决定物体受力后的变形情况,以及材料的弹性程度。