故相似, 所以图形 bce 称之为图形BCE的速度影像。
(2)加速度求解步骤:
★ 求aC ①列矢量方程式
aC aB aCB aB aCnB aCt B
大小:?
√ 22lBC ?
方向:∥xx
⊥AB C→B ⊥AB 加速度多边形
②确定加速度比例尺 μa((m/s2)/mm) 极点 ③作图求解未知量:
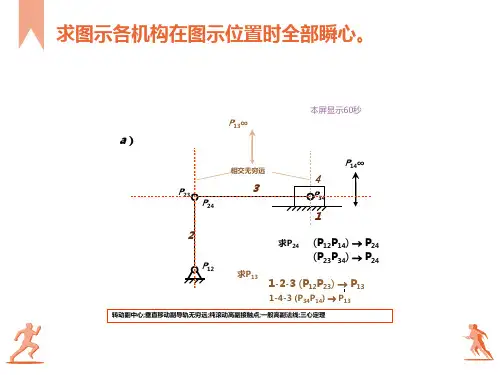
◆通过运动副直接相联两构件的瞬心位置确定
转动副联接两构件的 瞬心在转动副中心。
若为纯滚动, 接 触点即为瞬心;
移动副联接两构件 的瞬心在垂直于导 路方向的无究远处。
若既有滚动又有滑 动, 则瞬心在高副接 触点处的公法线上。
三、机构中瞬心位置的确定 (续) ◆ 不直接相联两构件的瞬心位置确定 P13
解:1. 画机构运动简图
A
2 B
ω2
D ω4 α4
ω3 a3 3 C
x
5E (E5,E6) 6 ω6 x
a6
2. 速度分析:
(1) 求vB:
(2) 求vC: 大 小
vB l AB 2
vCvBvCB
?√?
2 B
A
动件AB的运动规律和各构件 尺寸。求:
①图示位置连杆BC的角速度
和其上各点速度。
②连杆BC的角加速度和其上 C点加速度。
解题分析:原动件AB的运动规 律已知,则连杆BC上的B点速度 和加速度是已知的,于是可以用
同一构件两点间的运动关系求解。
(1) 速度解题步骤:
★求VC
①由运动合成原理列矢量方程式
不便;速度瞬心法只限于对速度进行分析, 不能 分析机构的加速度;精度不高。
3-3 机构运动分析的矢量方程图解法
一、矢量方程图解法的基本原理和作法