自动控制原理复习资料——卢京潮版第二章
- 格式:docx
- 大小:494.26 KB
- 文档页数:27

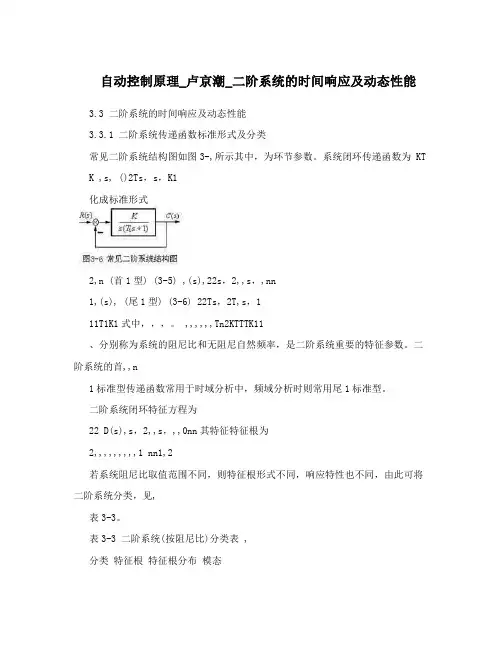
自动控制原理_卢京潮_二阶系统的时间响应及动态性能3.3 二阶系统的时间响应及动态性能3.3.1 二阶系统传递函数标准形式及分类常见二阶系统结构图如图3-,所示其中,为环节参数。
系统闭环传递函数为 KT K ,s, ()2Ts,s,K1化成标准形式2,n (首1型) (3-5) ,(s),22s,2,,s,,nn1,(s), (尾1型) (3-6) 22Ts,2T,s,111T1K1式中,,,。
,,,,,,Tn2KTTTK11、分别称为系统的阻尼比和无阻尼自然频率,是二阶系统重要的特征参数。
二阶系统的首,,n1标准型传递函数常用于时域分析中,频域分析时则常用尾1标准型。
二阶系统闭环特征方程为22 D(s),s,2,,s,,,0nn其特征特征根为2,,,,,,,,,1 nn1,2若系统阻尼比取值范围不同,则特征根形式不同,响应特性也不同,由此可将二阶系统分类,见,表3-3。
表3-3 二阶系统(按阻尼比)分类表 ,分类特征根特征根分布模态,t1e ,,12,,,,,,,,,1 nn 1,2,t2e过阻尼,,tn ,,1e,,,, 1,2n,,tnte临界阻尼,,t,2n,,esin1,t0,,,1 n2,,,,,,j,1,, nn1,2t,,,2necos1,,,t欠阻尼 n57,sint ,,0n ,,,j, 1,2ncos,tn零阻尼数学上,线性微分方程的解由特解和齐次微分方程的通解组成。
通解由微分方程的特征根决定,,t,t,tn12代表自由响应运动。
如果微分方程的特征根是,,且无重根,则把函数,,eee,,,?,?,12n称为该微分方程所描述运动的模态,也叫振型。
,t2,t,如果特征根中有多重根,则模态是具有,形式的函数。
tete,?(,,j,)t(,,j,)t如果特征根中有共轭复根,则其共轭复模态与可写成实函数模态ee,,,,j,,t,t与。
esin,tecos,t每一种模态可以看成是线性系统自由响应最基本的运动形态,线性系统自由响应则是其相应模态的线性组合。
第二章 过程装备控制基础本章内容:简单过程控制系统的设计复杂控制系统的结构、特点及应用。
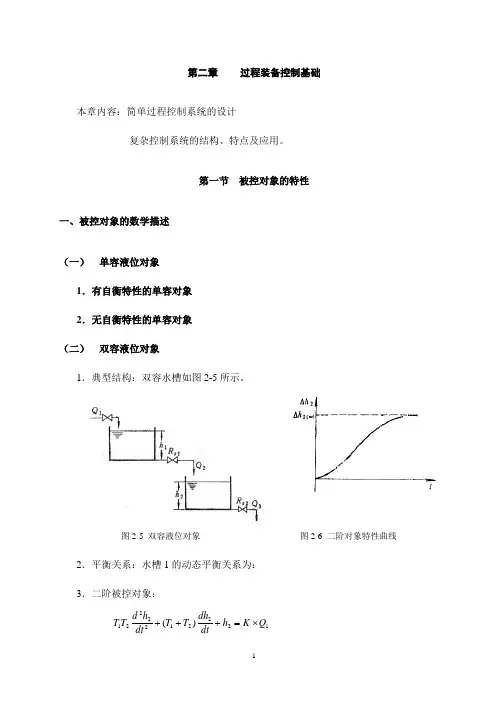
第一节 被控对象的特性一、被控对象的数学描述(一) 单容液位对象1.有自衡特性的单容对象2.无自衡特性的单容对象(二) 双容液位对象1.典型结构:双容水槽如图2-5所示。
图2-5 双容液位对象 图2-6 二阶对象特性曲线2.平衡关系:水槽1的动态平衡关系为:3.二阶被控对象:1222122221)(Q K h dt dh T T dth d T T ⨯=+++式(2-18)就是描述图2-5所示双容水槽被控对象的二阶微分方程式。
称二阶被控对象。
二、被控对象的特性参数(一)放大系数K(又称静态增益)(二)时间常数T(三)滞后时间τ(1).传递滞后τ0(或纯滞后):(2).容量滞后τc可知τ=τ0+τc。
三、对象特性的实验测定对象特性的求取方法通常有两种:1.数学方法2.实验测定法(一)响应曲线法:(二)脉冲响应法第二节单回路控制系统定义:(又称简单控制系统),是指由一个被控对象、一个检测元件及变送器、一个调节器和一个执行器所构成的闭合系统。
一、单回路控制系统的设计设计步骤:1.了解被控对象2.了解被控对象的动静态特性及工艺过程、设备等3.确定控制方案4.整定调节器的参数(一)被控变量的选择(二)操纵变量的选择(三)检测变送环节的影响(四)执行器的影响二、调节器的调节规律1.概念调节器的输出信号随输入信号变化的规律。
2.类型位式、比例、积分、微分。
(一)位式调节规律1.双位调节2.具有中间区的双位调节3.其他 三位或更多位的调节。
(二)比例调节规律(P )1.比例放大倍数(K )2.比例度δ3.比例度对过渡过程的影响(如图2-24所示)4.调节作用比例调节能较为迅速地克服干扰的影响,使系统很快地稳定下来。
通常适用于干扰少扰动幅度小、符合变化不大、滞后较小或者控制精度要求不高的场合。
(三)比例积分调节规律(PI )1.积分调节规律(I )(1)概念:调节器输出信号的变化量与输入偏差的积分成正比⎰⎰==∆t I t I dt t e T dt t e K t u 00)(1)()(式中:K I 为积分速度,T I 为积分时间。
自动控制原理复习资料——卢京潮版第二章第二章:控制系统的数学模型§2.1 引言·系统数学模型-描述系统输入、输出及系统内部变量之间关系的数学表达式。
·建模方法⎩⎨⎧实验法(辩识法)机理分析法·本章所讲的模型形式⎩⎨⎧复域:传递函数时域:微分方程§2.2控制系统时域数学模型1、 线性元部件、系统微分方程的建立 (1)L-R-C 网络 C r u R i dtdiL u +⋅+⋅=↓ci C u =⋅c c c u u C R u C L +'⋅⋅+''⋅⋅=11cc c r R u u u u LLC LC'''∴++= ── 2阶线性定常微分方程 (2)弹簧—阻尼器机械位移系统 分析A 、B 点受力情况02B0A AA i 1x k )x xf()x x (k =-=-∴ 由 A 1A i 1x k )x x (k =- 解出012i A x k k x x -=代入B 等式:020012i x k )x x k k xf(=-- 02012i x k x )k k 1f(xf ++=⋅ 得:()i 1021021x fk x k k xk k f =++ ── 一阶线性定常微分方程 (3)电枢控制式直流电动机 电枢回路:b a E i R u +⋅=┈克希霍夫 电枢及电势:m e b C E ω⋅=┈楞次 电磁力矩:i C M m m ⋅=┈安培力矩方程:m m m m m M f J =+⋅ωω┈牛顿变量关系:m mb a M E i u ω----消去中间变量有:a m m m m u k T =+ωω [][]⎪⎩⎪⎨⎧+⋅=+⋅=传递函数时间函数 C C f R C k C C f R RJ T m e m mm m e m m m(4)X-Y 记录仪(不加内电路)⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧⋅=⋅===+∆⋅==∆ll 4p 3m2am m m m 1a p r k u :k :k :u k T :u k u :u -u u :电桥电路绳轮减速器电动机放大器比较点θθθθθ a m rp u u u u l θθ∆----------- 消去中间变量得:a m 321m 4321m u k k k k k k k k k T =++l l l ─二阶线性定常微分方程即:a mm 321m m 4321m u T kk k k l T k k k k k l T 1l =++2、 线性系统特性──满足齐次性、可加性 ● 线性系统便于分析研究。
第一章自动控制的一般概念习题及答案1-1 根据题1-15图所示的电动机速度控制系统工作原理图,完成:(1)将a,b与c,d用线连接成负反馈状态;(2)画出系统方框图。
解(1)负反馈连接方式为:a↔d,b↔c;(2)系统方框图如图解1-1所示。
1-2 题1-16图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-16仓库大门自动开闭控制系统1解当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如图解1-2所示。
1-3 图1-17为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
图1-17 炉温自动控制系统原理图解加热炉采用电加热方式运行,加热器所产生的热量与调压器电压u c的平方成正比,u c 增高,炉温就上升,u c的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压u f。
u f作为系统的反馈电压与给定电压u r进行比较,得出偏差电压u e,经电压放大器、功率放大器放大成u a后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T°C,热电偶的输出电压u f正好等于给定电压u r。
此时,u e=u r−u f=0,故u1=u a=0,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使u c保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T°C由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下2的控制过程:控制的结果是使炉膛温度回升,直至T°C的实际值等于期望值为止。
《自动控制原理》课程复习要点课程名称:《自动控制原理》适用专业:电气工程及其自动化辅导教材:《自动控制原理》卢京潮主编清华大学出版社复习要点:第一章、绪论(1)自动控制的一般概念及自动控制理论的发展概况。
(2)开环控制、闭环(反馈)控制、复合控制的特点与应用;自动控制系统的基本组成、术语;自动控制系统的定性分析方法。
(3)自动控制系统的分类及对自动控制系统的基本要求。
第二章、控制系统的数学模型(1)建立控制系统数学模型的主要方法、经典控制理论中数学模型的主要形式及特点。
(2)控制系统的微分方程式描述。
(3)传递函数的定义、性质、求法及典型环节的传递函数。
(4)控制系统结构图(方框图)的建立、基本联接形式、等效变换和简化;梅逊公式的应用。
第三章、线性系统的时域分析法(1)典型输入信号和自动控制系统的时域性能指标。
(2)一阶系统的典型数学模型,典型响应、性能指标及其与特征参数的关系。
(3)二阶系统的典型数学模型,按阻尼比分类的典型响应、性能指标及其与特征参数的关系;改善系统动态性能的方法。
(4)线性定常系统稳定性的概念;线性定常系统稳定的充要条件;劳斯判据的应用。
(5)误差信号及稳态误差的定义;稳态误差的计算;系统的型别、静态和动态误差系数;减小系统稳态误差的方法。
第四章、线性系统的根轨迹法(1)根轨迹、根轨迹方程的定义。
(2)绘制1800根轨迹的基本规则。
(3)用根轨迹法分析控制系统的性能。
第五章、线性系统的的频域分析法(1)频率特性的概念、定义及求法;频率特性的图示方法。
(2)典型环节和系统的开环频率特性图的绘制。
(3)Nyquist稳定判据。
(4)控制系统的稳定裕度。
第六章、线性统的校正方法(1)控制系统校正的基本概念,校正的形式,基本控制规律。
(2)超前、迟后、迟后—超前校正装置的作用、对应的校正网络、传递函数及其特性。
(3)频率特性法在系统串联校正中的应用。
教学方式与考核方式:教学方式:面授辅导考核方式:考勤、作业和开卷考试练习题第一章1-1 1-2 1-8第二章2-1 2-2 2-11 2-13 2-17 2-20 第三章3-10 3-15 3-16 3-23 3-37第四章4-2 4-11 4-12第五章5-6 5-9 5-13 5-15 5-20。
第二章:控制系统的数学模型§ 引言·系统数学模型-描述系统输入、输出及系统内部变量之间关系的数学表达式。
·建模方法⎩⎨⎧实验法(辩识法)机理分析法·本章所讲的模型形式⎩⎨⎧复域:传递函数时域:微分方程§控制系统时域数学模型1、 线性元部件、系统微分方程的建立 (1)L-R-C 网络11cc c r Ru u u u LLC LC'''∴++= ── 2阶线性定常微分方程 (2)弹簧—阻尼器机械位移系统 分析A 、B 点受力情况 由 A 1A i 1x k )x x (k =- 解出012i A x k k x x -= 代入B 等式:020012i x k )x x k k x f(=--&&& 得:()i 1021021x fk x k k x k k f &&=++ ── 一阶线性定常微分方程(3)电枢控制式直流电动机 电枢回路:b a E i R u +⋅=┈克希霍夫 电枢及电势:m e b C E ω⋅=┈楞次 电磁力矩:i C M m m ⋅=┈安培力矩方程:m m m m m M f J =+⋅ωω& ┈牛顿变量关系:m mb a M E i u ω----消去中间变量有:(4)X-Y 记录仪(不加内电路)消去中间变量得:a m 321m 4321m u k k k k k k k k k T =++l l l &&&─二阶线性定常微分方程即:a mm 321m m 4321m u T k k k k l T k k k k k l T 1l =++&&&2、 线性系统特性──满足齐次性、可加性 ● 线性系统便于分析研究。
● 在实际工程问题中,应尽量将问题化到线性系统范围内研究。
● 非线性元部件微分方程的线性化。
例:某元件输入输出关系如下,导出在工作点0α处的线性化增量方程解:在0αα=处线性化展开,只取线性项: 令 ()()0y -y y αα=∆ 得 αα∆⋅-=∆00sin E y 3、 用拉氏变换解微分方程 a u l l l 222=++&&& (初条件为0)复习拉普拉斯变换的有关内容1 复数有关概念 (1)复数、复函数 复数 ωσj s += 复函数 ()y x jF F s F += 例:()ωσj 22s s F ++=+= (2)复数模、相角 (3)复数的共轭(4)解析:若F(s)在s 点的各阶导数都存在,称F(s)在s 点解析。
2 拉氏变换定义3 几种常见函数的拉氏变换 1. 单位阶跃:()⎩⎨⎧≥<=0 t 10t 0t 1 2. 指数函数:⎩⎨⎧≥<=0t e 0 t 0)t (f at3. 正弦函数:⎩⎨⎧≥<=0t t sin 0 t0)t (f ω4 拉氏变换的几个重要定理(1)线性性质: [])s (bF )s (aF )t (bf )t (af L 2121+=+ (2)微分定理: ()[]()()0f s F s t f L -⋅='()()()()()()()()()n n-2n 1n n-1n-2 L f t s F s s f 0s f 0sf 0f 0-⎡⎤'=-----⎣⎦L 进一步: 零初始条件下有:()()[]()s F s t f L n n ⋅= ● 例1:求()[]t L δ ● 例2:求[]t cos L ω 解:[]2222s ss s 1t n si L 1t cos ωωωωωωω+=+⋅⋅='=Θ(3)积分定理:()[]()()()0f s1s F s1dt t f L 1-+⋅=⎰ (证略) 零初始条件下有:()[]()s F s1dt t f L ⋅=⎰ 进一步有: ● 例3:求L[t]=? 解:()dt t 1t ⎰=Θ● 例4:求⎥⎦⎤⎢⎣⎡2t L 2解:⎰=tdt 2t 2Θ(4)位移定理实位移定理:()[]()s F e -t f L s ⋅=-ττ● 例5:()()s F0 t 01 t 0 10 t 0t f 求⎪⎩⎪⎨⎧><<<= 解:)1t (1)t (1)t (f --=虚位移定理:()[]()a -s F t f e L at =⋅ (证略) ● 例6:求[]at e L ● 例7:[]()223s s 223t -53s 3s 5s s cos5t e L +++=+=⋅+→● 例8:⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡---)15t (5cos e L )35t (cos e L 2t2t ππ (5)终值定理(极限确实存在时) 证明:由微分定理()()()0f s sF dt e t f st 0-='-∞⎰取极限:()()()0f s sF lim dt e t f lim 0s st 00s -='→-∞→⎰∴有:()() s sF lim f 0s →=∞证毕● 例9:()()()b s a s s 1s F ++=求()f ∞● 例10:()0s s lim t sin f 220s t =+≠=∞→∞→ωωω 拉氏变换附加作业 一. 已知f(t),求F(s)=? 二.已知F(s),求f(t)=? 5.拉氏反变换 (1) 反变换公式:⎰∞+∞-=j j stds e ).s (F j21)t (f σσπ (2) 查表法——分解部分分式(留数法,待定系数法,试凑法) 微分方程一般形式:)s (F 的一般表达式为:[]r b r b r b r b C C a C a C m 1-m )1-m (1)m (01-n )1-n (1)n (+'+++=+'+++ΛΛ来自:(I )其中分母多项式可以分解因式为:)p s ()p s )(p s ()s (A n 21---=Λ (II))s (A p i 为的根(特征根),分两种情形讨论:I :0)s (A =无重根时:(依代数定理可以把)s (F 表示为:) 即:若i c 可以定出来,则可得解:而i c 计算公式: )s (F ).p s (lim c i p s i i-=→(Ⅲ)ip s 'i )s (A )s (B c ==(Ⅲ′)(说明(Ⅲ)的原理,推导(Ⅲ′) ) ● 例2:34s s 2s )s (F 2+++=求?)t (f =解:3s c1s c 3)1)(s (s 2s )s (F 21+++=+++=● 例3:34s s 55s s )s (F 22++++= ,求?)t (f =解:不是真分式,必须先分解:(可以用长除法) ● 例4:j 1s c j -1s c j)1j)(s -1(s 3s 22s s 3s )s (F 212++++=++++=+++=解法一:[]jt-jt t e )j 2(e )j 2(e 2j1--+=- (t cos j 2e e ,t sin j 2e e jt jt jt jt =+=---Θ) 解法二:II :0)s (A =有重根时:设1p 为m 阶重根,n 1m s ,s Λ+为单根 .则)s (F 可表示为: 其中单根n 1m c ,c Λ+的计算仍由(1)中公式(Ⅲ) (Ⅲ′)来计算. 重根项系数的计算公式:(说明原理) ●例5 3)(s 1)s(s 2s )s (F 2+++=求?)t (f =解:3s c s c 1s c 1)(s c )s (F 43122++++++=3.用拉氏变换方法解微分方程 ● 例 :u l l r l 222...=++ 解:s2L(s)22s s L 2=++]:[举例说明拉氏变换的用途之一—解线性常微分方程,引出传函概念。
如右图RC电路:初条件:c0c u )0(u = 输入 []t 1.E )t (u 0r = 依克西霍夫定律:L 变换:依(*)式可见,影响CR电路响应的因素有三个:r c01:u (t)2:u ⎫⎬⎭输入初条件分析系统时,为在统一条件下衡量其性能输入都用阶跃,初条件影响不考虑 3:系统的结构参数 ――只有此项决定系统性能c r U (s)1CRs 1U (s)=+零初条件下输入/出拉氏变换之比(不随输入形式而变) §2-3 线性定常系统的传递函数——上述CR电路的结论适用于一般情况 一般情况下:线性系统的微分方程:r(t)b (t)r b (t)r b (t)r b C(t)a (t)C a )t (C a )t (C m 1-m )1-m (1)m (0n 1-n )1-n (1)n (+'+++=+'+++ΛΛ简单讲一下: 传递函数的标准形式: I:D(s)为首1多项式型:根轨迹增益:K S K T1S T K G (s)**α+=+= II:D(s)为尾1多项式型: 开环增益:K 1TS KG(s)+= 开环增益的意义: 一般情况下:首1型:[][]*1n *1n *m1m *1m *-n 1m 1*n as a s s b s b s K )p s ()p s (s )z s ()z s (K G(s)ll l l l l -++++++=----=----ΛΛΛΛ (1)尾1型:[][]1s a s a s 1s b s b )1s T ()1s T (s )1s ()1s (K G(s)1n 1n 01m 1m 01m 1n ++++++=++++=-----ΛΛΛΛl l l l lττ (2)由(1)式:⎪⎩⎪⎨⎧-=-=∏∏==为极点为零点i -n 1i i *-n im 1i i *m p )p (a z )z (b ll (3) 比较(1)(2):)p ()z (K a b K K a b K -n 1i im1i i**-n *m *-n *m *∏∏==--===⋅lll (4)首1型多用于根轨迹法中. 尾1型多用于时域法,频域法中. 一 .传递函数定义:条件:⎪⎩⎪⎨⎧==='===='=--0)0(c)0(c )0(c 0)0(r)0(r )0(r )1m ()1n (ΛΛ 定义:有关概念:特征式,特征方程,特征根 零点i z ——使0G(s)=的s 值 极点j p ——使∞=G(s)的s 值n m a b K =:传递函数,增益,放大倍数→[])s (G s1.s lim)c(K a b 0s t 1r(t)n m →==∞== 结构图——系统的表示方法 G(s)分子分母与相应的微分方程之间的联系:⎭⎬⎫前面的系数式分子:前面的系数式分母:)s (R (*))s (C (*)完全取决于系统本身的结构参数注(1)为何要规定零初始条件?分析系统性能时,需要在统一条件下考查系统:输入:都用阶跃输入.初条件:都规定为零——为确定一个系统的起跑线而定.则系统的性能只取决于系统本身的特性(结构参数)(2) 为何初条件可以为零?1)我们研究系统的响应,都是从研究它的瞬时才把信号加上去的.2)绝大多数系统,当输入为0时,都处于相对静止状态.3)零初始条件是相对的,常可以以平衡点为基点(如小扰动为线性化时)(3) 零初条件的规定,并不妨碍非零初条件时系统全响应的求解.可以由G(s)回到系统微分方程,加上初条件求解.二 .传递函数的性质:b,a均为实常1.G(s) : 复函数,是自变量为s的有理真分式(m≤n)ii 数.m<n的解释:1). 实际系统都存在惯性,从微分方程上反映出来,即C(s)的阶次比R(s)阶次高.反映到G(s)上即有分母阶次n≥分子阶次m.2).反证法:设m>n则:说明:2.G(s): 只与系统本身的结构参数有关与输入的具体形式无关.输入变时,C(s)=G(s)R(s)变,但G(s)本身并不变化但G(s)与输入、输出信号的选择有关.r(t),c(t)选择不同,G(s)不同.(见前CR电路.)3. G(s)与系统的微分方程有直接联系4. [])t (k L G(s)(t)r(t)δ==→G(s)是系统单位脉冲响应的拉氏变换 5. G(s)与系统相应的零极点分布图对应G(s)的零极点均是复数,可在复平面上表示: 若不计传递函数,G(s)与其零极点分布图等价. 例:*2(2)G(s)(3)(22)s s s s K +=+++G(s)⇔系统零极点分布图 ⇔系统性能⎩⎨⎧.动态特性稳定性;若当系统参数发生变化时,分析其特性:1) 用解微分方程法十分繁琐——一个元部件参数改变,影响i i b ,a ,得反复解2) 若掌握了零极点分布与系统性能之间的规律性,则当某个元部件的参数改变时,i i b ,a 变化,零极点位置变化,系统性能的变化规律就能掌握了,这样,我们可以有目的地改变某些参数,改善系统的性能,且免除了解微分方程的烦恼。