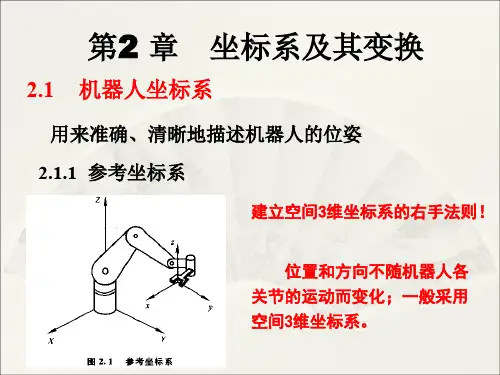
第二章 坐标系及其变换
- 格式:ppt
- 大小:1.91 MB
- 文档页数:92
数学中的坐标系与坐标变换数学是一门广泛应用于各个领域的学科,而坐标系和坐标变换则是数学中的重要概念。
本文将介绍什么是坐标系,坐标变换的概念以及它们在数学和现实生活中的应用。
一、坐标系坐标系是在某一平面或空间中确定点的位置的一种方式。
它由坐标轴和原点组成。
常见的坐标系包括二维笛卡尔坐标系和三维笛卡尔坐标系。
1. 二维笛卡尔坐标系二维笛卡尔坐标系由两条垂直的数轴组成,通常称为x轴和y轴。
原点是坐标系的交点,用(0,0)表示。
在二维笛卡尔坐标系中,每个点都可以表示为一个有序对(x, y),其中x表示点在x轴上的坐标,y表示点在y轴上的坐标。
2. 三维笛卡尔坐标系三维笛卡尔坐标系在二维笛卡尔坐标系的基础上增加了一条垂直于x轴和y轴的z轴。
在三维笛卡尔坐标系中,每个点都可以表示为一个有序组(x, y, z),其中x表示点在x轴上的坐标,y表示点在y轴上的坐标,z表示点在z轴上的坐标。
二、坐标变换坐标变换是指将一个点的坐标从一个坐标系转换到另一个坐标系的过程。
坐标变换在数学和物理学中都有着广泛的应用。
1. 平移平移是一种坐标变换,通过向所有的点添加一个常量向量,从而将一个坐标系中的点转换到另一个坐标系中。
例如,将一个点的坐标由(x, y)变为(x+a, y+b),其中(a, b)表示平移的向量。
2. 旋转旋转是一种坐标变换,通过围绕一个给定的中心点将点按照一定角度旋转,从而将一个坐标系中的点转换到另一个坐标系中。
旋转可以使用旋转矩阵或旋转角度表示。
3. 缩放缩放是一种坐标变换,通过改变点的坐标的比例,从而将一个坐标系中的点转换到另一个坐标系中。
缩放可以使点的坐标变大或变小,可以根据缩放因子在x方向和y方向上进行分别缩放。
三、数学与现实生活中的应用坐标系和坐标变换在数学和现实生活中有着广泛的应用。
以下是一些常见的应用情景:1. 几何学中的图形表示:坐标系可以用来表示几何图形,例如在平面上绘制直线、圆等图形,或者在空间中绘制立方体、球体等图形。
坐标系变换的概念和方法嘿,朋友们!今天咱来聊聊坐标系变换这个神奇的玩意儿。
你说坐标系变换像不像孙悟空的七十二变呐!它能把一个东西在不同的“世界”里变来变去,可有意思啦!比如说,咱在一个坐标系里看一个图形,普普通通的,没啥特别。
但要是给它来个坐标系变换,哇塞,一下子就变得不一样了,就好像突然给它施了魔法一样。
想象一下,你在一个平面上画了个正方形,这就是它在原本坐标系里的样子。
可要是咱把这个坐标系歪一歪,或者挪一挪,那这个正方形不就变样了嘛!它的位置、形状可能都会发生变化,多神奇呀!这就好像你原本在家里,然后你换了个房间,周围的一切看起来都不一样了。
坐标系变换在很多地方都大有用处呢!比如在物理学里,研究物体的运动。
物体在不同的参考系下运动状态可不一样哦!就像你坐在火车上,看窗外的树是往后跑,但在地面上的人看,树可没动呀。
这不就是坐标系变换在起作用嘛!在数学里那就更不用说啦,解决各种问题都可能用到它。
它能让复杂的问题变得简单,让我们能更清楚地看到问题的本质。
好比是给我们配上了一副神奇的眼镜,能看到别人看不到的东西。
咱再打个比方,坐标系变换就像是给一个故事换个角度来讲。
原本你从主角的视角看故事,觉得平平无奇。
但要是换个配角的视角,或者从反派的视角来看,哇,故事一下子就精彩起来了,有好多之前没注意到的细节都冒出来了。
你说这坐标系变换是不是特别厉害?它能让我们看到同一个事物的不同面,能让我们对世界的理解更加丰富。
它就像一把钥匙,能打开好多扇我们以前没发现的门。
所以啊,可别小看了这坐标系变换。
它不是那种高高在上、遥不可及的东西,而是就在我们身边,随时都能派上用场的好帮手。
我们要学会运用它,就像掌握了一门神奇的武功秘籍一样,能在知识的江湖里闯荡出一番天地来。
不管是解决难题,还是探索新的领域,坐标系变换都能给我们带来意想不到的惊喜呢!这不就是我们追求知识的乐趣所在嘛!。
直角坐标系和坐标变换直角坐标系是描述平面或空间中点位置的一种常用坐标系统。
它由两条互相垂直的坐标轴组成,通常被称为x轴和y轴。
坐标轴上的数值表示了点在对应轴上的位置,从而确定了点在整个坐标系中的位置。
而坐标变换则是通过一定的规则将点在一个坐标系中的表示转变为另一个坐标系中的表示。
一、直角坐标系直角坐标系是一种二维坐标系,由水平的x轴和垂直的y轴构成。
x轴和y轴的交点称为原点,通常用O表示。
在直角坐标系中,每个点都可以用一个有序数对(x, y)表示,其中x表示点在x轴上的位置,y表示点在y轴上的位置。
x轴和y轴的正方向上,数值逐渐增大。
在直角坐标系中,可以通过距离和角度来描述点和图形的性质。
例如,两点之间的距离可以使用勾股定理计算,而斜率可以帮助我们理解直线的倾斜程度。
二、坐标变换坐标变换是指将点在一个坐标系中的表示转变为另一个坐标系中的表示。
常见的坐标变换包括平移、旋转、缩放和镜像等。
1. 平移平移是指将一个点在坐标系中沿着某个方向移动一定距离。
如果要将一个点P(x, y)沿着x轴方向平移a个单位,y坐标保持不变,则新坐标是P(x+a, y);如果要将点P沿着y轴方向平移b个单位,x坐标保持不变,则新坐标是P(x, y+b)。
2. 旋转旋转是指将一个点或图形绕某个中心点按一定角度进行旋转。
在二维直角坐标系中,可以使用旋转矩阵对点进行旋转。
设点P(x, y)绕原点逆时针旋转θ角度,则新坐标是P'(x', y'),其中:x' = x * cosθ - y * sinθy' = x * sinθ + y * cosθ3. 缩放缩放是指将一个点或图形按照一定比例进行放大或缩小。
在二维直角坐标系中,可以使用缩放矩阵对点进行缩放。
设点P(x, y)按照比例s 进行缩放,则新坐标是P'(x', y'),其中:x' = s * xy' = s * y4. 镜像镜像是指将一个点或图形关于某个轴或面对称翻转。
坐标变换讲解
坐标变换是指将一个坐标系中的点或向量转换到另一个坐标系中的过程。
在二维情况下,一般使用2x2的矩阵来表示坐标变换,而在三维情况下则使用3x3的矩阵。
在二维情况下,假设有两个坐标系A和B,坐标系A中的点P(x,y)需要转换到坐标系B中的点P'(x',y')。
坐标变换可以通过以下公式来实现:
[x'] = [a b] [x]
[y'] [c d] [y]
其中,a、b、c和d是转换矩阵的元素,它们定义了从坐标系A 到坐标系B的转换关系。
具体来说,a和d表示坐标轴的缩放因子,b和c表示坐标轴的旋转因子。
在三维情况下,坐标变换的方式稍有不同。
假设有两个坐标系A 和B,坐标系A中的点P(x,y,z)需要转换到坐标系B中的点P'(x',y',z')。
坐标变换可以通过以下公式来实现:
[x'] = [a b c] [x]
[y'] [d e f] [y]
[z'] [g h i] [z]
其中,a、b、c、d、e、f、g、h和i是转换矩阵的元素,它们定义了从坐标系A到坐标系B的转换关系。
具体来说,a、e和i表示坐标轴的缩放因子,b、c、d、f、g和h表示坐标轴的旋转和剪切因子。
需要注意的是,坐标变换不仅仅可以用矩阵表示,还可以使用四元数、欧拉角等方式进行表示。
此外,在实际应用中,坐标变换经常涉及到平移操作,可以通过引入齐次坐标进行处理。
总之,坐标变换是将一个坐标系中的点或向量转换到另一个坐标系中的过程,通过定义适当的转换矩阵或其他表示方式,可以实现不同坐标系之间的转换。

§2-2 常用坐标系及其变换坐标系的定义:坐标系是量测物体的质心或质点在空间的相对位置,以及物体在空间的相对方位所使用的基准线组。
引入坐标系的目的:1 确切地描述飞行器的运动状态。
2 研究飞行器运动参数的变化规律。
1 惯性坐标系定义:一、常用坐标系的定义¾近程导弹飞行力学中,忽略地球的自转和公转,将与地球固连的坐标系看作惯性坐标系。
¾远程导弹飞行力学中,应考虑地球自转,将以地心为原点,坐标轴不随地球自转而转动的坐标系看作惯性坐标系。
在空间位置不变或作直线运动的坐标系。
实际应用时应注意的问题:2 直角坐标系定义:又称“笛卡儿坐标系”,轴线互相垂直的坐标系。
原点:发射点(发射飞行器时的惯性中心上)地面坐标系()轴:指向任何方向,通常取指向目标的方向。
轴:轴:d ddOXY Z O d OY d OX d OZ 与轴垂直,并位于过O 点的铅垂面内,指向上方。
d OX 与、轴垂直并组成右手坐标系。
dOX d OY特点:固连于地球表面,随地球一起转动可以看作惯性系。
由于有翼导弹飞行距离小、飞行时间短,因此可以把地球看作静止的,并把地球表面看作平面,此时可以将地面系看作惯性系。
对于近程导弹来说,可以认为重力与Y轴平行,方向相反。
地面,取包含发射点的水平面或称切平面。
基准面:目的:决定飞行器重心移动的规律、空间的姿态、导弹速度方向。
原点:导弹的质心。
弹体坐标系()轴:沿纵轴,指向头部为正。
轴:轴:111OX Y Z O 1OY 1OX 1OZ 与轴垂直,并位于纵向对称平面内,指向上方为正。
1OX 弹体纵向对成平面垂直,并与、轴组成右手坐标系。
1OX 1OY特点:与弹体固连,相对于弹体不动;动坐标系。
目的:决定导弹相对于地面坐标系的姿态;把导弹旋转运动方程投影到该坐标系上,可以使方程式简单清晰。
导弹气动力矩三个分量沿此系分解;常用于研究导弹的稳定性和操纵性。
原点:导弹的质心。
弹道固连系()轴:与飞行速度方向一致。
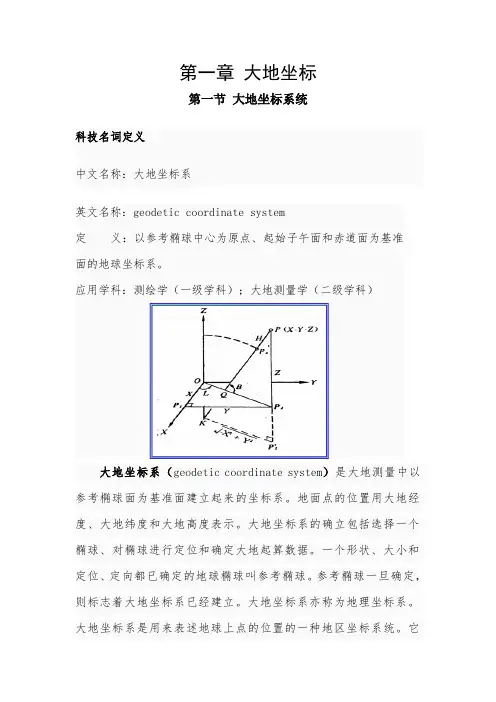
第一章大地坐标第一节大地坐标系统科技名词定义中文名称:大地坐标系英文名称:geodetic coordinate system定义:以参考椭球中心为原点、起始子午面和赤道面为基准面的地球坐标系。
应用学科:测绘学(一级学科);大地测量学(二级学科)大地坐标系(geodetic coordinate system)是大地测量中以参考椭球面为基准面建立起来的坐标系。
地面点的位置用大地经度、大地纬度和大地高度表示。
大地坐标系的确立包括选择一个椭球、对椭球进行定位和确定大地起算数据。
一个形状、大小和定位、定向都已确定的地球椭球叫参考椭球。
参考椭球一旦确定,则标志着大地坐标系已经建立。
大地坐标系亦称为地理坐标系。
大地坐标系是用来表述地球上点的位置的一种地区坐标系统。
它采用一个十分近似于地球自然形状的参考椭球作为描述和推算地面点位置和相互关系的基准面。
一个大地坐标系统必须明确定义其三个坐标轴的方向和其中心的位置。
通常人们用旋转椭球的短轴与某一规定的起始子午面分别平行干地球某时刻的平均自转轴和相应的真起始子午面来确定坐标轴的方向。
若使参考椭球中心与地球平均质心重合,则定义和建立了地心大地坐标系。
它是航天与远程武器和空间科学中各种定位测控测轨的依据。
若椭球表面与一个或几个国家的局部大地水准面吻合最好,则建立了一个国家或区域的局部大地坐标系。
大地坐标系中点的位置是以其大地坐标表示的,大地坐标均以椭球面的法线来定义。
其中,过某点的椭球面法线与椭球赤道面的交角为大地纬度;包含该法线和大地子午面与起始大地子午面的二面角为该点的大地经度;沿法线至椭球面的距离为该点的大地高。
大地纬度、大地经度和大地高分别用大写英文字母B、L、H表示。
大地坐标系是以地球椭球赤道面和大地起始子午面为起算面并依地球椭球面为参考面而建立的地球椭球面坐标系。
它是大地测量的基本坐标系,其大地经度L、大地纬度B和大地高H为此坐标系的3个坐标分量。
它包括地心大地坐标系和参心大地坐标系。
坐标变换知识点总结坐标变换是指在一个坐标系中的点通过一定的变化规则,转换到另一个坐标系中的过程。
坐标变换在数学、物理、工程等多个领域中都有广泛的应用。
下面是坐标变换的一些重要知识点总结。
1.坐标系的描述:坐标系是用来描述几何空间中的点的一种数学工具。
常见的坐标系有直角坐标系、极坐标系、球坐标系等。
直角坐标系由x、y、z轴构成,其中x轴是水平方向,y轴是垂直方向,z轴是垂直于x-y平面的方向。
2.坐标向量:在直角坐标系中,一个点的坐标可以用一个向量表示,这个向量称为坐标向量。
坐标向量的形式为(x,y,z),其中x、y、z分别表示点在x、y、z轴上的坐标值。
3.坐标变换的表示:坐标变换可以通过矩阵的乘法运算来表示。
假设从坐标系A变换到坐标系B,其中点的坐标向量在坐标系A中表示为P,坐标系B中表示为P',那么坐标变换可以表示为P'=AP,其中A为变换矩阵。
4.坐标变换矩阵的求解:坐标变换矩阵的求解可以通过点的转换关系来进行。
假设已知坐标系A中的三个基向量a1、a2、a3与坐标系B中的三个基向量b1、b2、b3之间的转换关系为:a1=s11b1+s12b2+s13b3a2=s21b1+s22b2+s23b3a3=s31b1+s32b2+s33b3其中s11、s12、s13等为常数,那么可以得到坐标变换矩阵A为:A=[s11s12s13s21s22s23s31s32s33]5.坐标轴的旋转变换:坐标轴的旋转变换是指基于原有坐标轴的旋转操作,将点的坐标映射到新的坐标系中。
旋转变换可以通过对坐标向量进行矩阵乘法操作来实现。
假设已知原有坐标系中点的坐标为P,将x轴顺时针旋转角度θ得到的新的坐标系中点的坐标为P',那么旋转变换可以表示为:P' = [cosθ -sinθ 0sinθ cosθ 0001]×P6.坐标轴的缩放变换:坐标轴的缩放变换是指基于原有坐标轴的缩放操作,将点的坐标映射到新的坐标系中。
坐标系变换方法引言:坐标系变换是数学中重要的概念,它在不同学科领域的应用十分广泛。
坐标系变换方法可以帮助我们在解决问题时更好地描述和分析空间中的物体运动、变形以及其他相关性质。
本文将介绍坐标系变换的概念、常见的坐标系以及不同坐标系之间的转化方法。
另外,我们还会探讨一些拓展应用,以增强我们对坐标系变换方法的理解。
正文:一、坐标系的概念坐标系是指用于确定物体在空间中位置和方向的基准系统。
我们常见的三维坐标系是笛卡尔坐标系,也称为直角坐标系,它由三条相互垂直的坐标轴组成,分别用x、y和z表示。
在笛卡尔坐标系中,任何一个点的位置都可以通过该点在各坐标轴上的投影来确定。
除了笛卡尔坐标系,我们还常用极坐标系和球坐标系来描述特定问题。
极坐标系通过极径和极角来定位一个点,常用于描述环形问题。
球坐标系则基于球体的半径、极角和方位角来定位一个点,常用于描述天体运动和物体在球面上的运动。
二、坐标系的转化方法当我们需要在不同坐标系下描述同一个物体的运动或性质时,就需要进行坐标系的转化。
以下介绍几种常见的坐标系转化方法:1. 平移变换:平移变换是指将坐标系沿着某个方向移动一段距离。
例如,在笛卡尔坐标系中,将整个坐标系沿着x轴正方向平移d个单位,可以通过将所有坐标点的x坐标加上d来实现。
2. 旋转变换:旋转变换是指将坐标系绕着某个点或轴旋转一定角度。
在笛卡尔坐标系中,可以通过将点(x, y)绕原点逆时针旋转θ角度得到新的坐标(x',y')。
其中,旋转变换可以通过矩阵运算进行计算。
3. 缩放变换:缩放变换是指将坐标系中的所有点沿着坐标轴方向进行放大或缩小。
在笛卡尔坐标系中,可以通过将点(x, y)的坐标分别乘以经过缩放的因子s来实现。
以上是常见的坐标系变换方法,它们可以在解决具体问题时灵活运用。
三、拓展应用除了将几何问题转换到不同坐标系来求解,坐标系变换方法还有一些有趣的拓展应用。
1. 图像处理:在图像处理中,常用的坐标系转换方法包括旋转、平移和缩放变换。
坐标系的基本变换在数学和计算机图形学中,坐标系的基本变换是一个重要的概念。
通过对坐标系进行变换,我们可以在不改变对象本身的情况下,改变其位置、方向和尺寸,从而实现各种复杂的图形操作。
1. 二维坐标系的基本变换在二维空间中,我们通常使用笛卡尔坐标系来描述点的位置。
假设我们有一个点P(x, y),我们可以通过以下方式对其进行基本变换:•平移:给定平移向量T(dx, dy),新的点P’(x’, y’) = P(x + dx, y + dy)。
•缩放:给定缩放因子S(sx, sy),新的点P’(x’, y’) = P(x * sx, y * sy)。
•旋转:给定旋转角度θ,绕原点旋转后新的点P’(x’, y’) = (x cosθ - y sinθ, x sinθ + y cosθ)。
2. 三维坐标系的基本变换在三维空间中,我们通常使用右手坐标系来描述点的位置。
与二维相似,对三维坐标系的基本变换也可以应用于平移、缩放和旋转:•平移:给定平移向量T(dx, dy, dz),新的点P’(x’, y’, z’) = P(x + dx, y + dy, z + dz)。
•缩放:给定缩放因子S(sx, sy, sz),新的点P’(x’, y’, z’) = P(x * sx, y * sy, z * sz)。
•旋转:给定旋转角度绕X轴、Y轴、Z轴旋转的角度θx、θy、θz,绕X轴顺序旋转先后的新的点P’(x’, y’, z’)可以由一系列矩阵运算得到。
3. 应用举例基本变换在计算机图形学中被广泛应用,例如对于物体的运动、变形等操作。
另外,在计算机辅助设计、游戏开发等领域也大量使用基本变换来处理对象的位置和姿态。
结论坐标系的基本变换是计算机图形学和几何学中的重要概念,通过对坐标系的变换,我们可以实现对对象的各种变换效果,从而实现各种复杂的图形操作。
掌握基本变换的原理和应用将有助于我们更好地理解和应用计算机图形学相关的知识。
让我们一起来认识坐标系与坐标变换一、坐标系的概念与作用在数学和物理学中,坐标系是一种描述点的位置的系统,它由坐标轴和原点组成。
我们可以利用坐标系来精确地确定一个点的位置,从而进行各种数学计算和几何分析。
1.1 笛卡尔坐标系最常见的坐标系是笛卡尔坐标系,也称为直角坐标系。
它由垂直于彼此的两条直线构成,形成了一个二维平面。
这两条直线分别称为x 轴和y轴,它们的交点被定义为坐标系的原点(0, 0)。
1.2 极坐标系除了笛卡尔坐标系,还有一种常用的坐标系叫做极坐标系。
它通过一个点到原点的距离和与x轴的夹角来描述一个点的位置。
极坐标系常用于描述圆形和柱状对象的位置。
1.3 坐标系的作用坐标系在数学和物理学中有着广泛的应用。
它们可以帮助我们准确地定位和描述各种事物,从微观粒子到宇宙中的天体,都需要利用坐标系来进行研究和分析。
二、坐标变换的基本原理坐标变换是指将一个坐标系中的点的位置转换到另一个坐标系中的过程。
在实际应用中,我们经常需要将一个物体在一个坐标系中的位置描述转换为另一个坐标系中的位置描述,以实现不同坐标系之间的相互转换和计算。
2.1 平移变换平移变换是指将一个点沿着x轴和y轴的方向移动一定的距离,在新的坐标系中给出其新的位置。
一般来说,平移变换可以通过在原始坐标上加上一个平移向量来实现。
2.2 旋转变换旋转变换是指将一个点绕着指定的中心点旋转一定角度,在新的坐标系中给出其新的位置。
旋转变换可以通过一组数学公式和矩阵运算来实现。
2.3 缩放变换缩放变换是指将一个点的位置在x轴和y轴方向上按比例放大或缩小,在新的坐标系中给出其新的位置。
缩放变换可以通过乘以一个缩放因子的方式进行。
三、实际应用案例3.1 地图坐标系在地图应用中,我们经常需要将地球上的一个点的经纬度转换为平面坐标系中的x轴和y轴坐标,以便在地图上显示。
这涉及到大地坐标系和平面直角坐标系之间的坐标变换。
3.2 机器人定位在机器人技术中,机器人的定位是一个重要的问题。