Adams柔性体例子—机器人Adams虚拟实验详细步骤
- 格式:doc
- 大小:410.00 KB
- 文档页数:26
![Ansys和ADAMS柔性体转化问题的详细步骤[1]](https://uimg.taocdn.com/ee680fd076eeaeaad1f3309d.webp)
一、Ansys和ADAMS柔性体转化问题的详细步骤1.进行单元类型定义,实体可选solid 45,质量单元选择mass21;2.编辑mass21质量单元preprocessor->real constant->add/edit/delete在对话框中填写属性,一般要很小的数值,如1e-5等;3.设置材料特性,要求有弹性模量(一般为2e11),泊松比(一般为0.3),密度(如钢为7850)这些参数;4.建立几何模型,使用solid 45进行划分网格,5.建立keypoints,此处注意,创建的keypoints的编号不能与模型单元的节点号重合,否则会引起原来的模型变形;6.选择mass21单元对5中建立的keypoints进行网格划分,建立起interfacenodes,在导入adams后这些interface nodes会自动生成mark点,通过这些点和其他刚体或柔体建立连接;7.建立刚性区域(在ADAMS作为和外界连接的不变形区域,必不可少的),preprocessor->coupling/ceqn->rigid region,选择interface nodes附近的区域的nodes与其相连,由于连接点的数目必须大于或等于2,所以刚性区域至少两个;先选择interface node,单击Apply,再选周围的nodes。
8.执行solution->ADAMS connection->Export to ADAMS命令,要选择的节点为7中建立刚性区域的节点(仅仅是interface nodes),输出单位就选SI就行;即可生成*.mnf文件。
不需要对任何节点作任何自由度的限制。
附:catia导入ansys方法先将catia文件以model格式另存,打开ansys, file/import/catia…在打开的对话框中选择model格式的catia文件,就可以了。

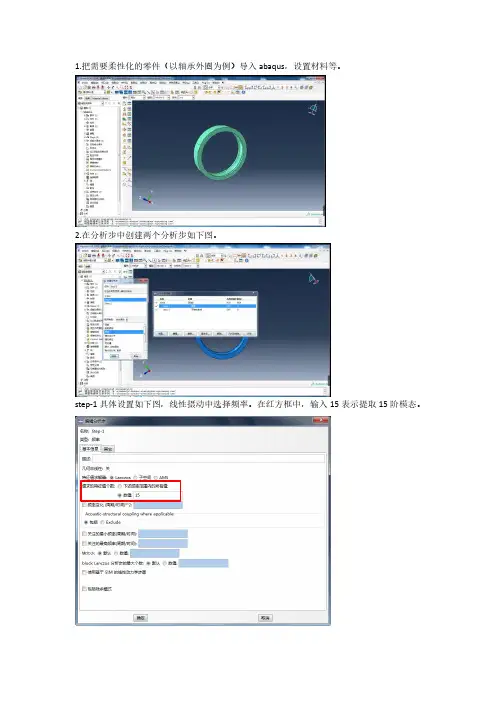
1.把需要柔性化的零件(以轴承外圈为例)导入abaqus,设置材料等。
2.在分析步中创建两个分析步如下图。
step-1具体设置如下图,线性摄动中选择频率。
在红方框中,输入15表示提取15阶模态。
step-2具体设置如下图,线性摄动中选择子结构生成。
在基本信息中输入子结构标识符Z(101)可以随意取名。
在选项中设置保留的模态。
3.在相互作用中建立RP点,然后创建MPC约束,选择RP点为控制点,内沟道为从结点。
4.在载荷中设置边界条件。
在step-1中创建BC-1:完全固定RP点。
在step-2中创建BC-2:保留RP点的6个自由度。
5.生成网格6.点击模型—编辑关键字—Model-1 输入如下代码(红色后面部分):*Substructure Generate, overwrite, type=Z101, recovery matrix=YES,MASS MATRIX=YES *FLEXIBLE BODY,TYPE=ADAMS*ELEMENT RECOVERY MATRIX, POSITION=AVERAGED AT NODESS,E,7.提交并分析作业。
8.接下来生成mnf文件:打开Abaqus Command,切入E盘,进入保存目录如E:\zysxmsdjc\abaqus\rouxinghua然后输入如下代码:(红色字体分别为保存名、作业名)abaqus adams job=youxing substructure_sim=youxing_Z101model_odb=youxing length=mm mass=tonne time=sec force=N9.打开adams,右键点击外圈,选择柔性化,点击导入,导入mnf文件。
即可完成外圈的柔性化。
成绩采用ADAMS和MATLAB建立机械装置或机电装置虚拟样机——四足机器人建模与仿真实验报告院(系)名称自动化科学与电气工程专业名称控制工程学生学号0学生姓名0指导教师02016年4月一、实验背景1. 参照自然界四足哺乳动物如猫狗的运动形式,对四足机器人进行建模,结合虚拟样机技术软件ADAMS,对四足机器人进行步态规划、运动学和动力学分析,使四足机器人模型良好运行。
2. 利用拉格朗日能量法建立四足机器人坐标系并对四足机器人进行运动学分析。
3.在Solidworks中建立四足机器人三维模型,之后将三维模型导入至虚拟样机软件ADAMS中,在ADAMS中建立虚拟样机模型,并利用样条曲线来规划机器人的运动轨迹,进行仿真,实现机器人的直线行走。
二、实验原理2.1 研究对象背景分析移动机器人按移动方式大体分为两大类;一是由现代车辆技术延伸发展成轮式移动机器人(包括履带式);二是基于仿生技术的运动仿生机器人。
运动仿生机器人按移动方式分为足式移动、蠕动、蛇行、游动及扑翼飞行等形式,其中足式机器人是研究最多的一类运动仿生机器人。
自然环境中有约50%的地形,轮式或履带式车辆到达不了,而这些地方如森林,草地湿地,山林地等地域中拥有巨大的资源,要探测和利用且要尽可能少的破坏环境,足式机器人以其固有的移动优势成为野外探测工作的首选,另外,如海底和极地的科学考察和探索,足式机器人也具有明显的优势,因而足式机器人的研究得到世界各国的广泛重视。
现研制成功的足式机器人有1足,2足,4足,6足,8足等系列,大于8足的研究很少。
曾长期作为人类主要交通工具的马,牛,驴,骆驼等四足动物因其优越的野外行走能力和负载能力自然是人们研究足式机器人的重点仿生对象。
因而四足机器人在足式机器人中占有很大的比例,四足机器人的研究深具社会意义和实用价值。
2.2 研究对象数学模型分析四足机器人整体结构由躯体、左前腿、右前腿、左后腿、右后腿五部分组成。
四足机器人的设计为两腿包含两个关节,分别为髋关节和膝关节,在关节位置添加驱动,这两个驱动为主动自由度,小腿为被动自由度。
ADAMS柔性体运动仿真分析及运用摘要:ADAMS(Automated Dynamic Analysis of Mechanical Systems)是一种用于机械系统运动仿真分析的软件工具,它可以模拟复杂的运动和多体动力学行为。
本文介绍了ADAMS软件及其在柔性体运动仿真分析中的应用,包括柔性体建模、刚-柔耦合系统模拟、柔性体动力学分析和柔性体控制策略等方面。
1.引言ADAMS是一种用于机械系统运动仿真分析的软件工具,由美国MSC Software公司开发。
它可以模拟复杂的运动和多体动力学行为,广泛应用于机械系统设计、优化和性能评估等领域。
柔性体是一种具有形变和弯曲等特性的物质,出现在很多工程和机械系统中。
ADAMS软件能够对柔性体运动进行仿真分析,帮助工程师更好地理解和预测柔性体系统的运动行为。
2.ADAMS柔性体建模在ADAMS中,柔性体可以通过素材法(Material Subsystem)进行建模。
素材法是一种基于连续介质力学的方法,将物体划分为多个微小单元,并根据其材料性质和力学行为进行建模。
通过调整单元的尺寸和连接方式,可以模拟各种不同的柔性体结构和形变行为。
3.刚-柔耦合系统模拟在实际工程中,往往存在着刚体和柔性体相互作用的情况,这就需要进行刚-柔耦合的系统模拟。
ADAMS可以通过使用接触、连接和约束等功能来实现刚-柔耦合系统的建模。
例如,在汽车悬挂系统中,车轮和车身之间存在接触和连接关系,同时车身又是一个柔性体,这就需要通过ADAMS进行刚-柔耦合系统模拟。
4.柔性体动力学分析ADAMS可以对柔性体系统进行动力学分析,包括振动分析、形变分析和动态响应分析等。
通过设置初始条件和加载条件,可以对柔性体系统的运动行为进行模拟和分析。
例如,在机械臂系统中,可以通过ADAMS对机械臂的振动和形变进行分析,进而优化机械臂的结构设计和控制策略。
5.柔性体控制策略在柔性体系统中,控制策略对于保持系统的稳定性和精确性起着重要作用。
ADA MS中的柔性体分析研究3赵希芳(南京电子技术研究所, 江苏南京210013)摘 要:在系统动力学分析中,柔性体的分析是一大难点。
文中对ADAMS软件中的柔性体处理方法进行了总结,并详细介绍了生成及使用柔性体过程中的关键问题。
关键词:ADAMS;柔性体;模态中图分类号:T B115 文献标识码:A 文章编号:1008-5300(2006)03-0062-03A Study on Flexible Body Using ADA MSZHAO Xi2fang(1.N anjing R esea rch Institute of E lectronics Technology, N anjing210013,Ch ina)Abstract:Analysis of Flexible Body is a difficult p r oble m in syste m dyna m ics analysis.I n this paper,meth2 ods of flexible body analysis are summaried up,and key points in the p r ocess of generating and using flexible body are described.Key words:ADAMS;flexible body;module0 引 言ADAMS是美国MD I公司开发的机械系统动力学仿真分析软件,其求解器采用多刚体动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
对系统动力分析而言,结构本身的弹性变形与系统的宏观刚体运动同等重要。
ADAMS中的所有物体均以刚体定义,忽略结构柔度对系统的影响,一般的有限元分析软件对包含大位移运动的系统动力学分析又无能为力,因此在ADAMS中实现刚体和柔体相结合的系统动力学分析是一个较可行的解决方法。
一、Ansys和ADAMS柔性体转化问题的详细步骤1.进行单元类型定义,实体可选solid 45,质量单元选择mass21;2.编辑mass21质量单元preprocessor->real constant->add/edit/delete在对话框中填写属性,一般要很小的数值,如1e-5等;3.设置材料特性,要求有弹性模量(一般为2e11),泊松比(一般为0.3),密度(如钢为7850)这些参数;4.建立几何模型,使用solid 45进行划分网格,5.建立keypoints,此处注意,创建的keypoints的编号不能与模型单元的节点号重合,否则会引起原来的模型变形;6.选择mass21单元对5中建立的keypoints进行网格划分,建立起interfacenodes,在导入adams后这些interface nodes会自动生成mark点,通过这些点和其他刚体或柔体建立连接;7.建立刚性区域(在ADAMS作为和外界连接的不变形区域,必不可少的),preprocessor->coupling/ceqn->rigid region,选择interface nodes附近的区域的nodes与其相连,由于连接点的数目必须大于或等于2,所以刚性区域至少两个;先选择interface node,单击Apply,再选周围的nodes。
8.执行solution->ADAMS connection->Export to ADAMS命令,要选择的节点为7中建立刚性区域的节点(仅仅是interface nodes),输出单位就选SI就行;即可生成*.mnf文件。
不需要对任何节点作任何自由度的限制。
附:catia导入ansys方法先将catia文件以model格式另存,打开ansys, file/import/catia…在打开的对话框中选择model格式的catia文件,就可以了。
虚拟样机仿真与测试实验报告一、实验目的(1)了解ADAMS软件的建模和分析方法;(2)初步掌握ADAMS进行机构参数化建模的方法;(3)初步掌握ADAMS添加运动约束、运动驱动、仿真分析、参数测量。
二、实验内容及参数图所示为某机器的曲柄滑块机构,圆盘1以n=60r/min的转速逆时针旋转,在滑块的端部作用有载荷F,F的方向与滑块运动的方向相反。
已知:圆盘1的半径R=301mm,厚度δ=100mm,材料密度为7.8×10-3kg/cm3;连杆2长度L=1330mm,宽度w=150mm,厚度δ=50mm,质量Q=65kg,惯性矩Ixx=6.9kg·m2,Iyy=6.80kg·m2,Izz=0.132kg·m2,滑块3长度L=400mm 高度h=300mm,厚度δ=300mm,材料为黄铜。
试进行以下的建模和分析:(1) 分别在ADAMS和MATLAB中计算滑块的位置、速度和加速度,并比较计算结果。
(2) 载荷F=10kN时,确定所需的圆盘驱动力矩。
(3) 设置驱动力矩,测量滑块的位置和速度。
对此机构在ADAMS环境下建立模型,设置约束,并利用ADAMS对曲柄滑块进行运动分析,并绘制运动曲线。
三、实验步骤(1)启动ADAMS程序(2)检查和设置建模基本环境(3)几何建模(4)施加约束力(5)对曲柄滑块机构进行仿真分析(6)仿真分析后处理四、计算机求解结果与分析(1)ADAMS环境下的计算结果:TIME (sec) X (m) V(m/s) A(m/s) M(N*m)0.0000 1.700000 0.000000 -15.09085 98.80200 0.0250 1.695299 -0.3751346 -14.82142 1001.581 0.0500 1.681373 -0.7361974 -13.98839 1835.062 0.0750 1.658745 -1.068336 -12.59562 2536.051 0.1000 1.628254 -1.363140 -10.72937 3061.189 0.1125 1.610399 -1.492081 -9.811443 3264.860 0.1375 1.570272 -1.709107 -7.526801 3503.577 0.1625 1.525445 -1.867225 -5.097742 3559.868 0.2000 1.452706 -1.989229 -1.422218 3364.103 0.2250 1.402771 -1.995746 0.8754129 3105.036 MATLAB环境下的计算结果(抽取部分值):Time | s| v| a0.000000| 1.690000| 0.000000|-15.0908480.027778| 1.684201|-0.415931|-14.7396330.055556| 1.667072|-0.812560|-13.7085580.083333| 1.639405|-1.171828|-12.0644010.111111| 1.602462|-1.478115|-9.9149580.138889| 1.557892|-1.719292|-7.4026520.166667| 1.507622|-1.887551|-4.6938370.194444| 1.453733|-1.979864|-1.9634310.222222| 1.398318|-1.997964| 0.6239700.250000| 1.343368|-1.947787| 2.933331比较ADAMS与MATLAB中的计算结果,得:ADAMS与MATLAB中的计算结果比较近似,在滑块位移的计算中存在千万分位上的误差,在滑块速度和加速度的计算中存在万分位上的误差。
ADAMS柔性体-刚柔耦合模块一、ADAMS柔性体理论1、ADAMS研究体系:a)刚体多体系统(低速运动)b)柔性多体系统(考虑弹性变形,大轻薄,高速)c)刚柔耦合多体系统(根据各个构件情况考虑,常用普遍仿真类型)大部分仿真分析都采用的是刚性构件,在受到力的作用不会产生变形,现实中把大部分构件当做刚性体处理是可以满足要求的,因为各个零件之间的弹性变形对于机构各部分的动态特性影响微乎其微。
但是需要考虑构件变形,变形会影响精度结果,需要对构件其应力大小和分布以及载荷输出研究的时候,以及薄壁构件,高精密仪器部件等,则需要当做柔性体对待,这样计算结果会准确一些。
对于柔性体机构,变形对动态影响起着决定性作用,刚柔耦合系统约束的添加必须考虑各个零部件之间的连接和受力关系,更可能还原实际工况,从而使模型更真实还原。
2、柔性体柔性体是由模态构成的,要得到柔性体就需要计算构件的模态。
柔性体最重要的假设就是仅考虑了相对于连体坐标系得晓得线性变形,而连体坐标系同时也在做大的非线性运动。
对于柔性体变形,模态中性文件必然存在某一些模态不响应,没有参与变形或者变性太大,参与系数非常小,比如前六阶或者不正常的阶数,如果去掉贡献较小的模态阶数,便可以提高仿真的效率。
…………3、模态谈到柔性体,就必然脱不了模态的概念,构件的模态是构件自身的一个物理属性,一个构件一旦制造出来,他的模态就是自身的一种属性,再将几何模型离散成有限元模型以后,有限元模型的各个节点有一定的自由度,这样所有的节点自由度的和就构成了有限元模型的自由度,一个有限元模型有多少自由度,它就有多少阶模态。
由于构件各个节点的实际位移是模态的按一定比例的线性叠加,这个比例就是一个系数,通常成为模态参与因子,参与因子越大,对应的模态对于构件变形的贡献量越多,因此对构件的振动分析,可以从构件的模态参与因子大小来分析,如果构建在振动时,某阶模态的参与因子大,可以通过改进设计,抑制改接模态对振动贡献量,可以明显降低构件的振动。
ADAMS 柔性体运动仿真分析及运用焦广发,周兰英(理工大学机械与车辆工程学院100081)摘要介绍了ADAMS柔性体基本理论及在ADAMS中生成柔性体的几种方法,并构建机械系统仿真模型.通过一个实例验证了ADAMS 柔性体运动仿真分析的实效.关键词:ADAMS 柔性体运动仿真继电器Application of ADAMS flexible body kinetic simulationJiao guangfa Zhou lanying(Beijing institute of technology ,school of mechanical and vehicular engineering , Beijing 100081 )Abstract Introduced the basic theory of ADAMS flexible body and some methods of adding flexible bodies to a model to study the dynamic characteristics of the mechanical system1,constructed mechanical system simulation model1 Tested the validity of the ADAMS flexible kinematical simulation through an example1.Key words :ADAMS Flexible body Kinetic simulation relayADAMS全称是机械系统自动动力学分析软件,它是目前世界围最广泛使用的多体1系统仿真分析软件,其建模仿真的精度和可靠性在现在所有的动力学分析软件中也名列前茅.机械系统动力学仿真分析是机械设计的重要容,过去分析时建立的模型,其构件都是属于刚体,在作运动分析时不会发生弹性变形.而实际上,在较大载荷或加、减速的情况下,机构受力后会有较大的变形和位移变化,产生振动.ADAMS的分析对象主要是多刚体,但ADAMS 提供了柔性体模块,运用该模块可以实现柔性体运动仿真分析,以弹性体代换刚体,可以更真实地模拟出机构动作时的动态行为,同时还可以分析构件的振动情况[1].一、ADAMS 柔性体理论及生成柔性体的几种方法ADAMS 柔性模块是采用模态来表示物体弹性的,它基于物体的弹性变形是相对于连接物体坐标系的弹性小变形,基金项目:北京市重点学科建设(XK100070424);北京理工大学基金(0303E10)作者简介:焦广发(1982—),男,河北人,硕士,主要研究方向为动力学仿真,有限元分析和表面涂层技术. 同时物体坐标系又是经历大的非线性整体移动和转动这个假设建立的.其基本思想是赋予柔性体一个模态集,采用模态展开法,用模态向量和模态坐标的线性组合来表示弹性位移,通过计算每一时刻物体的弹性位移来描述其变形运动.ADAMS 柔性模块中的柔性体是用离散化的若干个单元的有限个结点自由度来表示物体的无限多个自由度的.这些单元结点的弹性变形可近似地用少量模态的线性组合来表示.ADAMS 提供了四种生成柔性体的方法,对于外形简单的构件,可以采用直接生成柔性件的方法,即拉伸模式;对于外形复杂的构件,可以采用先建刚性件, 再进行网格划分的模式, 即构件网格模式(Solid).1) 拉伸法生成柔性体:首先要确定拉伸中心线,再定义截面半径、单元尺寸、材料属性等,最后定义好柔性体跟其它构件的连接点即外连点,就可以生成柔性体.模型生成柔性件的同时生成模态中性文件,该模态中性文件中包含了柔性件的质量、质心、转动惯量、频率、振型以及对载荷的参数因子等信息.将模型中原有的刚体件上的运动副修改在柔性件上,使柔性件与模型上的其它构件连接起来,同时删除无效的刚性件.这样可以使模型保持原有的自由度,从而实现柔性构件的运动仿真运算.2)几何外形法生成柔性体:这种方法是将几何体的外形所占用的空间进行有限元离散化,几何体既可以是在ADAMS/View中创建的,也可以是从其他CAD软件中导入的模型.这种方法首先要定义柔性件的附着点,即柔性件与其它构件的连接点.定义好附着点后,需要在附着点的附近的网格结点上选取适当数量结点作为力的作用点,作用点的数量和位置根据模型精度的需要来选取.最后,将选取的结点转换成ADAMS 的标识ID后,就可以生成模态中性文件.用这种方法与拉伸法相比,拉伸法创建的柔性体是六面体单元,而几何外形法生成的柔性体是四面体单元.一般来说六面体单元要比四面体单元要好些.3)导入有限元模型的网格文件创建柔性体:在ADAMS/AutoFlex的Flexbody 中选择Import mesh项,然后输入网格文件名,最后定义网格的材料属性,壳单元的厚度和计算的模态数,就可以导入柔性体,但是应用围很小,只能输入Natran的bdf网格文件和I-DEAS的universal网格文件[2].4)利用ANSYS的宏命令生成ADAMS 柔性体:ANSYS是一个多重物理有限元分析软件,适用于各种复杂的、跨领域的分析设计.ANSYS与ADAMS之间的双向数据接口可以方便地处理柔性体部件对机械系统运动的影响,并得到基于精确动力学分析结果的应力应变分析结果,从而提高分析水平.通过ADAMS软件与ANSYS 软件之间的接口,可以很方便的考虑柔性体部件对机械系统运动的影响,并得到基于精确动力学仿真结果的应力应变分析结果,提高分析精度.ANSYS程序在生成柔性体部件的有限元模型之后,利用ADAMS宏命令可以很方便地输ADAMS软件所需要的模态中性文件Jobname.mnf 此文件包含了ADAMS中柔性体的所有信息.在ADAMS软件中直接读入此文件即可看到柔性体部件的模型,指定好柔性体与其它部件的连结方式, 并给系统施加必要的外载后即可进行系统的动力学仿真[3].二、实例分析本文主要应用ADAMS提供的几何外形法生成柔性体.1.应用solidworks软件建立继电器三维实体模型,模型由衔铁、顶支架、底支架、触头、动簧片、动断静簧片、动何静簧片等组成,在建立模型过程中,对模型作了简化,省略了线圈、磁铁等部件,结构如图:1.顶支架2.动簧片3.动断静簧片4.触头5.动簧片6.动合静簧片7.衔铁8.挡圈9.底支架图1 三维软件模型2.建立模型后,生成Parasolid格式,保存于ADAMS的工作目录下.3.导入ADAMS中,并定义各部件的材料属性,同时ADAMS自动计算出转动惯量和质量.对各个部件进行约束.在这里对结构进行了简化,忽略了电学的干扰,只考虑机械结构之间的相互关系.首先用固定副把顶支架和底支架与固定在一起,然后固定动簧片,动断静簧片,动合静簧片,还要把触头与衔铁固定在一起,最后在衔铁与底支架之间施加旋转副,由于触头与动簧片接触,动合静簧片,动断静簧片之间也产生接触力,因此在这些部件之间也要定义接触.因为这次主要是为了验证柔性体的仿真,忽略了电磁学问题,同时也可忽略掉顶支架和底支架,因此把顶支架和底支架设置为哑物体,并对部分构件设为透明如图2所示.经简化后,在旋转副上加正弦驱动力来模拟电磁铁产生的吸附力,驱动力为9.5d *sin(1200* time),再进行仿真.设置仿真时间为0.015s,步长为0.000025s,由于动簧片为刚性体,当触头与动簧片接触时就会发生错误,当时间步长足够小时,也会发生穿透现象.1.衔铁2.动簧片3.动合静簧片4.动断静簧片5.触头6.衔铁7.底支架图2 简化后的模型4.把关键部件改变为柔性体。
ANSYS与ADAMS联合柔性仿真详细步骤下面是ANSYS与ADAMS联合柔性仿真的详细步骤:第一步:建立ANSYS模型1.根据系统的实际情况,使用ANSYS软件建立结构有限元模型。
在建立模型时,需要考虑结构的几何形状、材料特性、边界条件等。
2.对模型进行网格划分,确保模型的几何形状能够被分割成小单元。
划分网格时,需要根据模型的复杂程度和计算资源的限制进行权衡。
3.为模型定义材料属性,包括弹性模量、泊松比、密度等。
这些参数可以根据实际的材料测试数据或者经验值进行定义。
第二步:进行结构有限元分析1.定义加载条件,包括施加在模型上的力、力矩、温度等。
这些加载条件可以来自实际的工作环境或者通过其他仿真方法得到。
2.进行结构有限元分析,求解模型的应力、应变、位移等机械响应。
ANSYS提供了许多求解器,可以根据具体的问题选择合适的求解器。
3.对分析结果进行后处理,包括查看位移、应变云图、应力云图等。
这些结果可以用于评估模型的性能以及设计的合理性。
第三步:导出ANSYS模型至ADAMS1.将ANSYS的分析结果导出至ADAMS软件。
可以选择导出位移、应变等关键结果,并将其作为ADAMS仿真模型的输入。
2.导出过程中需要注意单位的一致性,确保ANSYS模型的尺度与ADAMS模型相匹配,以便于后续的关联分析。
第四步:建立ADAMS模型1.在ADAMS中建立多体动力学模型。
根据系统的实际情况,可以使用ADAMS软件提供的部件库,选择合适的刚体、活动副等进行建模。
2.在模型中引入柔性部件,即ANSYS导出的有限元结果,并与刚体连接起来。
确保柔性部件的位置、方向、刚度等参数与ANSYS模型相匹配。
第五步:进行多体动力学分析1.定义加载条件,包括施加在模型上的力、力矩、速度等。
根据实际的工作环境,可以模拟不同的工况进行分析。
2.进行多体动力学分析,求解模型的运动学和动力学响应。
ADAMS提供了各种求解器和控制算法,可以根据具体的问题选择合适的求解方法。
机器人设计与仿真基于Adams与Matlab的案例分析与实现机器人设计与仿真是现代机器人工程领域的核心内容。
这个系列课程旨在帮助学习者掌握使用Adams和Matlab工具进行机器人设计、建模、控制算法开发和仿真分析的技能。
通过理论讲解和实践案例分析,学习者将了解机器人设计的基本原理和方法,并学会将其应用于实际机器人项目中。
课程共分为:基础篇以机械结构中常见机构为仿真示例,其中包含了平面四杆机构、凸轮机构、滑轮组、带传动、齿轮传动等,讲解了Adams/View的操作技巧和实战运用。
学员可:1、掌握Adams/View仿真基本流程。
2、掌握机械结构中常见机构的工作原理。
3、熟练Adams/View在机械系统仿真时常用模块及功能。
4、掌握在Adams中建立柔性体的流程。
5、熟悉Adams和MATLAB机电联合仿真技巧。
强化篇结合串联机器人、并联机器人、特种机器人及机器人控制系统的相关理论知识,运用MATLAB及Adams软件的编程和动力学仿真的强大功能,快速入门机器人领域。
学员可:1、熟悉机器人相关理论知识;2、掌握机器人基础性分析流程3、掌握MATLAB和Adams软件联合验证仿真以串联机器人作为机器人领域的入门,本小节主要以串联机器人的运动学建模、雅可比矩阵及奇异性分析、工作空间分析、轨迹规划及动力学分析为核心内容,通过理论建模,MATLAB编程计算,Adams仿真求解验证的方式,帮助各位学员更加深入理解机器人的基础理论知识。
以并联机器人中两种常见机器人(Delta、Stewart)为主要研究对象,讲解了并联机器人的基础性理论知识和仿真流程,同时,对Stewart平台通过MATLAB编程的方式进行了结构优化,通过Adams的仿真验证了优化结果。
简介特种机器人的发展状况,以四足机器人为研究对象,对其进行了运动学分析和关节空间轨迹规划,在通过MATLAB和Adams联合仿真的方式实现了四足机器人的行走。
Adams柔性体仿真后查看应力应变首先说明,如果想查看柔性体应力计应变,则mnf文件中必须包含模态应力及应变信息。
下面是我建立的模型。
一个简单的四连杆机构,连杆是柔性体。
进行仿真后进入后处理界面。
首先在ADAMS/View中加载ADAMS/Durability模块,这是柔性体后处理(针对应力及应变的后处理)画曲线和观察动画的前提。
(1)画曲线通过以下路径“Tool-->>Plugin Manager”,在对话框中“Load”一栏对应的ADAMS/Durability打勾。
Step1 查看仿真过程应力及应变最大值以及相应的节点号,以便于下面输出曲线时选择相应的节点。
在主菜单Durability一栏下选择Hot Spots Table,出现Hot Spots Information 对话框,通过此对话框,可以得出得到在仿真过程中各个节点的最大应力。
下图显示仿真过程中最大mises应力。
Step2 进入后处理模块ADAMS/Postprocessor在主菜单Durability一栏下选择Nodal Plot,出现以下对话框。
在Flexible Body 一栏选择柔性体名称,在Select Node List一栏输入想要查看的节点编号,选择Stress或Strain等相关选项,点击确定。
Step3 在窗口区,鼠标右键选择load plot进入画曲线窗口。
在Source选项中选择“Result Sets”,result set里面选择“**_STRESS”,进一步往下选择所需要的输出即可以画曲线了。
如上图所示则画出了我建立的模型中node_371的Mises应力时间曲线。
见下图(2)观察动画功能在加载ADAMS/Durability模块后在窗口区右键选择Load Animation进入动画现实界面。
在下端Contour Plots 选项卡下选择“Contour Plot Type”选项,根据需要选择Deformation (变形)或者Von Mises Stress(米塞斯应力)等等。
ANSYS与ADAMS进行联合柔性仿真基本思路:在ANSYS进行.mnf文件输出,然后把输出的.mnf文件输入ADAMS,进行零件更换。
然后在ADAMS 进行加载约束,仿真,查看结果。
软件:ANSYS10,ADAMS 2007 R3具体步骤:一ANSYS输出.mnf柔性文件1.1 建立单元单元1:solid45 或者其他3D单元单元2:MASS21,此单元只用于连接点单元设置弹性模量,泊松比,密度3个参数1.2导入模型(.x_t)或者建立模型完成后,创建连接点,ANSYS要求必须是2或者2个以上的连接点创建连接点:如下图,在下面2个圆柱孔的中心,注意是圆柱体的中心,不是某个面得中心,创建2个keypoints。
具体方法,看个人而定。
1.3 划分单元对体用3D单元划分,我选用meshtool方法接下来设置real constants,这个参数设置,一定要到等到3D网格划分完后再设置对MASS21 进行设置。
然后对连接点,即keypoints进行单元划分:先设置keypoints 属性,如下然后划分单元,用meshtool, 对keypoints划分单元,结果如下如下图1.4建立刚性区域刚性区域都是节点=连接节点+刚柔接触的面上所有节点在ANSYS里面,这一步,连接点为主节点,刚柔接触面上的所有节点为从节点首先得按如下2个图片进行主节点和从节点节点组合。
(或者用循环语句也行)1.4.1建立主节点component选择1个主节点,即连接节点。
接下来Cname 命名就ponet就这样创建完毕。
按照此方法,对另外一个连接点,建立一个componet。
在这个例子里,命名为m2.1.4.2建立从节点componet首先选中2个圆柱面。
(对1个圆柱孔操作)然后选择这2个面上所有节点,操作如下:点击OK,就可以了。
接下来命名好,就完成从节点的componet按照上述方法,对另外一个连接点和圆柱面上的节点,建立2个componet1.4.3组装主节点和从节点component,形成1个ASSEMBL Y按照这个方法,对另外一对主节点和从节点component进行组装。
ADAMS虚拟实验ADAMS(Automatic Dynamic Analysis of Mechanical System)是Mechanical Dynamics Inc.开发的一个多体动力学软件,在机械领域得到广泛应用(其中汽车行业使用率为43%)。
针对汽车工业,MDI和大型汽车制造企业联合开发了ADAMS/CAR、ADAMS/DRIVER等专用模块,大大方便了车辆零部件、总成以及整车的建模和仿真工作,并提高了仿真计算精度。
i.ADAMS的主要功能ADAMS可以对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
ADAMS/FLEX将多体动力学建模方法与大位移、非线性分析求解功能相结合,并且提供与其它CAE软件,如有限元分析软件ANSYS等的集成接口,可以方便的考虑零部件的弹性特性,建立多体动力学模型。
用ADAMS/Car,车辆工程师们可以将设计好的车辆置于不同的路况条件下进行相同的测试,且仅用比原来在真实的实验室或者试验场地上测试少得多的时间。
ii.ADAMS的主要特点以下是对在进行车辆建模和分析时最有可能用到的功能、模块的简单介绍。
ADAMS软件提供了四种用于动力学仿真的轮胎模型,即Fiala模型,UA模型,Smithers模型,用户自定义模型。
轮胎侧偏特性、垂直特性、外倾特性等参数可通过平板式轮胎静力学试验台测定。
ADAMS/Flex提供ADAMS与有限元软件之间的双向数据交换接口,利用它与ANSYS、MSC/NASTRAN、ABAQUS、I-DEAS等软件的接口,可以方便的考虑零部件的弹性特性,建立多体动力学模型,以提高系统的仿真精度。
ADAMS/Controls可以通过简单的继电器、逻辑与非门、阻尼线圈等建立简单的控制机构,或者利用在通用控制系统软件(如:MATLAB、MATRIX、EASY5)中建立的控制系统框图,建立包括控制系统、液压系统、气动系统和运动机械系统的仿真模型。
一.ADAMS软件简介 (2)1.1ADAMS软件概述 (2)1.2用户界面模块(ADAMS/View) (3)1.3求解器模块(ADAMS/Solver) (5)1.4后处理模块(ADAMS/PostProcessor) (6)1.5控制模块(ADAMS/Controls) (8)二.典型机器人虚拟实验 (9)2.1串联机器人 (9)2.1.1 运动学分析 (9)2.1.2 动力学分析 (14)2.1.3 轨迹规划 (17)2.1.4 基于ADAMS和MATLAB的联合运动控制 (22)一.ADAMS软件简介虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的商用软件,由美国MDI (Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。
ADAMS集建模、计算和后处理于一体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以用这两个模块来完成,另外在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌入模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、火车模块ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌入模块如振动模块ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex等[3]。
1.1ADAMS软件概述ADAMS是以计算多体系统动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利用它可以建立复杂机械系统的运动学和动力学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。
如果在产品的概念设计阶段就采取ADAMS进行辅助分析,就可以在建造真实的物理样机之前,对产品进行各种性能测试,达到缩短开发周期、降低开发成本的目的。
ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems)该软件是美国MDI公司(Mechnical Dynamics Inc.)开发的虚拟样机分析软件。
目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。
根据1999年机械系统动态分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元、占据了51%的份额。
ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
ADAMS一方面是虚拟样机分析的应用软件,用户可以运用该软件非常方便地对虚拟机械系统进行静力学、运动学和动力学分析。
另一方面,又是虚拟样机分析开发工具,其开放性的程序结构和多种接口,可以成为特殊行业用户进行特殊类型虚拟样机分析的二次开发工具平台。
ADAMS软件有两种操作系统的版本:UNIX版和Windows NT/2000版。
1.2用户界面模块(ADAMS/View)ADAMS/View是ADAMS系列产品的核心模块之一,采用以用户为中心的交互式图形环境,将图标操作,菜单操作,鼠标点击操作与交互式图形建模,仿真计算,动画显示,优化设计,X-Y曲线图处理,结果分析和数据打印等功能集成在一起。
ADAMS/View采用简单的分层方式完成建模工作。
采用Parasolid内核进行实体建模,并提供了丰富的零件几何图形库,约束库和力/力矩库,并且支持布尔运算,支持FORTRAN/77和FORTRAN/90中的函数。
除此之外,还提供了丰富的位移函数,速度函数,加速度函数,接触函数,样条函数,力/力矩函数,合力/力矩函数,数据元函数,若干用户子程序函数以及常量和变量等[3]。
自9.0版后,ADAMS/View采用用户熟悉的Motif界面(UNIX系统)和Windows界面(NT系统),从而大大提高了快速建模能力。
在ADAMS/View 中,用户利用TABLE EDITOR,可像用EXCEL一样方便地编辑模型数据,同时还提供了PLOT BROWSER和FUNCTION BUILDER工具包。
DS(设计研究),DOE (实验设计)及OPTIMIZE(优化)功能可使用户方便地进行优化工作。
ADAMS/View有自己的高级编程语言,支持命令行输入命令和C++语言,有丰富的宏命令以及快捷方便的图标,菜单和对话框创建和修改工具包,而且具有在线帮助功能。
ADAMS/View模块界面如图1.1所示。
图1.1 ADAMS/View界面ADAMS/View新版采用了改进的动画/曲线图窗口,能够在同一窗口内可以同步显示模型的动画和曲线图;具有丰富的二维碰撞副,用户可以对具有摩擦的点-曲线,圆-曲线,平面-曲线,以及曲线-曲线,实体-实体等碰撞副自动定义接触力;具有实用的Parasolid输入/输出功能,可以输入CAD中生成的Parasolid文件,也可以把单个构件,或整个模型,或在某一指定的仿真时刻的模型输出到一个Parasolid文件中;具有新型数据库图形显示功能,能够在同一图形窗口内显示模型的拓扑结构,选择某一构件或约束(运动副或力)后显示与此项相关的全部数据;具有快速绘图功能,绘图速度是原版本的20倍以上;采用合理的数据库导向器,可以在一次作业中利用一个名称过滤器修改同一名称中多个对象的属性,便于修改某一个数据库对象的名称及其说明内容;具有精确的几何定位功能,可以在创建模型的过程中输入对象的坐标,精确地控制对象的位置;多种平台上采用统一的用户界面,提供合理的软件文档;支持Windows NT平台的快速图形加速卡,确保ADAMS/View的用户可以利用高性能OpenGL图形卡来提高软件的性能;命令行可以自动记录各种操作命令,进行自动检查。
1.3求解器模块(ADAMS/Solver)ADAMS/Solver是ADAMS系列产品的核心模块之一,是ADAMS产品系列中处于心脏地位的仿真器。
该软件自动形成机械系统模型的动力学方程,提供静力学,运动学和动力学的解算结果。
ADAMS/Solver有各种建模和求解选项,以便精确有效地解决各种工程应用问题。
ADAMS/Solver可以对刚体和弹性体进行仿真研究。
为了进行有限元分析和控制系统研究,用户除要求软件输出位移,速度,加速度和力外,还可要求模块输出用户自己定义的数据。
用户可以通过运动副,运动激励,高副接触,用户定义的子程序等添加不同的约束。
用户同时可求解运动副之间的作用力和反作用力,或施加单点外力。
ADAMS/Solver新版中对校正功能进行了改进,使得积分器能够根据模型的复杂程度自动调整参数,仿真计算速度提高了30%;采用新的S12型积分器(Stabilized Index 2 intergrator),能够同时求解运动方程组的位移和速度,显著增强积分器的鲁棒性,提高复杂系统的解算速度;采用适用于柔性单元(梁,衬套,力场,弹簧-阻尼器)的新算法,可提高S12型积分器的求解精度和鲁棒性;可以将样条数据存储成独立文件使之管理更加方便,并且spline语句适用于各种样条数据文件,样条数据文件子程序还支持用户定义的数据格式;具有丰富的约束摩擦特性功能,在Translational,Revolute,Hooks,Cylindrical,Spherical,Universal等约束中可定义各种摩擦特性。
1.4后处理模块(ADAMS/PostProcessor)MDI公司开发的后处理模块ADAMS/Postprocessor,用来处理仿真结果数据,显示仿真动画等。
既可以在ADAMS/View环境中运行,也可脱离该环境独立运行。
后处理的操作界面如图 1.2所示。
ADAMS/PostProcessor的主要特点是:采用快速高质量的动画显示,便于从可视化角度深入理解设计方案的有效性;使用树状搜索结构,层次清晰,并可快速检索对象;具有丰富的数据作图,数据处理及文件输出功能;具有灵活多变的窗口风格,支持多窗口画面分割显示及多页面存储;多视窗动画与曲线结果同步显示,并可录制成电影文件;具有完备的曲线数据统计功能:如均值,均方根,极值,斜率等;具有丰富的数据处理功能,能够进行曲线的代数运算反向,偏置,缩放,图1.2 ADAMS/PostProcessor界面编辑和生成Bode图等;为光滑消隐的柔体动画提供了更优的内存管理模式;强化了曲线编辑工具栏功能;能支持模态形状动画,模态形状动画可记录的标准图形文件格式有:*.gif,*.jpg,*.bmp,*.xpm,*.avi 等;在日期,分析名称,页数等方面增加了图表动画功能;可进行几何属性的细节的动态演示。
ADAMS/PostProcessor的主要功能是为观察模型的运动提供了所需的环境,用户可以向前,向后播放动画,随时中断播放动画,而且可以选择最佳观察视角,从而使用户更容易地完成模型排错任务;为了验证ADAMS仿真分析结果数据的有效性,可以输入测试数据,并测试数据与仿真结果数据进行绘图比较,还可对数据结果进行数学运算,对输出进行统计分析;用户可以对多个模拟结果进行图解比较,选择合理的设计方案;可以帮助用户再现ADAMS中的仿真分析结果数据,以提高设计报告的质量;可以改变图表的形式,也可以添加标题和注释;可以载入实体动画,从而加强仿真分析结果数据的表达效果;还可以实现在播放三维动画的同时,显示曲线的数据位置,从而可以观察运动与参数变化的对应关系。
1.5控制模块(ADAMS/Controls)ADAMS/Controls是ADAMS软件包中的一个集成可选模块。
在ADAMS/Controls中,设计师既可以通过简单的继电器,逻辑与非门,阻尼线圈等建立简单的控制机构,也可利用通用控制系统软件(如MATLAB,MATRIX,EASY5)建立的控制系统框图,建立包括控制系统,液压系统,气动系统和运动机械系统的仿真模型。
在仿真计算过程中,ADAMS采取两种工作方式:其一,机械系统采用ADAMS解算器,控制系统采用控制软件解算器,二者之间通过状态方程进行联系;其二,利用控制软件书写描述控制系统的控制框图,然后将控制框图提交给ADAMS,应用ADAMS解算器进行包括控制系统在内的复杂机械系统虚拟样机的同步仿真计算。