自控大作业——超前滞后校正
- 格式:docx
- 大小:93.72 KB
- 文档页数:8
自动控制原理大作业已知单位反馈控制系统如图所示,其中0()(1)KG s s s =+。
1、试用频率法设计串联超前校正网络()c G s ,满足:单位斜坡输入时,位置输出稳态误差19ss e =,开环截止频率 4.5/crad s ω''=,相角裕度50γ''≥,请写出校正具体步骤: 解:1.求开环增益K 传递函数为:0()(1)KG s s s =+ 此系统为为Ⅰ型系统,且系统稳定,故由稳态误差911e ss ==K知:K=9校正前系统传递函数为 )()(1s s 9s o +=G(1)根据校正前系统Bode 图,确定校正前系统相角裕度和开环截止频率:0w c =)(L0w 9lg202c= s /rad 3w c =43.18arctanw -90-180)w (180r c c o ==+=ϕ(2)计算校正网络的参数a 和τ:已知开环截止频率 4.5/crad s ω''=取s /rad 5.4w w c m="= 2co w 9lg 20lga 10-5.4"==)(L 06.5a = 0988.006.5*5.41a *w 1m ===τ 10988.01s 5.01s 1s a s c ++=++=s G ττ)((3)验算校正后的性能指标是否满足设计要求:)1s 0988.0)(1s (s )1s 5.0(9)s ()s ()s (c o +++==G G G6.5497.23-47.77-04.6690)w *0988.0(arctan -arctanw -90-)w *5.0(arctan 180)w (180r c cc c =+="""+="+=''ϕ 满足设计要求。
2、用MATLAB 画出校正前系统、校正装置和校正后系统的Bode 图:-100100M a g n i t u d e (d B)10-210-110101102103-180-135-90-45045P h a s e (d e g)Bode DiagramFrequency (rad/sec)MATLAB 程序:G1=tf(9,[1,1,0]);G2=tf(9*[0.5,1],conv([1,1,0],[0.0988,1])); G3=tf([0.5 1],[0.0988 1]) bode(G1) hold bode(G2,'--') hold bode(G3)3、用MATLAB 绘制校正前和校正后系统的单位阶跃响应图,并分析两个系统不同的动态性能指标(超调量、调节时间等):0246810120.20.40.60.811.21.41.6Step ResponseTime (sec)A m p l i t u d eMATLAB 程序:G1=tf(9,[1,1,0]);G2=tf(9*[0.5,1],conv([1,1,0],[0.0988,1])); G3=tf([0.5 1],[0.0988 1]) figureG1_c=feedback(G1,1) G2_c=feedback(G2,1) step(G1_c) hold step(G2_c,'--')动态性能分析: ● 校正前:)()(1s s 9s o +=G9s s 9s 20++=)(ϕ 3w n = 167.061w 21n ≈==ζ%75.58%100*e%100*e%22167.0-1167.0*14.3--1-===ζπζσs06.1167.0-1*314.3-1*w t 22n p ===ζπs986.63*167.05.3w *5.3t n s ===ζ● 校正后:%171.01.0-1.17%=σs648.0t p ≈分析:加入串联超前校正装置后,动态性能中系统超调量下降,稳定性变好,调节时间、峰值时间减小,快速性变好。
定常系统的频率法超前校正1问题描述用频率法对系统进行校正,是利用超前校正网络的相位超前特性来增大系统的相位裕量,从而提高系统的稳定性,致使闭环系统的频带扩展,以达到改善系统暂态响应的目的。
但系统频带的加宽也会带来一定的噪声干扰,为了系统具有满意的动态性能,高频段要求幅值迅速衰减,以减少噪声影响。
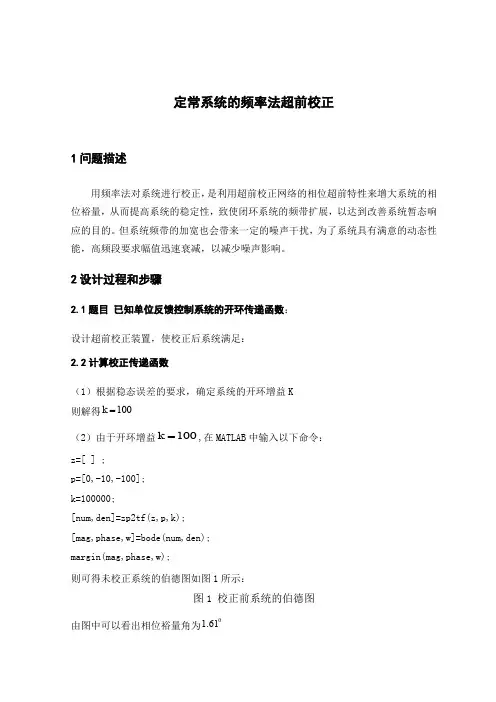
2设计过程和步骤2.1题目 已知单位反馈控制系统的开环传递函数:设计超前校正装置,使校正后系统满足:2.2计算校正传递函数(1)根据稳态误差的要求,确定系统的开环增益K则解得100k =(2)由于开环增益100k =,在MATLAB 中输入以下命令:z=[ ] ;p=[0,-10,-100];k=100000;[num,den]=zp2tf(z,p,k);[mag,phase,w]=bode(num,den);margin(mag,phase,w);则可得未校正系统的伯德图如图1所示:图1 校正前系统的伯德图由图中可以看出相位裕量角为061.1(3)谐振峰值为%0.161 1.250.4r M σ-=+=, 给定系统的相位裕量值1arcsin()53.1301r M γ==,由于未校正系统的开环对数幅频特性在剪切频率处的斜率为40/db dec -,一般取005~10ε=,在这里取为10,超前校正装置应提供的相位超前量φ,即:5201.611061.11301.531=+-=+-==εγγφφmε是用于补偿因超前装置的引入,使系统的剪切频率增大而增加的相角迟后量。
(4)根据所确定的最大相位超前角m φ,按下式计算相应的α(5)计算校正装置在m w 处的幅值110log α。
由于校正系统的对数幅频特性图,求得其幅值为110log α-处的频率,该频率m φ就是校正后系统的开环剪切频率c w ,即76.80==m c ωω(6)确定校正网络的转折频率和1ω、2ω4946.200644.076.8011=⨯===αωωm T ,(7)画出校正后系统的伯德图,并验算相应的相位裕量是否满足要求?如果不满足,则改变ε值,从步骤(3)开始重新进行计算。
滞后-超前校正——课程设计一、设计目的:1. 了解控制系统设计的一般方法、步骤。
2. 掌握对系统进行稳定性的分析、稳态误差分析以及动态特性分析的方法。
3. 掌握利用MATLAB 对控制理论内容进行分析和研究的技能。
4. 提高分析问题解决问题的能力。
二、设计内容与要求:设计内容:1. 阅读有关资料。
2. 对系统进行稳定性分析、稳态误差分析以及动态特性分析。
3. 绘制根轨迹图、Bode 图、Nyquist 图。
4. 设计校正系统,满足工作要求。
设计条件:1、被控制对象的传递函数是m m 1m 2012mn sn 1n 2012nb s b s b s b ()a s a a s a G S ----+++⋯+=+++⋯+(n≥m)2、参数a0,a1,a2,...an和b0,b1,b2,...bm因小组而异。
设计要求:1. 能用MATLAB 解复杂的自动控制理论题目。
2. 能用MATLAB 设计控制系统以满足具体的性能指标。
3. 能灵活应用MATLAB 的CONTROL SYSTEM 工具箱和SIMULINK 仿真软件,分析系统的性能。
三、设计步骤:1、自学MATLAB软件的基本知识,包括MATLAB的基本操作命令。
控制系统工具箱的用法等,并上机实验。
2、基于MALAB用频率法对系统进行串联校正设计,使其满足给定的领域性能指标。
要求程序执行的结果中有校正装置传递函数和校正后系统开环传递函数,校正装置的参数T,α等的值。
已知开环传递函数为G(S)= 0(2)(40)k s s s ++,使用频率法设计串联滞后—超前校正装置,使系统的相角裕度大于等于40°,静态速度误差系数等于20。
校正前根据上式可化简G(S)= 00.0125(0.51)(0.0251)k s s s ++,所以公式G(S)=20(0.51)(0.0251)s s s ++,所以=1,则c w = 6.1310,相角裕度γ为9.3528。
串联超前校正和滞后校正的不同之处在控制系统中,超前校正和滞后校正是两种常见的校正方法。
它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
本文将从理论和实践两个方面,分别探讨串联超前校正和滞后校正的不同之处。
一、理论分析1. 超前校正超前校正是指在控制系统中,通过提前控制信号的相位,使得系统的相位裕度增加,从而提高系统的稳定性和响应速度。
具体来说,超前校正是通过在控制信号中加入一个比例项和一个积分项,来提高系统的相位裕度。
这样,系统就能更快地响应外部干扰和变化,从而提高系统的性能。
2. 滞后校正滞后校正是指在控制系统中,通过延迟控制信号的相位,使得系统的相位裕度减小,从而提高系统的稳定性和抗干扰能力。
具体来说,滞后校正是通过在控制信号中加入一个比例项和一个微分项,来减小系统的相位裕度。
这样,系统就能更好地抵抗外部干扰和变化,从而提高系统的性能。
二、实践应用1. 超前校正超前校正在实践中的应用非常广泛。
例如,在电力系统中,超前校正可以用来提高电力系统的稳定性和响应速度。
在机械控制系统中,超前校正可以用来提高机械系统的精度和响应速度。
在化工生产中,超前校正可以用来提高化工生产的稳定性和生产效率。
2. 滞后校正滞后校正在实践中的应用也非常广泛。
例如,在飞行控制系统中,滞后校正可以用来提高飞行器的稳定性和抗干扰能力。
在汽车控制系统中,滞后校正可以用来提高汽车的稳定性和安全性。
在医疗设备中,滞后校正可以用来提高医疗设备的精度和稳定性。
总之,串联超前校正和滞后校正是两种常见的校正方法,它们都是为了提高系统的稳定性和性能而采取的措施。
然而,它们的实现方式和效果却有很大的不同。
在实践中,我们需要根据具体的应用场景和需求,选择合适的校正方法,以达到最佳的控制效果。

自动控制原理题目自动控制原理大作业专业精密仪器专业学号学生指导教师一、设计任务书已知某控制系统的开环传递函数如下,试设计串联校正装置, )101.0)(11.0(1)(++=s s s s G技术参数和设计要求: 1. 增益Kv ≥100; 2. 相角裕度40≥γ3. 截止角频率s rad /20≥ω二.设计过程人工设计过程包括计算数据、系统校正前后及校正装置的Bode 图(在半对数坐标纸上)、校正装置传递函数、校正装置电路参数、性能指标验算数据。
1.设计过程 开环增益K 可选取K=100。
开环传函)101.0)(11.0(100)(++=s s s s G绘制Bode 图可知s rad c /1.300=ω d e g58.10=γ。
需进行串联滞后超前校正,题目中要求s rad /20≥ω,可以取c ω=25rad/s 。
现按s rad c/552==ωω校正装置传函)1)(1()1)(1()(1212s T s T s aT s bT s G c ++++=式中2.0122==ωbT ,1.01=aT ,b a 1= 由Bode 图知a=4.5,b=0.22222.因此,校正装置传函)022.01)(9.01()1.01)(2.01()(s s s s s G c ++++=校正后系统开环传函)022.01)(9.01)(101.0()2.01(100)(s s s s s s G e ++++=2.Simulink 仿真框图3.Matlab 程序 A 、校正前num=100;den=conv([1,0],conv([0.1,1],[0.01,1]));g=tf(num,den) margin(num,den)cl=feedback(g,1);step(cl) t=0:0.1:10;u=t;lsim(cl,u,t) rlocus(num,den)nyquist(num,den)Bode 图单位阶跃响应-150-100-50050100M a g n i t u d e (d B )10-110101102103104-270-225-180-135-90P h a s e (d e g )Bode DiagramGm = 0.828 dB (at 31.6 rad/s) , P m = 1.58 deg (at 30.1 rad/s)Frequency (rad/s)单位斜坡响应 根轨迹图Nyquist 图024681012140.20.40.60.811.21.41.61.82Step ResponseTime (seconds)A m p l i t u de-500-400-300-200-1000100200-400-300-200-100100200300400Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s-1)24681012345678910Linear Simulation ResultsTime (seconds)A m p l i t u d eB 、校正后 Simulink 框图num=100;den=conv(conv([1,0],[0.1,1]),[0.01,1]);g1=tf(num,den);g2=tf([0.2 1],[0.9 1]); g3=tf([0.1 1],[0.02222 1]);sope=g1*g2*g3;margin(sope) cl=feedback(sope,1);step(cl)Bode 图-12-10-8-6-4-20-200-150-100-5050100150200Nyquist DiagramReal AxisI m a g i n a r y A x i s单位阶跃响应单位斜坡响应 根轨迹图-150-100-50050100M a g n i t u d e (d B )10-210-110101102103104-270-225-180-135-90P h a s e (d e g )Bode DiagramGm = 15.1 dB (at 62.7 rad/s) , P m = 43.4 deg (at 20.4 rad/s)Frequency (rad/s)00.10.20.30.40.50.60.70.20.40.60.811.21.4Step ResponseTime (seconds)A m p l i t u d e01234567891012345678910Linear Simulation ResultsTime (seconds)A m p l i t u d e-500-400-300-200-1000100200-400-300-200-100100200300400Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)校正前后及校正函数的幅频特性曲线-150-100-50050100M a g n i t u d e (d B )10-210-110101102103104-270-180-90090P h a s e (d e g )Bode DiagramGm = 15.1 dB (at 62.7 rad/s) , P m = 43.4 deg (at 20.4 rad/s)Frequency (rad/s)uncompensatedcompensator compensated4.校正装置电路参数 校正函数)022.01)(9.01()1.01)(2.01()(s s s s s G c ++++=,电路传递函数1])1([)1)(1()()(212122121++++++=s T R R T s T T s T s T s U s U sr sc由s C R T 1.0111==,s C R T 2.0222==得R1=1k ,C1=0.1mF ,R2=6.2k ,C2=0.03mF 。
实 验 报 告学号:201110401262 姓名:陈院梅 成绩:一、 实验名称:频率法串联校正二、 实验目的:(1) 理解串联超前校正、串联滞后校正、串联超前-滞后校正的作用。
(2) 掌握串联超前校正、串联滞后校正、串联超前-滞后校正的用途。
(3) 熟悉频率法校正的方法和过程。
(4) 熟悉利用matlab 进行计算机辅助设计和分析的方法。
三、 实验要求:(1) 一人一机,独立完成实验内容 。
(2) 根据实验结果完成实验报告,并用A4纸打印后上交。
四、 时间:2013年11月21日 五、 地点:信自楼234实验报告:一、设一单位负反馈控制系统,如果控制对象的传递函数为:)80)(4()(++=s s s Ks G p ,试设计一个串联超前校正装置。
要求:①相角裕度≥45。
;②当系统的输入信号是单位斜坡信号时,稳态误差e ss ≤0.04;③取C=1μF 时,确定该串联超前校正装置的元件数据,并画出该装置的结构图; ④绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。
结果分析: 由图可见,未校正系统幅值裕度为10.5db ,对应的频率为17.9rad/s 相角裕度为15.9db 相应的频率为9.57rad/s 。
相角裕度离要求甚远。
校正后系统幅值裕度为25.6db ,对应的频率为44.2rad/s 相角裕度为45.0239相应的频率为9.62rad/s,校正后相角裕量满足要求,且串联超前校正增大了系统相位裕量和增益裕量,系统的剪切频率增大,系统的快速性得到提高,即性能指标提高。
由运行结果可以确定该串联超前——滞后校正装置的元件数据,即1R CT =、12=1R R ββ- 标称化得: R1=14.6kΩ,R2=2.831kΩ,并由此可画出无源超前网络图。
二、设一单位负反馈控制系统,其控制对象的传递函数为:)80)(4()(++=s s s Ks G p ,试设计一个串联滞后校正装置。
自控课设MATLAB超前滞后校正武汉理工大学《自动控制原理》课程设计说明书课程设计任务书学生姓名:张弛专业班级:电气1002班指导教师:刘志立工作单位:自动化学院题目: 用MATLAB进行控制系统的滞后-超前校正设计初始条件:已知一单位反馈系统的开环传递函数是G(s)?Ks(s?1)(s?2)要求系统的静态速度误差系数Kv?10S?1,??45?。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 MATLAB作出满足初始条件的最小K值的系统伯德图,计算系统的幅值裕量和相位裕量。
2、前向通路中插入一相位滞后-超前校正,确定校正网络的传递函数。
3、用MATLAB画出未校正和已校正系统的根轨迹。
4、用Matlab对校正前后的系统进行仿真分析,画出阶跃响应曲线,计算其时域性能指标。
5、课程设计说明书中要求写清楚计算分析的过程,列出MATLAB程序和MATLAB输出。
说明书的格式按照教务处标准书写。
时间安排:任务审题、查阅相关资料分析、计算编写程序撰写报告论文答辩时间(天) 1 3 1 2 0.5指导教师签名: 年月日系主任(或责任教师)签名: 年月日武汉理工大学《自动控制原理》课程设计说明书目录摘要 (3)1基于频率响应法校正设计概述 (4)2串联滞后-超前校正原理及步骤 (5)2.1滞后超前校正原理 (5)2.2滞后-超前校正的适用范围 (6)2.3串联滞后-超前校正的设计步骤 ........................................... 6 3串联滞后-超前校正的设计 (7)3.1待校正系统相关参数计算及稳定性判别 (7)3.1.1判断待校正系统稳定性 (7)3.1.2绘制待校正系统的伯德图 (8)3.1.3绘制待校正系统的根轨迹图 (9)3.1.4绘制待校正系统的单位阶跃响应曲线 (10)3.1.5利用SIMULINK进行控制系统建模仿真 (11)3.2滞后超前-网络相关参数的计算 (12)3.3对已校正系统的验证及稳定性分析 (15)3.3.1绘制已校正系统的伯德图 (15)3.3.2判断已校正系统的稳定性 (16)3.3.3绘制已校正系统的根轨迹图 (17)3.3.4绘制已校正系统的单位阶跃响应曲线 (18)3.3.5利用SIMULINK进行控制系统建模仿真 (19)3.3.6串联滞后-超前校正设计小结 ...............................................20 4心得体会 .................................................................21 参考文献 ...................................................................21 附录 (22)武汉理工大学《自动控制原理》课程设计说明书摘要随着科学技术的不断向前发展,人类社会的不断进步。
关于⾃动控制频域相位特性滞后与超前的概念1.⾃动控制中,PD可以实现超前校正、PI可以实现滞后校正。
在频域分析中总能看见说相位超前与滞后的概念,我⼀直没太理解,在这⾥说⼀说我的疑惑。
第⼀,时间域中的超前与滞后是什么意思,举个例⼦,阶跃相应中的调节时间能理解为滞后时间吗,如果能那么超前⼜应该怎么理解呢,难道是说还没输⼊输出就有了吗?第⼆,频域中的超前与滞后到底是什么概念,与时间域中的时间超前与滞后是⼀个概念吗?(我的理解他们之间是没有区别的,只是差⼀个⾓频率的关系,相位除以⾓频率不就是时间吗)。
第三,我们都知道微分环节具有相位超前的特性,他的相位超前和纯时间超前环节e的sT次⽅有什么区别吗?恳求⼤家解除我的疑惑答:(1)⾸先楼主对这些基础问题的研究真是令⼈佩服。
这些问题看着都眼熟,可要是真正解释,还真是不知道怎么说,我想可能是⼀开始学时就对概念掌握的不够,以后再很少去思考这些,更是变得不懂了。
真是⾃惭形秽啊,只能对部分进⾏讨论,⼀家之⾔。
我所理解的超前和滞后是某个环节或对象所具有的⼀个性质,时域中超前的见得不多,滞后的倒是⽐⽐皆是。
⼀个微分环节算是超前的例⼦的话,那么对应的积分环节可以理解为滞后了,典型的滞后环节应该是⼀阶惯性环节或者纯滞后exp(-Ts)。
频域中的超前和滞后是输出信号相对于输⼊信号的相⾓⽽⾔,经典的例⼦就是电阻和电容组成的RC⽹络。
这个和时域中应该是有对应的。
研究相位超前或纯超前的见得不多,对于滞后和纯滞后应该是不⼀样的。
惯性环节应该也算滞后,它和exp(-Ts)并不⼀样,但是后者展开式可以近似写成⼀阶惯性环节。
频域超前和滞后⼀般在校正中出现或者说应⽤的⽐较多吧!(2)客⽓话就不说了,呵呵说说我的理解⾸先我们通常说的时域下的特性⽐如我提到的调节时间⼀般都是基于阶跃响应来讨论的,注意此时输⼊的频率是0。
如果调节时间可以理解为滞后时间的话那么超前就没有办法理解了,因为仅仅⼀个微分环节是不稳定的,如果⼀定要给超前时间加上⼀个定义的话,这个时间应该是⼀万年(⽆穷⼤,呵呵)。
目录1 系统开环传递函数分析 (1)1.1比例环节--1 (1)1.2积分环节--1/S (1)1.3惯性环节--1/(6s+1) (1)1.4延迟环节--e-1.5s (2)1.5开环传递函数--Gp(s) (2)2 利用Matlab分析传递函数 (3)2.1绘制根轨迹图 (3)2.2绘制伯德图 (3)2.3绘制奈奎斯特图 (4)2.4相角裕度和幅值裕度的计算 (5)2.4.1计算相角裕度 (5)2.4.2计算幅值裕度 (5)3设计滞后超前校正装置 (6)3.1无源滞后—超前校正装置 (6)3.2确定校正函数 (6)3.2.2检验相角裕度 (7)3.2.3绘制校正后的系统传递函数的对数坐标图 (7)3.3校正装置参数设置 (9)4校正后系统的仿真以及其阶跃响应曲线 (10)4.1仿真校正前的系统 (10)4.2仿真校正后的系统 (10)结束语 (12)参考文献 (13)摘要自动控制理论是研究自动控制共同规律的技术科学。
它的发展初期,是以反馈理论为基础的自动调节原理,并主要用于工业控制。
根据被控对象及给定的技术指标要求设计自动控制系统,但由于控制对象和控制器的基本组成部分构成的反馈控制系统性能一般比较差,所以在设计中要对系统进行校正使其有良好的性能。
本次课程设计通过对高阶系统传递函数的时域分析和频域分析,计算系统动态性能和稳态性能参数。
并通过根轨迹图、伯德图和nyquist图,分析系统的状态、截止频率、幅值裕度和相角裕度。
本文是利用《自动控制原理》中所学的知识,结合课外学习的知识,对温度控制系统进行滞后超前校正使其满足相应的条件,并计算分析其相关特性。
关键字:控制系统传递函数频域分析相角裕度滞后超前校正1 系统开环传递函数分析1.1比例环节--1系统传递函数G p(s)的比例环节为1,它的基本特性如下:比例环节的传递函数为:G(s)=1,频率特性为:G(jw)=1;幅值特性为:A(w)=|G(jw)|=1,相频特性为:ϕ(w)=∠G(jw)=0°;对数幅频特性为:L(w)=20lgA(w)=20lg1=0,对数相频特性为:ϕ(w)=0°;对数幅频特性L(w)是w轴线。
第1篇一、实验目的1. 理解超前校正的原理及其在控制系统中的应用。
2. 掌握超前校正装置的设计方法。
3. 通过实验验证超前校正对系统性能的改善效果。
二、实验原理超前校正是一种常用的控制方法,通过在系统的前向通道中引入一个相位超前网络,来改善系统的动态性能。
超前校正能够提高系统的相角裕度和截止频率,从而改善系统的快速性和稳定性。
超前校正装置的传递函数一般形式为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K \) 为校正装置的增益,\( T_{s} \) 为校正装置的时间常数。
三、实验设备1. 控制系统实验平台2. 数据采集卡3. 计算机及仿真软件(如MATLAB/Simulink)4. 待校正系统四、实验步骤1. 搭建待校正系统模型:在仿真软件中搭建待校正系统的数学模型,包括系统的传递函数、输入信号等。
2. 分析系统性能:通过仿真软件分析待校正系统的性能,包括稳态误差、超调量、上升时间等。
3. 设计超前校正装置:根据待校正系统的性能要求,设计合适的超前校正装置参数。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
5. 实验数据分析:对实验数据进行分析,比较校正前后系统的性能差异。
五、实验内容1. 系统模型搭建:搭建一个简单的二阶系统模型,其传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)} \]2. 系统性能分析:分析该系统的稳态误差、超调量、上升时间等性能指标。
3. 设计超前校正装置:根据系统性能要求,设计一个超前校正装置,其传递函数为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K = 2 \),\( T_{s} = 0.5 \)。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
超前滞后校正的原理
超前滞后校正是一种用于系统控制的方法,目的是根据系统特性来补偿系统的超前或滞后相位,以提高系统的稳定性和性能。
超前滞后校正的原理基于系统的频率响应特性,即系统的幅频响应曲线。
在频率响应曲线上,超前滞后校正通过调整系统的相位和幅度来补偿系统的相位超前或滞后,使系统的频率响应曲线更接近预期的目标曲线。
具体来说,超前滞后校正一般包括以下几个步骤:
1. 频率分析:首先对系统进行频率响应分析,获取系统的幅频响应曲线和相频响应曲线。
2. 设计目标曲线:根据系统的要求,设计一个理想的幅频响应曲线和相频响应曲线。
3. 相位补偿:根据实际系统的相频响应曲线和目标曲线的相位差异,设计合适的相位补偿网络,使系统的相位更接近目标曲线。
4. 幅度补偿:根据实际系统的幅频响应曲线和目标曲线的幅度差异,设计合适的幅度补偿网络,使系统的幅度更接近目标曲线。
5. 调整参数:根据实际系统的频率响应,对相位补偿和幅度补偿网络的参数进行调整,使得系统的频率响应更接近目标曲线,
同时保持系统的稳定性。
通过超前滞后校正,可以有效地补偿系统的相位超前或滞后,提高系统的稳定性和性能。
课题:串联超前—滞后校正装置(二)专业:电气工程及其自动化班级: 2011级三班姓名:居鼎一(20110073)王松(20110078)翟凯悦(20110072)陈程(20110075)刘帅宏(20110090)邓原野(20110081)指导教师:毛盼娣设计日期:2013年12月2日成绩:重庆大学城市科技学院电气信息学院目录一、设计目的-------------------------------------------------------------1二、设计要求-------------------------------------------------------------1三、实现过程-------------------------------------------------------------33.1系统概述-------------------------------------------------------- 33.1.1设计原理------------------------------------------------- 33.1.2设计步骤------------------------------------------------- 43.2设计与分析----------------------------------------------------- 53.2.1校正前参数确定--------------------------------------- 53.2.2确定校正网络的传递函数--------------------------- 53.2.3 理论系统校正后系统的传递函数和BODE 图-- 73.2.4系统软件仿真------------------------------------------ 8四、总结------------------------------------------------------------------15五、参考文献-------------------------------------------------------------16自动控制原理课程设计报告一、设计目的(1)掌握控制系统设计与校正的步骤和方法。
自动控制原理大作业
已知单位反馈控制系统如图所示,其中。
0()(1)
K
G s s s =
+
1、试用频率法设计串联超前校正网络,满足:单位斜坡输入时,位置输出稳态误差,开环截止频率,相角裕度,请写出校正具体步骤: 解:
1.求开环增益K 传递函数为: 此系统为为Ⅰ型系统,且系统稳定,故由稳态误差91
1e ss ==
K
知:K=9
校正前系统传递函数为 )()
(1s s 9
s o +=G
(1)根据校正前系统Bode 图,确定校正前系统相角裕度和开环截止频率:
0w c =)(L
0w 9
lg
202c
= s /rad 3w c =
43.18arctanw -90-180)w (180r c c o ==+=ϕ
(2)计算校正网络的参数a 和τ:
已知开环截止频率
取s /rad 5.4w w c m
="
= ()c G s 1
9
ss e =
4.5/c
rad s ω''=50γ''≥0()(1)
K
G s s s =
+4.5/c
rad s ω''=
2c
o w 9
lg 20lga 10-5
.4"==)(L
06.5a = 0988
.006.5*5.41
a *w 1m ===
τ 10988.01
s 5.01s 1s a s c ++=
++=s G ττ)
(
(3)验算校正后的性能指标是否满足设计要求:
)
1s 0988.0)(1s (s )
1s 5.0(9)s ()s ()s (c o +++=
=G G G
6.549
7.23-47.77-04.6690)w *098
8.0(arctan -arctanw -90-)w *5.0(arctan 180)w (180r c c
c c =+="
"
"+="+=''ϕ 满足设计要求。
2、用MATLAB 画出校正前系统、校正装置和校正后系统的Bode 图:
MATLAB 程序:
G1=tf(9,[1,1,0]);
G2=tf(9*[0.5,1],conv([1,1,0],[0.0988,1])); G3=tf([0.5 1],[0.0988 1]) bode(G1) hold bode(G2,'--') hold
-100
100
M a g n i t u d e (d B )10
10
10
10
10
10
-180
-135-90-45045P h a s e (d e g )
Bode Diagram
Frequency (rad/sec)
bode(G3)
3、用MATLAB 绘制校正前和校正后系统的单位阶跃响应图,并分析两个系统不同的动态性能指标(超调量、调节时间等):
MATLAB 程序:
G1=tf(9,[1,1,0]);
G2=tf(9*[0.5,1],conv([1,1,0],[0.0988,1])); G3=tf([0.5 1],[0.0988 1]) figure
G1_c=feedback(G1,1) G2_c=feedback(G2,1) step(G1_c) hold step(G2_c,'--')
动态性能分析: 校正前:
024681012
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Step Response
Time (sec)
A m p l i t u d e
3w n = 167
.061
w 21n
≈==ζ %
75.58%100*e
%100*e
%2
2
167.0-1167.0*14.3-
-1-
===ζ
πζ
σ
s
06.1167
.0-1*314.3-1*w t 2
2
n p ==
=
ζ
π
s
986.63*167.05
.3w *5.3t n s ===
ζ
校正后:
s
648.0t p ≈
分析:加入串联超前校正装置后,动态性能中系统超调量下降,稳定性变好,调节时间、峰值时间减小,快速性变好。
2.如果在前的前向通路中加入一个周期为T 的理想采样开关构成采样闭环控制系统,试用MATLAB 绘制:当采样周期T 分别取0.01, 0.05 , 0.1, 0.5, 1时,采样控制系统的单位阶跃响应,并与未加采样开关时的连续系统的单位阶跃响应比较,分析采样器及采样周期的大小对系统性能的影响。
解:MATLAB 程序:
令T 依次等于0.01、0.05、0.1、0.5、1 T=0.01;
T1=1;T2=0.0988;T3=0.5;K=9;
G1=tf(9*[0.5,1],conv([1,1,0],[0.0988,1]));
G2=zpk([ -1/T3],[0 -1/T1 -1/T2],9*0.5/(T1*T2)); Gz=c2d(G2,T,'zoh'); G1_c=feedback(G1,1) G2_c=feedback(Gz,1) step(G1_c) hold
step(G2_c) Grid
对应图像:
)()
(1s s 9
s o +=G 9s s 9s 20++=)
(ϕ%171.0
1.0
-1.17%
=σ()c G s
T=0.01s:
T=0.05s:
T=0.1s :
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
A m p l i t u d e
00.20.4
0.60.81 1.2 1.4 1.6 1.8
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
A m p l i t u d e
T=0.5s :
T=1s :
00.51
1.52
2.5
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
A m p l i t u d e
510
152025
00.511.5
2
2.5
Step Response
Time (sec)
A m p l i t u d e
分析:
采样开关影响系统稳定性。
在采样开关作用下,连续信号会变成脉冲序列。
加入采样开关前,系统连续稳定,加入采样开关后,连续信号在不同的采样周期T 下,变换为不同的离散脉冲序列。
采样开关降低离散系统稳定性,T 越大,影响越大。
-6
-4
-2
2
4
Time (sec)
A m p l i t u d e。