哈工大自动控制原理 大作业
- 格式:doc
- 大小:284.00 KB
- 文档页数:13
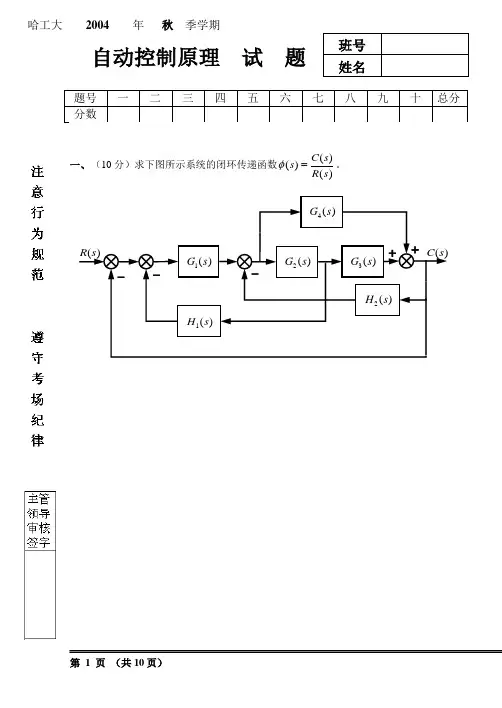
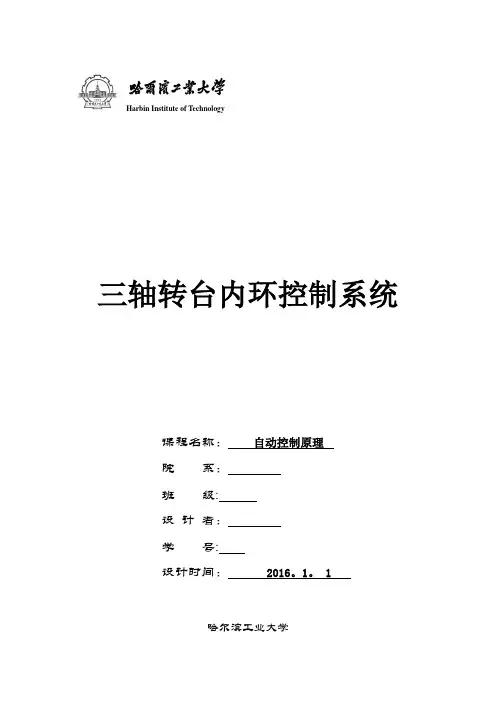
Harbin Institute of Technology三轴转台内环控制系统课程名称:自动控制原理院系:班级:设计者:学号:设计时间:. 1一、背景描述三轴转台是应用在半实物仿真系统中,模拟被测物体姿态变化的装置。
本文研究的主要内容是三轴转台的内环控制系统。
二、问题描述技术要求:最大角速度400/o s ,最大动态踪误差0.02o ss e ≤;频带宽度148c s ω-≥,相位裕度45oγ=。
固有系统传递函数:原题如下:修改后如下:三、求解过程设,为待定的补偿装置传递函数,。
设计要求为0.02oss e ≤令=,则K=2系统开环传递函数如下:E s θ sU s + —G C s G 0 s对数幅频特性方程如下:令,得剪切频率。
相位裕度:由bode图中校正前的图像可知需采用超前补偿的方法,加入校正装置如下:可求得:,得所以校正后的传递函数:校正后的相位裕度:性能要求系统相位裕度为,而校正后的系统相位裕度为,符合要求。
令,得校正后的剪切频率:校正前与校正后的系统bode图如下:四、计算机辅助设计观察系统的单位阶跃相应曲线:五、校正装置电路图电路元件参数为:R2=Ω R3=Ω C1=μF C2=μF六、结论校正后的传递函数:校正后的相位裕度:校正后的剪切频率:七、设计后的心得体会经过本次大作业的设计,我深刻体会到了基础知识的重要性:熟练掌握相关基础知识有利于理解文献和软件的高级操作。
Harbin Institute of Technology自动控制原理设计论文课程名称:自动控制原理设计题目:液压伺服系统校正院系:测控技术与仪器系班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学自动控制原理大作业一、 设计任务书考虑图中所示的系统。
要求设计一个校正装置,使得稳态速度误差常数为-14秒,相位裕度为,幅值裕度大于或等于8分贝。
利用MATLAB 画出已校正系统的单位阶跃响应和单位斜坡响应曲线。
二、 设计过程1、 人工设计1)、数据计算由图可知,校正前的开环传递函数为:0222s+0.10.025(20s 1)G =0.1(s 0.14)(1)44s s s s s +=++++ 其中按频率由小到大分别含有积分环节和放大环节,-20dB/dec ;一阶微分环节,10.05/w rad s =,0dB/dec;振荡环节,22/w rad s =,-40dB/dec;稳态速度误差:0202s+0.1e ()lim (s)lim 0.025(s 0.14)ss s s sG ss s →→∞===++。
显然,此时的相位裕度和稳态速度误差都不满足要求。
为满足题目要求,可以引入超前校正,提高系统的相位裕度和稳态速度误差。
2)、校正装置传递函数 (1)、稳态速度误差常数的确定为使稳态速度误差常数为-14秒,设加入的开环放大倍数为k,加入校正装置后的稳态速度误差满足: 11e ()4k 0.025kss v ∞=== 解得K=160;将K=160带入,对应的传递函数为:0222s+0.14(20s 1)G (s)=1600.1(s 0.14)(1)44s s s s s +=++++ 则校正前(加入k=160的放大倍数后)幅值穿越频率:018.00/c w rad s =,相位裕度:o 00.1631c r =; (2)、校正装置的确定这里采用超前补偿,由前面算得k=160,故设加入的校正装置传递函数为:111G (s)T 1c aT s s +=+ 设计后要求o =50γ,则o 0-=500.163149.8369o o γγ-=;a 满足:01sin 49.83691a a -=+ 解得:a =7.33,取a =8.取1010/18.00/c w rad s w rad s =<=作为第一个转折频率,取第二个转折频率为21*80/w a w rad s ==;在伯德图上过3rad/s 处做斜率为-20dB/dec 的线。
Harbin Institute of Technology机械系统自动控制技术大作业报告题目:伺服控制系统的控制特性研究班级:作者:学号:指导教师:郝明晖郝双晖时间:2015.5.6哈尔滨工业大学摘要交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。
本文主要以交流伺服系统为例进行伺服控制系统的控制特性分析。
一、引言“伺服系统”是指执行机构按照控制信号的要求而动作,即控制信号到来之前,被控对象时静止不动的;接收到控制信号后,被控对象则按要求动作;控制信号消失之后,被控对象应自行停止。
伺服系统的主要任务是按照控制命令要求,对信号进行变换、调控和功率放大等处理,使驱动装置输出的转矩、速度及位置都能灵活方便的控制。
图1 伺服系统构成二、伺服系统分类伺服系统的分类方法很多,常见的分类方法有以下三种.(1)按被控量参数特性分类;(2)按驱动元件的类型分类:伺服控制系统按所用控制元件的类型可分为机电伺服系统、液压伺服系统(液压控制系统)和气动伺服系统;(3)按控制原理分类.伺服系统可分为开环控制伺服系统、闭环控制伺服系统和半闭环控制伺服系统。
常见的四种伺服控制系统有液压伺服控制系统、交流伺服控制系统、直流伺服控制系统、电液伺服控制系统,下面以交流伺服系统为例进行其控制特性分析。
图2 交流控制原理三、性能分析交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。
低档的伺服系统调速范围在1:1000以上,一般的在1:5000—1:10000,高性能的可以达到1:100000以上;定位精度一般都要达到±1个脉冲,稳速精度,尤其是低速下的稳速精度比如给定1rpm时,一般的在0. 1 rpm以内,高性能的可以达到±0.01 rpm 以内;动态响应方面,通常衡量的指标是系统最高响应频率,即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后不超过90或者幅值不小于50%。
哈工大自动控制原理大作业HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】Harbin Institute of Technology课程设计说明书(论文)课程名称:自控控制原理大作业设计题目:控制系统的矫正院系:自动化测试与控制系班级:设计者:学号:指导教师:强盛设计时间: 2016.12.21哈尔滨工业大学题目88. 在德国柏林,磁悬浮列车已经开始试验运行,长度为 1600m的M-Bahn号实验线路系统代表了目前磁悬浮列车的发展水平。
自动化的磁悬浮列车可以在较短的时间内正常运行,而且具有较高的能量利用率。
车体悬浮控制系统的框图模型如图 8 所示,试设计一个合适的校正网络,使系统的相位裕度满足45°≤γ≤55°,并估算校正后系统的阶跃响应。
图 8 题 8 中磁悬浮列车悬浮控制系统一、人工设计利用半对数坐标纸手工绘制系统校正前后及校正装置的Bode图,并确定出校正装置的传递函数。
验算校正后系统是否满足性能指标要求。
1)未校正系统的开环频率特性函数应为:γ0(γγ)=1γ2(γ+10)2)未校正系统的幅频特性曲线图如下:由图中可以得出:γγ=√γ=0.316 rad/s对应的相位裕度为:γ(γγ)=180°−180°−arctan(γγ10)=−1.81°G c(s) 13)超前校正提供?(m)=50°4)γ−1γ+1=γγγ50°解得 a=7.55)−10γγγ=−8.75γγ,得到γγ=0.523 rad/s6)1γ=√γγγ=1.43 rad/s 1γγ=0.19 rad/s7)γγ(γ)=1+5.3γ1+0.7γ二、计算机辅助设计利用MATLAB语言对系统进行辅助设计、仿真和调试g = tf(1,[1 10 0 0]);gc = tf([5.3 1],[0.7 1]);ge = tf([5.3 1],conv([0.7 1],[1 10 0 0]));bode(g,gc,ge);gridlegend('uncompensated','compensator','compensated') [kg,r,wg,wc]=margin(ge)系统校正前后及校正装置的Bode图:性能指标:kg =18.3027 r =47.0334 wg =3.4822 wc =0.5273满足题目要求。
设一转速、电流双闭环直流调速系统,米用双极式H桥PWM方式驱动, 已知电动机参数为:额定功率200W ;额定转速48V ;额定电流4A ;额定转速=500r/min ;电枢回路总电阻;允许电流过载倍数=2;电势系数C e =0.04Vmin/r ;电磁时间常数T L-0.008s;机电时间常数T m= 0.5;电流反馈滤波时间常数To^ 0.2ms;转速反馈滤波时间常数T°n = 1ms;要求转速调节器和电流调节器的最大输入电压U;m =5;=10V ;两调节器的输出限幅电压为10V ;PWM功率变换器的开关频率f -10kHz;放大倍数K s=4.8。
试对该系统进行动态参数设计,设计指标:稳态无静差;电流超调量;—-5%;空载起动到额定转速时的转速超调量二-25% ;过渡过程时间t s=0.5 s。
1.计算电流和转速反馈系数电流反馈系数:U10 = 1.25(V/A )'Inom2 4转速反馈系数:*U nmCi —-10 0.02(V min /r)nn om5002.电流环的设计(1)确定时间常数电流反馈滤波时间常数T °i = 0.2ms =0.0002s ,11调制周期 T s=——0.0001s ,f 10x1000按电流环小时间常数的近似处理方法,取T 沪 T s T °i =0.0001 0.0002 = 0.0003s(2) 选择电流调节器结构电流环可按I 型系统进行设计。
电流调节器选用PI 调节器,其传递函数为皿+1 G ACR (s)二 K iNS(3) 选择调节器参数超前时间常数:j =T = 0.008s 。
电流环按超调量6^5%考虑,电流环开环增益:取 K,^^0.5,因此0.50.5K ,1666.6667Tj 0.0003于是,电流调节器的比例系数为0.008乂 8 K i = K } -1666.6667 17.7778K s1.25 4.8(4) 检验近似条件电流环的截止频率•〔= K| =1666.6667 1/s现在,3333.3333 • 1666.6667 =•⑺,满足近似条件。
哈尔滨工程大学本科生考试试卷(2007~2008学年第一学期)课程编号:0400003 (1)课程名称:自动控制理论(一)二、线性系统的时域分析(共25分)1、设系统的特征方程为:s4+ 4s3+ 13s2+ 36s+k = 0试应用劳斯稳定判据确定欲使系统稳定的k的取值范围。
(5分)2、已知控制系统的结构图如下图所示,单位阶跃响应的超调量 a =9.5%,峰p值时间tp = 1s,试求:p(1)根据已知性能确定参数k和丁;(5分)2、已知控制系统结构图如下图所示。
绘制该系统的信号流图,并用梅森增益公式求系统的传递函数C(s)/R(s)。
(8分)1c ......................................当车刖入r(t)为单位加速度信亏时(即r(t) =;t ),为使系统的稳态误差为0,试确定前馈环节的参数a和b。
(10分)三、线性系统的根轨迹(共15分)某系统的结构图如下图所示。
要求:1、绘制系统的根轨迹草图(10分)。
2、确定使系统稳定的kg值范围(2分)。
g3、确定使系统的阶跃响应不出现超调的最大k g值(3分)一、控制系统的数学模型(共20分)1、已知控制系统结构图如下图所示。
试通过结构图等效变换求系统的传递函数C(s)/R(s)。
(7分)(要求:有化简过程)。
R(s)(2)计算输入信号为r(t) = 1.5t时的稳态误差。
(5分)R(s)3、复合控制系统的结构图如下图所示,前馈环节的传递函数as2 bsG r(s)=『r ‘Rs^wj 一s2*5 _^suY (s+2)(s—0.5)3、求下图有源网络的传递函数U0(s)/U i(s),并指出该网络届丁哪类典型环节?(5 分)。
第1页共2页第2页共2页第3页共4页 第4页 共4页四、线性系统的频域分析(共10分)1、已知最小相位系统的 Bode 图如下图所示。
求该系统的传递函数 G (s )。
(5分)L()A 10 一 0__ 1六、非线性控制系统分析(共15分)非线性控制系统如下图所示。
H a r b i n I n s t i t u t e o f T e c h n o l o g y课程设计说明书(论文)课程名称:自动控制原理设计题目:串联校正装置设计院系:自动化测试与控制系班级:1201112设计学号:1120110623指导教师:马明达设计时间:2014.12.25哈尔滨工业大学哈尔滨工业大学课程设计任务书一、人工设计已知技术参数和设计要求:设单位反馈系统开环传递函数为126()11(1)(1)1060K G s s s s =++要求设计一串联校正装置,使系统满足:(4)输入速度为1(rad/s)时,稳态速度误差不大于1/126(rad); (5)开环放大系数不变; (6)相角裕度不小于30°,截止频率为20(rad/s)。
)1631)(189()1101)(19.81(c ++++=s s s s G即校正装置电路参数由校正装置传递函数)1631)(189()1101)(19.81(c ++++=s s s s G ,设计滞后超前电路网络:此网络传递函数 221121221122112211)()(22C R C R s C R C R C R s C R C R s C R C R s U U sr sc +++++++=,由于sr scc U U G =,所以据此求解可得到电阻R 和电容C 。
R 1=45.5Ω C 1=220μF解得 R 2=8.9Ω C 2=1F二.计算机辅助设计Simulink仿真框图校正前校正后阶跃响应曲线校正前012345678-2-1.5-1-0.50.511.5x 109Step ResponseTime (seconds)A m p l i t u d e校正后00.511.5Step ResponseTime (seconds)A m p l i t u d eBode 图10-210-110101102103104P h a s e (d e g )Bode DiagramGm = 13.3 dB (at 53.5 rad/s) , P m = 34.2 deg (at 19.8 rad/s)Frequency (rad/s)-150-100-50050100M a g n i t u d e (d B )根轨迹图校正前Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)-150-100-5050100150校正后-300-250-200-150-100-50050100-250-200-150-100-50050100150200250Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)Nyquist 图校正前(整体图)-250-200-150-100-50050100150200250Nyquist DiagramReal AxisI m a g i n a r y A x i s( 局部放大图)-7-6-5-4-3-2-10-4-3-2-11234Nyquist DiagramReal AxisI m a g i n a r y A x i s校正后(整体图)-80-70-60-50-40-30-20-100-1500-1000-50050010001500Nyquist DiagramReal AxisI m a g i n a r y A x i s(局部放大图)哈尔滨工业大学课程设计说明书(论文)-10-9-8-7-6-5-4-3-2-101-8-6-4-202468Nyquist DiagramReal Axis I m a g i n a r y A x i s三.设计结论通过人工设计求出校正装置的传递函数以及校正装置的电路参数,设计出滞后超前的串联校正装置。
Harbin Institute of Technology三轴转台内环控制系统课程名称:自动控制原理院系:班级:设计者:学号:设计时间:2016。
1。
1哈尔滨工业大学哈尔滨工业大学一、背景描述三轴转台是应用在半实物仿真系统中,模拟被测物体姿态变化的装置.本文研究的主要内容是三轴转台的内环控制系统。
二、问题描述技术要求:最大角速度400/o s ,最大动态踪误差0.02o ss e ≤;频带宽度148c s ω-≥,相位裕度45oγ=。
固有系统传递函数: 原题如下:修改后如下:三、求解过程设,为待定的补偿装置传递函数,。
设计要求为0.02oss e ≤令0。
02=,则K=2系统开环传递函数如下:E s θ sU s + —G C s G 0 s对数幅频特性方程如下:令,得剪切频率。
相位裕度:由bode图中校正前的图像可知需采用超前补偿的方法,加入校正装置如下:可求得:,得哈尔滨工业大学所以校正后的传递函数:校正后的相位裕度:性能要求系统相位裕度为,而校正后的系统相位裕度为,符合要求. 令,得校正后的剪切频率::校正前与校正后的系统bode图如下哈尔滨工业大学四、计算机辅助设计观察系统的单位阶跃相应曲线:哈尔滨工业大学五、校正装置电路图电路元件参数为:R2=1.3kΩ R3=6.0kΩ C1=28.1μF C2=12.8μF六、结论校正后的传递函数:哈尔滨工业大学校正后的相位裕度::校正后的剪切频率七、设计后的心得体会经过本次大作业的设计,我深刻体会到了基础知识的重要性:熟练掌握相关基础知识有利于理解文献和软件的高级操作.哈尔滨工业大学。
哈工大自动控制原理大作业一、设计任务:在新材料的分析测试工作中,需要在较宽的参数范围内真实再现材料的实际 工作环境。
从控制系统的角度出发,可以认为,材料分析设备是一个能准确 跟踪参考输入的伺服系统。
该系统的框图如图所示。
7. 继续参考题6给出的系统,试设计一个合适的超前校正网络,使系统的相角裕度为50,调节时间小于4秒(按2%准则),稳态速度误差常数为2秒-1。
二、设计过程: 原传递函数 ()042(1)(2)(1)(1)2G s s s s s s s ==++++ 转折频率为11ω=和22ω=,剪切频率122c ωωω==Bode 图如下:系统的相位裕度218090arctan 2arctan02γ=---= 为了满足相位裕度50γ≥的条件,需要对系统进行超前补偿。
由于要求稳态速度误差常数为2秒-1,所以放大系数K=2,即K 保持不变。
取50γ=,11 1.3sin sin 50r M γ=== 22 1.5(1) 2.5(1)s r r c t M M πω⎡⎤=+-+-⎣⎦且要求s t 小于四秒。
求得 2.1c ω≥,Mr Mr c 12-≤ωω知50.02≤ω。
所以根据设计要求50.02≤ω在Bode 图上进行设计,取2.02=ω(为了计算方便)求得串联超前校正环节传递函数11012.0)(++=s ss Gc 并且作图如下:补偿之后的系统传递函数为)110)(12)(1()12.0(2)()()(++++==ss s s ss Go s Gc s G 相位裕度18090arctan 22.5arctan 4.5arctan 2.25arctan 0.4150.21γ=-+---=1 1.3sin 50.21r M ==,22 1.5(1) 2.5(1) 3.82s r r c t M M s πω⎡⎤=+-+-=⎣⎦ 均满足设计条件。
2、计算机辅助设计: (1)校正前伯德图M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 3.52 dB (at 1.41 rad/sec) , P m = 11.4 deg (at 1.14 rad/sec)Frequency (rad/sec)(2)校正后伯德图-200-150-100-50050M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 34.2 dB (at 14.1 rad/sec) , P m = 50.9 deg (at 1.57 rad/sec)Frequency (rad/sec)(3)三个伯德图Bode DiagramFrequency (rad/sec)10101010101010P h a s e (d e g )M a g n i t u d e (d B )3、单位阶跃响应曲线以及单位速度响应曲线01234567891012345678910Linear Simulation ResultsTime (sec)A m p l i t u d eStep ResponseTime (sec)A m p l i t u d e0123456789100.20.40.60.811.21.44、校正后阶跃响应图三、校正装置电路图C1 1uFC210pF+-OU TR1 1M R2 1MR0100k三、设计结论:校正后的系统相位裕度为50.9,调节时间为3秒,稳态速度误差常数为2,符合要求。
自动控制原理大作业(设计任务书):院系:班级:学号:5. 参考图 5 所示的系统。
试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60度,幅值裕度不小于8 分贝。
利用MATLAB 画出 已校正系统的单位阶跃和单位斜坡响应曲线。
+一.人工设计过程1.计算数据确定校正装置传递函数为满足设计要求,这里将超前滞后装置的形式选为)1)(()1)(1()(2121T s T s T s T s K s G cc ββ++++= 于是,校正后系统的开环传递函数为)()(s G s G c 。
这样就有)5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205==cK所以100=c K这里我们令100=K ,1=c K ,则为校正系统开环传函)5)(1(100)(++=s s s s G首先绘制未校正系统的Bode 图由图1可知,增益已调整但尚校正的系统的相角裕度为︒23.6504-,这表明系统是不稳定的。
超前滞后校正装置设计的下一步是选择一个新的增益穿越频率。
由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s ,将新的增益穿越频率仍选为2rad/s ,但要求2=ωrad/s 处的超前相角为︒60。
单个超前滞后装置能够轻易提供这一超前角。
一旦选定增益频率为2rad/s ,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。
将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。
要获得另一个转角频率)/(12T βω=,需要知道β的数值, 对于超前校正,最大的超前相角m φ由下式确定11sin +-=ββφm 因此选)79.64(20==m φβ,那么,对应校正装置相角滞后部分的极点的转角频率为)/(12T βω=就是01.0=ω,于是,超前滞后校正装置的相角滞后部分的传函为1100152001.02.0++=++s s s s 相角超前部分:由图1知dB j G 10|)4.2(|=。
哈工大自动控制原理大作业Harbin Institute of Technology课程设计说明书(论文)课程名称:自控控制原理大作业设计题目:控制系统的矫正院系:自动化测试与控制系班级:设计者:学号:指导教师:强盛设计时间: 2016.12.21哈尔滨工业大学题目88. 在德国柏林,磁悬浮列车已经开始试验运行,长度为 1600m的M-Bahn号实验线路系统代表了目前磁悬浮列车的发展水平。
自动化的磁悬浮列车可以在较短的时间内正常运行,而且具有较高的能量利用率。
车体悬浮控制系统的框图模型如图 8 所示,试设计一个合适的校正网络,使系统的相位裕度满足45°≤γ≤55°,并估算校正后系统的阶跃响应。
图 8 题 8 中磁悬浮列车悬浮控制系统一、人工设计利用半对数坐标纸手工绘制系统校正前后及校正装置的Bode图,并确定出校正装置的传递函数。
验算校正后系统是否满足性能指标要求。
1)未校正系统的开环频率特性函数应为:G0(jω)=1s2(s+10)1s2 (s 10)2)未校正系统的幅频特性曲线图如下:由图中可以得出:ωc=√K=0.316 rad/s 对应的相位裕度为:γ(ωc)=180°−180°−arctan(ωc10)=−1.81°3)超前校正提供∅(m)=50°4)a−1a+1=sin50°解得 a=7.55)−10lga=−8.75dB,得到ωm=0.523 rad/s6)1T =√aωm=1.43 rad/s 1aT=0.19 rad/s7)G C(s)=1+5.3s1+0.7s10-210-1100101102二、计算机辅助设计利用MATLAB语言对系统进行辅助设计、仿真和调试g = tf(1,[1 10 0 0]);gc = tf([5.3 1],[0.7 1]);ge = tf([5.3 1],conv([0.7 1],[1 10 0 0]));bode(g,gc,ge);gridlegend('uncompensated','compensator','compensated')[kg,r,wg,wc]=margin(ge)系统校正前后及校正装置的Bode图:性能指标:kg =18.3027 r =47.0334 wg =3.4822 wc =0.5273 满足题目要求。
第一部分:设计任务书 (3)一、搬运机械手功能示意图 (3)二、基本要求与参数 (3)三、工作量 (4)四、设计内容及说明 (4)第二部分:设计说明书 (5)一、机械手工作臂及机身驱动部件的选择及设计 (5)1. 驱动部件选择 (5)2. 传感器选择 (5)3. 驱动及传动方案 (5)二、末端夹持机构设计 (6)1. 结构设计 (6)2. 夹紧力计算 (7)三、控制系统设计 (8)1. 控制器选择 (8)2. 控制模块与控制方案 (8)3. 控制流程框图和电磁铁动作时序表 (9)4. PLC I/O 口分配 (11)5. 机械手运行步骤 (12)四、参考文献 (13)一、搬运机械手功能示意图二、基本要求与参数本作业要求完成一种二指机械手的运动控制系统设计。
该机械手采用二指夹持结构,如图1所示,机械手实现对工件的夹持、搬运、放置等操作。
以夹持圆柱体为例,要求设计运动控制系统及控制流程。
机械手通过升降、左右回转、前后伸缩、夹紧及松开等动作完成工件从位置A到B的搬运工作,具体操作顺序:逆时针回转(机械手的初始位置在A与B之间)—>下降一>夹紧一>上升一>顺时针回转一>下降一>松开一>上升,机械手的工作臂都设有限位开关设计参数:(1)抓重:10Kg( 2)最大工作半径:15OOmm( 3)运动参数:伸缩行程:0-1200mm;伸缩速度:80mm/s ;升降行程:0-500mm;升降速度:50mm/s回转范围:0-1800控制器要求:(1)在PLG单片机、PC微机或者DSP中任选其一;(2)具备回原点、手动单步操作及自动连续操作等基本功能。
三、工作量(1)驱动及传动方案的设计及部件的选择;(2)二指夹持机构的设计及计算;(3)总体控制方案及控制流程的设计; ( 4)设计说明书一份。
四、设计内容及说明(1 )机械手工作臂及机身驱动部件的选择及设计,需设计出具体的驱动及传动方案,画出方案原理框图。
( 2)末端夹持机构设计,该结构需保证抓取精度高,重复定位精度和运动稳定性好,并有足够的抓取能力。
自动控制原理大作业(设计任务书)姓名:院系:班级:学号:5. 参考图5 所示的系统。
试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60度,幅值裕度不小于8 分贝。
利用MATLAB 画出 已校正系统的单位阶跃和单位斜坡响应曲线。
+一.人工设计过程1.计算数据确定校正装置传递函数为满足设计要求,这里将超前滞后装置的形式选为)1)(()1)(1()(2121T s T s T s T s K s G cc ββ++++= 于是,校正后系统的开环传递函数为)()(s G s G c 。
这样就有)5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205==cK所以100=c K这里我们令100=K ,1=c K ,则为校正系统开环传函)5)(1(100)(++=s s s s G首先绘制未校正系统的Bode 图由图1可知,增益已调整但尚校正的系统的相角裕度为︒23.6504-,这表明系统是不稳定的。
超前滞后校正装置设计的下一步是选择一个新的增益穿越频率。
由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s ,将新的增益穿越频率仍选为2rad/s ,但要求2=ωrad/s 处的超前相角为︒60。
单个超前滞后装置能够轻易提供这一超前角。
一旦选定增益频率为2rad/s ,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。
将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。
要获得另一个转角频率)/(12T βω=,需要知道β的数值, 对于超前校正,最大的超前相角m φ由下式确定11sin +-=ββφm 因此选)79.64(20==m φβ,那么,对应校正装置相角滞后部分的极点的转角频率为)/(12T βω=就是01.0=ω,于是,超前滞后校正装置的相角滞后部分的传函为1100152001.02.0++=++s s s s 相角超前部分:由图1知dB j G 10|)4.2(|=。
因此,如果超前滞后校正装置在2=ωrad/s 处提供-10dB 的增益,新的增益穿越频率就是所期望的增益穿越频率。
从这一要求出发,可以画一条斜率为-20dB 且穿过(2rad/s ,-10dB )的直线。
这条直线与0dB 和-26dB 线的交点就确定了转角频率。
因此,超前部分的转角频率被确定为s rad s rad /10/5.021==ωω和。
因此,超前校正装置的超前部分传函为)11.012(201105.0++=++s s s s综合校正装置的超前与之后部分的传函,可以得到校正装置的传递函数)(S G c 。
即)1100)(11.0()15)(12(01.02.0105.0)(++++=++++=s s s s s s s s s G c校正后系统的开环传递函数为)5)(1(100)01.0()2.0()7()23.0()()(++++++=s s s s s s s s G s G css s s s s s 35.047.3513.4701.136.44310023452++++++=)12.0)(1()1100)(11.0()15)(12(20++++++=s s s s s s s)2100(tan )21.0(tan 90)22(tan )25(tan 1801111⨯-⨯--⨯+⨯+=---- γ99.63)22.0(tan )21(tan 11=⨯-⨯---满足条件。
二.计算机辅助设计过程MATLAB 程序1 : >> num=[100]; >> den=[1 6 5 0];>> w=logspace(-1,1,100); >> bode(num,den,w) >> grid>> title('Bode Diagram of G1(s)=100/[s(s+1)(s+5)]') >> [Gm,Pm,wcp,wcg]=margin(num,den); Warning: The closed-loop system is unstable. >> GmdB=20*log10(Gm); >> [GmdB,Pm,wcp,wcg]ans =-10.4576 -23.6504 2.2361 3.907 >> gtext('Phase margin= -23.6504 degrees') >> gtext('Gain margin=-10.4576 dB'-40-20204060M a g n i t u d e (d B )101010-270-225-180-135-90P h a s e (d e g )Bode Diagram of G(s)=100/[s(s+1)(s+5)]Frequency (rad/s)图1 G(S)的Bode 图MATLAB 程序2>> numc=[1 0.7 0.1] >> denc=[1 10.01 0.1] >> bode(numc,denc); >> grid>> title('Bode Diagram of Lag-Lead Compensator')-25-20-15-10-50M a g n i t u d e (d B)1010101010101010-90-454590P h a s e (d e g )Bode Diagram of Lag-Lead Compensator1110100115Frequency (rad/s)图2 所设计的超前滞后校正装置的Bode 图>> a=[1 7.01 0.07]; >> b=[1 6 5 0]; >> conv(a,b)ans =1.0000 13.0100 47.1300 35.4700 0.3500 0校正后系统的开环传递函数为)5)(1(100)01.0()2.0()7()23.0()()(++++++=s s s s s s s s G s G css s s s s s 35.047.3513.4701.136.44310023452++++++= )12.0)(1()1100)(11.0()15)(12(20++++++=s s s s s s sMATLAB 程序3>> num1=[100 70 10];>> den1=[1 16.01 65.16 50.65 0.5 0]; >> bode(num1,den1) Grid>> title('Bode Diagram of Gc(s)G(s)') [Gm,Pm,wcp,wcg]=margin(num1,den1); GmdB=20*log10(Gm); [GmdB,Pm,wcp,wcg]ans =18.3255 69.4880 7.3877 1.6881 >> gtext('Phase margin=60.5377 degrees') >> gtext('Gain margin=14.1518 dB')M a g n i t u d e (d B )1010101010101010P h a s e (d e g )Bode Diagram of Gc(s)G(s)1110100115Frequency (rad/s)图3 校正后系统的开环传递函数)()(s G s G c 的Bode 图校正后系统的相角裕度69.488°,增益裕度为18.33dB ,静态速度误差系数为201-s ,所以要求均已满足。
单位阶跃响应:13Step ResponseTime (seconds)A m p l i t u d e图4 调整增益,但未加校正前单位阶跃响应曲线校正后因为)5)(1()01.0)(10()2.0)(5.0(100)()(++++++=s s s s s s s s G s G c 所以有)()(1)()()()(s G s G s G s G s R s C c c +==)2.0)(5.0(100)5)(1()01.0)(10()2.0)(5.0(100+++++++++s s s s s s s s s 1.001.10)01.0)(10()(2++=++=s s s s s a s s s s s s s b 56)5)(1()(23++=++=1070100)2.0)(5.0(100)(2++=++=s s s s s c于是有a=[1 10.01 0.1] b=[1 6 5 0] c=[100 70 10 ]>> a=[1 10.01 0.1]; >> b=[1 6 5 0]; >> c=[100 70 10 ]; >> p=[conv(a,b)]+[0 0 0 c]p =1.0000 16.0100 65.1600 150.6500 70.5000 10.0000MATLAB 程序4>> num=[100 70 10];>> den=[ 1 16.01 65.16 150.65 70.5 10]; >>t=0:0.2:50;>> step(num,den,t) >> grid>> title('Unit-Step Response of Compensated Systerm')0.20.40.60.811.21.4Unit-Step Response of Compensated SystermTime (seconds)A m p l i t u d e图5 校正后系统的单位阶跃响应曲线单位斜坡响应:4图6 调整增益,但未加校正前单位斜坡响应曲线MATLAB程序5>> num=[100 70 10];>> den=[ 1 16.01 65.16 150.65 70.5 10 0]>>t=0:0.05:20;>>c=step(num,den,t);>> plot(t,c,'-',t,t,'.')>> grid>> title('Unit-Ramp Response of Compensated Systerm')>> xlabel('Time(sec)')>> ylabel('Unit-Ramp Input and Output c(t)' )02468101214161820Unit-Ramp Response of Compensated SystermTime(sec)U n i t -R a m p I n p u t a n d O u t p u t c (t )图7 校正后系统的单位斜坡响应曲线Simulink 仿真框图0123456789101110100115wangsiyut/s y图(1)单位阶跃响应仿真图像0123456789101110100115wangsiyu图(2)单位斜坡响应图像三.校正装置电路图sr U sc U)1100)(11.0()15)(12(1])1([)1)(1()()(221122121++++=++++++=s s s s s T R R T s T T s T s T s U s U sr sc 5111==C R T 2222==C R T四.设计结论 设计的滞后超前校正装置为)1100)(11.0()15)(12()(++++=s s s s s G c ,经计算和仿真,校正后系统的相角裕度69.488°,增益裕度为18.33dB ,静态速度误差系数为201-s ,所以要求均已满足。