16路舵机驱动板程序使用说明
- 格式:docx
- 大小:13.55 KB
- 文档页数:6
Servo Driver HAT用户手册前言本产品是基于树莓派而设计的PWM/舵机扩展板,通过PCA9685芯片扩展16路舵机控制或者PWM输出,每个通道12位分辨率。
通过I2C接口控制,无需占用额外的引脚。
板载5V稳压芯片,可接电池供电,最大输出3A电流。
适用于控制机械手臂,以及各种舵机机器人。
产品特性输入电压VIN:6V~12V舵机电压:5V逻辑电压:3.3V驱动芯片:PCA9685控制接口:I2C产品尺寸:65mm x 30mm固定孔通径:3.0mm硬件说明板子可以从树莓派上取电不需要额外供电。
也可以通过右边绿色端子VIN接电池供电,输入电压范围6V~12V。
经过板载的5V稳压芯片输出5V电源给舵机和树莓派供电,最大输出电流3A。
A0~A4可以设置PCA9685芯片的I2C设备地址,可以同时接多个Servo Driver HAT最上面的排针是舵机接口,黑色排针是GND(大部分舵机对应的是褐色线), 红色排针是5V电源,黄色排针是PWM信号线,有0~15个通道,可以同时接16个舵机。
注意舵机线不要接反,否则舵机不会转动。
注意:如果接大功率的舵机可能会出现供电不足的现象,需要接更多的电源使用指南开启I2C接口执行如下命令进行树莓派配置:sudo raspi-config选择Interfacing Options -> I2C ->yes 启动i2C内核驱动注意:运行程序后有提示I2C错误,可以运行如下命令打开配置文件sudo nano /etc/modules如果没有这两行语句则添加上去,并保存退出。
i2c-devi2c-bcm2708运行程序我们提供python2和python3的示例程序,功能包括简单的PCA9685库测试程序,wifi遥控程序以及蓝牙遥控程序。
其中wifi和蓝牙遥控发送端是通过手机APP发送指令,需要安装对应的APP(只支持安卓) 手机下载相应的APP并安装。

16通道伺服舵机控制器使用说明设计者:翁旭辉西北工业大学机电学院<一>作品设计背景在当今机器人制作领域,控制系统部分作为机器人DIY一族公认为最难以实现的部分,爱好者普遍采用51或52系列单片机,但是存在一个普遍问题,传统的51系列的单片机远远不能满足机器人的高精度的控制需要;A TMEL公司的A VRmega高速嵌入式单片机,采用RISK精简指令集,指令执行速度为51单片机的10倍以上,且驱动电流大,功能齐全,具有ISP在线编程功能和软件模拟仿真调试功能,适合业余制作机器人需要,同时又可满足目前机器人(尤其是仿生机器人和带有表演性质的机器人)的控制要求。
本作品为在A VR系列mega8515L单片机基础上开发的伺服电机控制系统之一,它可以控制16路伺服舵机、解决了DIY机器人制作领域的基本动作控制要求,同时本系统板留有万用实验板部分,可以加入红外传感、点阵或语音电路等实现机器人的智能控制。
本作品已经在校机器人创新基地经过验证,确实具有很高的推广价值。
<二>工作原理及电路图此伺服电机控制系统的主体线路有A VRmega8515L单片机,RS232通讯部件、I2C总线插座、16路伺服舵机控制接口、8MHZ晶体、A VR-ISP编程下载接口。
见图1。
图1当用串口调试舵机的动作指令时,单片机通过RS232串口与PC机COM1口实时通讯:PC 终端拖动控制滑杆发出动作数据,单片机将数据处理后由定时器1引用中断产生0.5ms开始脉宽和5ms以上的间隔脉宽信号,由定时器0引用中断产生伺服电机动作所需的脉宽,由于串口通讯的实时性,舵机可以动态的跟踪信号的变化。
关键芯片为MAX232,DIP16封装。
<三>详细使用说明1.伺服舵机的实时调试模式:首先将主单片机的PB0口的跳线接至高电平,将串口接好PC机和单片机,打开16通道舵机控制器并启动滑竿,然后打开单片机+6V电源,拖动滑竿,如果舵机能实时跟踪滑块的动作,说明通讯正常。
舵机驱动程序所用的舵机型号为Tower Pro Micro Servo 99 SG90,单片机型号为Atmega16。
舵机有三根引出线:VCC,GND,CONTROL。
VCC,GND为舵机的电源线,CONTROL为舵机控制信号的输入线。
控制信号为50Hz的PWM波形(矩形波),不同的脉宽(占空比)对应舵机不同的方位角。
改变脉宽即可改变舵机的方位角。
在没有过载且控制信号持续稳定的条件下,舵机的方位角严格保持不变.此控制信号适合所有类型的舵机.需要注意的是尽管也可以用延时函数来实现PWM波,但舵机运行可能不平稳,而且若PWM波的频率偏离50Hz过大,舵机会出现震颤甚至会无法启动舵机!下面给出了一特定脉宽的舵机控制信号,PB7为控制信号的输出端口。
程序中采用T/C0定时器中断的方式来产生PWM波形,信号更准确.需要说明的是,因程序脉宽调整得原理,脉宽的可能取值是离散的,只能得到一些特定位置,但对于普通的执行机构,是能够满足要求的。
//ICC—AVR application builder : 2010—9-21 10:22:14// Target : M16// Crystal: 8。
0000Mhz#include 〈iom16v。
h>#include 〈macros.h>//servo—driveunsigned int count_T=0;unsigned int angle=3;// set angle//note: change the value of angle(0~5),then you can get different angle //position of the servo//TIMER0 initialisation - prescale:64// WGM: Normal// desired value: 0.5mSec// actual value: 0.499mSec (0.2%)void timer0_init(void){TCCR0 = 0x00;//stopTCNT0 = 0xC2; //set countOCR0 = 0x00; //set compareTCCR0 = 0x03; //start timer}#pragma interrupt_handler timer0_comp_isr:20void timer0_comp_isr(void){//compare occured TCNT0=OCR0if(count_T<angle) PORTB|=(1〈<PB7);//PB7 as output port to control servo else PORTB&=~(1〈〈PB7);count_T++;count_T%=40;}//call this routine to initialize all peripherals void init_devices0(void){//stop errant interrupts until set upCLI();//disable all interruptstimer0_init();MCUCR = 0x00;GICR = 0x00;TIMSK = 0x02; //timer interrupt sourcesSEI(); //re—enable interrupts//all peripherals are now initialized}//port initialvoid port_init( ){DDRA = 0x00;DDRB = 0x10; //PB7 as output port to control servo DDRC = 0x00;DDRD = 0x00;PORTA = 0x00;PORTB = 0x00;PORTC = 0x00;PORTD = 0x00;}void main(){port_init();init_devices0( );while(1);}。
舵机的使用方法
1. 确认舵机的电源和控制信号线。
舵机一般有电源正极、负极
和控制信号线三根线,其中红线为正极,接到电源正极,黑线为负极,接到电源负极,控制信号线一般为白、橙、黄三种颜色,需通过控制
器或开发板来控制舵机转动。
2. 连接舵机到控制器或开发板。
将舵机的控制信号线插入到控
制器或开发板的对应的GPIO口上,并将电源的正负极连接到电源模块上。
3. 写代码进行控制。
使用代码控制舵机转动,可以通过改变PWM 脉宽的大小,更改需要转动的角度和速度等参数来实现不同的舵机控
制方式。
舵机的基本操作是通过一个信号脉冲来控制,这个脉冲的宽
度即为PWM的脉宽,脉冲的周期一般为20ms。
舵机的控制范围一般为
0到180度,有些高级舵机还支持连续旋转等特殊功能。
4. 调试测试。
在编写代码过程中,可以通过串口监视器或者其
他调试工具来查看舵机转动的情况,进行参数微调和测试,直到舵机
达到预期效果。
16路舵机控制章节一:引言在机器人技术领域,舵机作为一种重要的控制元件,广泛应用于多种机械臂、机械手、机器人等设备中。
舵机的准确控制能力使得机器人能够实现精细的运动和多样化的动作。
然而,对于大规模舵机系统的控制,传统的单一控制方法往往会面临一系列困难,例如系统稳定性难以保证、实时性差等问题。
因此,本文研究了一种新的控制方法,即16路舵机控制方法,针对这些问题进行了深入探讨和分析。
本文将在以下几个章节中详细介绍16路舵机控制的原理、方法和实验结果。
章节二:16路舵机控制的原理首先,本章将介绍16路舵机控制的原理。
该控制方法采用了分布式控制的思想,以提高系统的稳定性和可靠性。
通过将16路舵机分为若干个小组,每个小组由一个主舵机和若干从舵机组成,采用分别控制主舵机和从舵机的方式,实现舵机间相互协作的目标。
此外,本章还将介绍采用PID控制器来对舵机进行控制的原理,并给出相应的数学模型和控制算法。
章节三:16路舵机控制的方法本章将详细介绍16路舵机控制的方法。
首先,通过研究舵机的数据通信协议,确保主控单元与舵机之间能够进行有效的通信和控制。
其次,通过编写相应的控制程序,实现对16路舵机的控制和协调。
为了减小传感器的测量误差对系统造成的负面影响,本章还将引入滤波算法和误差补偿算法,以提高系统的控制精度和稳定性。
最后,针对实时性要求较高的应用场景,本章将介绍使用RTOS(Real-Time Operating System)实时操作系统来实现16路舵机控制的方法。
章节四:实验结果与分析为了验证16路舵机控制方法的有效性和性能,本章将进行一系列实验并对实验结果进行详细的分析。
首先,搭建16路舵机控制系统的硬件平台,并采集相应的传感器数据。
然后,通过对比分析传统的单一控制方法和16路舵机控制方法在系统稳定性、精度和实时性等方面的差异。
最后,对实验结果进行总结和讨论,并指出本文所提出的16路舵机控制方法的优势和不足之处,为未来的深入研究提供参考。
舵机操作规程一、引言舵机是一种用于控制机械系统中转动角度的设备,广泛应用于无人机、机器人、模型船等各种电动机械系统中。
为了确保舵机的稳定工作和延长其使用寿命,制定一套科学合理的舵机操作规程是非常重要的。
本文档旨在为使用舵机的操作人员提供一些基本的操作准则和注意事项。
二、舵机操作规程1. 电源准备在使用舵机之前,要确保给舵机供电的电源稳定可靠。
常用的供电电压为4.8V至6V,可以通过电池组、稳压模块或者直流电源等供电方式进行连接。
应注意电源的极性,确保正负极接线正确,以避免电源反接导致舵机损坏。
2. 连接舵机将舵机的信号线、电源线和地线连接到控制设备或电源上。
注意信号线的连接要与控制设备或接收机的对应通道连接,以确保舵机能够被正确控制。
为了避免线缆松动,可以使用适当的固定装置将线缆固定好,确保连接可靠稳定。
3. 舵机调节在操作舵机之前,需要对舵机进行调节,使其能够在适当的角度范围内工作。
可以通过调节舵机的零点位置和极限位置,使其可以达到所需的角度范围。
具体的调节方式和范围可以参考舵机的使用说明书或者相关文档。
4. 控制信号通过控制设备发送信号来控制舵机的转动角度。
通常情况下,舵机的控制信号是通过脉宽调制(PWM)的方式发送的。
脉宽的长度决定了舵机转动的角度,通常一个周期约为20ms,脉宽范围在1ms至2ms之间。
根据具体的控制设备和舵机型号,可以设置相应的脉宽来控制舵机的转动角度。
5. 注意事项(1)舵机工作时产生的振动和冲击会影响舵机的寿命,因此在安装舵机时要注意使用适当的防震装置,减少振动和冲击对舵机的影响。
(2)舵机温度过高会影响其工作效果和寿命,因此在使用过程中要注意舵机的散热问题,避免过度工作导致温度过高。
(3)舵机在工作时会消耗一定的电流,因此要根据舵机的额定电流和供电设备的电流输出能力来选择合适的供电设备,以保证供电稳定可靠。
(4)舵机在运动过程中可能会发出一些噪声,在使用过程中要注意舵机噪声对周围环境的影响,避免造成不必要的干扰。
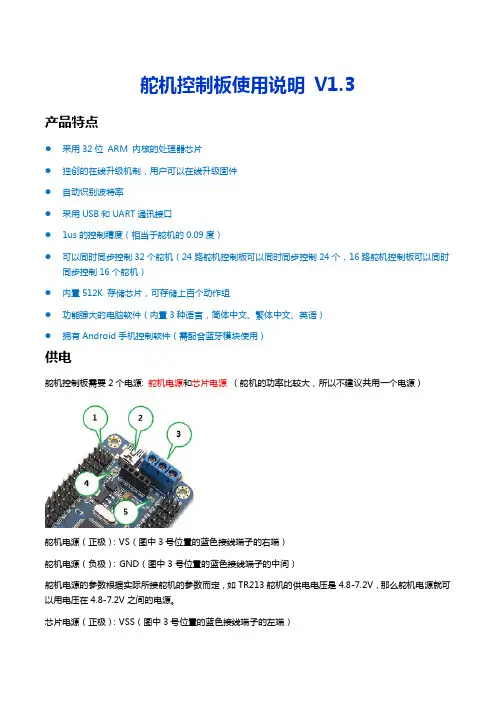
舵机控制板使用说明V1.3产品特点●采用32位ARM 内核的处理器芯片●独创的在线升级机制,用户可以在线升级固件●自动识别波特率●采用USB和UART通讯接口●1us的控制精度(相当于舵机的0.09度)●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时同步控制16个舵机)●内置512K 存储芯片,可存储上百个动作组●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语)●拥有Android手机控制软件(需配合蓝牙模块使用)供电舵机控制板需要2个电源: 舵机电源和芯片电源(舵机的功率比较大,所以不建议共用一个电源)舵机电源(正极):VS(图中3号位置的蓝色接线端子的右端)舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间)舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。
芯片电源(正极):VSS(图中3号位置的蓝色接线端子的左端)芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间)VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。
另外:1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。
2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必须是5V。
3. 1234. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表示芯片供电异常。
5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表示舵机供电异常。
2安装驱动驱动下载地址:/down/usc_driver.exe (全部是小写)直接双击usc_driver.exe ,点击下一步即可安装驱动。
艾尔赛舵机控制器LCSC-16型深圳市艾尔赛科技有限公司2018-12前言非常感谢购买深圳市艾尔赛科技有限公司舵机控制器,使用前请充分阅读本说明书。
常规安全概要请查看下列安全防范措施以避免受伤害并防止对本其相连接的产品造成伤害。
为了避免潜在的危险,请按详细说明来使用本产品。
》使用正确的电源线。
请使用满足国家标准的电源线。
》正确的连接和断开。
请按说明书上所说的方式连接和断开相关部件。
》不要在湿的或者潮湿的环境中操作。
》不要在爆炸性的空气中操作。
》保持产品洁净和干燥。
》防止静电损伤:静电释放<ESD )可能会对产品的电子部件造成损伤。
为了防止ESD,请小心处理产品电子部件部分,不要随意触摸电子部件上面的元器件。
不要将产品的电子部件放置在容易产生静电放电的表面。
目录一、概述5二、功能特点5三、硬件介绍和说明6四、软件操作81.指令命令格式82.使用串口调试助手83.使用LCSC上位机软件91>软件和驱动的安装92>软件使用说明10五、注意事项15六、联系我们16一、概述艾尔赛舵机控制器<LCSC)是艾尔赛科技有限公司的最新产品,拥有16路舵机PWM脉冲信号输出,可以同时对16个舵机进行任意角度和精确时间的控制。
使用灵活、高效!使你彻底摆脱繁琐的舵机控制算法,从严格的舵机PWM时序中解放出来,有更多的定时器资源和软件资源用在您更需要的地方。
该舵机控制器可以接收串口命令,适合任何含标准串口<RS232 电平)的系统,如个人电脑、工控机、PLC、51系列单片机、DSP、FPGA,ARM等等。
规格参数工作温度:0-85度工作湿度:5%-90%RH不凝结额定电源:DC4.0V-6.0V定时精度:0.5us控制精度:0.05度指定精度:0.01度二、功能特点由串口命令控制,操作简单,迅速响应命令,输出16路准确的舵机角度和动作时间的控制信号,多路同时控制,各自独立运行。
可无线控制,脱机运行。
PQ-7616十六路报警主机使用手册使用前请详细阅读本使用手册报警接口控制器可以接16路报警探头,8路可控制开关输出,DVR计算机系统对报警报警接口控制器进行单个或全部探头的布防、撤防、查询及开关控制等功能。
1、主要功能:16路报警输入,8路开关输出(常开)。
2、联动方式:由主机软件任意设定。
3、主要特性:●在本设备中采用抗干扰性强的MICROCHIP的PIC单片机,硬件看门狗,在强干扰时可自动复位CPU,抗干扰能力极强。
●16路报警探头,采用标准报警接口,开路、短路都报警。
●提供通迅协议“DCTRLS”(说明书最后一页)。
可以16个主机级联,最多可接256个报警探头。
4、技术参数:输入电源:DC12V输出电源:DC12V/400mA,可作为小功率的外部设备电源。
辅助开关:8个常开开关、容量为AC220V/2A,由主机控制其开或关。
通迅方试:RS485、RS232 \9600,N,1;其中RS485接口用于多个主机一起工作使用。
支持协议:DCTRLS、W110、RM110、_____可按用户要求定做温度范围:室内型-10℃~70℃.5、接线图:注:DC12V+/DC12V-为电源输出端子,可做为小功率的外部设备的电源。
6、面板指示说明:●ralay switch output继电器开关输出指示灯:亮-表示继电器闭合;灭表示继电器断开。
●Alarm in 报警信号输入指示灯:长亮-表示报警设防;闪烁表示报警(有的主机有设防功能,有的没有,但不应响报警)。
●通讯指示灯:当与主机设置协议与地址码一致时,主机正常工作时,指示灯闪烁。
7、报警探头的接线方法:在报警探头的常闭触点串联一个2.2K的电阻,接线如下图,S为信号、╧为地线。
8、9、地址码设置:请根据主机协议要求选择地址设定报警主机协议注:1、开机在报警检测状态。
主机以查询方式查询报警,分机收到查询后回送报警检测数据。
2、CH为校验和=前5位数据和的低8位。
舵机的使用方法舵机是一种常用的电子元件,广泛应用于机器人、航模、船模等领域。
它通过接收控制信号来控制舵机的转动角度,从而实现对机械臂、舵面等部件的精确控制。
本文将介绍舵机的使用方法,包括舵机的连接、控制信号的发送和常见问题的解决。
一、舵机的连接舵机通常有三根线,分别是电源线、地线和控制信号线。
其中电源线用于连接舵机的供电源,地线用于连接电源的地线,控制信号线用于接收控制信号。
舵机的电源通常需要直流电压供应,常见的电压为5V或6V。
可以通过将电源线连接到电源模块或电池组来为舵机提供电源。
地线需要与电源的地线连接,以确保电路的闭合。
通常,地线可以直接连接到电源的负极或者控制板上的地线引脚。
控制信号线则需要接收控制信号,通常是一个PWM信号。
可以将控制信号线连接到控制板上的一个数字引脚,通过控制板发送PWM信号来控制舵机的转动角度。
二、控制信号的发送舵机的转动角度是由控制信号的脉冲宽度来决定的。
通常,一个周期的脉冲宽度为20ms,其中高电平的持续时间决定了舵机的转动角度。
舵机通常有一个工作范围,一般是0°到180°。
在这个范围内,舵机的转动角度与脉冲宽度之间有一个线性关系。
具体地,当脉冲宽度为1ms时,舵机会转到最小角度;当脉冲宽度为1.5ms时,舵机会转到中间位置;当脉冲宽度为2ms时,舵机会转到最大角度。
因此,要控制舵机的转动角度,只需要发送相应脉冲宽度的控制信号即可。
可以通过控制板上的PWM输出来发送控制信号,使用编程语言编写相应的代码来控制舵机的转动角度。
三、常见问题的解决在使用舵机的过程中,可能会遇到一些常见问题,下面介绍几种常见问题的解决方法。
1. 舵机不转动或转动异常:首先检查舵机的电源是否正常供电,确认电源线和地线连接正确。
然后检查控制信号线是否连接到正确的引脚上,并确保发送的控制信号正确。
2. 舵机转动角度不准确:检查控制信号的脉冲宽度是否正确,可以通过调整控制信号的宽度来校准舵机的转动角度。
舵机控制软件使用说明一、驱动安装1、运行驱动程序文件夹下的CDM.exe文件,驱动所需的文件将自动复制到系统目录中。
2、连接控制板USB线,系统将自动识别,并且安装驱动程序。
3、安装好后会在生成一个虚拟的串口,串口号可以到设备管理器->端口找到。
二、软件使用1、端口打开舵机控制软件,如果前面的USB驱动安装正确,在端口下拉框中就会显示串口号COMxx(xx表示编号),选择好端口后按连接。
2、Box (每个BOX对应一路舵机)1、拖动Box里的滑竿,控制板的LED灯就会闪烁。
如果连上舵机(舵机供电也需要连上),舵机将跟随滑竿动作。
2、打开软件时,默认BOX将会分4行并排显示,并且BOX是不能被拖动的。
3、BOX手动布局单击“BOX布局设置->进入BOX编辑模式”进入BOX编辑模式。
在此模式下,可以拖动BOX位置、隐藏\显示BOX.隐藏\显示BOX单击对应的按钮,将可以隐藏\显示BOX。
4、BOX设置设置对话框。
单击BOX上的按钮,将弹出Box设置名称----BOX标题栏上显示的名字。
颜色----BOX外观颜色。
设置滑竿移动范围----用来限制BOX上滑竿可以移动的范围(可以有效防止调正动作中,超过一些舵机的极限值,造成对舵机的损伤)。
5、布局好所需的BOX后,点击“BOX布局设置->进入BOX编辑模式”后,将锁定BOX的位置。
单击“工程->保存”就可以保存BOX布局。
控制板是以动作组的方式来管理动作数据,最多可以管理128组,编号是0-127,每一组动作可以保存255步。
每一步至少要包含一路舵机,最多可以32路。
通过软件生成动作数据前,必须要先添加动作序列。
单击“动作序列->添加”后,将弹出动作组编号----就是下载到控制板,动作组的编号范围是0-127存储起始地址----动作下载到控制板存储器的起始地址。
起始地址不能低于256,不能高于65535-此组动作占用空间。
舵机控制器上位机软件使用说明软件安装软件安装如下图所示,点击安装文件目录下setup.exe文件,按照弹出对话框提示点击相对应按钮即可。
安装完成后,在桌面生成DJCtrl快捷方式图标。
界面介绍安装成功后点击桌面DJCtrl快捷方式图标运行程序,界面如下图所示:菜单在菜单——文件中点击“串口设置”后弹出设置串口对话框,设置对应串口参数(除了“串口号”,其它参数默认即可),完成后点击“应用设置”和“退出”按钮,最后点击文件中“打开串口”,打开串口。
总控帧总控帧界面里可以设置各个控制器组件的给定值,填写完成后点击“确认数据”按钮(注:如果不点击该按钮,上述填写的值无效),点击“启动”按钮主机执行每50ms发送一次总控帧操作,点击“单次发送”按钮主机执行一次总控帧发送操作。
单控帧在各文本框中填写对应信息,点击“确认按钮”后,点击“启动”按钮主机执行每50ms发送一次单控帧操作,点击“单次发送”按钮主机执行一次总控帧发送操作。
页面右侧显示返回的状态帧信息,如果没有返回状态帧,会弹出对话框提示。
查询帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次查询帧发送操作,页面右侧显示返回的状态帧信息,如果没有返回状态帧,会弹出对话框提示。
静默帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次静默帧发送操作。
启动帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次启动帧发送操作,页面右侧显示返回的状态帧信息,如果没有返回状态帧,会弹出对话框提示。
地址注入帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次地址注入帧发送操作。
参数注入帧在对应文本框中填写对应信息,按顺序点击“确认数据”和“发送”按钮,主机执行一次参数注入帧发送操作,页面右侧显示返回的状态帧信息,如果没有返回帧,会弹出对话框提示。
参数读取命令帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次参数读取帧发送操作,页面右侧显示返回的参数数据帧信息,如果没有返回帧,会弹出对话框提示。
FH24路舵机控制器使用说明书飞鸿科技2012-5-24一、产品介绍 (1)二、功能特点 (3)三、接口说明 (4)四、指令说明 (6)五、16路舵机调试软件使用说明 (7)二、连接PC上位机 (9)三、上位机界面编辑 (10)四、单路舵机调试 (11)五、动作组编辑 (12)六、注意事项及故障解决 (13)产品介绍一、一、产品介绍设计该舵机控制板是为了方便新手学习多路舵机的控制。
多路舵机控制并不很复杂,但至今网上关于多路舵机控制的资源很少,当前淘宝上的舵机控制板也都不提供程序代码。
由于这些原因,大批的机器人爱好者不能掌握多路舵机控制。
使得很多机器人爱好者停滞不前,在这些最基本的地方浪费大量时间,不能不精力放到更高层的机器人控制方面的研究。
如果每个人都从头做起,整体的进步必将非常的缓慢。
别人做好的东西我们不妨拿来学习,这样要节省很多的时间与精力。
在这个基础上继续前进,做出属于自己的更高级的机器人。
由于本人在这些基础的东西上耗费的大量的精力,导致我没有时间去做高级的控制,如自平衡,语音识别等。
大学接近尾声,没能让自己的机器人进一步升级感到非常遗憾。
基于方便学习的原则,本板子的设计有一下几个特点:1、选用大家熟悉的,容易掌握的51单片机。
但不是普通51单片机,是功能强大的增强型单片机STC12C5A60S2。
有人说51控制的精度肯定不如ARM。
是的,这是明显的事实。
但是我用ARM的芯片来写教程,只能给少数人看,而且如果那个人ARM掌握的都很好了,也不需要看此教程了。
该控制板设计的目的就是给机器人初级爱好者学习,仅仅因为这一点,选择51单片机是最恰当不过了。
我最初做的32路舵机控制板就是在arm芯片上做的,那些不适合新手学习,在51上学会了舵机控制的基本方法,等你会使用更高级单片机的时候可以很容易的移植到上面,实现更多舵机,更高精度的控制。
STC12C5A60S2单片机属于增强型51。
他兼容传统的51单片机,也就是说,你原来的学习的、编写的51程序不用改动就能在这个单片机上直接使用,不会出现问题,而且速度提高8~12倍。
16通道伺服舵机控制器使用说明设计者:翁旭辉西北工业大学机电学院<一>作品设计背景在当今机器人制作领域,控制系统部分作为机器人DIY一族公认为最难以实现的部分,爱好者普遍采用51或52系列单片机,但是存在一个普遍问题,传统的51系列的单片机远远不能满足机器人的高精度的控制需要;A TMEL公司的A VRmega高速嵌入式单片机,采用RISK精简指令集,指令执行速度为51单片机的10倍以上,且驱动电流大,功能齐全,具有ISP在线编程功能和软件模拟仿真调试功能,适合业余制作机器人需要,同时又可满足目前机器人(尤其是仿生机器人和带有表演性质的机器人)的控制要求。
本作品为在A VR系列mega8515L单片机基础上开发的伺服电机控制系统之一,它可以控制16路伺服舵机、解决了DIY机器人制作领域的基本动作控制要求,同时本系统板留有万用实验板部分,可以加入红外传感、点阵或语音电路等实现机器人的智能控制。
本作品已经在校机器人创新基地经过验证,确实具有很高的推广价值。
<二>工作原理及电路图此伺服电机控制系统的主体线路有A VRmega8515L单片机,RS232通讯部件、I2C总线插座、16路伺服舵机控制接口、8MHZ晶体、A VR-ISP编程下载接口。
见图1。
图1当用串口调试舵机的动作指令时,单片机通过RS232串口与PC机COM1口实时通讯:PC 终端拖动控制滑杆发出动作数据,单片机将数据处理后由定时器1引用中断产生0.5ms开始脉宽和5ms以上的间隔脉宽信号,由定时器0引用中断产生伺服电机动作所需的脉宽,由于串口通讯的实时性,舵机可以动态的跟踪信号的变化。
关键芯片为MAX232,DIP16封装。
<三>详细使用说明1.伺服舵机的实时调试模式:首先将主单片机的PB0口的跳线接至高电平,将串口接好PC机和单片机,打开16通道舵机控制器并启动滑竿,然后打开单片机+6V电源,拖动滑竿,如果舵机能实时跟踪滑块的动作,说明通讯正常。
舵机控制板使用说明V3.0规格参数1. 舵机电源和控制板电源分开,独立供电2. 控制通道:同时控制 16 路。
(24路舵机控制板可以控制24路)(舵机速度可调)3. 通讯输入:USB 或者串口(TTL)4. 信号输出:PWM(精度 0.5u s)。
5. 舵机驱动分辨率:0.5us , 0.045 度。
6. 波特率范围:9600 19200 38400 57600 115200 128000。
7. 支持的舵机: Futaba 、 Hitec 、辉盛、春天,等市面上98%以上的舵机8. PCB 尺寸:63.5mm×43.5mm。
9. 安装孔间距:51*43.5mm。
10.存储空间:512k。
1)供电说明本模块电源部分是分离设计的,控制板电源和舵机电源是分开供电的,这样不会相互干扰。
a)控制板电源VSSUSB 接口和蓝色端子中的 VSS 和 GND 都可以给控制板供电,两者任选一种即可。
(VSS 的供电范围是 6.5-12V)b)舵机电源VS舵机的供电情况是根据使用的舵机而定,可以查阅舵机的相关参数,若你不了解,可以使用5V 供电。
VS 输入多少付电压,给舵机的就是多少付的电压,所以必须严格匹配舵机的电压参数舵机电源输入接口为蓝色接线端子中的 VS 和 GND。
(控制板电源和舵机电源中的GND 是共用的)常规舵机的电压参数MG995、MG996 供电电压为 4.8-6.8V TR213、 TR223、1501MG 供电电压为 4.8-7V TR227 供电电压 4.8-7.2V未知舵机,请给 5V 供电(标准舵机 99%都可以用 5V 供电)如果供电电压超过舵机的范围,有可能造成舵机烧坏,或者烧坏舵机控制板。
请用户谨慎操作,查看舵机的相关参数。
舵机电源的其他说明请看倒数第二页。
2)安装驱动驱动下载地址:/down/usc_driver.exe (全部小写)直接双击 USC_driver.exe ,点击下一步即可安装驱动。
16 路舵机驱动板程序使用说明
用Arduino 类库驱动舵机并不是一件难事,如果需要驱动很多电机,就需要要占用更多的引脚,也会影响到Arduino 的处理能力。
专门的舵机驱
动板很好的解决了这个问题。
此舵机驱动板使用PCA9685 芯片,是16 通道12bi tPWM 舵机驱动,用12 个弓|脚通过I2C 就可以驱动16 个舵机。
不仅如此,你还可以通过级联的方式最多级联62 个驱动板,总共可以驱动992 个舵机!
供电部分
大多数的舵机设计电压都是在5~6V,尤其在多个舵机同时运行时,
跟需要有大功率的电源供电。
如果直接使用Arduino 5V 弓|脚直接为舵机供电,会出现一些难以预测的问题,所以我们建议你能有个合适的外部电源为
驱动板供电。
连接舵机。