大学物理学_第四章机械振动
- 格式:ppt
- 大小:1.98 MB
- 文档页数:48

《大学物理学》机械振动自主学习材料一、选择题9-1.一个质点作简谐运动,振幅为A ,在起始时质点的位移为2A -,且向x 轴正方向运动,代表此简谐运动的旋转矢量为( )【旋转矢量转法判断初相位的方法必须掌握】9-2.已知某简谐运动的振动曲线如图所示,则此简谐运动的运动方程(x 的单位为cm ,t 的单位为s )为( )(A )222cos()33x t ππ=-;(B )222cos()33x t ππ=+;(C )422cos()33x t ππ=-;(D )422cos()33x t ππ=+。
【考虑在1秒时间内旋转矢量转过3ππ+,有43πω=】9-3.两个同周期简谐运动的振动曲线如图所示,1x 的相位比2x 的相位( )(A )落后2π; (B )超前2π; (C )落后π; (D )超前π。
【显然1x 的振动曲线在2x 曲线的前面,超前了1/4周期,即超前/2π】9-4.当质点以频率ν作简谐运动时,它的动能变化的频率为( ) (A )2ν; (B )ν; (C )2ν; (D )4ν。
【考虑到动能的表达式为22211sin ()22kE mv kA t ωϕ==+,出现平方项】9-5.图中是两个简谐振动的曲线,若这两个简谐振动可叠加,则合成的余弦振动的初相位为( )(A )32π; (B )2π; (C )π; (D )0。
【由图可见,两个简谐振动同频率,相位相差π,所以,则合成的余弦振动的振幅应该是大减小,初相位是大的那一个】9--1.一物体悬挂在一质量可忽略的弹簧下端,使物体略有位移, 测得其振动周期为T ,然后将弹簧分割为两半,并联地悬挂同 一物体,再使物体略有位移,测得其振动周期为'T ,则()A ()B()C()D )s--'/T T 为( )(A )2; (B )1; (C; (D )12。
【弹簧串联的弹性系数公式为12111k k k =+串,弹簧对半分割后,其中一根的弹性系数为2k ,两弹簧并联后形成新的弹簧整体,弹性系数为4k ,公式为12k k k =+并,利用ω=2T πω=,所以,'22T T π==】9--2.一弹簧振子作简谐运动,当位移为振幅的一半时,其动能为总能量的( ) (A )12;(B;(C)2;(D )34。
简谐运动在弹簧下端挂一个小球,拉一下小球,它就以原来的平衡位置为中心上下做往复运动。
物体在平衡位置附近所做的往复运动,叫做机械振动,通常简称为振动。
振动现象在自然界中是广泛存在的.研究振动要从最简单、最基本的振动着手,这种振动叫做简谐运动。
弹簧振子把一个有孔的小球安在弹簧的一端,弹簧的另一端固定,小球穿在光滑的水平杆上,可以在杆上滑动,小球和水平杆之间的摩擦忽略不计,弹簧的质量比小球的质量小得多,也可忽略不计。
这样的系统称为弹簧振子,其中的小球常称为振子。
振子在振动过程中,所受的重力和支持力平衡,对振子的运动没有影响.使振子发生振动的只有弹簧的弹力,这个力的方向跟振子偏离平衡位置的位移方向相反,总指向平衡位置,它的作用是使振子能返回平衡位置,所以叫做回复力.根据胡克定律,在弹簧发生弹性形变时,弹簧振子的回复力F跟振子偏离平衡位置的位移x成正比,即式中的k是比例常数,也就是弹簧的劲度,负号表示回复力的方向跟振子偏离平衡位置的位移方向相反.简谐运动的条件物体在跟偏离平衡位置的位移大小成正比,并且总指向平衡位置的回复力的作用下的振动,叫做简谐运动.简谐运动是最简单、最基本的机械振动,图中表示了简谐运动的几个实例.振幅、周期和频率描述简谐运动的物理量有振幅、周期和频率.振幅振动物体离开平衡位置的最大距离,叫做振动的振幅.用A表示.振幅是表示振动强弱的物理量.周期做简谐运动的物体完成一次全振动所需要的时间,叫做振动的周期.用T表示.频率单位时间内完成的全振动的次数,叫做振动的频率.用f表示.周期和频率都是表示振动快慢的物理量.周期越短,频率越大,表示振动越快.它们的关系是在国际单位制中,周期的单位是秒,频率的单位是赫兹,简称赫,符号是Hz.1 Hz = 1 s-1.1s内完成n次全振动,频率就是n,单位是Hz.简谐运动的频率由振动系统本身的性质所决定.如弹簧振子的频率由弹簧的劲度和振子的质量所决定,与振幅的大小无关,因此又称为振动系统的固有频率.单摆单摆如果悬挂小球的细线的伸缩和质量可以忽略,线长又比球的直径大得多,这样的装置就叫做单摆.单摆是实际摆的理想化的物理模型.在研究摆球沿圆弧的运动情况时,可以不考虑与摆球运动方向垂直的力,而只考虑沿摆球运动方向的力.当摆球运动到任一点P时,其中l为摆长,x为摆球偏离平衡位置的位移,负号表示回复力F与位移x的方向相反.由于m、g、l都有一定的数值,mg/l可以用一个常数表示,上式可以写成可见,在偏角很小的情况下,单摆所受的回复力与偏离平衡位置的位移成正比而方向相反,单摆做简谐运动.单摆振动的周期性单摆的周期跟哪些因素有关呢?我们用实验研究这个问题.大量实验表明,单摆的周期跟单摆的振幅没有关系; 跟摆球的质量没有关系;跟摆长有关系, 摆长越长,周期越大.荷兰物理学家惠更斯(1629—1695)研究了单摆的振动,发现单摆做简谐运动的周期T跟摆长l的二次方根成正比,跟重力加速度g的二次方根成反比,跟振幅、摆球的质量无关,并且确定了如下的单摆周期的公式:摆在实际中有很多应用,利用摆的等时性发明了带摆的计时器,摆的周期可以通过改变摆长来调节,计时很方便.另外,单摆的周期和摆长容易用实验准确地测定出来,所以可利用单摆准确地测定各地的重力加速度.简谐运动的图象做简谐运动的物体,它的运动情况也可以用图象直观地表示出来.把沙流形成的图象画在纸上,就是振动图象. 以横轴OO’表示时间,以纵轴表示位移, 则振动图象表示了振动质点的位移随时间变化的规律,可以看出所有简谐运动的振动图象都是正弦或余弦曲线.利用振动图象,可以知道振动物体的振幅和周期,可以求出任意时刻振动质点对平衡位置的位移.记录振动的方法在实际中有很多应用.医院里的心电图仪,监测地震的地震仪等,都是用这种方法记录振动情况的.简谐运动的能量阻尼振动简谐运动的能量弹簧振子和单摆在振动过程中动能和势能不断地发生转化.在平衡位置时,动能最大,势能最小;在位移最大时,势能最大,动能为零.在任意时刻动能和势能的总和,就是振动系统的总机械能.弹簧振子和单摆是在弹力或重力的作用下发生振动的,如果不考虑摩擦和空气阻力,只有弹力或重力做功,那么振动系统的机械能守恒.振动系统的机械能跟振幅有关,振幅越大,机械能就越大.对简谐运动来说,一旦供给振动系统以一定的能量,使它开始振动,由于机械能守恒,它就以一定的振幅永不停息地振动下去.简谐运动是一种理想化的振动.阻尼振动实际的振动系统不可避免地要受到摩擦和其他阻力,即受到阻尼的作用.系统克服阻尼的作用做功,系统的机械能就要损耗.系统的机械能随着时间逐渐减少,振动的振幅也逐渐减小,待到机械能耗尽之时,振动就停下来了.这种振幅逐渐减小的振动,叫做阻尼振动.该图是阻尼振动的振动图象.振动系统受到的阻尼越大,振幅减小得越快,振动停下来也越快.阻尼过大时,系统将不能发生振动.阻尼越小,振幅减小得越慢.受迫振动共振受迫振动阻尼振动最终要停下来,那么怎样才能得到持续的周期性振动呢?最简单的办法是用周期性的外力作用于振动系统,外力对系统做功,补偿系统的能量损耗,使系统持续地振动下去.这种周期性的外力叫做驱动力,物体在外界驱动力作用下的振动叫做受迫振动.跳板在人走过时发生的振动,机器底座在机器运转时发生的振动,都是受迫振动的实例.受迫振动的频率跟什么有关呢?我们用如图所示的装置研究这个问题.匀速地转动把手时,把手给弹簧振子以驱动力,使振子做受迫振动.这个驱动力的周期跟把手转动的周期是相同的.用不同的转速匀速地转动把手.可以看到,振子做受迫振动的周期总等于驱动力的周期.实验表明,物体做受迫振动时,振动稳定后的频率等于驱动力的频率,跟物体的固有频率没有关系.共振虽然物体做受迫振动的频率跟物体的固有频率无关,但是不同的受迫振动的频率,随着它接近物体的固有频率的程度不同,振动的情况也大为不同.我们来观察下面的实验在一根张紧的绳上挂几个摆,其中A、B、C的摆长相等,摆的频率决定于摆长.当A摆振动的时候,通过张紧的绳子给其他各摆施加驱动力,使其余各摆做受迫振动.这个驱动力的频率等于A摆的频率.实验表明:固有频率跟驱动力频率相等的B摆和C摆,振幅最大;固有频率跟驱动力频率相差最大的D摆,振幅最小.图中所示的曲线表示受迫振动的振幅A与驱动力的频率f的关系.可以看出:驱动力的频率f等于振动物体的固有频率f’时,振幅最大;驱动力的频率f跟固有频率f’相差越大,振幅越小.驱动力的频率跟物体的固有频率相等时,受迫振动的振幅最大,这种现象叫做共振.共振的应用和防止共振现象有许多应用.把一些不同长度的钢片装在同一个支架上,可用来制成测量发动机转速的转速计.使转速计与开动着的机器紧密接触,机器的振动引起转速计的轻微振动,这时固有频率与机器转速一致的那个钢片发生共振,有显著的振幅.从刻度上读出这个钢片的固有频率,就可以知道机器的转速.共振筛是利用共振现象制成的.把筛子用四根弹簧支起来,在筛架上安装一个偏心轮,就成了共振筛.偏心轮在发动机的带动下发生转动时,适当调节偏心轮的转速,可以使筛子受到的驱动力的频率接近筛子的固有频率,这时筛子发生共振,有显著的振幅,提高了筛除杂物的效率.在某些情况下,共振也可能造成损害.军队或火车过桥时,整齐的步伐或车轮对铁轨接头处的撞击会对桥梁产生周期性的驱动力,如果驱动力的频率接近桥梁的固有频率,就可能使桥梁的振幅显著增大,以致使桥梁发生断裂.因此,部队过桥要用便步,以免产生周期性的驱动力.火车过桥要慢开,使驱动力的频率远小于桥梁的固有频率.轮船航行时,如果所受波浪冲击力的频率接近轮船左右摇摆的固有频率,可能使轮船倾覆.这时可以改变轮船的航向和速度,使波浪冲击力的频率远离轮船摇摆的固有频率.机器运转时,零部件的运动(如活塞的运动、轮的转动)会产生周期性的驱动力,如果驱动力的频率接近机器本身或支持物的固有频率,就会发生共振,使机器或支持物受到损坏.这时要采取措施,如调节机器的转速,使驱动力的频率与机器或支持物的固有频率不一致.同样,厂房建筑物的固有频率也不能处在机器所能引起的振动频率范围之内.总之,在需要利用共振时,应使驱动力的频率接近或等于振动物体的固有频率;在需要防止共振时,应使驱动力的频率与振动物体的固有频率不同,而且相差越大越好.。

第四章机械振动4.1一物体沿x 轴做简谐振动,振幅A = 0.12m ,周期T = 2s .当t = 0时,物体的位移x = 0.06m ,且向x 轴正向运动.求:(1)此简谐振动的表达式;(2)t = T /4时物体的位置、速度和加速度;(3)物体从x = -0.06m ,向x 轴负方向运动第一次回到平衡位置所需的时间. [解答](1)设物体的简谐振动方程为x = A cos(ωt + φ),其中A = 0.12m ,角频率ω = 2π/T = π.当t = 0时,x = 0.06m ,所以cos φ = 0.5,因此φ = ±π/3. 物体的速度为v = d x /d t = -ωA sin(ωt + φ).当t = 0时,v = -ωA sin φ,由于v > 0,所以sin φ< 0,因此:φ = -π/3.简谐振动的表达式为:x = 0.12cos(πt – π/3).(2)当t = T /4时物体的位置为;x = 0.12cos(π/2 – π/3) = 0.12cosπ/6 = 0.104(m). 速度为;v = -πA sin(π/2 – π/3) = -0.12πsinπ/6 = -0.188(m·s -1).加速度为:a = d v /d t = -ω2A cos(ωt + φ)= -π2A cos(πt - π/3)= -0.12π2cosπ/6 = -1.03(m·s -2). (3)方法一:求时间差.当x = -0.06m 时,可得cos(πt 1 - π/3) = -0.5, 因此πt 1 - π/3 = ±2π/3.由于物体向x 轴负方向运动,即v < 0,所以sin(πt 1 - π/3) > 0,因此πt 1 - π/3 = 2π/3,得t 1 = 1s .当物体从x = -0.06m 处第一次回到平衡位置时,x = 0,v > 0,因此cos(πt 2 - π/3) = 0, 可得 πt 2 - π/3 = -π/2或3π/2等.由于t 2> 0,所以πt 2 - π/3 = 3π/2, 可得t 2 = 11/6 = 1.83(s).所需要的时间为:Δt = t 2 - t 1 = 0.83(s).方法二:反向运动.物体从x = -0.06m ,向x 轴负方向运动第一次回到平衡位置所需的时间就是它从x = 0.06m ,即从起点向x 轴正方向运动第一次回到平衡位置所需的时间.在平衡位置时,x = 0,v < 0,因此cos(πt - π/3) = 0,可得 πt - π/3 = π/2,解得t = 5/6 = 0.83(s).[注意]根据振动方程x = A cos(ωt + φ),当t = 0时,可得φ = ±arccos(x 0/A ),(-π<φ<= π), 初位相的取值由速度决定.由于v = d x /d t = -ωA sin(ωt + φ),当t = 0时,v = -ωA sin φ,当v > 0时,sin φ< 0,因此 φ = -arccos(x 0/A );当v < 0时,sin φ> 0,因此φ = arccos(x 0/A )π/3.可见:当速度大于零时,初位相取负值;当速度小于零时,初位相取正值.如果速度等于零,当初位置x 0 = A 时,φ = 0;当初位置x 0 = -A 时,φ = π.4.2已知一简谐振子的振动曲线如图所示,试由图求:(1)a ,b ,c ,d ,e 各点的位相,及到达这些状态的时刻t 各是多少?已知周期为T ; (2)振动表达式; (3)画出旋转矢量图. [解答]方法一:由位相求时间.(1)设曲线方程为x = A cos Φ,其中A 表示振幅,Φ = ωt + φ表示相位. 由于x a = A ,所以cos Φa = 1,因此Φa = 0.由于x b = A /2,所以cos Φb = 0.5,因此Φb = ±π/3;由于位相Φ随时间t 增加,b 点位相就应该大于a 点的位相,因此Φb = π/3.由于x c = 0,所以cos Φc = 0,又由于c 点位相大于b 位相,因此Φc = π/2.同理可得其他两点位相为:Φd = 2π/3,Φe = π.c 点和a 点的相位之差为π/2,时间之差为T /4,而b 点和a 点的相位之差为π/3,时间之差应该为T /6.因为b 点的位移值与O 时刻的位移值相同,所以到达a 点的时刻为t a = T /6. 到达b 点的时刻为t b = 2t a = T /3.图4.2到达c 点的时刻为t c = t a + T /4 = 5T /12. 到达d 点的时刻为t d = t c + T /12 = T /2. 到达e 点的时刻为t e = t a + T /2 = 2T /3.(2)设振动表达式为:x = A cos(ωt + φ),当t = 0时,x = A /2时,所以cos φ = 0.5,因此φ =±π/3; 由于零时刻的位相小于a 点的位相,所以φ = -π/3, 因此振动表达式为. 另外,在O 时刻的曲线上作一切线,由于速度是位置对时间的变化率,所以切线代表速度的方向;由于其斜率大于零,所以速度大于零,因此初位相取负值,从而可得运动方程.(3)如图旋转矢量图所示.方法二:由时间求位相.将曲线反方向延长与t 轴 相交于f 点,由于x f = 0,根据运动方程,可得所以:.显然f 点的速度大于零,所以取负值,解得t f = -T /12.从f 点到达a 点经过的时间为T /4,所以到达a 点的时刻为:t a = T /4 + t f = T /6, 其位相为:. 由图可以确定其他点的时刻,同理可得各点的位相.4.3 有一弹簧,当其下端挂一质量为M 的物体时,伸长量为9.8×10-2m .若使物体上下振动,且规定向下为正方向.(1)t = 0时,物体在平衡位置上方8.0×10-2m 处,由静止开始向下运动,求运动方程;(2)t = 0时,物体在平衡位置并以0.60m·s -1速度向上运动,求运动方程. [解答]当物体平衡时,有:Mg – kx 0 = 0, 所以弹簧的倔强系数为:k = Mg/x 0, 物体振动的圆频率为:s -1). 设物体的运动方程为:x = A cos(ωt + φ).(1)当t = 0时,x 0 = -8.0×10-2m ,v 0 = 0,因此振幅为:=8.0×10-2(m);由于初位移为x 0 = -A ,所以cos φ = -1,初位相为:φ = π. 运动方程为:x = 8.0×10-2cos(10t + π).(2)当t = 0时,x 0 = 0,v 0 = -0.60(m·s -1),因此振幅为:v 0/ω|=6.0×10-2(m);由于cos φ = 0,所以φ = π/2;运动方程为:x = 6.0×10-2cos(10t +π/2).4.4 质量为10×10-3kg 的小球与轻弹簧组成的系统,按的规律作振动,式中t 以秒(s)计,x 以米(m)计.求: (1)振动的圆频率、周期、振幅、初位相; (2)振动的速度、加速度的最大值;(3)最大回复力、振动能量、平均动能和平均势能;cos(2)3t x A T ππ=-cos(2)03t T ππ-=232f t Tπππ-=±203a a t T πΦπ=-=ω==0||A x ==A =20.1cos(8)3x t ππ=+(4)画出这振动的旋转矢量图,并在图上指明t 为1,2,10s 等各时刻的矢量位置. [解答](1)比较简谐振动的标准方程:x = A cos(ωt + φ),可知圆频率为:ω =8π,周期T = 2π/ω = 1/4 = 0.25(s),振幅A = 0.1(m),初位相φ = 2π/3.(2)速度的最大值为:v m = ωA = 0.8π = 2.51(m·s -1); 加速度的最大值为:a m = ω2A = 6.4π2 = 63.2(m·s -2). (3)弹簧的倔强系数为:k = mω2,最大回复力为:f = kA = mω2A = 0.632(N); 振动能量为:E = kA 2/2 = mω2A 2/2 = 3.16×10-2(J), 平均动能和平均势能为:= kA 2/4 = mω2A 2/4 = 1.58×10-2(J). (4)如图所示,当t 为1,2,10s 等时刻时,旋转矢量的位置是相同的.4.5 两个质点平行于同一直线并排作同频率、同振幅的简谐振动.在振动过程中,每当它们经过振幅一半的地方时相遇,而运动方向相反.求它们的位相差,并作旋转矢量图表示.[解答]设它们的振动方程为:x = A cos(ωt + φ), 当x = A /2时,可得位相为:ωt + φ = ±π/3.由于它们在相遇时反相,可取Φ1 = (ωt + φ)1 = -π/3,Φ2 = (ωt + φ)2 = π/3,它们的相差为:ΔΦ = Φ2 – Φ1 = 2π/3,或者:ΔΦ` = 2π –ΔΦ = 4π/3.矢量图如图所示.4.6一氢原子在分子中的振动可视为简谐振动.已知氢原子质量m = 1.68×10-27kg ,振动频率v = 1.0×1014Hz ,振幅A = 1.0×10-11m .试计算:(1)此氢原子的最大速度; (2)与此振动相联系的能量.[解答](1)氢原子的圆频率为:ω = 2πv = 6.28×1014(rad·s -1), 最大速度为:v m = ωA = 6.28×103(m·s -1).(2)氢原子的能量为:= 3.32×10-20(J).4.7 如图所示,在一平板下装有弹簧,平板上放一质量为1.0kg 的重物,若使平板在竖直方向上作上下简谐振动,周期为0.50s ,振幅为2.0×10-2m ,求:(1)平板到最低点时,重物对平板的作用力;(2)若频率不变,则平板以多大的振幅振动时,重物跳离平板? (3)若振幅不变,则平板以多大的频率振动时,重物跳离平板? [解答](1)重物的圆频率为:ω = 2π/T = 4π,其最大加速度为:a m = ω2A ,合力为:F = ma m ,方向向上.重物受到板的向上支持力N 和向下的重力G ,所以F = N – G . 重物对平板的作用力方向向下,大小等于板的支持力: N = G + F = m (g +a m ) = m (g +ω2A ) = 12.96(N).(2)当物体的最大加速度向下时,板的支持为:N = m (g - ω2A ). 当重物跳离平板时,N = 0,频率不变时,振幅为:A = g/ω2 = 3.2×10-2(m).(3)振幅不变时,频率为:3.52(Hz).4.8 两轻弹簧与小球串连在一直线上,将两弹簧拉长后系在固定点A 和B 之间,整个系统放在光滑水平面上.设两弹簧的原长分别为l 1和l 2,倔强系统分别为k 1和k 2,A和B 间距为L ,小球的质量为m .(1)试确定小球的平衡位置;k pE E =212m E mv=2ωνπ==(2)使小球沿弹簧长度方向作一微小位移后放手,小球将作振动,这一振动是否为简谐振动?振动周期为多少?[解答](1)这里不计小球的大小,不妨设L > l 1 + l 2,当小球平衡时,两弹簧分别拉长x 1和x 2,因此得方程:L = l 1 + x 1 + l 2 + x 2;小球受左右两边的弹簧的弹力分别向左和向右,大小相等,即k 1x 1 = k 2x 2. 将x 2 = x 1k 1/k 2代入第一个公式解得:.小球离A 点的距离为:.(2)以平衡位置为原点,取向右的方向为x 轴正方向,当小球向右移动一个微小距离x 时,左边弹簧拉长为x 1 + x ,弹力大小为:f 1 = k 1(x 1 + x ), 方向向左;右边弹簧拉长为x 1 - x ,弹力大小为:f 2 = k 2(x 2 - x ), 方向向右.根据牛顿第二定律得:k 2(x 2 - x ) - k 1(x 1 + x ) = ma ,利用平衡条件得:,即小球做简谐振动.小球振动的圆频率为:.4.9如图所示,质量为10g 的子弹以速度v = 103m·s -1水平射入木块,并陷入木块中,使弹簧压缩而作简谐振动.设弹簧的倔强系数k = 8×103N·m -1,木块的质量为4.99kg ,不计桌面摩擦,试求:(1)振动的振幅;(2)振动方程.[解答](1)子弹射入木块时,由于时间很短,木块还来不及运动,弹簧没有被压缩,它们的动量守恒,即:mv = (m + M)v 0.解得子弹射入后的速度为:v 0 = mv/(m + M) = 2(m·s -1),这也是它们振动的初速度.子弹和木块压缩弹簧的过程机械能守恒,可得:(m + M ) v02/2 = kA 2/2, 所以振幅为:10-2(m). (2)振动的圆频率为:= 40(rad·s -1).取木块静止的位置为原点、向右的方向为位移x 的正方向,振动方程可设为:x = A cos(ωt + φ).当t = 0时,x = 0,可得:φ = ±π/2;由于速度为正,所以取负的初位相,因此振动方程为:x = 5×10-2cos(40t - π/2).4.10如图所示,在倔强系数为k 的弹簧下,挂一质量为M 的托盘.质量为m 的物体由距盘底高h 处自由下落与盘发生完全非弹性碰撞,而使其作简谐振动,设两物体碰后瞬时为t = 0时刻,求振动方程.[解答]物体落下后、碰撞前的速度为:物体与托盘做完全非弹簧碰撞后,根据动量守恒定律可得它们的共同速度为,这也是它们振动的初速度.设振动方程为:x = A cos(ωt + φ),211212()k x L l l k k =--+211111212()k L l x l L l l k k =+=+--+2122d ()0d xm kk x t++=ω=22T πω==A v =ω=v =0m v v m M ==+图4.9 图4.10其中圆频率为:物体没有落下之前,托盘平衡时弹簧伸长为x 1,则:x 1 = Mg/k .物体与托盘磁盘之后,在新的平衡位置,弹簧伸长为x 2,则:x 2= (M + m )g/k . 取新的平衡位置为原点,取向下的方向为正,则它们振动的初位移为x 0 = x 1 - x 2 = -mg/k .因此振幅为:初位相为:4.11 装置如图所示,轻弹簧一端固定,另一端与物体m 间用细绳相连,细绳跨于桌边定滑轮M 上,m 悬于细绳下端.已知弹簧的倔强系数为k = 50N·m -1,滑轮的转动惯量J = 0.02kg·m 2,半径R = 0.2m ,物体质量为m = 1.5kg ,取g = 10m·s -2.(1)试求这一系统静止时弹簧的伸长量和绳的张力;(2)将物体m 用手托起0.15m ,再突然放手,任物体m 下落而整个系统进入振动状态.设绳子长度一定,绳子与滑轮间不打滑,滑轮轴承无摩擦,试证物体m 是做简谐振动; (3)确定物体m 的振动周期;(4)取物体m 的平衡位置为原点,OX 轴竖直向下,设振物体m 相对于平衡位置的位移为x ,写出振动方程.[解答](1)在平衡时,绳子的张力等于物体的重力T = G = mg = 15(N).这也是对弹簧的拉力,所以弹簧的伸长为:x 0 = mg/k = 0.3(m).(2)以物体平衡位置为原点,取向下的方向为正,当物体下落x 时,弹簧拉长为x 0 + x ,因此水平绳子的张力为:T 1 = k (x 0+ x ).设竖直绳子的张力为T 2,对定滑轮可列转动方程:T 2R – T 1R = Jβ, 其中β是角加速度,与线加速度的关系是:β = a/R .对于物体也可列方程:mg - T 2 = ma . 转动方程化为:T 2 – k (x 0 + x ) = aJ/R 2,与物体平动方程相加并利用平衡条件得:a (m + J/R 2) = –kx ,可得微分方程:,故物体做简谐振动. (3)简谐振动的圆频率为:s -1). 周期为:T 2 = 2π/ω = 1.26(s).(4)设物体振动方程为:x = A cos(ωt + φ),其中振幅为:A = 0.15(m). 当t = 0时,x = -0.15m ,v 0 = 0,可得:cos φ = -1,因此φ = π或-π, 所以振动方程为:x = 0.15cos(5t + π),或x = 0.15cos(5t - π).4.12一匀质细圆环质量为m ,半径为R ,绕通过环上一点而与环平面垂直的水平光滑轴在铅垂面内作小幅度摆动,求摆动的周期.[解答]通过质心垂直环面有一个轴,环绕此轴的转动惯量为:I c = mR 2.根据平行轴定理,环绕过O 点的平行轴的转动惯量为I = I c + mR 2 = 2mR 2.当环偏离平衡位置时,重力的力矩为:M = mgR sin θ, 方向与角度θ增加的方向相反.ω=A ==00arctan v x ϕω-==222d 0d /x kx t m J R +=+ω=根据转动定理得:Iβ = -M ,即,由于环做小幅度摆动,所以sin θ≈θ,可得微分方程:. 摆动的圆频率为:周期为:4.13 重量为P 的物体用两根弹簧竖直悬挂,如图所示,各弹簧的倔强系数标明在图上.试求在图示两种情况下,系统沿竖直方向振动的固有频率.[解答](1)前面已经证明:当两根弹簧串联时,总倔强系数为k = k1k 2/(k 1 + k 2),因此固有频率为(2)前面还证明:当两根弹簧并联时,总倔强系数等于两个弹簧的倔强系数之和,因此固有频率为.4.14质量为0.25kg 的物体,在弹性力作用下作简谐振动,倔强系数k = 25N·m -1,如果开始振动时具有势能0.6J ,和动能0.2J ,求:(1)振幅;(2)位移多大时,动能恰等于势能?(3)经过平衡位置时的速度.[解答]物体的总能量为:E = E k + E p = 0.8(J).(1)根据能量公式E = kA2/2,得振幅为:.(2)当动能等于势能时,即E k = E p ,由于E = E k + E p ,可得:E = 2E p ,即,解得:= ±0.179(m). (3)再根据能量公式E = mv m2/2,得物体经过平衡位置的速度为: 2.53(m·s -1).4.15 两个频率和振幅都相同的简谐振动的x-t 曲线如图所示,求: (1)两个简谐振动的位相差;(2)两个简谐振动的合成振动的振动方程. [解答](1)两个简谐振动的振幅为:A = 5(cm), 周期为:T = 4(s),圆频率为:ω =2π/T = π/2,它们的振动方程分别为:x 1 = A cos ωt =5cosπt /2, x 2 = A sin ωt =5sinπt /2 =5cos(π/2 - πt /2)即x 2=5cos(πt /2 - π/2).位相差为:Δφ = φ2 - φ1 = -π/2. (2)由于x = x 1 + x 2 = 5cosπt /2 +5sinπt /2 = 5(cosπt /2·cosπ/4 +5sinπt /2·sinπ/4)/sinπ/4 合振动方程为:(cm).22d sin 0d I mgR tθθ+=22d 0d mgRt Iθθ+=ω=222T πω===2ωνπ===2ωνπ===A =2211222kA kx =⨯/2x =m v =cos()24x t ππ=- (b)图4.134.16 已知两个同方向简谐振动如下:,.(1)求它们的合成振动的振幅和初位相; (2)另有一同方向简谐振动x 3 = 0.07cos(10t +φ),问φ为何值时,x 1 + x 3的振幅为最大?φ为何值时,x 2 + x 3的振幅为最小?(3)用旋转矢量图示法表示(1)和(2)两种情况下的结果.x 以米计,t 以秒计.[解答](1)根据公式,合振动的振幅为:=8.92×10-2(m). 初位相为:= 68.22°.(2)要使x 1 + x 3的振幅最大,则:cos(φ– φ1) = 1,因此φ– φ1 = 0,所以:φ = φ1 = 0.6π. 要使x 2 + x 3的振幅最小,则 cos(φ– φ2) = -1,因此φ– φ2 = π,所以φ = π + φ2 = 1.2π.(3)如图所示.4.17质量为0.4kg 的质点同时参与互相垂直的两个振动:, .式中x 和y 以米(m)计,t 以秒(s)计.(1)求运动的轨道方程;(2)画出合成振动的轨迹;(3)求质点在任一位置所受的力.[解答](1)根据公式:,其中位相差为:Δφ = φ2 – φ1 = -π/2,130.05cos(10)5x t π=+210.06cos(10)5x t π=+A =11221122sin sin arctancos cos A A A A ϕϕϕϕϕ+=+0.08cos()36x t ππ=+0.06cos()33y t ππ=-2222212122cos sin x y xyA A A A ϕϕ+-∆=∆所以质点运动的轨道方程为:. (2)合振动的轨迹是椭圆.(3)两个振动的圆频率是相同的ω = π/3,质点在x 方向所受的力为,即F x = 0.035cos(πt /3 + π/6)(N).在y 方向所受的力为,即F y = 0.026cos(πt /3 - π/3)(N).用矢量表示就是,其大小为,与x 轴的夹角为θ = arctan(F y /F x ).4.18 将频率为384Hz 的标准音叉振动和一待测频率的音叉振动合成,测得拍频为3.0Hz ,在待测音叉的一端加上一小块物体,则拍频将减小,求待测音叉的固有频率.[解答]标准音叉的频率为v 0 = 384(Hz), 拍频为Δv = 3.0(Hz), 待测音叉的固有频率可能是v 1 = v 0 - Δv = 381(Hz), 也可能是v 2 = v 0 + Δv = 387(Hz).在待测音叉上加一小块物体时,相当于弹簧振子增加了质量,由于ω2 = k/m ,可知其频率将减小.如果待测音叉的固有频率v 1,加一小块物体后,其频率v`1将更低,与标准音叉的拍频将增加;实际上拍频是减小的,所以待测音叉的固有频率v 2,即387Hz .4.19示波器的电子束受到两个互相垂直的电场作用.电子在两个方向上的位移分别为x = A cos ωt 和y = A cos(ωt +φ).求在φ = 0,φ = 30º,及φ = 90º这三种情况下,电子在荧光屏上的轨迹方程.[解答]根据公式,其中Δφ = φ2 – φ1 = -π/2,而φ1 = 0,φ2 = φ.(1)当Δφ = φ = 0时,可得,质点运动的轨道方程为y = x ,轨迹是一条直线.(2)当Δφ = φ = 30º时,可得质点的轨道方程, 即,轨迹是倾斜的椭圆.(3)当Δφ = φ = 90º时,可得, 即x 2 + y 2 = A 2,质点运动的轨迹为圆.4.20三个同方向、同频率的简谐振动为,,.222210.080.06x y +=22d d x x x F ma m t==20.08cos()6m t πωω=-+22d d y y y F ma m t==20.06cos()3m t ωω=--πi+j x y F F F =F =2222212122cos sin x y xyA A A A ϕϕ+-∆=∆2222220x y xyA A A+-=222214x y A+=222/4x y A +=22221x y A A +=10.08cos(314)6x t π=+20.08cos(314)2x t π=+350.08cos(314)6x t π=+求:(1)合振动的圆频率、振幅、初相及振动表达式; (2)合振动由初始位置运动到所需最短时间(A 为合振动振幅). [解答]合振动的圆频率为:ω = 314 = 100π(rad·s -1). 设A 0 = 0.08,根据公式得:A x = A 1cos φ1 + A 2cos φ2 + A 3cos φ3 = 0,A y = A 1sin φ1 + A 2sin φ2 + A 3sin φ3 = 2A 0 = 0.16(m), 振幅为:,初位相为:φ = arctan(A y /A x ) = π/2.合振动的方程为:x = 0.16cos(100πt + π/2).(2)当时,可得:,解得:100πt + π/2 = π/4或7π/4.由于t > 0,所以只能取第二个解,可得所需最短时间为t = 0.0125s .x A =A =/2x =cos(100/2)2t ππ+。

清华大学《大学物理》习题库试题及答案 04 机械振动习题清华大学《大学物理》习题库试题及答案--04-机械振动习题清华大学《大学物理》习题库试题及答案机械振动习题一、选择题:1.3001:把单摆摆球从平衡位置向位移正方向拉开,使摆线与竖直方向成一微小角度?,然后由静止放手任其振动,从放手时开始计时。
若用余弦函数表示其运动方程,则该单摆振动的初相为(a)?(b)?/2(c)0(d)??[]2.3002:两个质点各自作简谐振动,它们的振幅相同、周期相同。
第一个质点的振动方程为x1=acos(?t+?)。
当第一个质点从相对于其平衡位置的正位移处回到平衡位置时,第二个质点正在最大正位移处。
则第二个质点的振动方程为:11x2?acos(?tπ)x2?acos(?tπ)2(b)2(a)3x2?acos(?tπ)2(d)x2?acos(?t?)(c)[]3.3007:一质量为m的物体挂在劲度系数为k的轻弹簧下面,振动角频率为?。
若把此弹簧分割成二等份,将物体m挂在分割后的一根弹簧上,则振动角频率是(a)2??(b)2?(c)?/2(d)?/2[]4.3396:一质点作简谐振动。
其运动速度与时间的曲线如图所示。
若质点的振动规律v(m/s)用余弦函数叙述,则其初适当为vm(a)?/6(b)5?/612vm(c)-5?/6(d)-?/6o(e)-2?/3[]5.3552:一个弹簧振子和一个单摆(只考虑小幅度摆动),在地面上的固有振动周期分别为t1和t2。
将它们拿到月球上去,相应的周期分别为t1?和t2?。
则有(a)t1??t1且t2??t2(b)t1??t1且t2??t2(c)t1??t1且t2??t2(d)t1??t1且t2??t2[]t(s)1x?4?10?2cos(2?t??)3(si)。
6.5178:一质点沿x轴作四极振动,振动方程为从t=0时刻起,到质点位置在x=-2cm处,且向x轴正方向运动的最短时间间隔为11111sssss86432(a)(b)(c)(d)(e)[]7.5179:一弹簧振子,重物的质量为m,弹簧的劲度系数为k,该振子并作振幅为a 的四极振动。
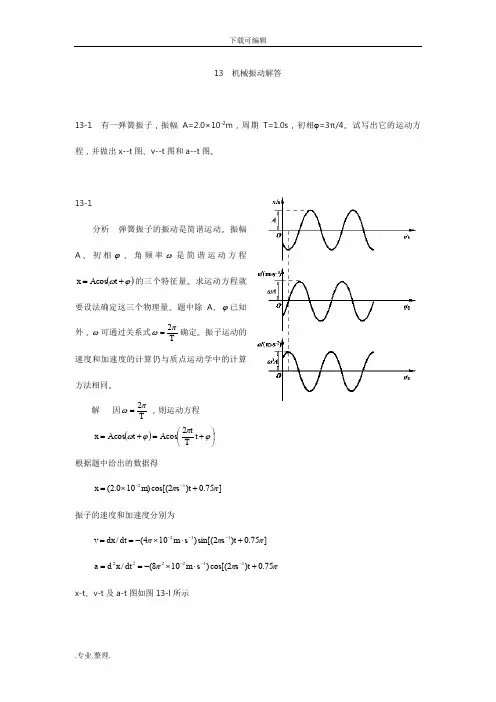
13 机械振动解答13-1 有一弹簧振子,振幅A=2.0×10-2m ,周期T=1.0s ,初相ϕ=3π/4。
试写出它的运动方程,并做出x--t 图、v--t 图和a--t 图。
13-1分析 弹簧振子的振动是简谐运动。
振幅A 、初相ϕ、角频率ω是简谐运动方程()ϕω+=t A x cos 的三个特征量。
求运动方程就要设法确定这三个物理量。
题中除A 、ϕ已知外,ω可通过关系式Tπω2=确定。
振子运动的速度和加速度的计算仍与质点运动学中的计算方法相同。
解 因Tπω2=,则运动方程()⎪⎭⎫⎝⎛+=+=ϕπϕωt T t A t A x 2cos cos根据题中给出的数据得]75.0)2cos[()100.2(12ππ+⨯=--t s m x振子的速度和加速度分别为 ]75.0)2sin[()104(/112πππ+⋅⨯-==---t s s m dt dx vπππ75.0)2cos[()108(/112222+⋅⨯-==---t s s m dt x d ax-t 、v-t 及a-t 图如图13-l 所示13-2 若简谐运动方程为⎥⎦⎤⎢⎣⎡+=-4)20(cos )01.0(1ππt s m x ,求:(1)振幅、频率、角频率、周期和初相;(2)t=2s 时的位移、速度和加速度。
13-2分析 可采用比较法求解。
将已知的简谐运动方程与简谐运动方程的一般形式()ϕω+=t A x cos 作比较,即可求得各特征量。
运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果。
解 (l )将]25.0)20cos[()10.0(1ππ+=-t s m x 与()ϕω+=t A x cos 比较后可得:振幅A= 0.10 m ,角频率120-=s πω,初相πϕ25.0=,则周期 s T 1.0/2==ωπ,频率Hz T 10/1==ν。
(2)t= 2s 时的位移、速度、加速度分别为m m x 21007.7)25.040cos()10.0(-⨯=+=ππ )25.040sin()2(/1πππ+⋅-==-s m dt dx v )25.040cos()40(/2222πππ+⋅-==-s m dt x d a13-3 设地球是一个半径为R 的均匀球体,密度ρ5.5×103kg •m -3。
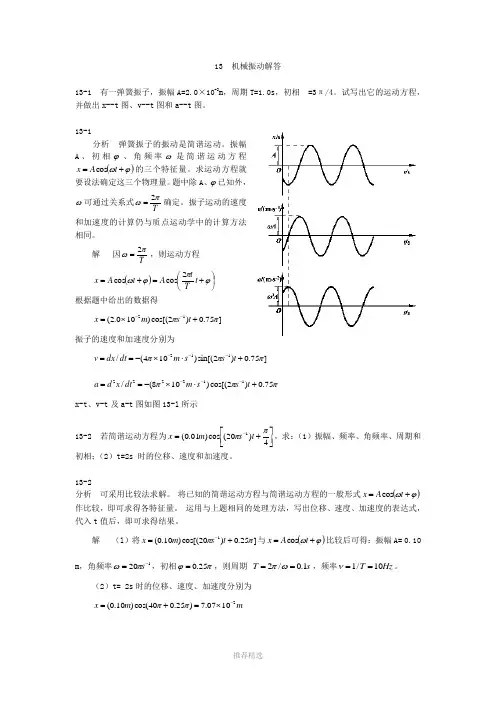
13 机械振动解答13-1 有一弹簧振子,振幅A=2.0×10-2m ,周期T=1.0s ,初相=3π/4。
试写出它的运动方程,并做出x--t 图、v--t 图和a--t 图。
13-1分析 弹簧振子的振动是简谐运动。
振幅A 、初相ϕ、角频率ω是简谐运动方程()ϕω+=t A x cos 的三个特征量。
求运动方程就要设法确定这三个物理量。
题中除A 、ϕ已知外,ω可通过关系式Tπω2=确定。
振子运动的速度和加速度的计算仍与质点运动学中的计算方法相同。
解 因Tπω2=,则运动方程()⎪⎭⎫⎝⎛+=+=ϕπϕωt T t A t A x 2cos cos根据题中给出的数据得]75.0)2cos[()100.2(12ππ+⨯=--t s m x振子的速度和加速度分别为 ]75.0)2sin[()104(/112πππ+⋅⨯-==---t s s m dt dx vπππ75.0)2cos[()108(/112222+⋅⨯-==---t s s m dt x d ax-t 、v-t 及a-t 图如图13-l 所示13-2 若简谐运动方程为⎥⎦⎤⎢⎣⎡+=-4)20(cos )01.0(1ππt s m x ,求:(1)振幅、频率、角频率、周期和初相;(2)t=2s 时的位移、速度和加速度。
13-2分析 可采用比较法求解。
将已知的简谐运动方程与简谐运动方程的一般形式()ϕω+=t A x cos 作比较,即可求得各特征量。
运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果。
解 (l )将]25.0)20cos[()10.0(1ππ+=-t s m x 与()ϕω+=t A x cos 比较后可得:振幅A= 0.10 m ,角频率120-=s πω,初相πϕ25.0=,则周期 s T 1.0/2==ωπ,频率Hz T 10/1==ν。
(2)t= 2s 时的位移、速度、加速度分别为mm x 21007.7)25.040cos()10.0(-⨯=+=ππ)25.040sin()2(/1πππ+⋅-==-s m dt dx v )25.040cos()40(/2222πππ+⋅-==-s m dt x d a13-3 设地球是一个半径为R 的均匀球体,密度ρ5.5×103kg •m -3。
13机械振动解答13-1 有一弹簧振子,振幅A=2.0 X 10-2m,周期T=1.Os ,初相=3 π /4。
试写岀它的运动方程,并做岀x--t图、v--t图和a--t图。
13-1分析弹簧振子的振动是简谐运动。
振幅A、初相「、角频率•■是简谐运动方程X=ACoSlQt亠。
的三个特征量。
求运动方程就要设法确定这三个物理量。
题中除A、「已知外,2 Tr-■ ■可通过关系式•=—确定。
振子运动的速度和加速度的计算仍与质点运动学中的计算方法相同。
解因.=Z ,则运动方程TX=ACOS讥=ACOS i2 t t : !■ I1W尸I T丿根据题中给出的数据得X =(2.0 10 ^m)cos[( 2":S A)t 0.75二]振子的速度和加速度分别为V =dχ∕dt - 10^m s1)sin[(2∏s')t 亠0.75二]a =d2χ∕dt2二2 10 2m S 丄)cos[(2二S 丄)t 0.75二x-t、v-t及a-t图如图13-1所示13-2 若简谐运动方程为X =(0.01m)cos(20:s」)t ',求:(1)振幅、频率、角频率、周期和- 4初相;(2) t=2s时的位移、速度和加速度。
13-2分析可采用比较法求解。
将已知的简谐运动方程与简谐运动方程的一般形式X=ACOS ∙∙t ■作比较,即可求得各特征量。
运用与上题相同的处理方法,写岀位移、速度、加速度的表达式,代入t值后,即可求得结果。
解 (l )将X =(0.10m)cos[(20 7s ^)t • 0.25 二]与X=ACOS lU t w]比较后可得:振幅A= 0.10m 角频率• =20二S1,初相=0.25二,则周期T =2TJ=0∙1s ,频率=1∕T =10Hz。
(2) t= 2s时的位移、速度、加速度分别为X =(0.10m)cos(40 二0.25 二)=7.07 10i mV =dx∕dt - -(2~'m S^)Sin(40,亠0.25二)a =d2x∕dt2 = J40 二2m s?)cos(40 ;亠0.25二)13-3设地球是一个半径为R的均匀球体,密度P 5.5 X 103kg? m3。
第四章 机械振动4-1 一个质点作简谐运动,振幅为A ,在起始时刻质点的位移为2A-,且向x 轴正方向运动,代表此简谐运动的旋转矢量为( )题4-1图分析与解(B )图中旋转矢量的矢端在x 轴上投影点的位移为-A /2,且投影点的运动方向指向Ox 轴正向,即其速度的x 分量大于零,故满足题意.因而正确答案为(B ). 4-2 一简谐运动曲线如图(a )所示,则运动周期是( )(A) 2.62 s (B) 2.40 s (C) 2.20 s (D )2.00 s题4-2图分析与解 由振动曲线可知,初始时刻质点的位移为A /2,且向x 轴正方向运动.图(b)是其相应的旋转矢量图,由旋转矢量法可知初相位为-.振动曲线上给出质点从A /2 处运动到x =0处所需时间为1 s ,由对应旋转矢量图可知相应的相位差65232πππϕ=+=∆,则角频率1s rad 65Δ/Δ-⋅==πϕωt ,周期s 40.22==ωπT .故选(B ). 4-3 两个同周期简谐运动曲线如图(a )所示, x 1的相位比x 2的相位( ) (A )落后2π(B )超前2π(C )落后π(D )超前π 分析与解 由振动曲线图作出相应的旋转矢量图(b )即可得到答案为(B ).3/π2题4 -3图4-4 两个同振动方向、同频率、振幅均为A 的简谐运动合成后,振幅仍为A ,则这两个简谐运动的相位差为( )(A )60(B )90(C )120(D )180分析与解 由旋转矢量图可知两个简谐运动1和2的相位差为120时,合成后的简谐运动3的振幅仍为A .正确答案为(C ).题4-4图4-5 若简谐运动方程为⎪⎭⎫⎝⎛+=4ππ20cos 10.0t x ,式中x 的单位为m ,t 的单位为s.求:(1)振幅、频率、角频率、周期和初相;(2)s 2=t 时的位移、速度和加速度. 分析 可采用比较法求解.将已知的简谐运动方程与简谐运动方程的一般形式()ϕω+=t A x cos 作比较,即可求得各特征量.运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果. 解 (1)将()()m π25.0π20cos 10.0+=t x与()ϕω+=t A x cos 比较后可得:振幅A =0.10m ,角频率1s rad π20-⋅=ω,初相ϕ=0.25π,则周期s 1.0/π2==ωT ,频率Hz /1T =v .(2)s 2=t 时的位移、速度、加速度分别为()m 1007.7π25.0π40cos 10.02-⨯=+=t x ()-1s m 44.4π25.0π40sin π2d /d ⋅-=+-==t x v()-22222s m 1079.2π25.0π40cos π40d /d ⋅⨯-=+-==t x a4-6 一放置在水平桌面上的弹簧振子,振幅A =2.0 ×10-2m ,周期T =0.50s.当t =0 时,(1)物体在正方向端点;(2)物体在平衡位置、向负方向运动;(3)物体在x =-1.0×10-2m 处,向负方向运动;(4)物体在x =-1.0×10-2m 处,向正方向运动.求以上各种情况的运动方程.分析 在振幅A 和周期T 已知的条件下,确定初相φ是求解简谐运动方程的关键.初相的确定通常有两种方法.(1)解析法:由振动方程出发,根据初始条件,即t =0 时,x =x 0和v =v 0来确定φ值.(2)旋转矢量法:如图(a )所示,将质点P 在Ox 轴上振动的初始位置x 0和速度v 0的方向与旋转矢量图相对应来确定φ.旋转矢量法比较直观、方便,在分析中常采用.题4-6图解 由题给条件知A =2.0 ×10-2m ,1s π4/2-==T ω,而初相φ可采用分析中的两种不同方法来求.解析法:根据简谐运动方程()ϕω+=t A x cos ,当0t =时有()ϕω+=t A x cos 0,sin 0ϕωA -=v .当(1)A x =0时,1cos 1=ϕ,则01=ϕ; (2)00=x 时,0cos 2=ϕ,2π2±=ϕ,因00<v ,取2π2=ϕ; (3)m 100120-⨯=.x 时,50cos 3.=ϕ,3π3±=ϕ,由00<v ,取3π3=ϕ; (4)m 100120-⨯-=.x 时,50cos 4.-=ϕ,3ππ4±=ϕ,由00>v ,取3π44=ϕ. 旋转矢量法:分别画出四个不同初始状态的旋转矢量图,如图(b )所示,它们所对应的初相分别为01=ϕ,2π2=ϕ,3π3=ϕ,3π44=ϕ. 振幅A 、角频率ω、初相φ均确定后,则各相应状态下的运动方程为 (1)()m tπcos4100.22-⨯=x(2)()()m /2πt π4cos 100.22+⨯=-x (3)()()m /3πt π4cos 100.22+⨯=-x (4)()()m /3π4t π4cos 100.22+⨯=-x4-7 有一弹簧,当其下端挂一质量为m 的物体时,伸长量为9.8 ×10-2m .若使物体上、下振动,且规定向下为正方向.(1)当t =0 时,物体在平衡位置上方8.0 ×10-2m处,由静止开始向下运动,求运动方程.(2)当t =0时,物体在平衡位置并以0.6m·s -1的速度向上运动,求运动方程.分析 求运动方程,也就是要确定振动的三个特征物理量A 、ω和φ.其中振动的角频率是由弹簧振子系统的固有性质(振子质量m 及弹簧劲度系数k )决定的,即ω=k可根据物体受力平衡时弹簧的伸长来计算;振幅A 和初相φ需要根据初始条件确定.题4-7图解 物体受力平衡时,弹性力F 与重力P 的大小相等,即F =mg .而此时弹簧的伸长量Δl =9.8 ×10-2m .则弹簧的劲度系数k =F /Δl =mg /Δl .系统作简谐运动的角频率为1s 10-=∆==l g m k //ω(1)设系统平衡时,物体所在处为坐标原点,向下为x 轴正向.由初始条件t =0 时,x 10=8.0 ×10-2 m 、v 10=0 可得振幅()m 10082210210-⨯=+=./ωv x A ;应用旋转矢量法可确定初相π1=ϕ[图(a )].则运动方程为()()m π10t cos 100.821+⨯=-x(2)t =0时,x 20=0、v 20=0.6 m·s -1,同理可得()m 100622202202-⨯=+=./ωv x A ;2/π2=ϕ[图(b )].则运动方程为()()m π5.010t cos 100.622+⨯=-x4-8 某振动质点的x -t 曲线如图(a )所示,试求:(1)运动方程;(2)点P 对应的相位;(3)到达点P 相应位置所需的时间.分析 由已知运动方程画振动曲线和由振动曲线求运动方程是振动中常见的两类问题.本题就是要通过x -t 图线确定振动的三个特征量A 、ω和0ϕ,从而写出运动方程.曲线最大幅值即为振幅A ;而ω、0ϕ通常可通过旋转矢量法或解析法解出,一般采用旋转矢量法比较方便.解 (1)质点振动振幅A =0.10 m.而由振动曲线可画出t 0=0 和t 1=4 s时旋转矢量,如图(b )所示.由图可见初相3/π0-=ϕ(或3/π50=ϕ),而由()3201//ππω+=-t t 得1s 24/π5-=ω,则运动方程为()m 3/π24π5cos 10.0⎪⎭⎫⎝⎛-=t x题4-8图(2)图(a )中点P 的位置是质点从A /2 处运动到正向的端点处.对应的旋转矢量图如图(c )所示.当初相取3/π0-=ϕ时,点P的相位为()000=-+=p p t ωϕϕ(如果初相取成3/π50=ϕ,则点P 相应的相位应表示为()π200=-+=p p t ωϕϕ.(3)由旋转矢量图可得()3/π0=-p t ω,则s 61.=p t .4-9 质量为10 g 的物体沿x 的轴作简谐运动,振幅A =10 cm ,周期T =4.0 s ,t =0 时物体的位移为,cm 0.50-=x 且物体朝x 轴负方向运动,求(1)t =1.0 s 时物体的位移;(2)t =1.0 s 时物体受的力;(3)t =0之后何时物体第一次到达x =5.0 cm 处;(4)第二次和第一次经过x =5.0 cm 处的时间间隔.分析根据题给条件可以先写出物体简谐运动方程)cos(ϕω+=t A x .其中振幅A ,角频率Tπ2=ω均已知,而初相ϕ可由题给初始条件利用旋转矢量法方便求出. 有了运动方程,t 时刻位移x 和t 时刻物体受力x m ma F 2ω-==也就可以求出. 对于(3)、(4)两问均可通过作旋转矢量图并根据公式t ∆=∆ωϕ很方便求解.解由题给条件画出t =0时该简谐运动的旋转矢量图如图(a )所示,可知初相3π2=ϕ.而A =0.10 m ,1s 2ππ2-==T ω.则简谐运动方程为m )3π22πcos(10.0+=t x(1)t =1.0 s 时物体的位移m 1066.8m )3π22π0.1cos(10.02-⨯-=+⨯=x(2)t =1.0 s 时物体受力N1014.2N)1066.8()2π(101032232---⨯=⨯-⨯⨯⨯-=-=x m F ω (3)设t =0时刻后,物体第一次到达x =5.0 cm 处的时刻为t 1,画出t =0和t =t 1时刻的旋转矢量图,如图(b )所示,由图可知,A 1与A 的相位差为π,由t ∆=∆ωϕ得s 2s 2/ππ1==∆=ωϕt (4)设t =0时刻后,物体第二次到达x =5.0 cm 处的时刻为t 2,画出t =t 1和t = t 2时刻的旋转矢量图,如图(c )所示,由图可知,A 2与A 1的相位差为3π2,故有 s 34s 2/π3/π212==∆=-=∆ωϕt t t题 4-9 图4-10 图(a )为一简谐运动质点的速度与时间的关系曲线,且振幅为2cm ,求(1)振动周期;(2)加速度的最大值;(3)运动方程.分析 根据v -t 图可知速度的最大值v max ,由v max =Aω可求出角频率ω,进而可求出周期T 和加速度的最大值a max =Aω2.在要求的简谐运动方程x =A cos (ωt +φ)中,因为A 和ω已得出,故只要求初相位φ即可.由v -t 曲线图可以知道,当t =0 时,质点运动速度v 0=v max /2 =Aω/2,之后速度越来越大,因此可以判断出质点沿x 轴正向向着平衡点运动.利用v 0=-Aωsinφ就可求出φ. 解 (1)由ωA v =max 得1s 51-=.ω,则s 2.4/π2==ωT(2)222max s m 1054--⋅⨯==.ωA a(3)从分析中已知2/sin0ωA ωA =-=v ,即21sin /-=ϕ6/π5,6/π--=ϕ因为质点沿x 轴正向向平衡位置运动,则取6/π5-=,其旋转矢量图如图(b )所示.则运动方程为()cm 6π55.1cos 2⎪⎭⎫⎝⎛-=t x题4-10图4-11 有一单摆,长为1.0m ,最大摆角为5°,如图所示.(1)求摆的角频率和周期;(2)设开始时摆角最大,试写出此单摆的运动方程;(3)摆角为3°时的角速度和摆球的线速度各为多少?题4-11图分析 单摆在摆角较小时(θ<5°)的摆动,其角量θ与时间的关系可表示为简谐运动方程()ϕωθθ+=t cos max ,其中角频率ω仍由该系统的性质(重力加速度g 和绳长l )决定,即l g /=ω.初相φ与摆角θ,质点的角速度与旋转矢量的角速度(角频率)均是不同的物理概念,必须注意区分. 解 (1)单摆角频率及周期分别为s 01.2/π2;s 13.3/1====-ωT l g ω(2)由0=t 时omax 5==θθ可得振动初相0=ϕ,则以角量表示的简谐运动方程为t θ13.3cos 36π=(3)摆角为3°时,有()60cos max ./==+θθϕωt ,则这时质点的角速度为()()1max 2max max s2180800cos 1sin /d d --=-=+--=+-=..ωθϕωωθϕωωθθt t t线速度的大小为1s m 218.0/d d -⋅-==t l v θ讨论 质点的线速度和角速度也可通过机械能守恒定律求解,但结果会有极微小的差别.这是因为在导出简谐运动方程时曾取θθ≈sin ,所以,单摆的简谐运动方程仅在θ较小时成立.4-12 如图(a )所示,质量为1.0 ×10-2kg 的子弹,以500m·s -1的速度射入木块,并嵌在木块中,同时使弹簧压缩从而作简谐运动,设木块的质量为4.99 kg ,弹簧的劲度系数为8.0×103 N·m -1,若以弹簧原长时物体所在处为坐标原点,向左为x 轴正向,求简谐运动方程.题4-12图分析 可分为两个过程讨论.首先是子弹射入木块的过程,在此过程中,子弹和木块组成的系统满足动量守恒,因而可以确定它们共同运动的初速度v 0,即振动的初速度.随后的过程是以子弹和木块为弹簧振子作简谐运动.它的角频率由振子质量m 1+m 2和弹簧的劲度系数k 确定,振幅和初相可根据初始条件(初速度v 0和初位移x 0)求得.初相位仍可用旋转矢量法求.解 振动系统的角频率为()121s 40-=+=m m k /ω由动量守恒定律得振动的初始速度即子弹和木块的共同运动初速度v 0为12110s m 0.1-⋅=+=m m vm v又因初始位移x 0=0,则振动系统的振幅为()m 105.2//202020-⨯==+=ωωx A v v图(b )给出了弹簧振子的旋转矢量图,从图中可知初相位2/π0=ϕ,则简谐运动方程为()()m π0.540cos 105.22+⨯=-t x4-13 如图(a )所示,一劲度系数为k 的轻弹簧,其下挂有一质量为m 1的空盘.现有一质量为m 2的物体从盘上方高为h 处自由落入盘中,并和盘粘在一起振动.问:(1)此时的振动周期与空盘作振动的周期有何不同?(2)此时的振幅为多大?题4-13图分析 原有空盘振动系统由于下落物体的加入,振子质量由m 1变为m 1 + m 2,因此新系统的角频率(或周期)要改变.由于()2020/ωx A v +=,因此,确定初始速度v 0和初始位移x 0是求解振幅A 的关键.物体落到盘中,与盘作完全非弹性碰撞,由动量守恒定律可确定盘与物体的共同初速度v 0,这也是该振动系统的初始速度.在确定初始时刻的位移x 0时,应注意新振动系统的平衡位置应是盘和物体悬挂在弹簧上的平衡位置.因此,本题中初始位移x 0,也就是空盘时的平衡位置相对新系统的平衡位置的位移.解 (1)空盘时和物体落入盘中后的振动周期分别为k m ωT /π2/π21== ()k m m ωT /π2/π221+='='可见T ′>T ,即振动周期变大了.(2)如图(b )所示,取新系统的平衡位置为坐标原点O .则根据分析中所述,初始位移为空盘时的平衡位置相对粘上物体后新系统平衡位置的位移,即g kmg k m m k g m l l x 2211210-=+-=-= 式中k g m l 11=为空盘静止时弹簧的伸长量,l 2=g km m 21+为物体粘在盘上后,静止时弹簧的伸长量.由动量守恒定律可得振动系统的初始速度,即盘与物体相碰后的速度gh m m m m m m 22122120+=+=v v式中gh 2=v 是物体由h 高下落至盘时的速度.故系统振动的振幅为()gm m khk g m x A )(21/2122020++='+=ωv 本题也可用机械能守恒定律求振幅A .4-14 质量为0.10kg 的物体,以振幅1.0×10-2m 作简谐运动,其最大加速度为4.0 m·s -1求:(1)振动的周期;(2)物体通过平衡位置时的总能量与动能;(3)物体在何处其动能和势能相等?(4)当物体的位移大小为振幅的一半时,动能、势能各占总能量的多少?分析 在简谐运动过程中,物体的最大加速度2max ωA a =,由此可确定振动的周期T .另外,在简谐运动过程中机械能是守恒的,其中动能和势能互相交替转化,其总能量E =kA 2/2.当动能与势能相等时,E k =E P =kA 2/4.因而可求解本题.解 (1)由分析可得振动周期s 314.0/π2/π2max ===a A ωT(2)当物体处于平衡位置时,系统的势能为零,由机械能守恒可得系统的动能等于总能量,即J 100221213max22k -⨯====.mAa mA E E ω (3)设振子在位移x 0处动能与势能相等,则有42220//kA kx =得m 100772230-⨯±=±=./A x(4)物体位移的大小为振幅的一半(即2x A =/)时的势能为4221212P /E A k kx E =⎪⎭⎫⎝⎛==则动能为43P K /E E E E =-=4-15 已知两同方向、同频率的简谐运动的运动方程分别为()()m π75.010cos 05.01+=t x ;()()m π25.010cos 06.02+=t x .求:(1)合振动的振幅及初相;(2)若有另一同方向、同频率的简谐运动()()m 10cos 07033ϕ+=t x .,则3ϕ为多少时,x 1+x 3的振幅最大?又3ϕ为多少时,x 2+x 3的振幅最小?题4-15图分析 可采用解析法或旋转矢量法求解.由旋转矢量合成可知,两个同方向、同频率简谐运动的合成仍为一简谐运动,其角频率不变;合振动的振幅()12212221cos 2ϕϕ-++=A A A A A ,其大小与两个分振动的初相差12ϕϕ-相关.而合振动的初相位()()[]22112211cos cos sin sin arctan ϕϕϕϕϕA A A A++=/解 (1)作两个简谐运动合成的旋转矢量图(如图).因为2/πΔ12-=-=ϕϕϕ,故合振动振幅为()m 1087cos 2212212221-⨯=-++=.ϕϕA A A A A合振动初相位()()[]rad1.48arctan11cos cos sin sin arctan 22112211==++=ϕϕϕϕϕA A A A /(2)要使x 1+x 3振幅最大,即两振动同相,则由π2Δk =ϕ得,...2,1,0,π75.0π2π213±±=+=+=k k k ϕϕ要使x 1+x 3的振幅最小,即两振动反相,则由()π12Δ+=k ϕ得(),...2,1,0,π25.1π2π1223±±=+=++=k k k ϕϕ4-16 两个同频率的简谐运动1 和2 的振动曲线如图(a )所示,求(1)两简谐运动的运动方程x 1和x 2;(2)在同一图中画出两简谐运动的旋转矢量,并比较两振动的相位关系;(3)若两简谐运动叠加,求合振动的运动方程.分析 振动图已给出了两个简谐运动的振幅和周期,因此只要利用图中所给初始条件,由旋转矢量法或解析法求出初相位,便可得两个简谐运动的方程.解 (1)由振动曲线可知,A =0.1 m,T =2s,则ω=2π/T =πs-1.曲线1表示质点初始时刻在x =0 处且向x 轴正向运动,因此φ1=-π/2;曲线2 表示质点初始时刻在x =A /2 处且向x 轴负向运动,因此φ2=π/3.它们的旋转矢量图如图(b )所示.则两振动的运动方程分别为()()m 2/ππcos 1.01-=t x 和(2)由图(b )可知振动2超前振动1 的相位为5π/6. (3)()ϕω+'=+=t A x x x cos 21其中()m 0520cos 212212221.=-++='ϕϕA A A A A()12π0.268arctan cos cos sin sin arctan22112211-=-=++=ϕϕϕϕϕA A A A则合振动的运动方程为 ()()m π/12πcos 052.0-=t x()()m 3/ππcos 1.02+=t x题4-16 图4-17 图(a )表示t =0 时的简谐波的波形图,波沿x 轴正方向传播,图(b )为一质点的振动曲线.则图(a )中所表示的x =0 处振动的初相位与图(b )所表示的振动的初相位分别为( )题4-17 图(A)均为零 (B)均为2π(C)均为2π-(D)2π与2π-(E)2π-与2π分析与解 本题给了两个很相似的曲线图,但本质却完全不同.求解本题要弄清振动图和波形图不同的物理意义.图(a )描述的是连续介质中沿波线上许许多多质点振动在t 时刻的位移状态.其中原点处质点位移为零,其运动方向由图中波形状态和波的传播方向可以知道是沿y 轴负向,利用旋转矢量法可以方便的求出该质点振动的初相位为π/2.而图(b )是一个质点的振动曲线图,该质点在t =0 时位移为0,t >0 时,由曲线形状可知,质点向y 轴正向运动,故由旋转矢量法可判知初相位为-π/2,答案为(D ).4-18一横波以速度u 沿x 轴负方向传播,t 时刻波形曲线如图(a )所示,则该时刻() (A )A 点相位为π(B )B 点静止不动 (C )C 点相位为2π3(D )D 点向上运动 分析与解由波形曲线可知,波沿x 轴负向传播,B 、D 处质点均向y 轴负方向运动,且B 处质点在运动速度最快的位置. 因此答案(B )和(D )不对. A 处质点位于正最大位移处,C 处质点位于平衡位置且向y 轴正方向运动,它们的旋转矢量图如图(b )所示.A 、C 点的相位分别为0和2π3.故答案为(C )题 4-18 图4-19 如图所示,两列波长为λ的相干波在点P 相遇.波在点S 1振动的初相是φ1,点S 1到点P 的距离是r 1.波在点S 2的初相是φ2,点S 2到点P 的距离是r 2,以k 代表零或正、负整数,则点P 是干涉极大的条件为( )()()()()()()π2/π2A π2/π2A π2A πA 211212121212k r r k r r k k r r =-+-=-+-=-=-λϕϕλϕϕϕϕ分析与解 P 是干涉极大的条件为两分振动的相位差π2Δk =,而两列波传到P 点时的两分振动相位差为()λϕϕϕ/π2Δ1212r r ---=,故选项(D )正确.题4-19图4-20 一横波在沿绳子传播时的波动方程为()x y ππ5.2cos 20.0-=,式中y 的单位为m ,t 的单位为s .(1)求波的振幅、波速、频率及波长;(2)求绳上质点振动时的最大速度;(3)分别画出t =1s 和t =2 s 时的波形,并指出波峰和波谷.画出x =1.0 m处质点的振动曲线并讨论其与波形图的不同.分析 (1)已知波动方程(又称波函数)求波动的特征量(波速u 、频率υ、振幅A 及波长λ等),通常采用比较法.将已知的波动方程按波动方程的一般形式⎥⎦⎤⎢⎣⎡+⎪⎭⎫ ⎝⎛=0cos ϕωu x t A y 书写,然后通过比较确定各特征量(式中u x前“-”、“+”的选取分别对应波沿x 轴正向和负向传播).比较法思路清晰、求解简便,是一种常用的解题方法.(2)讨论波动问题,要理解振动物理量与波动物理量之间的内在联系与区别.例如区分质点的振动速度与波速的不同,振动速度是质点的运动速度,即v =d y /d t ;而波速是波线上质点运动状态的传播速度(也称相位的传播速度、波形的传播速度或能量的传播速度),其大小由介质的性质决定.介质不变,波速保持恒定.(3)将不同时刻的t 值代入已知波动方程,便可以得到不同时刻的波形方程y =y (x ),从而作出波形图.而将确定的x 值代入波动方程,便可以得到该位置处质点的运动方程y =y (t ),从而作出振动图. 解 (1)将已知波动方程表示为()[]()m 5.2/π5.2cos 20.0x t y -=与一般表达式()[]0cos ϕω+-=u x t A y /比较,可得0s m 52m 20001=⋅==-ϕ,.,.u A则m 0.2/,Hz 25.1π2/====v u λωv(2)绳上质点的振动速度()[]()1s m 5.2/π5.2sin π5.0d /d -⋅--==x t t y v则1max s m 57.1-⋅=v(3)t =1s和t =2s时的波形方程分别为()()()()m ππ5cos 20.0m ππ5.2cos 20.021x y x y -=-=波形图如图(a )所示. x =1.0m 处质点的运动方程为()()m π5.2cos 20.0t y -=振动图线如图(b )所示.波形图与振动图虽在图形上相似,但却有着本质的区别.前者表示某确定时刻波线上所有质点的位移情况,而后者则表示某确定位置的一个质点,其位移随时间变化的情况.题4-20图4-21 波源作简谐运动,其运动方程为()m tπcos240100.43-⨯=y ,它所形成的波形以30m·s-1的速度沿一直线传播.(1)求波的周期及波长;(2)写出波动方程.分析 已知波源运动方程求波动物理量及波动方程,可先将运动方程与其一般形式进行比较,求出振幅A 、角频率ω及初相φ0,而这三个物理量与波动方程的一般形式()[]0cos ϕω+-=u x t A y /中相应的三个物理量是相同的.再利用题中已知的波速u 及公式ω=2πν=2π/T 和λ=uT 即可求解.解 (1)由已知的运动方程可知,质点振动的角频率1s π240-=ω.根据分析中所述,波的周期就是振动的周期,故有s 1033.8/π23-⨯==ωT波长为 λ=uT =0.25 m(2)将已知的波源运动方程与简谐运动方程的一般形式比较后可得A =4.0 ×10-3m ,1s π240-=ω,φ0=0故以波源为原点,沿x 轴正向传播的波的波动方程为()[]()()m π8π240cos 100.4/cos 30x t u x t ωA y -⨯=+-=-4-22 图示为平面简谐波在t =0 时的波形图,设此简谐波的频率为250Hz ,且此时图中质点P 的运动方向向上.求:(1)该波的波动方程;(2)在距原点O 为7.5 m 处质点的运动方程与t =0 时该点的振动速度.分析 (1)从波形曲线图获取波的特征量,从而写出波动方程是建立波动方程的又一途径.具体步骤为:1. 从波形图得出波长λ、振幅A 和波速u =λυ;2. 根据点P 的运动趋势来判断波的传播方向,从而可确定原点处质点的运动趋向,并利用旋转矢量法确定其初相φ0.(2)在波动方程确定后,即可得到波线上距原点O 为x 处的运动方程y =y (t ),及该质点的振动速度υ=d y /d t .解 (1)从图中得知,波的振幅A =0.10 m ,波长λ=20.0m ,则波速u =λυ=5.0 ×103m·s-1.根据t =0 时点P 向上运动,可知波沿Ox 轴负向传播,并判定此时位于原点处的质点将沿Oy 轴负方向运动.利用旋转矢量法可得其初相φ0=π/3.故波动方程为()[]()[]()m 3/π5000/π500cos 10.0/cos 0++=++=x t u x t A y ϕω(2)距原点O 为x =7.5m处质点的运动方程为()()m 12π13π5000.10cos y /t +=t =0 时该点的振动速度为()-10s m 40.6/12π13sin π50/d d ⋅=-===t t y v()ϕω+=t cos A y题4-22图4-23 平面简谐波的波动方程为()x t yπ2π4cos 08.0-=,式中y 和x 的单位为m ,t 的单位为s,求:(1) t =2.1 s 时波源及距波源0.10m 两处的相位;(2)离波源0.80 m 及0.30 m 两处的相位差.解 (1)将t =2.1 s 和x =0 代入题给波动方程,可得波源处的相位π4.81=ϕ将t =2.1 s 和x ′=0.10 m 代入题给波动方程,得0.10 m 处的相位为π2.82=ϕ(2)从波动方程可知波长λ=1.0 m .这样,x 1=0.80 m 与x 2=0.30 m 两点间的相位差πΔπ2Δ=⋅=λϕx4-24 两相干波波源位于同一介质中的A 、B 两点,如图(a )所示.其振幅相等、频率皆为100 Hz ,B 比A 的相位超前π.若A 、B 相距30.0m ,波速为u =400 m·s -1,试求AB 连线上因干涉而静止的各点的位置.题4-24图分析 两列相干波相遇时的相位差λϕϕϕrΔπ2Δ12--=.因此,两列振幅相同的相干波因干涉而静止的点的位置,可根据相消条件()π12Δ+=k ϕ获得.解 以A 、B 两点的中点O 为原点,取坐标如图(b )所示.两波的波长均为λ=u /υ=4.0 m .在A 、B 连线上可分三个部分进行讨论. 1. 位于点A 左侧部分()π14π2ΔA B A B -=---=r r ϕϕϕ因该范围内两列波相位差恒为2π的整数倍,故干涉后质点振动处处加强,没有静止的点. 2. 位于点B 右侧部分()π16π2ΔA B A B =---=r r ϕϕϕ显然该范围内质点振动也都是加强,无干涉静止的点.3. 在A 、B 两点的连线间,设任意一点P 距原点为x .因x r -=15B ,x r +=15A ,则两列波在点P 的相位差为()()π1/π2ΔA B A B +=---=x r r λϕϕϕ根据分析中所述,干涉静止的点应满足方程()()π152π1+=+k x x得()2,...1,0,k m2±±==k x因x ≤15 m ,故k ≤7.即在A 、B 之间的连线上共有15 个静止点.4-25图(a )是干涉型消声器结构的原理图,利用这一结构可以消除噪声.当发动机排气噪声声波经管道到达点A 时,分成两路而在点B 相遇,声波因干涉而相消.如果要消除频率为300 Hz 的发动机排气噪声,则图中弯管与直管的长度差Δr =r 2-r 1至少应为多少?(设声波速度为340 m·s -1)题4-25图分析 一列声波被分成两束后再相遇,将形成波的干涉现象.由干涉相消条件,可确定所需的波程差,即两管的长度差Δr .解 由分析可知,声波从点A 分开到点B 相遇,两列波的波程差Δr =r 2 - r 1,故它们的相位差为()λλϕ/Δπ2/π2Δ12r r r =-=由相消静止条件Δφ=(2k +1)π,(k =0,±1,±2,…) 得 Δr =(2k +1)λ/2 根据题中要求令k =0 得Δr 至少应为m 57022.//===∆v u r λ讨论 在实际应用中,由于噪声是由多种频率的声波混合而成,因而常将具有不同Δr 的消声单元串接起来以增加消除噪声的能力.图(b )为安装在摩托车排气系统中的干涉消声器的结构原理图.4-26 一警车以25 m·s -1的速度在静止的空气中行驶,假设车上警笛的频率为v =800 Hz .求:(1)静止站在路边的人听到警车驶近和离去时的警笛声波频率;(2)如果警车追赶一辆速度为15m·s -1的客车,则客车上人听到的警笛声波的频率是多少?(设空气中的声速u =330m·s -1)分析 由于声源与观察者之间的相对运动而产生声多普勒效应,由多普勒频率公式可解得结果.在处理这类问题时,不仅要分清观察者相对介质(空气)是静止还是运动,同时也要分清声源的运动状态.解 (1)根据多普勒频率公式,当声源(警车)以速度υs =25 m·s -1运动时,静止于路边的观察者所接收到的频率为su uvv υ ='警车驶近观察者时,式中υs 前取“-”号,故有Hz 6.8651=-='su uv v υ警车驶离观察者时,式中υs 前取“+”号,故有Hz 7.7432=+='su uv v υ(2)客车的速度为0υ=15m·s -1,声源(警车)与客车上的观察者作同向运动时,观察者收到的频率为Hz 2.82603=--='su u v v υυ4-27 蝙蝠在洞穴中飞来飞去,能非常有效地用超声波脉冲导航.假如蝙蝠发出的超声波频率为39 kHz ,当它以声速的401的速度朝着表面平直的岩壁飞去时,试求它听到的从岩壁反射回来的超声波频率为多少?分析由题意可知,蝙蝠既是波的发出者,又是波的接收者.设超声波的传播速度为u .首先,蝙蝠是声源,发出信号频率为v ,运动速度为40su=υ,岩壁是接收者,利用多普勒频率公式,即可求得岩壁接收到的信号频率v '.经岩壁反射后频率不变,即岩壁发射信号频率为v ',这时蝙蝠是波的接收者,其运动速度为400u=υ,再次利用多普勒频率公式,可求得蝙蝠接收到的信号频率v ''.解将蝙蝠看成波源,则由分析可知,岩壁接收到的信号频率为sυ-='u uvv ,在蝙蝠接收岩壁反射信号时,又将它看成接收者.则蝙蝠接收到的信号频率为kHz41kHz 3940/1140/11/1/1s 0s 00=⨯-+=-+=-+='+=''v u uv u u v u u v υυυυυ。