机器人管理员命令大全
- 格式:docx
- 大小:16.17 KB
- 文档页数:11
机器人控制指令介绍(一)本文旨在通过指令介绍及程序示例帮助读者了解和学习I/O指令、IF\SELECT指令、WAIT指令、JMP/LBL指令、CALL指令以及FOR\ENDFOR指令的使用方法及注意事项。
1.I/O指令I/O指令是改变向外围设备输出信号状态,或读出输入信号状态的指令。
例如:注意:I/O在使用前需要进行配置。
如何加入I/O(信号)指令?1)编辑界面中,按F1【指令】(INST)键,显示图1画面:2)选择I/O,按【ENTER】键确认,显示图2画面:3)选择所需I/O指令,按【ENTER】键确认;4)根据光标位置输入值或选择相应的项并输入值。
2.条件比较和条件选择指令 IF/SELECT2.1条件比较指令 IFIF 条件满足,JMP LBL[i] / Call子程序图3:IF指令支持的条件和计算注意:IF指令可使用逻辑算符(AND、OR)连接条件,单条IF 指令最多可连接5个条件,且“AND”和“OR”不能混合使用。
2.2条件选择指令 SELECT如何加入IF/SELECT指令1)编辑界面中,按F1【指令】(INST)键,显示图4画面:2)选择【IF/SELECT】,按【ENTER】键确认,显示如图5:3)选择所需项,按【ENTER】键确认;4)根据光标位置输入值或选择相应的项并输入值。
3.待命指令 WAIT可以在所指定的时间,或条件得到满足之前使程序执行待命。
图5:WAIT指令支持的条件和计算注意:1.可通过逻辑运算符“or”(或)和“and”(与)将多个条件组合起来,但“or”和“and”不能在同一语句中使用。
2.若程序中的条件不满足,则会一直处于等待状态。
若要解除等待状态,处理措施如下:如需人工干预,可通过【FCTN】键,显示图6画面,选择7 【解除等待】(RELEASE WAIT)跳过等待语句,并在下个语句处等待。
图6:FCTN功能界面使用等待超时跳转指令$WAITTMOUT=n (单位:10msec)WAIT ……,TIMEOUT LBL[i] 等待超时,跳转至LBL[i]4.跳转/标签指令 JMP/LBL跳跃指令:转移到所指定的标签标签指令:指定程序转移目的地的指令。

川崎常用指令表川崎常用指令表1.运动指令1.1 直线运动指令1.1.1 LIN 命令说明:该指令用于让执行直线运动,并可指定目标点、速度和加速度等参数。
语法:LIN X,Y,Z,A,B,C,V,ACC示例:LIN 1000,500,300,0,0,0,100,1000参数说明:- X, Y, Z:目标点在 X、Y、Z 轴上的坐标值;- A, B, C:目标点的姿态(欧拉角);- V:运动速度;- ACC:加速度。
1.1.2 PTPL 命令说明:该指令用于让执行直线运动,并可指定目标点、速度和加速度等参数,但姿态保持不变。
语法:PTPL X,Y,Z,V,ACC示例:PTPL 1000,500,300,100,1000参数说明:- X, Y, Z:目标点在 X、Y、Z 轴上的坐标值;- V:运动速度;- ACC:加速度。
1.2 旋转运动指令1.2.1 CIR 命令说明:该指令用于让按照圆弧路径执行旋转运动,并可指定圆心坐标、目标点坐标、速度和加速度等参数。
语法:CIR Xc,Yc,Zc,Xe,Ye,Ze,V,ACC示例:CIR 1000,500,300,2000,1000,500,100,1000参数说明:- Xc, Yc, Zc:圆心坐标;- Xe, Ye, Ze:目标点坐标;- V:运动速度;- ACC:加速度。
1.2.2 PTPR 命令说明:该指令用于让按照旋转角度执行旋转运动,并可指定旋转轴、旋转角度、速度和加速度等参数。
语法:PTPR A,VR,ACC示例:PTPR 90,100,1000参数说明:- A:旋转角度;- VR:旋转速度;- ACC:加速度。
2.控制指令2.1 停止指令2.1.1 STOP 命令说明:该指令用于让停止当前运动。
语法:STOP示例:STOP2.1.2 HALT 命令说明:该指令用于紧急停止,立即停止当前运动,并关闭系统。
语法:HALT示例:HALT2.2 IO 控制指令2.2.1 DO 命令说明:该指令用于控制数字输出口,可设置开关状态为开或关。
机器人编程为使机器人完成某种任务而设置的动作挨次描述。
机器人运动和作业的指令都是由程序进行掌握,常见的编制方法有两种,示教编程方法和离线编程方法。
其中示教编程方法包括示教、编辑和轨迹再现,可以通过示教盒示教和导引式示教两种途径实现。
由于示教方式有用性强,操作简便,因此大部分机器人都采纳这种方式。
离线编程方法是采用计算机图形学成果,借助图形处理工具建立几何模型,通过一些规划算法来猎取作业规划轨迹。
与示教编程不同,离线编程不与机器人发生关系,在编程过程中机器人可以照常工作。
工业上离线工具只作为一种帮助手段,未得到广泛的应用。
1 .基本命令用EDlT指令进入编辑状态后,可以用C、D、E、I、L、P、R、S、T等命令来进一步编辑。
如:C命令:转变编辑的程序,用一个新的程序代替。
D命令:删除从当前行算起的n行程序,n缺省时为删除当前行。
E命令:退出编辑返回监控模式。
I命令:将当前指令下移一行,以便插入一条指令。
P命令:显示从当前行往下n行的程序文本内容。
T命令:初始化关节插值程序示教模式,在该模式下,按一次示教盒上的“RECODE”按钮就将Mc)VE指令插到程序中。
列表指令DIRECTORY指令:此指令的功能是显示存储器中的全部用户程序名。
1.ISTL指令:功能是显示任意个位置变量值,1.ISTP指令:功能是显示任意个用户的全部程序。
存储指令FoRMAT指令:执行磁盘格式化。
STOREP指令:功能是在指定的磁盘文件内存储指定的程序。
STe)REL指令:此指令存储用户程序中注明的全部位置变量名和变量值。
1.ISTF指令:指令的功能是显示软盘中当前输入的文件名目。
1.oADP指令:功能是将文件中的程序送入内存。
1.OADL指令:功能是将文件中指定的位置变量送入系统内存。
DELETE指令:此指令撤销磁盘中指定的文件。
Cc)MPRESS指令:只用来压缩磁盘空间。
ERASE指令:擦除磁内容并初始化。
掌握程序执行指令ABC)RT指令:执行此指令后紧急停止(紧停)。
富士康工厂机器人基本配置命令本文档将介绍富士康工厂机器人的基本配置命令,帮助用户快速配置机器人并实现简单的动作。
连接机器人首先,您需要通过网线将机器人连接到电脑。
连接后,打开终端或命令行界面,输入以下命令:ssh admin@[IP地址]其中,[IP地址]为您机器人的IP地址。
如果您不知道IP地址,可以通过机器人控制器上的显示屏查看。
配置机器人连接成功后,您可以通过以下命令配置机器人:- 设置机器人名称:setrobotname [机器人名称]- 设置机器人速度:setrobotvel [速度]其中,[速度]为机器人的移动速度,单位为米/秒。
- 设置编码器计数值:setencoder [计数值]- 设置机器人位置:setrobotpose [x] [y] [z] [a] [b] [c]其中,[x]、[y]、[z]为机器人的位置坐标,单位为米;[a]、[b]、[c]为机器人的姿态角度,单位为弧度。
控制机器人动作配置完成后,您可以通过以下命令控制机器人的动作:- 移动机器人:movej [x] [y] [z] [a] [b] [c]其中,[x]、[y]、[z]为机器人的目标位置坐标,单位为米;[a]、[b]、[c]为机器人的目标姿态角度,单位为弧度。
- 抓取物品:gripper close- 放下物品:gripper open以上即为富士康工厂机器人的基本配置命令。
希望能够帮助您快速上手控制机器人,实现简单的动作。
如果您需要更多高级的功能,可以参考机器人控制器上的官方文档。
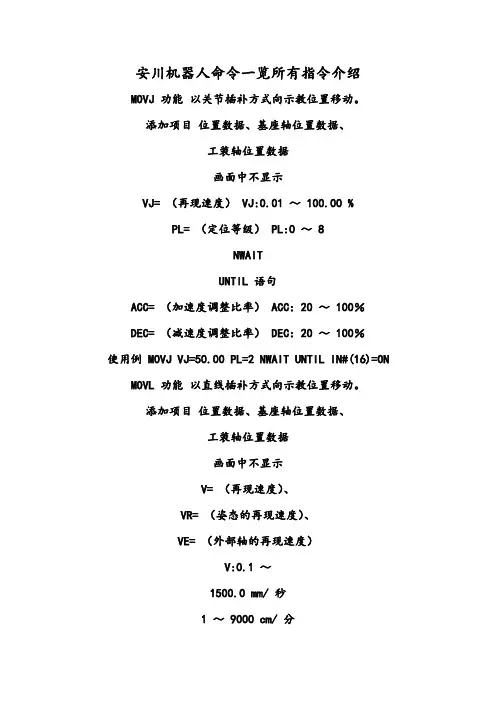
安川机器人命令一览所有指令介绍MOVJ功能以关节插补方式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面中不显示VJ=(再现速度)VJ:0.01~100.00%PL=(定位等级)PL:0~8NWAITUNTIL语句ACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVJ VJ=50.00PL=2NWAIT UNTIL IN#(16)=ON MOVL功能以直线插补方式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面中不显示V=(再现速度)、VR=(姿态的再现速度)、VE=(外部轴的再现速度)V:0.1~1500.0mm/秒1~9000cm/分R:0.1~180.0°/秒VE:0.01~100.00%PL=(定位等级)PL:0~8CR=(转角半径)CR:1.0~6553.5mmNWAITUNTIL语句ACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVL V=138PL=0NWAIT UNTIL IN#(16)=ON MOVC功能用圆弧插补形式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面不显示V=(再现速度)、VR=(姿态的再现速度)、VE=(外部轴的再现速度)与MOVL相同。
PL=(定位等级)PL:0~8NWAITACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVC V=138PL=0NWAIT10基本命令一览DX10010.1移动命令10-2MOVS功能以自由曲线插补形式向示教位置移动添加项目位置数据、基座轴位置数据、工装轴位置数据画面不显示V=(再现速度)、VR=〈姿势的再现速度〉、VE=〈外部轴的再现速度〉与MOVL相同。
PL=(定位等级)PL:0~8NWAITACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVS V=120PL=0IMOV功能以直线插补方式从当前位置按照设定的增量值距离移动。
简述robotstudio中常用指令RobotStudio是ABB公司开发的一个机器人仿真软件,它可以用于机器人的离线编程、仿真和调试。
在RobotStudio中,有许多常用指令可以帮助用户快速地完成机器人程序的编写和调试。
本文将对RobotStudio中常用指令进行详细介绍。
一、基本指令1. MOVE:MOVE指令用于控制机器人从一个位置移动到另一个位置。
MOVE指令可以控制机器人沿直线或弧线运动,并且可以设置加速度和减速度等参数。
2. WAIT:WAIT指令用于控制机器人在某个位置等待一段时间,等待时间可以通过设置参数来控制。
3. JUMP:JUMP指令用于跳转到程序中的其他位置执行,类似于程序中的goto语句。
4. CALL:CALL指令用于调用子程序执行,子程序可以是本地的也可以是外部文件中的程序。
5. RETURN:RETURN指令用于从子程序返回主程序执行。
二、条件语句1. IF:IF语句用于判断某个条件是否成立,如果成立则执行某个操作,否则执行其他操作。
IF语句还可以嵌套使用。
2. ELSE:ELSE语句与IF语句配合使用,当IF条件不成立时执行ELSE 后面的操作。
3. SWITCH/CASE:SWITCH/CASE语句用于根据不同的条件执行不同的操作。
三、循环语句1. FOR:FOR循环用于执行一定次数的重复操作,可以设置循环变量和循环次数。
2. WHILE:WHILE循环用于在满足某个条件时重复执行某个操作,当条件不成立时退出循环。
3. DO/WHILE:DO/WHILE循环与WHILE循环类似,但是它会先执行一次操作再判断条件是否成立。
四、数组和变量1. 数组:数组是一种特殊的变量类型,可以存储多个相同类型的数据。
在RobotStudio中,可以使用数组来存储机器人的位置信息等数据。
2. 变量:变量是程序中用于存储数据的容器,可以存储数字、字符串等数据类型。
在RobotStudio中,可以使用变量来控制机器人运动和完成各种任务。
ABB机器人标准指令详解一、 RAPID程序控制指令1、1程序开始/结束控制指令1) PROGRAM START/END1、指令格式: PROGRAM <程序名> <属性> ;2、描述:此指令标识一个机器人程序的开始或结束。
在这里,<程序名>是你给程序取的名字,<属性>是可选的,表示程序的属性(如:INTERLOCK, NO_INTERLOCK, NOPROGRAM等)。
2) JOB START/END1、指令格式: JOB <作业名> <属性> ;2、描述:此指令标识一个作业的开始或结束。
在这里,<作业名>是你给作业取的名字,<属性>是可选的,表示作业的属性(如:INTERLOCK, NO_INTERLOCK, NOPROGRAM等)。
1、2程序转移指令1) GOTO1、指令格式: GOTO <行号>;2、描述:此指令将程序执行转移到指定的行号。
2) GOSUB1、指令格式: GOSUB <行号>;2、描述:此指令将程序执行转移到指定的行号,并在返回时继续执行当前行。
3) RETURN1、指令格式: RETURN;2、描述:此指令将程序执行从 GOSUB转移到父程序,并从 GOTO转移到原程序行。
1、3条件判断指令1) IF/THEN/ELSE/ENDIF;1、指令格式: IF <条件> THEN <表达式> ELSE <表达式> ENDIF;2、描述:如果满足条件<条件>,则执行 THEN后面的表达式;否则执行 ELSE后面的表达式。
2) CASE/ESAC/ENDCASE;1、指令格式: CASE <变量> IN <表达式1> / <表达式2> /... / ENDCASE;2、描述:此指令根据变量<变量>的值选择要执行的表达式。
安川机器人命令一览所有指令介绍安川机器人命令一览所有指令介绍MOVJ功能以关节插补方式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面中不显示VJ=(再现速度)VJ:0.01~100.00%PL=(定位等级)PL:0~8NWAITUNTIL语句ACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVJ VJ=50.00PL=2NWAIT UNTIL IN#(16)=ON MOVL功能以直线插补方式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面中不显示V=(再现速度)、VR=(姿态的再现速度)、VE=(外部轴的再现速度)V:0.1~1500.0mm/秒1~9000cm/分R:0.1~180.0°/秒VE:0.01~100.00%PL=(定位等级)PL:0~8CR=(转角半径)CR:1.0~6553.5mmNWAITUNTIL语句ACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVL V=138PL=0NWAIT UNTIL IN#(16)=ON MOVC 功能用圆弧插补形式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面不显示V=(再现速度)、VR=(姿态的再现速度)、VE=(外部轴的再现速度)与MOVL相同。
PL=(定位等级)PL:0~8NWAITACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVC V=138PL=0NWAIT10基本命令一览DX10010.1移动命令10-2MOVS功能以自由曲线插补形式向示教位置移动添加项目位置数据、基座轴位置数据、工装轴位置数据画面不显示V=(再现速度)、VR=〈姿势的再现速度〉、VE=〈外部轴的再现速度〉与MOVL相同。
ABB机器人常用指令详解关键信息项:1、指令名称:____________________2、指令功能:____________________3、适用场景:____________________4、参数设置:____________________5、示例代码:____________________11 移动指令111 MoveL 指令MoveL 指令用于线性移动机器人的工具中心点(TCP)到指定的目标位置。
它以直线方式移动,确保路径是一条直线。
指令格式:MoveL ToPoint, Speed, Zone参数说明:ToPoint:目标位置的坐标。
Speed:移动速度。
Zone:逼近和离开目标位置的过渡区域大小。
112 MoveJ 指令MoveJ 指令用于关节运动,机器人以最快的速度将工具中心点移动到目标位置。
指令格式:MoveJ ToPoint, Speed, Zone参数说明:ToPoint:目标位置的关节角度。
Speed:移动速度。
Zone:逼近和离开目标位置的过渡区域大小。
12 输入输出指令121 SetDO 指令SetDO 指令用于设置数字输出信号的值。
指令格式:SetDO Signal, Value参数说明:Signal:要设置的数字输出信号的名称。
Value:设置的值,通常为 0 或 1。
122 WaitDI 指令WaitDI 指令用于等待数字输入信号达到指定的值。
指令格式:WaitDI Signal, Value, Timeout参数说明:Signal:要等待的数字输入信号的名称。
Value:期望的信号值。
Timeout:等待的超时时间,如果在超时时间内未达到指定值,则程序继续执行。
13 逻辑指令131 IF 指令IF 指令用于根据条件执行不同的操作。
指令格式:IF Condition THEN Statements ELSE Statements ENDIF 参数说明:Condition:判断条件。
机器人常用指令IF-如果满足条件,那么;否则MoveAbsJ-移动机械臂至**接头位置MoveC-使机械臂沿圆周移动MoveJ-通过接头移动,移动机械臂MoveL-使机械臂沿直线移动SetDO-改变数字信号输出信号值SetGO-改变一组数字信号输出信号的值Set-设置数字信号输出信号StartMove-重启机械臂移动Stop-停止程序执行StopMove-停止机械臂的移动WaitDI-等待直至已设置数字信号输入信号WaitDO-等待直至已设置数字信号输出信号WaitTime-等待给定的时间num-数值robtarget-位置数据------------------------------------------------------------------------------------- 机器人运用:1.waitTime:用于等待给定的时间例1:WaitTime0.5;程序执行等待0.5秒程序执行等待的最短时间(以秒计)为0s。
最长时间不受限制。
分辨率为0.001s。
详解:机器人程序指针执行到此条指令,必须等待0.5秒以后才继续往下执行!例2:WaitTime\InPos,0.5详解:在WaitTime指令后面加入了Inpos参数的含义就是:机器人到位且完全停止后才开始计时,时间到达0.5秒以后才继续往下执行!例3:MoveJp1,vmax,fine,tool2;WaitTime\InPos,0.5;MoveJp2,vmax,z30,tool2;详解:机器人到达P1位置点之后,并且机器人完全停止下来,才开始计时,时间到达0.5秒以后才机器人继续执行到达P2位置点。
2.WaitDI:用于等待,直至已设置数字信号输入例1:WaitDIdi4,1;仅在已设置di4输入后,继续程序执行。
详解:机器人程序指针执行到此条指令,需要等待开关信号di4为1的时候,才往下执行。
例2:WaitDIdi0,1\MaxTime:=3;详解:在WaitDIdi0,1指令后面加上了可选参数MaxTime:=3,则表示允许的最长等待时间3秒。
小黑Robot机器人命令大全与说明您好,欢迎您使用QQ机器人帮助手册,本手册将指引您更明晰地了解指令,说明等过程。
如果想续费,请提前购买:以下内容有三种颜色区分:红色——代表指令蓝色——代表功能橙色——代表重点和注意的事项索引一、续费、激活说明与指令(第2页)二、操作过程中的注意事项(第4页)三、机器人普通聊天指令说明(第5页)四、机器人普通指令(第6页)五、机器人特殊指令之——群管指令(第8页)六、机器人特殊指令之——便民指令(第12页)七、机器人特殊指令之——娱乐指令(第14页)续费、激活说明与指令当您购买机器人后,旺旺会自动发给您卡密,下面就是卡密的用法。
首先,您需要添加机器人QQ为好友,机器人QQ会在您付款后旺旺通知您添加好机器人后请发送指令:#充值+卡号+[群号]注意,指令前有#号,整条指令不算+号,群号有中括号“[]”如图:提示充值成功后,即可拉入此机器人进你的QQ群。
方法为,进入QQ群后,点击“群设置”——“邀请好友入群”——选中机器人如图:机器人会自动识别,如果您已授权群,那么机器人会自动同意进群邀请。
然后就可以开始您的聊天之旅啦!操作过程中的注意事项机器人利用云回复功能,更先进丰富的词库和智能判断系统。
因为这样智能,所以在很多人的群中经常会遇到刷屏、聊天频繁等情况。
进而腾讯会屏蔽或冻结QQ机器人。
当您发现机器人在群中不进行回复,而私聊却有回复。
这便是被腾讯屏蔽的结果。
如果遭遇屏蔽,请不要着急,耐心等待几分钟即可。
如果您有一些特殊原因,我们可以免费提供一个备用机器人,但需要注意的是,备用机器人有利有弊。
因为容易引起群内混乱,导致两个机器人被群友大肆调戏,造成恶劣影响。
为此,我们也没有什么特别的方法,毕竟是腾讯的关系。
所以请您谅解。
机器人普通聊天指令说明机器人可以进行调侃聊天,也可以询问资料,更可以运行特殊指令,如:管理指令,便民娱乐指令等。
这里要说一下普通指令普通指令就是普通的进行聊天,也可以适当的查询资料等。
开启/关闭聊天功能开启/关闭赌博功能开启/关闭签到功能开启/关闭成语接龙功能开启/关闭发言奖励功能开启/关闭刷屏扣分功能开启/关闭广播功能开启/关闭拍卖功能开启/关闭百度词库(默认的网络词库找不到后是否到百度上找答案)开启/关闭退群提示(在输出替换里增加一行已经退出本群!不显示退群提示!可永久避免退群提示。
)开启/关闭提醒群主功能(群内有发广告或刷屏时是否私聊提醒群主)开启/关闭智能提示功能(找不到答案时智能提示相关的问题)开放/关闭赠予功能(开放赠予功能的话,非vip也能赠予其他人物品)抢答开始/抢答结束开启/关闭抢答功能开启/关闭打劫功能开启/关闭查询功能开启/关闭猜数字功能开启/开放/关闭猜拳功能不处理加群请求自动同意加群自动拒绝加群女性才自动同意加群不处理加好友请求自动同意/拒绝加好友取消机器人被邀请加群时自动同意设置机器人被邀请加群时自动同意取消群友点歌有多首歌曲可选时显示智能提示设置群友点歌有多首歌曲可选时显示智能提示检测机器人是否已激活(在不方便在软件界面上点软件注册时,可在群里发此指令检测机器人qq号是否已经注册好了)用汉字格式显示数字用数字格式显示数字奖励所有人200金币(奖励群里所有人200金币)扣除所有人1万金币(扣除群里所有人1万金币)奖励所有人赞200(奖励群里所有人200个赞)扣除所有人赞100(扣除群里所有人100个赞)奖励所有vip200金币(奖励群里所有vip200金币)扣除所有vip1万金币(扣除群里所有vip1万金币)奖励所有vip赞200(奖励群里所有vip200个赞)扣除所有vip赞100(扣除群里所有vip100个赞)奖励/扣除13402429 6金币(只能在群里发,不能跟机器人私聊来发送)奖励219161023 13402429 10金币(机器人主人奖励指定群号中某个q号多少个金币)扣除219161023 13402429 10金币(机器人主人扣除指定群号中某个q号多少个金币)添加vip134024 30天(5小时、1个月、1年)添加vip219161023 134024 30天(5小时、1个月、1年)(机器人主人添加或删除指定群号中某个q号vip资格)增加有效期10天、增加有效期385479646 2个月(如果没指定诸如385479646的群号,则是增加当前群的有效期)查看有效期(查看当前群的有效期至哪一天)删除vip134024删除vip219161023 134024添加vip所有人删除vip所有人以群聊/私聊的方式回复清理红包(把之前一个人扔的红包清理干净,方便其他人重新发大红包)清理群图片文件结束猜数字(结束本局猜数字游戏,并且公布答案)vip列表查看管理员列表查看版本号查看违禁词列表设置主人13402429|68663216|35376062;151409645添加/删除管理员134024解除拉黑/拉黑134024清空黑名单(清空当前群的黑名单,所有的人都被解除拉黑)解除禁闭/禁闭134024(禁闭后群友对机器人说话,机器人不会回复)禁闭134024 30天(5小时、1个月、1年)禁闭219161023 134024 30天(5小时、1个月、1年)(机器人主人禁闭指定群号中某个q 号)解除禁闭134024解除禁闭219161023 134024禁闭所有人解除禁闭所有人禁言134024 10分钟(禁言后群友不能在群里发言,分钟二字可不打)禁言219161023 13402429 10分钟(禁言群号219161023中的13402429 10分钟)解除禁言134024 (取消禁言)解除禁言219161023 13402429(解除禁言群号219161023中的13402429)清除警告次数(如果有人因刷屏或发违禁词被机器人警告,可用此命令清除警告次数,还包括清除自动回复和点歌的数字快捷提示)清零13402429(积分清零,装备清零)清零整个群积分(清零整个群的积分和装备)销毁13402429(不清零积分,仅销毁13402429所有装备)销毁核弹13402429(仅销毁13402429的核弹装备)销毁宝物13402429(销毁13402429账户上的宝物)赎身12345(机器人主人强制为12345赎身踢黑134024 (踢出并拉黑134024)踢出134024 (机器人需要是群管理)踢出219161023 13402429(跟机器人私聊,踢出219161023群里的13402429)踢出黑名单中的人(有些黑名单里人,后来如果又被其他管理员同意加进群了,或者之前没有成功踢出群,可以再发此指令批量踢出群)踢黑219161023 13402429(跟机器人私聊,踢出并拉黑219161023群里的13402429)踢黑13402429(跟机器人私聊(或群聊),踢出并拉黑所有群里的13402429,以上3指令都仅限于创始人使用)踢出后20名(把积分排在倒数前20名的踢出群并清零积分)踢出低于-10 (把积分低于-10分的全部踢出群并清零积分)清零低于-10 (把积分低于-10分的全部清零)踢出赞后20名(把赞数目排在倒数前20名的踢出群并清零积分)踢出赞低于-10 (把赞数目低于-10的全部踢出群并清零积分)清零赞低于-10 (把赞数目低于-10的全部清零)清零所有不在群里的人积分(把已经不在群里的人的积分记录全部清除)清零所有虚拟号码清零最后发言天数超过30(超过30天没发言的都清零积分)踢出最后发言天数超过30(超过30天没发言的都踢出群并清零积分)更改踢出群时提示信息XXX起飞了设置/取消禁止管理员更改群规设置赌博难度系数120设置掉装备概率系数500设置赌博每次下注上限1000设置管理奖励积分上限2000设置新人发广告次数3设置猜拳奖励积分数10设置每个赞价值积分数100(获得赞之后可以抵积分)设置新人见习期时间5(5分钟见习期内新人不能发言)设置积分数小于2000 (一般发广告的都是新人,为防止误踢,可设积分上限)更改拒绝理由xxxx(拒绝的理由)更改验证消息xxxx(敲对了才能加入)更改加好友拒绝理由xxxx(拒绝的理由)更改加好友验证消息xxxx(敲对了才能加入)更改群欢迎词xxxx(欢迎词)允许/禁止普通群友开启或关闭聊天功能关闭机器人取消关闭机器人禁止跟机器人私聊取消禁止跟机器人私聊设置升级跟赞挂钩取消升级跟赞挂钩设置鄙视没用完则扣下一次签到的可用赞数取消鄙视没用完则扣下一次签到的可用赞数关闭机器人151409321(指定关闭151409321这个机器人)取消关闭机器人151409321(指定取消关闭151409321这个机器人)修改触发自动回复的前缀(默认为空)修改机器人昵称xxxx修改找不到回复时的默认回答xxxx设置自动回复倒计时0秒(可设置3秒之类)设置内容匹配率要大于30%设置/取消只有包含关键词才回复开启/关闭网络智能词库设置/取消仅私聊管理员回答问题设置/取消提示其他管理员不用回答问题设置/取消以群聊的方式征集答案设置/取消允许群友帮助机器人自学习设置/取消允许用群临时会话的方式设置/取消禁止网络词库设置/取消禁止本地公共词库设置/取消在群里显示各类提示问:你好答:你好(教机器人回答)问:你好答:优先回复你也好啊(“你也好啊”会添加到“优先设定的回复内容.txt”中)删除所有回答只要包含xxxx(比如含广告或不雅字眼的,如果是*.*,则删除所有)删除所有优先回复只要包含xxxx(优先设定的回复,只有机器人主人能删除)屏蔽广告xxxx(群友发此内容会被警告乃至踢出群并拉黑,而且可以屏蔽网络词库中对应的广告)解除屏蔽广告xxxx(针对网络词库和违禁词列表)设置群内广播周期60(默认60分钟,会整点报时)设置成语接龙超时时间45(默认45秒)设置抢答游戏超时时间60(默认60秒)设置签到积分奖励系数1(如果设成2,则每次签到两倍奖励)设置成语接龙奖励系数1(如果设成2,则每接对一次获双倍奖励)设置抢答游戏奖励系数1(如果设成2,则每次奖双倍)设置抢答游戏扣分系数1(如果设成2,则每次答错罚双倍)设置刷屏扣分系数1(如果设成2,则每次扣2金币)设置刷屏扣分起点次数7(默认刷屏超过7次则开始扣分)设置发起成语接龙消耗积分数1(默认发起1次成语接龙消耗1金币)设置每次赌博消耗积分数2(默认每赌博一次消耗2金币)设置每次打劫消耗积分数5(默认每赌博一次消耗5金币)设置每次查询消耗积分数1(默认每查询一次消耗1金币)设置签到周期8(默认8小时才能签到一次)设置赠送手续费10(赠送或跨群转移时收的手续费百分比)设置单张彩票金额10(默认10金币一张彩票)设置重复签到扣积分数1(如果没到签到时间,重复签到扣1分)设置幸运随机数消耗积分10(随机抽中一个群友,奖励他10金币,如果抽中自己则可获得N倍奖励)设置开奖时间12|20(默认中午12点和晚上20点,多个时间点用|隔开)设置抢答时前缀¥(必须以¥开头的句子,才会认为是在抢答,也可以设置为空白)设置每天允许赌博和打劫次数20(默认每天每人加起来只能打劫或赌博20次)更改群内广播内容xxxx(定时在群内发广播消息)更改允许兑入的群列表xxxx(哪些群可以把积分转移过来,多个群用分号分隔)更改积分单位名称xxxx(默认是金币,你也可以改成Q币、学分、G币之类的)更改等级名称与积分对应关系xxxx(左边等级名称,右边积分要求,多行一起发)添加等级xxxx(左边等级名称,右边积分要求,可单行或多行)更改群名片男性前缀xxxx(比如男性以♂开头,或gg、帅哥之类的称呼)更改群名片女性前缀xxxx(比如女性以♀开头,或者mm、靓女之类的字符)更改群名片人妖前缀xxxx(与男性、女性的前缀修改方法相同)批量修改名片(只有机器人主人才可以发此命令,一般只在机器人刚入群使用一次,要花4、5分钟才能改完一两千人)修改名片13402429(机器人必须是q群管理员,而且对方勾选了允许管理员帮助修改名片才行)修改名片13402429晨风(不按照qq昵称来修改,而是直接指定一个昵称)更改商店物品价格对照表xxxx(左边商品名称,右边价格,多行一起发)更改定时执行指令表xxxx(左边具体要执行的命令,右边是时间,多行一起发)添加商品xxxx(左边商品名称,右边价格,可单行或多行)删除商品xxxx(商品关键词,凡是包含此关键词的商品都会被删除)修改商品xxxx(左边商品名称,右边价格,一次只能一个商品)定时任务列表(查看定时任务列表)删除定时任务xxxx(定时任务时间,最好先发“定时任务列表”查看,然后原样复制进来进行删除)添加定时任务关闭打劫功能23点(左边具体要执行的命令,右边是时间)设置被踢下线后自动重新上线的等待时间3分钟(这个是方便你想用qq客户端异地登录修改qq设置、添加好友、加群之类的操作)执行命令(打开远程服务器上的程序,仅限于机器人的创始人,既默认群规里的主人)机器人重新登录(让机器人重新登录,仅限于机器人的创始人,既默认群规里的主人)机器人重新启动(让机器人重新启动,仅限于机器人的创始人,有可能要配合云打码功能才能有效解决验证码)机器人更换QQ号(如果你之前在机器人上登录过多个qq号,机器人收到此命令会自动切换到下一个qq号)强制机器人重新登录(大家可以先试上面的指令,不行再加“强制”二字)强制机器人更换QQ号(因为不加强制二字,机器会在返回提示消息后才执行操作,有时会执行不了)强制机器人重新启动(加“强制”二字后机器人收到此指令则立即执行)查看当前群列表刷新群列表刷新群欢迎词、刷新等级列表、刷新商品列表、刷新定时任务列表屏蔽84456670(屏蔽此群,也可以发“屏蔽晨风软件官方交流群(84456670)”之类的格式)开启84456670 87665443(开启群84456670,并且把87665443设置为这个群的机器人主人)加入群84456670(申请加入此群,仅限使用安卓协议时有效,腾讯有限制,可能每天加两三个群就加不了)退出群84456670(退出群号84456670,仅限使用安卓协议时有效)屏蔽所有群开启所有群临时屏蔽所有群(此操作只是临时性的批量屏蔽所有群,并不会改变每个群之前的屏蔽状态,也不会保存到设置中!)取消临时屏蔽所有群(此操作只是临时性取消屏蔽所有群,并不会改变每个群之前的开启状态,比如之前某个群是未开启的,执行此指令后依然不会开启!)设置打劫最低积分要求设置拍卖喊价间隔时间设置猜数字赔付倍数设置赎身赔偿倍数设置打劫等待时间设置群成员初始积分数设置彻底静默模式取消彻底静默模式停用机器人所有交互功能(停用机器人所有与用户交互的功能,比如聊天、签到、各种自定义游戏、查询等!)恢复机器人所有交互功能(恢复机器人所有与用户交互的功能,比如聊天、签到、各种自定义游戏、查询等!(但各个功能是否开启取决于之前的状态))设置所有群彻底静默模式取消所有群彻底静默模式关闭自定义游戏功能开启自定义游戏功能禁止积分为负数者玩游戏允许积分为负数者玩游戏禁止一人连续玩游戏允许一人连续玩游戏临时屏蔽所有群取消临时屏蔽所有群刷新群成员以确保每人都有积分记录立即保存积分文件(之后其它机器人qq号可以发“重新加载积分文件”来同步积分数据)重新加载积分文件(最好是在其它机器人qq号发了“立即保存积分文件”之后再对这个机器人上发此指令,这个qq之前应该一直处于“临时屏蔽所有群”的状态,在“重新加载积分文件”后再发“取消临时屏蔽所有群”)更改自定义小游戏更新网址更改群友自助购买充值网址同步网络上的自定义小游戏同步网络上的自定义小游戏http://www.cfxy.me/defgame3.txt 存款游戏查看充值记录禁止自动保存识别到的语音文件开启自动保存识别到的语音文件开启自动识别群语音消息)开启自动识别私聊语音消息禁止自动识别群语音消息禁止自动识别私聊语音消息暂停识别图片中的文字开启识别图片中的文字切换到卡片消息模式切换到普通消息模式开启接口功能关闭接口功能开启输入监控(允许通过在输入替换中添加多行:*.* http://127.0.0.1/testplug.dll之类的来针对用户输入的内容作出不同的回应。
(完整word版)ABB机器⼈程序指令汇总,推荐⽂档⼀指令格式⼆指令及其参数Data := ValueAccSet Acc RampActUnit MecUnitAdd Name AddValueBreakCallBy Var Name NumberClear NameClkReset ClockClkStart ClockClkStop ClockClose IODevice! CommentConfJ [\On] | [\Off]ConfL [\On] | [\Off]CONNECT Interrupt WITH Trap routine CorrCon DescrCorrDiscon DescrCorrWrite Descr DataCorrClearDeactUnit MecUnitDecr NameEOffsSet EaxOffs ErrWrite [ \W ] Header Reason[ \RL2] [ \RL3] [ \RL4]ExitExitCycleFOR Loop counter FROM Start value T O End value [STEP Step value] DO ... ENDFORGOTO LabelGripLoad LoadIDelete InterruptIF Condition ...IF Condition THEN ...{ELSEIF Condition THEN ...}[ELSE ...]ENDIFIncr NameIndAMove M ecUnit Axis [ \ToAbsPos ] | [ \ToAbsNum ] Speed[ \Ramp ] IndCMove M ecUnit Axis Speed [ \Ramp ] IndDMove M ecUnit Axis Delta Speed [ \Ramp ]IndReset MecUnit Axis [ \RefPos ] | [ \RefNum ] | [ \Short ] | [ \Fwd ] |[ \Bwd ] | [ \Old ]IndRMove MecUnit Axis [ \ToRelPos ] | [ \ToRelNum ] | [ \Short ] |[ \Fwd ] | [ \Bwd ] Speed [ \Ramp ]InvertDO SignalIODisable UnitName MaxTimeIOEnable UnitName MaxTimeISignalDI [ \Single ] Signal TriggValue InterruptISignalDO [ \Single ] Signal TriggValue InterruptISleep Interrupt ITimer [ \Single ] Time Interrupt IVarValue VarNo Value, InterruptIWatch InterruptLabe l:MoveAbsJ [ \Conc ] ToJointPos Speed [ \V ] | [ \T ] Zone [ \Z]Tool [\WObj ]MoveC [ \Conc ] CirPoint ToPoint Speed [ \V ] | [ \T ] Zone [ \Z]Tool [ \WObj ]MoveJ [ \Conc ] ToPoint Speed [ \V ] | [ \T ] Zone [ \Z ] Tool[ \WObj ] MoveL [ \Conc ] ToPoint Speed [ \V ] | [ \T ] Zone [ \Z ] Tool[ \WObj ] Open Object [\File] IODevice [\Read] | [\Write] | [\Append] | [\Bin] PathResol ValuePDispOn [ \Rot ] [ \ExeP ] ProgPoint Tool [ \WObj ]PDispSet DispFramePulseDO [ \PLength ] SignalRAISE [ Error no ]Reset SignalRETURN [ Return value ]Rewind IODeviceSearchC [ \Stop ] | [ \PStop ] | [ \Sup ] Signal SearchPoint CirPoint ToPoint Speed [ \V ] | [ \T ] Tool [ \WObj ]SearchL [ \Stop ] | [ \PStop ] | [ \Sup ] Signal SearchPoint ToPoint Speed [ \V ] | [ \T ] Tool [ \WObj ]Set SignalSetAO Signal Value SetDO [ \SDelay ] Signal ValueSetGO Signal ValueSingArea [ \Wrist] | [ \Arm] | [ \Off]SoftAct Axis Softness [\Ramp ]Stop [ \NoRegain ]TEST Test data {CASE Test value {, Test valu e} : ...}[ DEFAULT: ...] ENDTESTTPReadFK Answer String FK1 FK2 FK3 FK4 FK5 [\MaxTime] [\DIBreak] [\BreakFlag]TPReadNum Answer String [\MaxTime] [\DIBreak] [\BreakFlag] TPShow WindowTPWrite String [\Num] | [\Bool] | [\Pos] | [\Orient]TriggC CirPoint ToPoint Speed [ \T ] Trigg_1 [ \T2 ] [ \T3 ][ \T4] Zone Tool [ \WObj ]TriggInt TriggData Distance [ \Start ] | [ \Time ] InterruptTriggIO TriggData Distance [ \Start ] | [ \Time ] [ \DOp ] | [ \GOp ] |[\AOp ] SetValue [ \DODelay ] | [ \AORamp ]TriggJ ToPoint Speed [ \T ] Trigg_1 [ \T2 ] [ \T3] [ \T4]Zone Tool [ \WObj] TriggL ToPoint Speed [ \T ] Trigg_1 [ \T2] [ \T3] [ \T4]Zone Tool[ \WObj ] TuneServo MecUnit Axis TuneValueTuneServo MecUnit Axis TuneValue [\Type]UnLoad FilePath [\File]VelSet Override MaxWaitDI Signal Value [\MaxTime] [\TimeFlag]WaitDO Signal Value [\MaxTime] [\TimeFlag]WaitTime [\InPos] Time WaitUntil [\InPos] Cond [\MaxTime] [\TimeFlag] WHILE Condition DO ... ENDWHILEWrite IODevice String [\Num] | [\Bool] | [\Pos] | [\Orient][\NoNewLine] WriteBin IODevice Buffer NCharWriteStrBin IODevice StrWZBoxDef [\Inside] | [\Outside] Shape LowPoint HighPoint WZCylDef [\Inside] | [\Outside] Shape CentrePoint Radius WZDisable WorldZoneWZDOSet [\Temp] | [\Stat] WorldZone [\Inside] | [\Before] Signal SetValueWZEnable WorldZoneWZFree WorldZoneWZLimSup [\Temp] | [\Stat] WorldZone ShapeWZSphDef [\Inside] | [\Outside] Shape CentrePoint Radius 三函数及其参数Abs (Input)ACos (Value)AOutput (Signal)ArgName (Parameter)ASin (Value)ATan (Value)ATan2 (Y X)ByteToStr (ByteData [\Hex] | [\Okt] | [\Bin] | [\Char]) ClkRead (Clock) CorrReadCos (Angle)CPos ([Tool] [\WObj])CRobT ([Tool] [\WObj])DefDFrame (OldP1 OldP2 OldP3 NewP1 NewP2 NewP3) DefFrame (NewP1 NewP2 NewP3 [\Origin])Dim (ArrPar DimNo)DOutput (Signal)EulerZYX ([\X] | [\Y] | [\Z] Rotation)Exp (Exponent)GOutput (Signal)GetTime ( [\WDay] | [\Hour] | [\Min] | [\Sec] ) IndInpos MecUnit Axis IndSpeed MecUnit Axis [\InSpeed] | [\ZeroSpeed] IsPers (DatObj) IsVar (DatObj)MirPos (Point MirPlane [\WObj] [\MirY]) NumToStr (Val Dec [\Exp]) Offs (Point XOffset YOffset ZOffset)OrientZYX (ZAngle YAngle XAngle)ORobT (OrgPoint [\InPDisp] | [\InEOffs]) PoseInv (Pose) PoseMult (Pose1 Pose2)PoseVect (Pose Pos)Pow (Base Exponent) Present (OptPar) ReadBin (IODevice [\Time]) ReadMotor [\MecUnit ]AxisReadNum (IODevice [\Time])ReadStr (IODevice [\Time])RelTool (Point Dx Dy Dz [\Rx] [\Ry] [\Rz])Round ( Val [\Dec])Sin (An gl e )Sqrt (Value)StrFind (Str ChPos Set [\NotInSet])StrLen (Str)StrMap ( Str FromMap ToMap)StrMatch (Str ChPos Pattern)StrMemb (Str ChPos Set)StrOrder ( Str1 Str2 Order)StrPart (Str ChPos Len)StrToByte (ConStr [\Hex] | [\Okt] | [\Bin] | [\Char]) StrToVal ( Str Val ) Tan (Angle)TestDI (Signal)Trunc ( Val [\Dec] )ValToStr ( Val )。
机器人管理员命令大全开启/关闭聊天功能开启/关闭赌博功能开启/关闭签到功能开启/关闭成语接龙功能开启/关闭发言奖励功能开启/关闭刷屏扣分功能开启/关闭广播功能开启/关闭拍卖功能开启/关闭百度词库(默认的网络词库找不到后是否到百度上找答案)开启/关闭提醒群主功能(群内有发广告或刷屏时是否私聊提醒群主)开放/关闭赠予功能(开放赠予功能的话,非vip也能赠予其他人物品)抢答开始/抢答结束开启/关闭抢答功能开启/关闭打劫功能开启/关闭查询功能开启/关闭猜数字功能开启/开放/关闭猜拳功能不处理加群请求自动同意/拒绝加群女性才自动同意加群不处理加好友请求自动同意/拒绝加好友用汉字格式显示数字用数字格式显示数字奖励所有人200金币(奖励群里所有人200金币)扣除所有人1万金币(扣除群里所有人1万金币)奖励/扣除13402429 6金币(只能在群里发,不能跟机器人私聊来发送)奖励219161023 13402429 10金币(机器人主人奖励指定群号中某个q号多少个金币)扣除219161023 13402429 10金币(机器人主人扣除指定群号中某个q号多少个金币)添加vip134024 30天(5小时、1个月、1年)添加vip219161023 134024 30天(5小时、1个月、1年)(机器人主人添加或删除指定群号中某个q号vip资格)删除vip134024删除vip219161023 134024以群聊/私聊的方式回复清理红包(把之前一个人扔的红包清理干净,方便其他人重新发大红包)结束猜数字(结束本局猜数字游戏,并且公布答案)vip列表查看管理员列表查看违禁词列表添加/删除管理员134024解除拉黑/拉黑134024解除禁闭/禁闭134024(禁闭后群友对机器人说话,机器人不会回复)禁言134024 10分钟(禁言后群友不能在群里发言,分钟二字可不打)禁言219161023 13402429 10分钟(禁言群号219161023中的13402429 10分钟)解除禁言134024 (取消禁言)解除禁言219161023 13402429(解除禁言群号219161023中的13402429)清除警告次数(如果有人因刷屏或发违禁词被机器人警告,可用此命令清除警告次数)清零13402429(积分清零,装备清零)清零整个群积分(清零整个群的积分和装备)销毁13402429(不清零积分,仅销毁13402429所有装备)销毁核弹13402429(仅销毁13402429的核弹装备)赎身12345(机器人主人强制为12345赎身踢黑134024 (踢出并拉黑134024)踢出134024 (机器人需要是群管理)踢出219161023 13402429(跟机器人私聊,踢出219161023群里的13402429)踢黑219161023 13402429(跟机器人私聊,踢出并拉黑219161023群里的13402429)踢黑13402429(跟机器人私聊(或群聊),踢出并拉黑所有群里的13402429,以上3指令都仅限于创始人使用)踢出后20名(把积分排在倒数前20名的踢出群)踢出低于-10 (把积分低于-10分的全部踢出群)清零低于-10 (把积分低于-10分的全部清零)踢出赞后20名(把赞数目排在倒数前20名的踢出群)踢出赞低于-10 (把赞数目低于-10的全部踢出群)清零赞低于-10 (把赞数目低于-10的全部清零)更改踢出群时提示信息XXX起飞了设置/取消禁止管理员更改群规设置赌博难度系数120设置掉装备概率系数500设置赌博每次下注上限1000设置管理奖励积分上限2000设置新人发广告次数3设置猜拳奖励积分数10设置每个赞价值积分数100(获得赞之后可以抵积分)设置新人见习期时间5(5分钟见习期内新人不能发言)设置积分数小于2000 (一般发广告的都是新人,为防止误踢,可设积分上限)更改拒绝理由xxxx(拒绝的理由)更改验证消息xxxx(敲对了才能加入)更改加好友拒绝理由xxxx(拒绝的理由)更改加好友验证消息xxxx(敲对了才能加入)更改群欢迎词xxxx(欢迎词)允许/禁止普通群友开启或关闭聊天功能关闭机器人取消关闭机器人禁止跟机器人私聊取消禁止跟机器人私聊设置升级跟赞挂钩取消升级跟赞挂钩设置鄙视没用完则扣下一次签到的可用赞数取消鄙视没用完则扣下一次签到的可用赞数关闭机器人151409321(指定关闭151409321这个机器人)取消关闭机器人151409321(指定取消关闭151409321这个机器人)修改触发自动回复的前缀(默认为空)修改机器人昵称xxxx修改找不到回复时的默认回答xxxx设置自动回复倒计时0秒(可设置3秒之类)设置内容匹配率要大于30%设置/取消只有包含关键词才回复开启/关闭网络智能词库设置/取消仅私聊管理员回答问题设置/取消提示其他管理员不用回答问题设置/取消以群聊的方式征集答案设置/取消允许群友帮助机器人自学习设置/取消允许用群临时会话的方式设置/取消禁止网络词库设置/取消禁止本地公共词库设置/取消在群里显示各类提示问:你好答:你好(教机器人回答)问:你好答:优先回复你也好啊(“你也好啊”会添加到“优先设定的回复内容.txt”中)删除所有回答只要包含xxxx(比如含广告或不雅字眼的,如果是*.*,则删除所有)删除所有优先回复只要包含xxxx(优先设定的回复,只有机器人主人能删除)屏蔽广告xxxx(群友发此内容会被警告乃至踢出群并拉黑,而且可以屏蔽网络词库中对应的广告)解除屏蔽广告xxxx(针对网络词库和违禁词列表)设置群内广播周期60(默认60分钟,会整点报时)设置成语接龙超时时间45(默认45秒)设置抢答游戏超时时间60(默认60秒)设置签到积分奖励系数1(如果设成2,则每次签到两倍奖励)设置成语接龙奖励系数1(如果设成2,则每接对一次获双倍奖励)设置抢答游戏奖励系数1(如果设成2,则每次奖双倍)设置抢答游戏扣分系数1(如果设成2,则每次答错罚双倍)设置刷屏扣分系数1(如果设成2,则每次扣2金币)设置刷屏扣分起点次数7(默认刷屏超过7次则开始扣分)设置发起成语接龙消耗积分数1(默认发起1次成语接龙消耗1金币)设置每次赌博消耗积分数2(默认每赌博一次消耗2金币)设置每次打劫消耗积分数5(默认每赌博一次消耗5金币)设置每次查询消耗积分数1(默认每查询一次消耗1金币)设置签到周期8(默认8小时才能签到一次)设置赠送手续费10(赠送或跨群转移时收的手续费百分比)设置单张彩票金额10(默认10金币一张彩票)设置重复签到扣积分数1(如果没到签到时间,重复签到扣1分)设置幸运随机数消耗积分10(随机抽中一个群友,奖励他10金币,如果抽中自己则可获得N倍奖励)设置开奖时间12|20(默认中午12点和晚上20点,多个时间点用|隔开)设置抢答时前缀¥(必须以¥开头的句子,才会认为是在抢答,也可以设置为空白)设置每天允许赌博和打劫次数20(默认每天每人加起来只能打劫或赌博20次)更改群内广播内容xxxx(定时在群内发广播消息)更改允许兑入的群列表xxxx(哪些群可以把积分转移过来,多个群用分号分隔)更改积分单位名称xxxx(默认是金币,你也可以改成Q币、学分、G 币之类的)更改等级名称与积分对应关系xxxx(左边等级名称,右边积分要求,多行一起发)添加等级xxxx(左边等级名称,右边积分要求,可单行或多行)更改群名片男性前缀xxxx(比如男性以♂开头,或gg、帅哥之类的称呼)更改群名片女性前缀xxxx(比如女性以♀开头,或者mm、靓女之类的字符)批量修改名片(只有机器人主人才可以发此命令,一般只在机器人刚入群使用一次,要花4、5分钟才能改完一两千人)修改名片13402429(机器人必须是q群管理员,而且对方勾选了允许管理员帮助修改名片才行)修改名片13402429晨风(不按照qq昵称来修改,而是直接指定一个昵称)更改商店物品价格对照表xxxx(左边商品名称,右边价格,多行一起发)更改定时执行指令表xxxx(左边具体要执行的命令,右边是时间,多行一起发)添加商品xxxx(左边商品名称,右边价格,可单行或多行)删除商品xxxx(商品关键词,凡是包含此关键词的商品都会被删除)修改商品xxxx(左边商品名称,右边价格,一次只能一个商品)定时任务列表(查看定时任务列表)删除定时任务xxxx(定时任务时间,最好先发“定时任务列表”查看,然后原样复制进来进行删除)添加定时任务关闭打劫功能23点(左边具体要执行的命令,右边是时间)设置被踢下线后自动重新上线的等待时间3分钟(这个是方便你想用qq客户端异地登录修改qq设置、添加好友、加群之类的操作)执行命令(打开远程服务器上的程序,仅限于机器人的创始人,既默认群规里的主人)机器人重新登录(让机器人重新登录,仅限于机器人的创始人,既默认群规里的主人)机器人重新启动(让机器人重新启动,仅限于机器人的创始人,有可能要配合云打码功能才能有效解决验证码)机器人更换QQ号(如果你之前在机器人上登录过多个qq号,机器人收到此命令会自动切换到下一个qq号)强制机器人重新登录(大家可以先试上面的指令,不行再加“强制”二字)强制机器人更换QQ号(因为不加强制二字,机器会在返回提示消息后才执行操作,有时会执行不了)强制机器人重新启动(加“强制”二字后机器人收到此指令则立即执行)查看当前群列表刷新群列表刷新群欢迎词、刷新等级列表、刷新商品列表、刷新定时任务列表屏蔽84456670(屏蔽此群,也可以发“屏蔽晨风软件官方交流群(84456670)”之类的格式)开启84456670(开启此群)屏蔽所有群开启所有群。