7.机器人基本指令
- 格式:ppt
- 大小:1.33 MB
- 文档页数:23
ABB机器人RAPID常用指令详解-中文1.88.MoveAbsJ—把机器人移动到绝对轴位置用途:MoveAbsJ(绝对关节移动)用来把机器人或者外部轴移动到一个绝对位置,该位置在轴定位中定义。
使用实例:● 终点是一个单一点● 对于IR6400C中的不明确的位置,例如携带超过机器人范围的工具运动。
MoveAbsJ 指令中机器人的最终位置,既不受工具或者工作对象的影响,也不受激活程序更换的影响。
但是机器人要用到这些数据来计算负载、TCP速度和转角点。
相同的工具可以被用在相邻的运动指令中。
机器人和外部轴沿着一个非直线的路径移动到目标位置。
所有轴在同一时间运动到目标位置。
该指令只能被用在主任务T_ROB1中,或者在多运动系统中的运动任务中。
基本范例:该指令的基本范例说明如下。
也可参看第207 页更多范例。
例1 MoveAbsJ p50, v1000, z50, tool2;机器人将携带工具tool2 沿着一个非线性路径到绝对轴位置p50,以速度数据v1000和zone数据z50。
例2 MoveAbsJ *, v1000\T:=5, fine, grip3;机器人将携带工具grip3 沿着一个非线性路径到一个停止点,该停止点在指令中作为一个绝对轴位置存储(用*标示)。
整个运动需要5秒钟。
项目:MoveAbsJ [\Conc] ToJointPos [\ID] [\NoEOffs] Speed [\V] | [\T] Zone [\Z] [\Inpos] Tool [\Wobj][\Conc]:并发事件数据类型:switch当机器人正在移动的时候执行的后续指令。
该项目通常不使用,但是当和外部设备通讯、不需要同步的时候可以用来缩短循环周期。
当使用项目\Conc的时候,连续运动指令的数量限制为5。
在包含StorePath-RestoPath的程序段中不允许包含项目\Conc的运动指令。
如果该项目忽略并且ToJointPos不是一个停止点,在机器人到达程序zone之前一段时间后续指令就开始执行了。
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
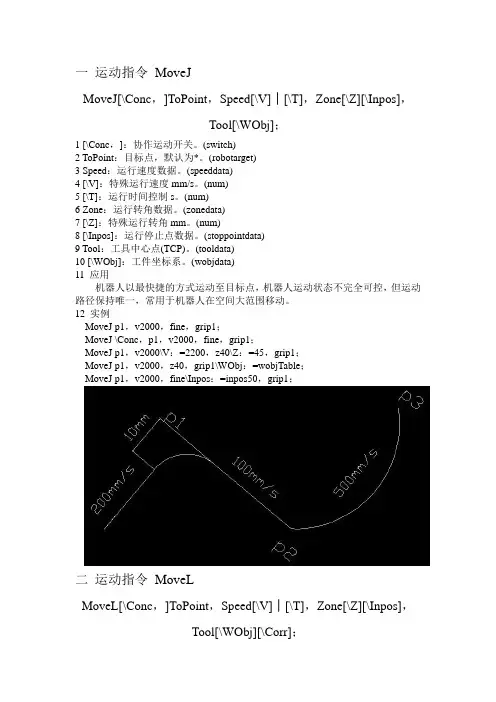
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。


工业机器人常用的运动指令-回复标题:工业机器人常用的运动指令详解在现代工业生产中,工业机器人已经成为不可或缺的一部分。
它们能够执行各种复杂的任务,提高生产效率,保证产品质量。
而这一切的基础,就是工业机器人所使用的运动指令。
以下我们将详细解析工业机器人常用的运动指令。
一、基础运动指令1. 直线运动指令(Linear Move):这是最基本的运动指令,用于指示机器人沿直线从一个位置移动到另一个位置。
该指令需要指定起点和终点的坐标,以及期望的运动速度和加速度。
2. 关节运动指令(Joint Move):与直线运动指令不同,关节运动指令是通过控制机器人的各个关节来实现运动的。
这种指令通常用于需要精确控制机器人姿态的情况。
3. 圆弧运动指令(Circular Move):该指令用于让机器人沿着圆弧路径移动。
需要指定圆弧的起点、终点和圆心坐标,以及期望的运动速度和加速度。
二、复合运动指令1. 平移运动指令(Translation Move):这是一种复合运动指令,用于让机器人在保持自身姿态不变的情况下,沿某个方向进行平移。
2. 旋转运动指令(Rotation Move):这也是一个复合运动指令,用于让机器人在保持自身位置不变的情况下,绕某个轴进行旋转。
三、特殊运动指令1. 点位运动指令(PTP Move):点位运动指令是指机器人从一个点快速移动到另一个点的运动方式,常用于需要快速定位的场合。
2. 连续轨迹运动指令(CP Move):连续轨迹运动指令是指机器人在运动过程中,其各关节的速度和加速度保持连续变化,从而使得机器人能够沿着平滑的轨迹运动。
3. 指定速度运动指令(Velocity Move):这种指令允许用户直接指定机器人的运动速度,而不是具体的运动路径。
机器人将根据这个速度信息自行计算出合适的运动路径。
四、高级运动指令1. 力控运动指令(Force Control):力控运动指令可以让机器人在执行任务时,能够感知并控制作用在其上的力,这对于需要精细操作的任务非常有用。
KUKA机器人程序命令一、概述KUKA机器人是一种广泛应用于工业自动化领域的机器人,其高度的灵活性和适应性使得它在众多行业中都有广泛的应用。
为了能够控制和使用KUKA机器人,我们需要通过编写程序来对其进行操作。
下面将介绍一些常用的KUKA机器人程序命令。
二、基本命令1、PTP(Point to Point):这是最基本的运动指令,可以控制机器人在空间的任意两点之间进行运动。
PTP指令需要指定起始位置和目标位置,机器人会以最短路径的方式进行移动。
2、LIN(Linear):这个指令可以让机器人在两点之间进行线性插补。
与PTP指令不同,LIN指令可以让机器人在两点之间进行速度和加速度的插补,实现更加平滑的运动。
3、SCUR(Scaled Curvilinear):这个指令可以让机器人在两点之间进行曲线插补。
SCUR指令可以让机器人在两点之间进行速度和加速度的插补,实现更加平滑的运动。
4、STOP:停止指令用于停止机器人的运动。
当执行STOP指令时,机器人会立即停止当前的运动。
三、高级命令1、MOVE_L:这是一个高级运动指令,可以让机器人在两个目标点之间进行线性插补。
与LIN指令相比,MOVE_L指令可以同时指定多个目标点,让机器人按照预设的路径进行运动。
2、MOVE_P:这是一个高级运动指令,可以让机器人在两个目标点之间进行曲线插补。
与SCUR指令相比,MOVE_P指令可以同时指定多个目标点,让机器人按照预设的路径进行运动。
3、ARC:这是一个高级运动指令,可以让机器人在两个目标点之间进行圆弧插补。
ARC指令可以让机器人在两点之间进行速度和加速度的插补,实现更加平滑的运动。
4、JMP(Jump):这是一个高级控制指令,可以让机器人在两个目标点之间进行跳跃式运动。
JMP指令需要指定起始位置、目标位置和跳跃高度等参数,机器人会以最短路径的方式进行跳跃式运动。
四、程序结构在编写KUKA机器人程序时,需要遵循一定的程序结构。
一、scara机器人各组成单元基本功能1. 前置设备组成:scara机器人通常由基座、臂部、手部和控制系统组成。
基座用于支撑整个机器人,臂部和手部负责执行各项任务,控制系统则是整个机器人的“大脑”。
基础设备的设计和功能会直接影响机器人的性能和适用范围。
2. 机械臂:scara机器人通常使用具有水平关节的机械臂,使得机械臂在平面内能够高效地执行各项任务。
机械臂的关节灵活度和稳定性是其基本功能,直接影响着机器人的精准度和稳定性。
3. 手部夹具:scara机器人手部通常配有夹具,用于抓取、移动和放置物体。
夹具的设计和功能对机器人的灵活性和适用性有着重要影响,不同类型的夹具可以使机器人适用于不同的任务场景。
4. 控制系统:scara机器人的控制系统可以通过编程来指导机器人执行各种任务,包括移动、抓取、放置等。
控制系统的智能化程度和稳定性对于机器人的操作效率和准确性有着重要影响。
二、scara机器人的操作方法1. 编程操作:scara机器人通常可以通过编程来指导执行任务,编程可以采用代码编写、图形化编程等不同方式。
编程操作需要对机器人的控制系统有较深的了解,适用于对机器人有一定了解或需要执行复杂任务的场景。
2. 手动操作:scara机器人也可以通过手动操作来执行任务,手动操作通常可以通过操控面板、遥控器等方式进行。
手动操作简单直观,适用于对机器人不太了解或执行简单任务的场景。
三、scara机器人的常用指令1. 移动指令:机器人移动是其最基本的操作之一,常用的移动指令包括直线移动、旋转移动等。
通过移动指令可以使机器人达到指定位置,执行相应任务。
2. 夹取指令:夹取是机器人常见的操作之一,通过夹取指令可以使机器人抓取目标物体并将其移动至指定位置。
3. 放置指令:放置是机器人的另一常见操作,通过放置指令可以使机器人将目标物体放置到指定位置。
四、scara机器人总结与个人观点总体来看,scara机器人作为自动化生产设备,在工业制造和物流领域有着广泛的应用。
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
ABB机器人简单操作指南1.了解机器人的基本结构和组成部件ABB机器人主要由机械臂、控制柜和操作面板组成。
机械臂由多个关节组成,每个关节都由伺服电机驱动,带有编码器进行位置控制。
控制柜是机器人的主要电子控制单元,包含电源、电机驱动器、控制卡和各种传感器。
操作面板用于对机器人进行各种操作和设置。
2.连接机器人和控制柜将机器人和控制柜连接在一起。
确保所有的连接器正确连接,并检查电源是否正常连接。
确保机器人和控制柜间的通信正常。
3.打开控制柜电源打开控制柜电源并等待机器人完成初始化。
在初始化过程中,机器人会进行自检和各种安全检查。
确保在机器人完成初始化之前不要进行任何操作。
4.设置机器人的工作区域使用操作面板进入机器人的设置菜单,设置机器人的工作区域。
可以设置工作区域的大小、位置和限制等。
5.创建机器人程序使用ABB机器人编程软件创建机器人程序。
机器人程序由一系列的指令组成,用于控制机器人的运动和操作。
可以使用编程语言或者图形化编程界面来创建机器人程序。
6.上传机器人程序将机器人程序上传到机器人控制柜中。
使用操作面板或者软件界面进行程序上传,并等待上传完成。
7.设置机器人的运动参数在机器人程序中设置机器人的运动参数,如速度、加速度和遵从度等。
这些参数会影响机器人的运动效果和安全性。
8.执行机器人程序使用操作面板或者远程控制软件执行机器人程序。
确保在执行程序之前,机器人周围没有任何障碍物,并确保机器人能够自由移动。
9.监控机器人的运行状态在执行机器人程序时,通过操作面板或者远程控制软件监控机器人的运行状态。
可以查看机器人的姿态、速度和位置等信息。
10.进行机器人的维护和保养定期进行机器人的维护和保养工作,如清洁机械臂、检查电源和连接器等。
确保机器人的各个部件处于良好的工作状态。
总结:以上是ABB机器人的简单操作指南。
了解机器人的基本结构和组成部件,连接机器人和控制柜,打开控制柜电源并等待机器人完成初始化,设置机器人的工作区域,创建和上传机器人程序。
ABB机器人的程序数据要点1.程序指令:-ABB机器人的程序通常由基本指令组成,如移动、旋转、控制等。
- 移动指令包括直线移动(MoveL)、圆弧移动(MoveC)等,用于机器人的路径规划。
- 旋转指令包括旋转(Rotate)和朝向(Orient)等,控制机器人的朝向和姿态。
- 控制指令用于控制机器人的操作流程,如条件判断(If)、循环(Loop)等。
2.坐标系:- ABB机器人使用基于DH(Denavit-Hartenberg)参数的坐标系来描述机器人的位置和姿态。
- 坐标系由基点(Base)、工具(Tool)和用户定义的坐标系(Wobj)组成。
-基点是机器人的基准位置,工具是机器人的末端执行器,用户定义的坐标系用于特定任务或对象。
3.速度:-ABB机器人的速度指定机器人的运动速度,包括关节速度和末端速度。
- 关节速度(Speed)指定机器人各个关节的运动速度,单位为°/s或rad/s。
- 末端速度(Tool Speed)指定机器人末端执行器的运动速度,单位为mm/s。
4.路径规划:-路径规划是指机器人在执行任务时如何规划运动路径,以达到最佳效果。
-ABB机器人的路径规划通常使用直线插值和圆弧插值。
- 直线插值(Linear Interpolation)用于在直线路径上进行均匀的插值运动。
- 圆弧插值(Circular Interpolation)用于在圆弧路径上进行均匀的插值运动。
5.传感器数据:-ABB机器人可以与各种传感器进行连接,包括视觉传感器、力传感器等。
-视觉传感器可以用于机器人的视觉定位、目标检测等任务。
-力传感器可以用于机器人的力控制、物体抓取等任务。
-传感器数据可以通过机器人的IO接口进行读取和控制。
6.通信接口:-ABB机器人通常可以通过以太网、RS232等接口与外部设备进行通信。
-以太网接口用于机器人与上位控制系统、其他设备之间的数据交换。
-RS232接口用于机器人与外部设备之间的串行通信。
猫耳直播间机器人指令大全猫耳直播间是一个非常受欢迎的直播平台,有许多机器人可以帮助主播和观众进行互动。
这些机器人能够执行各种指令,包括管理直播间、提供娱乐互动等。
下面是猫耳直播间机器人的指令大全,希望能够给大家带来帮助和指导。
1. 管理指令:- !封禁 [用户名] [时长]:封禁某个用户的账号,在直播间中不能进行任何操作,时长可以设置。
- !解封 [用户名]:解封被封禁的用户。
- !踢人 [用户名]:将某个用户从直播间中踢出。
- !禁言 [用户名] [时长]:禁言某个用户,在直播间中不能进行聊天操作,时长可以设置。
- !解禁言 [用户名]:解除某个用户的禁言状态。
2. 互动指令:- !点歌 [歌曲名]:点歌功能可以让观众选择自己喜欢的歌曲进行播放。
- !抽奖 [奖品]:开启抽奖功能,可以给观众送出一些小礼物或者奖品。
- !签到:观众可以通过签到指令参与主播设置的签到活动,获得一些积分或者礼物。
- !送礼 [用户名] [礼物名]:观众可以通过送礼指令给主播或其他观众送礼物,展示自己的支持和厚爱。
- !抢红包:主播可以发放红包,而观众可以通过抢红包指令参与抢夺,抢到的红包可以获得一些积分或者礼物。
3. 查询指令:- !排行榜:查询主播或观众的积分、等级等排行榜信息。
- !直播间信息:查询直播间的基本信息,包括观众数量、直播时长等。
- !用户信息 [用户名]:查询某个用户的基本信息,包括积分、等级等。
- !礼物信息 [礼物名]:查询某个礼物的相关信息,包括价值、使用方式等。
4. 其他指令:- !翻译 [语言] [内容]:可以将其他语言翻译为中文或其他语言。
- !笑话:机器人会讲一些搞笑的笑话给观众解乏。
- !提醒 [时间] [内容]:设置定时提醒功能,提醒主播或观众某件事情。
- !投票 [选项1] [选项2] ...:开启投票功能,可以让观众投票选择某个选项。
- !斗图:机器人会发送一些表情包或者有趣的图片给观众。
库卡机器人基坐标偏移指令库卡机器人是一种广泛使用的工业机器人,其通过编程控制进行自主工作。
在多种应用场景下,如焊接、加工等,机器人的精准性是至关重要的。
然而,由于各种原因,例如机器人初始结构不对称以及安装位置不准确,可能会导致机器人基础坐标偏移。
本文将介绍库卡机器人基础坐标偏移指令。
库卡机器人基础坐标系是指机器人的基础坐标系。
它由机器人的两个轴线(X轴,Y轴),以及第三轴线(Z轴)的交点组成。
这个交点被称为机器人的基础点。
通过将参照点与基础点对齐,可以确保机器人的精度。
当机器人的基础坐标偏移后,它的位置和姿态不再精准。
为了纠正这种偏移,可以使用基础坐标偏移指令,即"BASE_OFS"指令。
BASE_OFS指令可以将机器人基础坐标系中的X,Y,Z轴进行调整,并且可以设置相应的角度偏移。
BASE_OFS指令有两种模式,即相对模式和绝对模式。
在相对模式下,机器人将以当前机器人位置为参考点,通过指定的坐标将机器人的基础坐标系偏移。
在绝对模式下,机器人将以机器人的起始点为参考点,将机器人基础坐标系偏移到指定的坐标处。
BASE_OFS指令的语法如下:BASE_OFS {X,Y,Z,A,B,C} [, T='mode'];其中,“X”、“Y”和“Z”是以毫米为单位的坐标偏移量,“A”、“B”和“C”分别表示绕X、Y、Z轴的角度偏移量。
例如,如果要在X轴上偏移100毫米,则可以使用“BASE_OFS 100,0,0,0,0,0”指令。
“T”是可选参数,它表示指令的模式。
如果省略了“T”参数,则默认为相对模式。
如果“T”参数设置为“ABS”,则将使用绝对模式。
在使用BASE_OFS指令时,需要注意以下几点:1.机器人必须在调用BASE_OFS指令时处于S运行模式。
否则,指令将无法执行。
2.机器人将在相对于当前姿态的位置上移动,因此需要确保机器人的当前姿态能够容纳这些移动。
如果位置和姿态不能支持这些变化,则需要首先移动机器人的末端并调整其姿态。
abb机器人offs指令用法以下是 7 条关于“abb 机器人 offs 指令用法”的内容:1. 嘿,你可知道 abb 机器人的 offs 指令简直太好用啦!就好比你要让机器人去拿一个东西,你用 offs 指令就能微调它的位置呀!比如说,机器人要去抓取桌子上的杯子,你就可以用offs 来让它稍微偏一点去准确抓住,神奇吧!2. 哇塞,abb 机器人 offs 指令的用法真的能带来好多惊喜呢!想象一下,这就像给机器人安装了一个精准导航,让它能精确到毫厘呢!比如给机器人下达任务去安装一个小零件,通过offs 指令来微调位置,就能完美安装啦,是不是很厉害!3. 哎呀呀,abb 机器人的 offs 指令用起来可太有意思啦!就像给机器人开了个小后门,能让它走得更准呢!就像要机器人把一个小物件从这挪到那,用 offs 指令来一点一点调整,它就能乖乖听话做到啦,爽不爽!4. 嘿呀,你们想想看,abb 机器人的 offs 指令那可真是太神了呀!这不就像是给机器人一支魔法笔,能画出最精确的路线嘛!比如机器人要在一个复杂的环境中穿梭,用offs 指令来调整路径,它就能轻松通过啦,太牛了吧!5. 哇哦,abb 机器人的 offs 指令简直绝了呀!好似给机器人一把神奇的钥匙,能打开精准之门呢!像是让机器人去对接一个接口,用 offs 来微调角度,一下子就对上啦,厉害不厉害!6. 啊呀,abb 机器人 offs 指令真的值得好好探索呀!这不就像是给机器人装上了最敏锐的触角,能精确感知位置呀!假如让机器人去摆放一些物品,用 offs 指令来逐个调整摆放位置,多完美呀,难道不赞吗!7. 哎呀,abb 机器人 offs 指令真的是个宝贝呀!就跟给机器人戴上了一副超级瞄准镜一样!比如让机器人去进行一个精细的焊接,用 offs 指令来让它精确对好位置,焊缝漂亮极了,还能说这不够厉害吗!我的观点结论就是:abb 机器人的 offs 指令真的是超级实用且非常强大,学会用它能让机器人工作变得更加精彩和精确!。