静态电子轨道衡相关问题
- 格式:doc
- 大小:24.50 KB
- 文档页数:5
静态电子轨道衡概述静态电子轨道衡是一种基于静电作用原理的电子秤。
其工作原理类似于机械秤,但使用的是电子感应原理取代了机械结构。
静态电子轨道衡可用于微量物质测量,如微粒、纳米颗粒和生物分子等。
静电衡体系可以分为电极、基座和电子天平舱,其中电极可以通过微调实现精密的平衡校准,基座用于作为整个衡器载体,而电子天平舱则是放置待测物体的位置。
原理静态电子轨道衡采用了电容称重法原理,即待测物体放置在电极之间时会引起电容的变化,而根据电容的变化可以计算出物体的重量。
具体原理如下:1.待测物体放置在衡器上后,会在衡器内产生一个电场。
2.电子天平舱内有一对高精度的感应电极,它们会测量该电场引起的电容变化。
3.根据电容变化可以计算出物体的重量。
应用静态电子轨道衡具有高精度、高灵敏度、无需校正和调整、易于自动化等优点,因此被广泛应用于各种微量物质测量领域。
1.生物学领域:用于DNA测量、蛋白质测量和细胞重量检测。
2.粒子物理学领域:用于测量微小粒子或颗粒的重量和质量分布。
3.化学分析领域:用于微量化学分析、溶液质量测量和药物研究等。
优缺点对比优点1.静电电子天平舱采用了无需机械部件的静电作用原理,因此不存在摩擦误差和延迟响应等问题。
2.静电电子天平舱中的电极精度高,能够进行极小的调整,因此可以实现更高的精度和分辨率。
3.静态电子轨道衡具有质量响应速度较快的优点,可以快速获取物质质量的变化。
4.静态电子轨道衡采用了数字化表示方法,可以实现数字、精准、可靠、强大的数据连接和绘图处理。
缺点1.静态电子轨道衡精度会受到环境温度、震动、电磁干扰等因素的影响,需要在正确的环境条件下使用。
2.静态电子轨道衡相对于一般的电子秤,价格较高。
总结静态电子轨道衡是一种高精度的电子秤,是现代微量物质测量领域的重要工具之一。
其采用静电作用原理,结构简单、精度高、相对稳定,广泛应用于生物学、颗粒物理学、化学分析等领域。
但同时也要注意环境温度、震动、电磁干扰等因素的影响,以及相对较高的价格。
电子汽车衡、轨道衡、地上衡故障及排除方法显示重量不准确连接件断裂,使秤体位移更换连接件连接件"O"型密封圈破裂更换"O"型密封圈轨道衡的过渡轨卡住称量轨重新调整过渡轨限位间隙过大或过小重新调整限位地上衡框架或台面变形更换或整形秤体水平度不能满足要求用不锈钢垫板垫平传感器秤体周围或秤台下有杂物卡住秤台清理秤台周围接线盒器件老化或电器松动更换接线盒或重新焊接电位器卸荷螺钉碰到传感器的变形梁重新调整超载限位间隙昼夜温差过大或冬天预热不够冬天仪表通电30分钟预热后再称重计量传感器损坏更换传感器仪表运算放大部分损坏更换仪表PCB主板显示不稳定输出电缆与仪表连接处接触不良重新焊接电缆线传感器接头处受潮烘干风力过大造成仪表显示不稳定重新调整仪表的滤波参数接线盒内接线虚焊重新焊接仪表无良好且单独的接地线设置单独的接地线仪表使用的外部电源不稳定使用照明电源及配置交流稳压电源接线盒受潮酒清清洗后用电吹风吹干传感器电缆线缘强度降低更换传感器仪表的放大或电源部分损坏更换仪表PCB主板接线盒内主板对外壳绝缘强度降低更换接线盒内主板显示出现(正超载)或 -(负超载)仪表内+15V电源坏更换仪表PCB主板仪表内运算放大器2654坏更换仪表PCB主板仪表激励基准电压坏更换仪表PCB主板传感器零点输出过大更换传感器因电焊等造成传感器内应变计断更换传感器接线盒受潮用吹风机吹干D型式九芯插头脱落、受潮、接触不良测量后采取相应的措施,如重新焊接等开机后无显示或自检后无显示外部电源未进入仪表检查外部电源仪表外部EX线短路用万用表分段测量,确定短路位置仪表PCB主板坏更换仪表PCB主板仪表保险丝坏烧保险丝传感器输入阻抗变小造成激励电压负载加重更换传感器仪表PCB主板坏更换仪表PCB主板仪表上的电源滤波器坏更换电源滤波器仪表上的电源变压器坏更换电源变压器仪表开机不显示正常的毛重零传感器零点发生漂移回归零位(详见仪表说明书或(传感器的零漂)技术手册)限位被卡住或秤台下有杂物重新调整方向限位或清理秤台四周其他故障键盘操作无效1.键盘坏,更换键盘2.键盘坏一般整排或整列无效,如果单个键盘无效请检查仪表内对应的参数设置仪表显示E6 接线盒接线错误外部设备不能1.仪表主板上接口电路坏,更换PCB主板2.打印机,大屏幕等坏,更换外部设备3.连接外部设备的电缆线脱落成断裂4.仪表参数设置错误,对照说明书修改仪表参数显示仪表某些参数设置不当将引起仪表显示数据异常或操作异常:(去皮功能)出厂值为1如设置为0,则仪表操作中按 "Tare"键去皮无效(皮重内锁功能)出厂值为0如设置为1,则仪表开机捕捉零位,在此期间仪表显示EEE或-EEE,因传感器有零漂,仪表开机时不一定能捕捉到毛重零,这样仪表就将一直显示EEE而不进入称重状态。
静态轨道衡零漂问题分析报告一、概述静态轨道衡一般由轨道衡秤体(限位拉杆、过度块)、电器(接线盒、传感器、仪表、大屏幕、电脑)、软件三部分组成。
二、正常工作流程1、秤体空载,静态轨道衡仪表显示0.00t2、空火车完全上衡,进行装车作业3、记录仪表显示数值,比如90.00t4、重火车完全下衡,仪表显示0.00t三、零漂问题现象1、秤体空载,静态轨道衡仪表显示0.00t,但不稳定,几秒钟或几分钟后,仪表显示与零点相差正负几十公斤甚至几百公斤等。
2、装车作业完成后,重火车完全下衡,仪表显示与零点相差正负几十公斤甚至几百公斤等。
四、分析原因1、仪表设置中有零点跟踪范围、判稳时间间隔、判稳条件三项可以影响零漂,正确设置,此原因影响因素较小。
2、一般静态轨道衡分度值设为20公斤,所以零点范围在-10公斤到+10公斤之间。
秤体空载时,零点变为-20公斤、-40公斤或+20公斤、+40公斤都是正常的,当回到零点后是可以稳定的。
大型机械运动、电磁波干扰仪表、仪表本身、环境因素、传感器损坏都有可能造成零点不稳定;重车下衡后,零点不归零,可能是由于传感器应变片没有回到位或过位影响电信号输出、限位拉杆没有回到位或紧住,这时仪表数值可能是正值也可能是负值;当仪表零点在正负几百公斤之间乱漂时,主要是因为传感器损坏、电磁波干扰和仪表电压不稳、将模拟信号转换成数字信号时有误所造成的。
五、具体措施1、机械方面:将轨道衡秤体四周堆积物清理干净;将各限位拉杆调整至用手可以晃动的位置,再用备螺母紧住;将过度块螺母调整至可以晃动并且过渡块与铁轨有3mm 间隙的位置为佳。
2、电器方面:检查所有传感器的阻抗、电压是否正常;仪表电压、信号是否受电磁波干扰;接线盒是否有通道损坏或电容等零配件损坏。
正确接线,排除问题。
3、尽量停止旁边大型机械运动,环境温度应在电器允许范围内,没有大风及雨、雪等环境因素干扰。
五、总结当发现零漂问题后,需要具体问题具体分析,逐一检查,排除各方面可能造成这一现象的因素,最终找到解决问题的方案。
轨道衡衡重报告引言:轨道衡作为一种重要的称重设备,被广泛应用于物流、工业生产等领域。
在使用轨道衡进行衡重时,准确的测量结果对保证产品质量和生产效率至关重要。
本报告将介绍轨道衡衡重的原理、方法以及衡重过程中可能出现的问题及解决方案,以帮助读者更好地了解和使用轨道衡。
一、轨道衡衡重原理轨道衡的衡重原理基于牛顿第二定律,即F=ma。
当物体通过轨道衡时,轨道衡会测量物体所受到的力,再根据力与加速度的关系计算其质量。
轨道衡通常由传感器、数据采集系统和计算设备组成,通过测量传感器受到的力并进行数据处理,最终得到物体的质量。
二、轨道衡衡重方法1. 静态衡重法:静态衡重法是最常用的轨道衡衡重方法之一。
在衡重过程中,物体静止在轨道衡上,通过测量传感器受到的力来计算物体的质量。
这种方法适用于衡重物体较小或衡重精度要求不高的情况。
2. 动态衡重法:动态衡重法是一种通过物体在轨道上运动来进行衡重的方法。
在衡重过程中,物体以一定速度通过轨道衡,通过测量传感器受到的力和运动速度,计算物体的质量。
相比静态衡重法,动态衡重法可以提高衡重效率和准确度。
三、轨道衡衡重的注意事项1. 环境影响:轨道衡的衡重精度受到环境因素的影响,如温度、湿度、振动等。
在进行衡重之前,应确保环境稳定,避免因环境变化导致测量误差。
2. 安装位置:轨道衡的安装位置也会对衡重结果产生影响。
应选择平整、稳固的地面进行安装,并保证轨道衡与地面接触良好,避免因不平衡或松动导致衡重结果不准确。
3. 校准和维护:轨道衡在使用前需要进行校准,以保证测量结果的准确性。
定期进行维护和校准,修复或更换可能存在的故障部件,以确保轨道衡的正常运行。
四、轨道衡衡重常见问题及解决方案1. 衡重结果异常:如果衡重结果明显偏离预期值,可能是由于传感器故障、数据采集系统错误或设备损坏等原因引起的。
此时,应及时检查设备、传感器和数据采集系统,并根据需要修复或更换故障部件。
2. 环境干扰:环境因素如电磁干扰、温度变化等可能影响轨道衡的测量结果。
浅析静态电子汽车衡检定中注意问题摘要:静态电子汽车衡作为大量值称量的基础性计量器具,对工业和贸易等重要领域发挥着举足轻重的作用。
目前静态电子汽车衡的检定中存在诸多问题,必须进行针对性的建议改进。
关键词:静态电子汽车衡计量检定工业计量引言静态电子汽车衡是一种电子控制的、静止状态下自动识别的大型称重仪器, 广泛应用于公路、煤炭、冶金、电力、港口、仓储等关系国民经济发展的重大行业,以满足相关方进行贸易、运输、储存等的快速精确计量称重需要[1]。
近年来,尤其伴随物流产业的迅速发展,以静态电子汽车衡为主的计量称重设备在全国爆发式的增长,从城市到农村,从工厂到集贸市场,都广泛存在静态电子汽车衡的身影。
应该说,静态电子汽车衡的使用,为物联网的发展和市场经济的稳定,提供了重要的技术保障。
静态电子汽车衡检定的现状和存在问题静态电子汽车衡是相对于动态电子汽车衡和机械式汽车衡相区分的,它具有相对稳定性、便捷性、安全性、易操作性等特点,在重型计量器具称重中具有相当重要的地位,是重工业发展的基础性组成部分。
目前,全国的静态电子汽车衡预计在建使用十万余台件,为保证社会的量值统一、工业化全面发展发挥了重要的作用。
当前,对静态电子汽车衡的检定按照《JJG539-97》、《JJG539-2015》数字指示称规范,分别对分度值e=d,重复性,置零准确度等技术指标进行逐项检定,以及在实际操作中对超出砝码数量的“大量”部分利用“重车”进行替代检定其偏载。
总体来说,对于静态电子汽车衡的检定现今已较为成熟,检定结果的准确性和标定的可控性也较为精确。
但是也必须看到,静态电子汽车衡是使用和检定中也存在着一些“致命”问题,直接影响其使用的准确性和公正性。
首先,近年来多数企业为了降低成本损失,主动要求生产厂家在安装调试过程中降低分度值e,以期达到提高精度,最大化节约成本的目的,但这种做法却容易影响到静态电子汽车衡的稳定性,造成检定中的分度值e与Δm的变动,进而影响整个检定的结果;第二,多数静态电子汽车衡使用单位常常“大量小用”,如在实际中Max称量=100吨的静态电子汽车衡,日常往往称量不超过50吨,常年的无大量压重使用直接造成了电子传感灵敏性降低,使在60-100吨范围内计量传感长期缺失,检定中大量值易不准确,出现超最大允许误差的现象;第三,使用单位过于追求便捷性,将钢梁与混凝土路面、电脑显示房与地磅空间距离过近,易造成检定中人员安全和称量的人为误差,对整个检定工作产生隐患[2]。
浅谈静态电子轨道衡的相关问题摘要:本文介绍了静态电子轨道衡的工作原理,从常见的一些故障分析入手,给予了相关的处理方法,并对日常的维护工作做了简要说明。
关键词: 静态电子轨道衡; 故障分析; 偏载;
1电子轨道衡简介
电子轨道衡指设置在铁道线路上, 用以称量铁路车辆装载的散装货物的大型电子衡器。
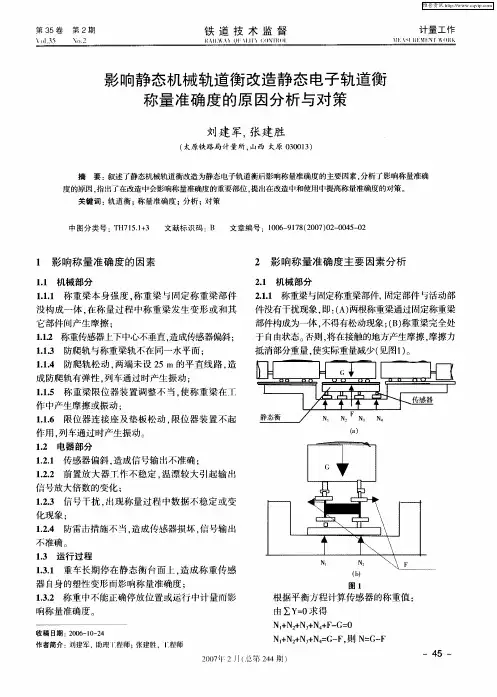
主要由承重机构 ( 称量轨、台面、主梁等) 、仪表、传感器、接线盒、打印机、稳压电源等。
其工作原理为:lc 受力, 弹性体在外力作用下产生形变, 使粘贴在其表面的电阻应变片 ( 计) 也发生形变; 电阻应变片变形后, 其阻值将发生变化, 平衡电阻被打破,测量电路把电阻变化转变为电信号输出, 经接线盒送入仪表。
在仪表内部经放大、滤波、 a/d转换, 最后由 cpu进行处理, 显示在屏幕上。
如图1:
图1
2静态电子轨道衡的相关故障分析
2.1传感器故障
( 1)检查步骤:测量输入、输出阻抗。
将传感器依次从接线盒内接线排脱离, 分别测量输入阻抗、输出阻抗。
如柱式传感器输入阻抗一般在 351 ω, 输出阻抗一般在 350 ω左右。
原因分析:a输入、输出阻抗均为断路,是由于传感器电缆线折断或传感器应变片烧毁造成的;b输入、输出阻抗不稳定, 可能是
信号线绝缘层破裂, 绝缘性能下降, 或传感器受潮等原因导致桥路同弹性体绝缘不良造成的。
( 2) 检查步骤:依次将某只传感器输出端从接线盒接线排端子上拆下, 打开仪表电源, 用数字万用表测传感器输出端电压信号, 在空秤情况下, 该电压一般在 0.2~ 2 mv 之间。
原因分析:检测结果远远大于上述范围, 说明传感器零点输出较大, 可能是传感器弹性体因过载产生永久塑性变形。
( 3) 检查步骤:测量传感器加载状态输出信号。
按上述方法测量传感器空秤时输出信号, 先记录传感器输出信号 u0, 再在秤体传感器上方加载一适当载荷,测量其输出信号值的变化, 设单只传感器额定载荷为 l, 实际加载到传感器上方载荷的力为 f, 如果仪表供电电压为 ix:12v, 则此时测量该只传感器输出端信
号电压值 u:12× 2xf/l(mv),
原因分析:如果测量值约等于 u+u0, 则说明传感器无故障; 若测量值约等于 u,则该传感器可能因应变片受潮引起的故障。
2.2电子轨道衡偏载问题
偏载是指同一载荷在不同位置的示值。
由于轨道衡在进行偏载检定时, 遇到的故障现象多种多样, 产生问题的原因也很多。
下面就对常见的两种故障现象举例进行分析。
1)偏载超差、稳定性好。
即偏载时可能是一点, 也可能是多点超差。
往复辗压最大、最小误差之间的差值没有超出检完规程要求的极限值。
检查步骤: 外观检查没有发现有与规程技术要求相违背的异常
现象, 空载正常, 偏载辗压 7 个点往返几次后发现有几个点超差, 但稳定性很好。
此衡分度值 ( 1d=20kg ) , 最大误差 100kg, 最
小误差 0kg。
先确定空载零点后, 逐点 ( lc 位置) 加偏载, 根据加载点 lc 的输出信号比其它点的输出信号大的特点, 用数字万
用表 mv档分别测试记录各点的输出信号, 找出相对应的 lc, 以
此类推。
lc的位置确定后, 根据对应的故障点, 调节故障 lc 的电位器, 改变其输出信号。
也可以采用查 lc的信号线的方法来定位。
原因分析:故障 lc 的输出特性曲线局部变形, 导致输出信号
异常, 使得显示仪表显示出的数值超差。
处理方法: 用数字万用表分别测试出各 lc加载时的输出信号
和其它点的输出信号进行对比、确定故障 lc的位置, 调节电位器排除故障。
2)第二种偏载超差, 稳定性不好。
即偏载压点时超差, 往复辗压后最大、最小误差之间的差值。
超出了规程要求的极限值。
检查步骤: 根据压偏载情况, 确定故障部位, 调整相对应部位
的电位器, 改变输出信号。
经查发现两个故障点的 lc传力钢球和
上球碗存在接触不实的现象, 偏载后复回位不好。
原因分析:发生变量的两个点集中在轨道衡的一端。
因 lc垫
的不实, 加上长期使用, 导致了主梁局部变形。
检衡车往返辗压, lc传力钢球回位不好引起变量。
量值超差是 lc的输出特性曲线局部变形所致。
处理方法:给不实的 lc加垫片, 解决变量问题,调整正常点的
lc电位器使 7 个点输出接近一致, 校准仪表解决问题, 使得误差控制在要求的范围内。
3静态电子轨道衡的日常维护
3.1 机械部分
( 1) 定期对秤台进行检查, 及时清除秤台与周围水泥基础之间卡入的异物, 以免其对称量造成影响。
承重台面四周应保持 5~15 mm间隙。
( 2) 定期对过度器进行检查。
固定端要牢固可靠, 但又不能影响其灵活性。
不能有卡的现象; 过度器的最高点要高于防爬轨和称量轨 0.5~1 mm。
要注意防爬轨与称量轨的间隙及高差与错牙。
防爬轨与称量轨的间隙要保持在 5~15 mm之间; 防爬轨与称量轨的高差与错牙要≤2 mm。
同时检查称量轨是否有窜动。
( 3) 定期对限位器进行检查调整, 对相关部位进行加油保养。
定期对其销轴转动部位加油并清扫,保证其转动灵活。
因为如果其转动部位不定期进行清扫加油, 随着时间的推移, 转动部位易因
锈蚀或异物的进入而变得卡、涩转动不灵活, 从而影响称量精度。
限位装置要处于水平状态。
( 4) 定期对传感器系统、承重梁、防爬轨和称量轨进行检查,保证零部件和系统完整无损伤
3.2 电气、仪表部分
( 1) 定期检查传感器接线盒及接线端子。
确保接线端子连接可
靠, 端子不氧化。
对其进行定期清扫, 以免积灰短路。
( 2) 定期检查信号电缆外观绝缘层是否有破损、信号电缆是否有折断等现象。
如发现问题要及时更换。
( 3) 定期对 ups电源及其电池组进行检查。
确保电池组接线端子接线牢靠, 无锈蚀松动现象。
( 4) 仪表长期不用时(如 1 个月以上), 应根据环境经常通电检查, 以免受潮或其他不良气体的侵蚀。
5 结语
由于轨道衡计量准确、读数直观、速度快、结构简单、维护方便、能自动打印而被广泛应用。
但由于本身质量和使用等很多方面的因素造成了测量上的一些误差。
只有在操作上规范化、检测上合理化、维护上仔细化,才能保证使其更好的为人类服务,保证测量的准确性。
注:文章内所有公式及图表请用pdf形式查看。