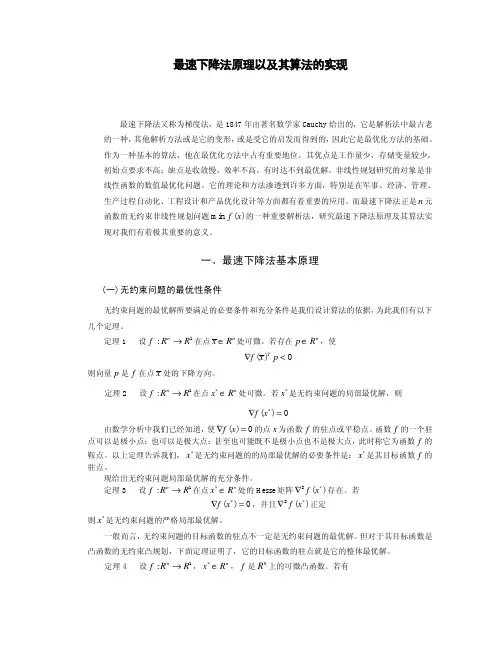
最优化算法实验3-最速下降法
- 格式:doc
- 大小:29.50 KB
- 文档页数:2
最优化方法及其Matlab程序设计习题作业暨实验报告学院:数学与信息科学学院班级:12级信计一班姓名:李明学号:1201214049第三章 最速下降法和牛顿法一、上机问题与求解过程1、用最速下降法求212221216423),(x x x x x x f --+=的极小值。
解:仿照书上编写最速下降法程序如下:function [x,val,k]=grad(fun,gfun,x0) %功能:用最速下降法求解无约束化问题:min f(x) %输入:x0是初始点,fun,gfun 分别是目标函数和梯度 %输出:x,val 分别是近似嘴有点和最优值,k 是迭代次数 maxk=5000;rho=0.5;sigma=0.4;%一开始选择时选择的rho 和sibma 选择的数据不够合理,此处我参照书上的数据编写数据 k=0;epsilon=1e-5; while (k<maxk)g=feval(gfun,x0); %计算梯度 d=-g;%计算搜索方向if (norm(d)<epsilon),break ;end m=0;mk=0; while (m<20)%Armijo 搜索if (feval(fun,x0+rho^m*d)<feval(fun,x0)+sigma*rho^m*g'*d) mk=m;break ;%直接利用Armijo 搜索公式,一开始的时候没有记住公式编写出现错误 end m=m+1; endx0=x0+rho^mk*d; k=k+1; end x=x0;val=feval(fun,x0) %求得每一个的函数值然后仿照书上建立两个目标函数和梯度的M 文件:function f=fun(x)f=3*x(1)^2+2*x(2)^2-4*x(1)-6*x(2); function g=gfun(x) g=[6*x(1)-4,4*x(2)-6]';选取初始点为']0,0[,调用函数程序,得出最小极值点为']500.1,6667.0[,极小值为8333.5-,在界面框中输入的程序如下:[x,val,k]=grad('fun','gfun',x0) val = -5.8333 x =0.6667 1.5000 val =-5.8333 k = 10从结果可以看出迭代次数为10次,如果选取不同的初值点则迭代次数不一样,但是极小值相同。
最优化方法实验报告Numerical Linear Algebra And ItsApplications学生所在学院:理学院学生所在班级:计算数学10-1学生姓名:甘纯指导教师:单锐教务处2013年5月实验三实验名称:无约束最优化方法的MATLAB实现实验时间: 2013年05月10日星期三实验成绩:一、实验目的:通过本次实验的学习,进一步熟悉掌握使用MATLAB软件,并能利用该软件进行无约束最优化方法的计算。
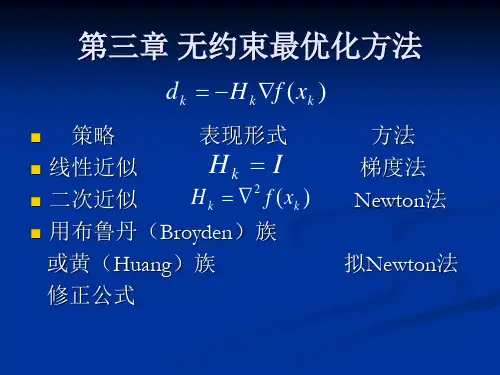
二、实验背景:(一)最速下降法1、算法原理最速下降法的搜索方向是目标函数的负梯度方向,最速下降法从目标函数的负梯度方向一直前进,直到到达目标函数的最低点。
2、算法步骤用最速下降法求无约束问题n R()min的算法步骤如下:xxf,a )给定初始点)0(x ,精度0>ε,并令k=0;b )计算搜索方向)()()(k k x f v -∇=,其中)()(k x f ∇表示函数)(x f 在点)(k x 处的梯度;c )若ε≤)(k v ,则停止计算;否则,从)(k x 出发,沿)(k v 进行一维搜索,即求k λ,使得)(min )()()(0)()(k k k k v x f v x f λλλ+=+≥; d )令1,)()()1(+=+=+k k v x x k k k k λ,转b )。
(二)牛顿法1、算法原理牛顿法是基于多元函数的泰勒展开而来的,它将)()]([-)(1)(2k k x f x f ∇∇-作为搜索方向,因此它的迭代公式可直接写出来:)()]([)(1)(2)()(k k k k x f x f x x ∇∇-=-2、算法步骤用牛顿法求无约束问题n R x x f ∈),(min 的算法步骤如下:a )给定初始点)0(x ,精度0>ε,并令k=0;b )若ε≤∇)()(k x f ,停止,极小点为)(k x ,否则转c );c )计算)()]([,)]([)(1)(2)(1)(2k k k k x f x f p x f ∇∇-=∇--令;d )令1,)()()1(+=+=+k k p x x k k k ,转b )。
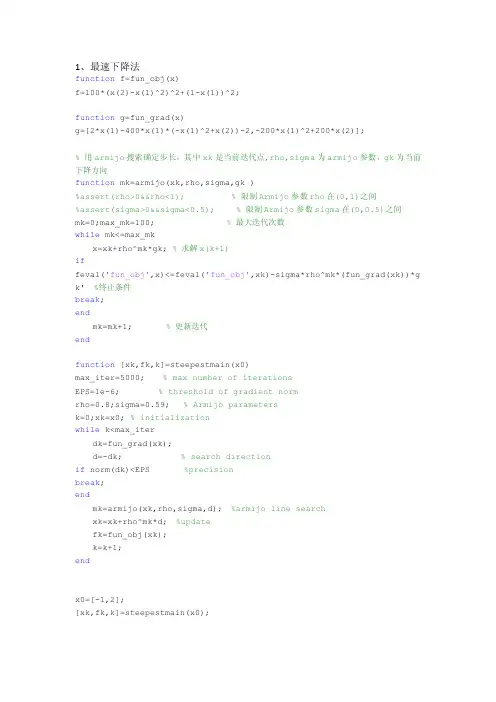
1、最速下降法function f=fun_obj(x)f=100*(x(2)-x(1)^2)^2+(1-x(1))^2;function g=fun_grad(x)g=[2*x(1)-400*x(1)*(-x(1)^2+x(2))-2,-200*x(1)^2+200*x(2)];% 用armijo搜索确定步长,其中xk是当前迭代点,rho,sigma为armijo参数,gk为当前下降方向function mk=armijo(xk,rho,sigma,gk )%assert(rho>0&&rho<1); % 限制Armijo参数rho在(0,1)之间%assert(sigma>0&&sigma<0.5); % 限制Armijo参数sigma在(0,0.5)之间mk=0;max_mk=100; % 最大迭代次数while mk<=max_mkx=xk+rho^mk*gk; % 求解x(k+1)iffeval('fun_obj',x)<=feval('fun_obj',xk)-sigma*rho^mk*(fun_grad(xk))*g k' %终止条件break;endmk=mk+1; % 更新迭代endfunction [xk,fk,k]=steepestmain(x0)max_iter=5000; % max number of iterationsEPS=1e-6; % threshold of gradient normrho=0.8;sigma=0.59; % Armijo parametersk=0;xk=x0; % initializationwhile k<max_iterdk=fun_grad(xk);d=-dk; % search directionif norm(dk)<EPS %precisionbreak;endmk=armijo(xk,rho,sigma,d); %armijo line searchxk=xk+rho^mk*d; %updatefk=fun_obj(xk);k=k+1;endx0=[-1,2];[xk,fk,k]=steepestmain(x0);2、Newton法function f=fun_obj(x)f=100*(x(2)-x(1)^2)^2+(1-x(1))^2;function g=fun_grad(x)g=[2*x(1)-400*x(1)*(-x(1)^2+x(2))-2,-200*x(1)^2+200*x(2)];function He=Hess(x)He=[1200*x(1)^2-400*x(2)+2,-400*x(1);-400*x(1),200];% 用armijo搜索确定步长,其中xk是当前迭代点,rho,sigma为armijo参数,gk为当前下降方向function mk=armijo(xk,rho,sigma,gk )%assert(rho>0&&rho<1); % 限制Armijo参数rho在(0,1)之间%assert(sigma>0&&sigma<0.5); % 限制Armijo参数sigma在(0,0.5)之间mk=0;max_mk=100; % 最大迭代次数while mk<=max_mkx=xk+rho^mk*gk; % 求解x(k+1)iffeval('fun_obj',x)<=feval('fun_obj',xk)-sigma*rho^mk*(fun_grad(xk))*g k' %终止条件break;endmk=mk+1; % 更新迭代endfunction [xk,fk,k]=Newtonmain(x0)max_iter=5000; % 最大迭代次数EPS=1e-6; % 精度rho=1;sigma=1e-4; % Armijo 参数k=0;xk=x0; % 初值while k<max_iter % 迭代次数超过最大迭代次数时跳出循环k=k+1;dk=fun_grad(xk); % x(k)处的梯度H=Hess(xk); % x(k)处的Hessian矩阵d=-H\dk'; % x(k)处的搜索方向if norm(dk)<EPS % 终止条件break;endmk=armijo(xk,rho,sigma,d'); % 利用armijo搜索确定步长xk=xk+rho^mk*d'; % 计算x(k+1)的值fk=fun_obj(xk); % 计算x(k+1)处函数的值endx0=[1.2,1.2];[xk,fk,k]=Newtonmain(x0);3、Newton-最速下降法function f=fun_obj(x)f=100*(x(2)-x(1)^2)^2+(1-x(1))^2;function g=fun_grad(x)g=[2*x(1)-400*x(1)*(-x(1)^2+x(2))-2,-200*x(1)^2+200*x(2)];function He=Hess(x)He=[1200*x(1)^2-400*x(2)+2,-400*x(1);-400*x(1),200];% 用armijo搜索确定步长,其中xk是当前迭代点,rho,sigma为armijo参数,gk为当前下降方向function mk=armijo(xk,rho,sigma,gk )%assert(rho>0&&rho<1); % 限制Armijo参数rho在(0,1)之间%assert(sigma>0&&sigma<0.5); % 限制Armijo参数sigma在(0,0.5)之间mk=0;max_mk=100; % 最大迭代次数while mk<=max_mkx=xk+rho^mk*gk; % 求解x(k+1)iffeval('fun_obj',x)<=feval('fun_obj',xk)-sigma*rho^mk*(fun_grad(xk))*g k' %终止条件break;endmk=mk+1; % 更新迭代endfunction [xk,fk,k]=newton_steepest(x0)max_iter=5000; % 最大迭代次数EPS=1e-6; % 精度rho=1;sigma=1e-4; % Armijo 参数 rho=0.8;sigma=0.59;k=0;xk=x0; % 初值while(k<max_iter)k=k+1;dk=fun_grad(xk); % x(k)处的梯度,注意dk为行向量G=Hess(xk); % x(k)处的Hessian矩阵d=-G\dk'; % x(k)处的搜索方向,注意此时d为列向量if norm(dk)<EPS % x(k)处的搜索方向break;end%% 判断d是否为下降方向if d'*dk'<0 % 若d'*dk<0,则d为下降方向d=d;else% 若d'*dk>=0,则d不为下降方向,令下降方向为负梯度方向 d=-dk';endmk=armijo(xk,rho,sigma,d'); % 利用armijo搜索确定步长 xk=xk+rho^mk*d'; % 计算x(k+1)的值fk=fun_obj(xk); % 计算x(k+1)处函数的值endx0=rand(1,2000);[xk,fk,k]=newton_steepest(x0);。
最速下降法Matlab实现实验目的:1.掌握迭代法求解无约束最优化问题的基本思想2.通过实验掌握最速下降法的Matlab算法的基本步骤实验内容:1.迭代法求解无约束最优化问题的基本思想给定一个初始点x(0), 按照某一迭代规则产生一个迭代序列{x(k)}. 使得若该序列是有限的, 则最后一个点就是原问题的极小点; 否则, 若序列{x(k)} 是无穷点列时, 它有极限点且这个极限点即为原问题的极小点.设x(k) 为第k 次迭代点, d(k) 为第k 次搜索方向, a(k)为第k 次步长因子, 则第k 次迭代完成后可得到新一轮(第k + 1 次) 的迭代点x(k+1) = x(k) + a(k) d(k).2.无约束优化问题迭代算法的一般框架步0 给定初始化参数及初始迭代点x(0). 置k := 0.步1 若x(k) 满足某种终止准则, 停止迭代, 以x(k) 作为近似极小点.步2 通过求解x(k) 处的某个子问题确定下降方向d(k).步3 通过某种搜索方式确定步长因子a(k), 使得f(x(k) + a(k) d(k)) < f(x(k)).步4 令x(k+1) := x(k) + a(k) d(k), k := k + 1, 转步1.3. 最速下降法的基本步骤步0 选取初始点x(0) ∈R^n, 容许误差0 ≤e ≪1. 令k := 1.步1 计算g(k) = ∇f(x(k)). 若‖g(k)‖≤e, 停算, 输出x(k)作为近似最优解.步2 取方向d(k)= −g(k).步3 由线搜索技术确定步长因子a(k),即min f(a(k))=f(x(k)+a(k)d(k)).步4 令x(k+1) := x(k) + a(k)d(k)), k := k + 1, 转步1.4. 编写最速下降法Matlab 程序5. 利用程序求解无约束最优化问题f(x,y)=x^2+2y^2的最优值.。

上机报告一.最速下降法算法简述:1.在本例中,先将最速下降方向变量赋一个值,使其二范数满足大于ε的迭代条件,进入循环。
2.将函数的一阶导数化简,存在一个矩阵,将其hesse矩阵存在另一个矩阵。
依照公式求出α,进而求出下一任迭代的矩阵初值。
循环内设置一个计数功能的变量,统计迭代次数。
3.求其方向导数的二范数,进行判别,若小于ε,则跳出循环,否则将继续迭代。
4.显示最优解,终止条件,最小函数值。
心得体会:最速下降法的精髓,无疑是求梯度,然后利用梯度和hesse矩阵综合计算,求解下一个当前最优解。
但是,要求函数是严格的凸函数,结合严格凸函数的大致图像,这就给初值的选取提供了一点参考。
例如在本例中,由于含有两个变量的二次方之和,结合大致图像,想当然的,初值的选取应当在原点附近;又因为变量的二次方之和后面,还减去了变量的一次形式和一次混合积,所以初值的选取应该再向第一象限倾斜。
综合以上考量,第一次选取(1,1)作为初值,判别精度方面,取到千分位,暂定为0.001。
运行以后,结果显示迭代了25次,最优解为(3.9995,1.9996),终止条件为5.4592e-04,目标函数为-8.0000。
这个结果已经相当接近笔算结果。
整体的运行也比较流畅,运算速度也比较快。
第二次取值,决定保留判别精度不变,将初值再适当向第一象限倾斜,取(2,2)作为初值,运行后,显示只迭代了11次!最优结果显示(3.9996,1.9997),终止条件为3.6204e-04,最优解-8.0000。
可见,最优结果更接近理想值,终止条件也变小了,最关键的是,迭代次数减少至第一次的一半以下!这说明以上初选取的方向是对的!第三次再进行初值细化,判别精度仍然不变,初值取(3,3)。
结果令人兴奋,只迭代了四次!最优解已经显示为(4.0000,2.0000),终止条件为2.4952e-04,目标函数-8.0000。
第四次,判别精度不变,取初值(4,4)。
最优化Armijo算法确定步长的最速下降法资料最速下降法是最优化算法中最简单、最基础的一种方法,但其收敛速度较慢且容易陷入局部最优解。
因此,在最速下降法的基础上,可以通过引入步长的方法来提高算法的收敛速度。
而Armijo算法就是一种常见的用于确定步长的方法。
最速下降法基础假设我们要最小化目标函数f(x),那么最速下降法的思路就是从一个初始点x0开始,不断朝着负梯度方向进行迭代,直到找到最优解x∗,即:$x_{k+1} = x_k - \\alpha_k \ abla f(x_k)$其中,ablaf(x k)是f(x)在x k处的梯度,$\\alpha_k$ 是步长(也称为学习率),表示每次迭代的步长大小。
但这里还有一个问题:如何确定每次迭代的步长呢?Armijo算法Armijo算法是一种基于梯度下降法的步长确定方法。
它的思路是,每次迭代的步长不应该过大,否则容易导致超出收敛区域。
同时,步长也不应该过小,否则收敛速度会变得非常缓慢。
因此,步长的大小应该恰到好处,即在一定范围内找到一个最优的步长大小。
具体地,Armijo算法通过二分搜索的方法,在可行步长范围内找到一个最优的步长 $\\alpha_k$。
具体过程如下:1.首先初始化 $\\alpha_0$,并设定一些参数,如尝试步长大小t、可行步长下界 $\\tau$ 和函数下降的最小比例 $\\gamma$。
2.计算目标函数f(x k−t ablaf(x k)),以及根据一定准则确定下一个$\\alpha$。
3.如果 $f(x_k - \\alpha_k\ abla f(x_k))$ 函数值比f(x k)减小了一些比例$\\gamma$,则认为当前 $\\alpha_k$ 是可行的步长。
4.如果当前 $\\alpha_k$ 不是可行的步长,则将其折半,即 $\\alpha_k\\leftarrow \\alpha_k/2$,直到找到一个可行的步长为止。
最速下降法原理及其算法实现最速下降法(Gradient Descent)是一种常用的优化算法,用于寻找函数的最小值。
它是一种迭代的方法,每次迭代都沿着负梯度方向更新参数,以减小目标函数的值。
在本文中,我们将介绍最速下降法的原理和算法实现。
1.最速下降法原理假设有一个目标函数f(x),其中x是一个向量。
我们的目标是找到使得f(x)最小的x。
最速下降法的思想是从任意初始点x0开始迭代,按照梯度方向更新参数,直到达到最优解。
具体地,设f(x)的梯度为g(x),即g(x)=∇f(x)。
最速下降法的迭代公式为:x(n+1)=x(n)-α*g(x(n))其中,x(n)表示第n次迭代的参数向量,α是迭代步长,也称为学习率。
每次迭代时,我们沿着梯度方向更新参数,α控制更新的步长。
我们期望通过不断迭代,逐渐逼近最优解。
2.最速下降法算法实现步骤1:初始化参数。
选择初始点x(0),设定学习率α,设定最大迭代次数。
步骤2:迭代过程。
重复以下步骤,直到达到最大迭代次数或满足收敛条件:a)计算梯度g(x(n))=∇f(x(n))。
b)更新参数。
根据迭代公式进行更新,x(n+1)=x(n)-α*g(x(n))。
c)判断终止条件。
比较f(x(n+1))和f(x(n))的差异,如果差异小于一定阈值,停止迭代。
步骤3:输出结果。
输出最优参数x*,即使得f(x)最小的参数。
需要注意的是,在实际应用中,我们可能需要进行一些改进来提高最速下降法的性能。
例如,可以使用线来自适应地选择学习率以保证每次更新获得合理的进展。
此外,为了加快收敛速度,可以使用加速算法,如动量法、Nesterov 加速梯度法等。
3.总结。
最速下降法Matlab实现
实验目的:
1.掌握迭代法求解无约束最优化问题的基本思想
2.通过实验掌握最速下降法的Matlab算法的基本步骤
实验内容:
1.迭代法求解无约束最优化问题的基本思想
给定一个初始点x(0), 按照某一迭代规则产生一个迭代序列{x(k)}. 使得若该序列是有限的, 则最后一个点就是原问题的极小点; 否则, 若序列{x(k)} 是无穷点列时, 它有极限点且这个极限点即为原问题的极小点.
设x(k) 为第k 次迭代点, d(k) 为第k 次搜索方向, a(k)为第k 次步长因子, 则第k 次迭代完成后可得到新一轮(第k + 1 次) 的迭代点
x(k+1) = x(k) + a(k) d(k).
2.无约束优化问题迭代算法的一般框架
步0 给定初始化参数及初始迭代点x(0). 置k := 0.
步1 若x(k) 满足某种终止准则, 停止迭代, 以x(k) 作为近似极小点.
步2 通过求解x(k) 处的某个子问题确定下降方向d(k).
步3 通过某种搜索方式确定步长因子a(k), 使得f(x(k) + a(k) d(k)) < f(x(k)).
步4 令x(k+1) := x(k) + a(k) d(k), k := k + 1, 转步1.
3. 最速下降法的基本步骤
步0 选取初始点x(0) ∈R^n, 容许误差0 ≤e ≪1. 令k := 1.
步1 计算g(k) = ∇f(x(k)). 若‖g(k)‖≤e, 停算, 输出x(k)作为近似最优解.
步2 取方向d(k)= −g(k).
步3 由线搜索技术确定步长因子a(k),即
min f(a(k))=f(x(k)+a(k)d(k)).
步4 令x(k+1) := x(k) + a(k)d(k)), k := k + 1, 转步1.
4. 编写最速下降法Matlab 程序
5. 利用程序求解无约束最优化问题f(x,y)=x^2+2y^2的最优值.。