最速下降法原理及例题实例
- 格式:pdf
- 大小:134.91 KB
- 文档页数:10
最速下降法原理嘿,朋友们!今天咱来聊聊最速下降法原理。
这玩意儿啊,就好比你在一个大山里找下山的最快路。
想象一下,你站在山顶,周围都是迷雾,你不知道哪条路是最快能到山底的。
那咋办呢?最速下降法就来帮忙啦!它就像是你手里的指南针,给你指引一个大致的方向。
你就沿着这个方向先走一小步,然后看看,哎呀,是不是离山底更近了点呢?如果是,那就好,接着再沿着这个方向走一小步。
可要是发现好像不太对,那就稍微调整一下方向。
这就好像你走路,有时候会走偏一点,那你就得赶紧调整回来,不然不就越走越远啦?最速下降法就是这么神奇,让你不断地靠近目标。
你说这像不像我们平时做事啊?我们一开始也不知道怎么做才是最好的,那就先试着来嘛!走一步看一步,发现不对就赶紧调整。
比如说你想学会一门乐器,一开始可能弹得乱七八糟的,但是你每次都发现问题,然后改正,慢慢地不就越来越好了嘛!这和最速下降法是一个道理呀!而且哦,这个过程中可不能着急。
就像下山一样,你要是急急忙忙地乱跑,说不定就摔跟头啦!得稳稳地,一步一步来。
最速下降法也不是一下子就能让你找到最好的路,它只是给你一个指引。
有时候可能会走一些弯路,但没关系呀,这都是过程嘛!你想想,要是一下子就找到了最好的路,那多没意思呀,一点挑战都没有。
就是因为有这些曲折,我们才会更加珍惜最后到达目的地的那一刻呀!我们的生活不也是这样嘛?总是会遇到各种各样的问题,但只要我们有最速下降法这样的精神,不断地去尝试,去调整,就一定能找到属于我们自己的路,走向成功的彼岸。
所以啊,别害怕困难,别害怕走弯路,就大胆地去尝试吧!让最速下降法带着我们在生活的大山里找到下山的最快路径!相信自己,一定可以的!。
梯度法(又名,最速下降法)(该法总可以收敛,但是,在接近真解时收敛的速度会放慢。
) 梯度法又称为最速下降法,用于求解实系数非线性方程组12(,,,)0,1,2,,i n f x x x i n== (7-15)的一组根。
梯度法首先是定义一个目标函数212121(,,,)(,,,)nn i n i x x x f x x x =Φ=∑(7-16)使目标函数21nii f =Φ=∑达到最小的12,,,n x x x 是我们寻找的一组解,这是非线性最小二乘法问题。
如果第(0,1,2,)k k = 步求得一组解12,,,nk k k x x x ,使得12(,,,)n k k kx x x εΦ< (7-17)则认为12,,,nk k k x x x 是原方程组满足一定精度的()ε要求的一组解。
梯度法的计算过程是:(1)先给定一组不全为零的初值12000,,,nx x x ,第k 步的一组根为12,,,nk k kx x x ;(2)计算目标函数12(,,,)nk k k x x x Φ 的值;(单独子程序:fn =TargetFunction)(3)若12(,,,)nk k k x x x εΦ< ,则认为12,,,nk k k x x x 是满足一定精度()ε的一组解,否则,作如下修正计算1α+=∂Φ=-∂iki ik k ki ix x x x x (7-18)其中121212*********1111222(,,,)(,,,)(,,,)(,,,)(,,,)(,,,)(,,,)*,1,2,,α==⎫Φ=⎪⎛⎫⎪∂Φ ⎪ ⎪∂⎝⎭Φ+-Φ∂Φ=∂⎬Φ+-Φ∂Φ=∂Φ+-Φ∂Φ=∂==∑ n kj jn n n n n n k k kkn j j x x k k k k k kk k k k k k k k k k k kn n nki i x x x x x h x x x x x x h x x h x x x x x h x x x h x x x x h h H x i n ⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭(7-19)H 为控制收敛的常数,通常选为(10-5~10-6),收敛精度ε选为(10-6~10-8)。
第四章 无约束优化方法——最速下降法,牛顿型方法概述在求解目标函数的极小值的过程中,若对设计变量的取值范围不加限制,则称这种最优化问题为无约束优化问题。
尽管对于机械的优化设计问题,多数是有约束的,无约束最优化方法仍然是最优化设计的基本组成部分。
因为约束最优化问题可以通过对约束条件的处理,转化为无约束最优化问题来求解。
为什么要研究无约束优化问题?(1)有些实际问题,其数学模型本身就是一个无约束优化问题。
(2)通过熟悉它的解法可以为研究约束优化问题打下良好的基础。
(3)约束优化问题的求解可以通过一系列无约束优化方法来达到。
所以无约束优化问题的解法是优化设计方法的基本组成部分,也是优化方法的基础。
根据构成搜索方向所使用的信息性质的不同,无约束优化方法可以分为两类。
一:间接法——要使用导数的无约束优化方法,如梯度法、(阻尼)牛顿法、变尺度法、共轭梯度法等。
二:直接法——只利用目标函数值的无约束优化问题,如坐标轮换法、鲍威尔法单纯形法等。
无约束优化问题的一般形式可描述为:求n 维设计变量 []12Tn n X x x x R =∈使目标函数 ()min f X ⇒目前已研究出很多种无约束优化方法,它们的主要不同点在于构造搜索方向上的差别。
无约束优化问题的求解: 1、解析法可以利用无约束优化问题的极值条件求得。
即将求目标函数的极值问题变成求方程0)(min *=X f的解。
也就是求X*使其满足解上述方程组,求得驻点后,再根据极值点所需满足的充分条件来判定是否为极小值点。
但上式是一个含有n个未知量,n个方程的方程组,在实际问题中一般是非线性的,很难用解析法求解,要用数值计算的方法。
由第二章的讲述我们知道,优化问题的一般解法是数值迭代的方法。
因此,与其用数值方法求解非线性方程组,还不如用数值迭代的方法直接求解无约束极值问题。
2、数值方法数值迭代法的基本思想是从一个初始点)0(X出发,按照一个可行的搜索方向)0(d搜索,确定最佳的步长0α使函数值沿)0(d 方向下降最大,得到)1(X 点。
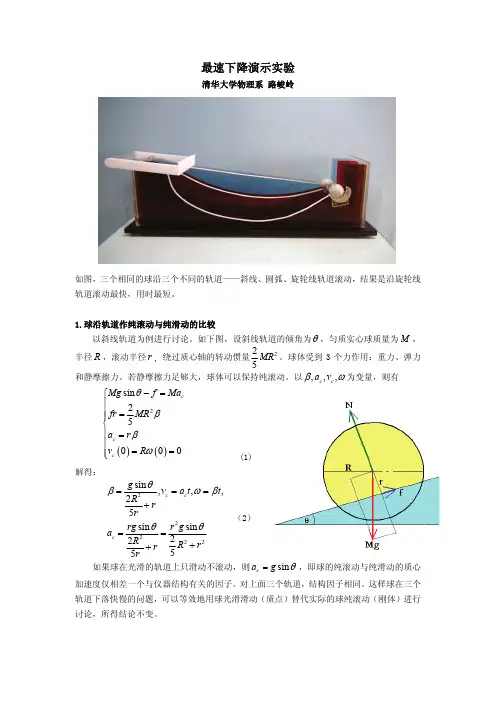
最速下降演示实验清华大学物理系 路峻岭如图,三个相同的球沿三个不同的轨道——斜线、圆弧、旋轮线轨道滚动,结果是沿旋轮线轨道滚动最快,用时最短。
1.球沿轨道作纯滚动与纯滑动的比较以斜线轨道为例进行讨论。
如下图,设斜线轨道的倾角为θ,匀质实心球质量为M ,半径R ,滚动半径r ,绕过质心轴的转动惯量225MR 。
球体受到3个力作用:重力、弹力和静摩擦力。
若静摩擦力足够大,球体可以保持纯滚动。
以,,,c c a v βω为变量,则有()()2sin 25000c c c Mg f Ma fr MR a r v R θββω−=⎧⎪⎪=⎪⎨⎪=⎪==⎪⎩ (1) 解得:22222sin ,,,25sin sin 2255c c c g v a t t R r r rg r g a R R r r rθβωβθθ===+==++ (2) 如果球在光滑的轨道上只滑动不滚动,则sin c a g θ=,即球的纯滚动与纯滑动的质心加速度仅相差一个与仪器结构有关的因子。
对上面三个轨道,结构因子相同。
这样球在三个轨道下落快慢的问题,可以等效地用球光滑滑动(质点)替代实际的球纯滚动(刚体)进行讨论,所得结论不变。
2.最速下降问题最速下降是个古老的问题,又称捷线问题。
有关泛函或变分法的书多采用此例引入相关概念。
其问题是:在空间高低两点之间寻找一条连接两点的光滑轨道,使质点沿轨道从高点下滑到低点用时最短。
如右图,过高低两点作一铅直平面,在此平面内建立直角坐标系。
以高点为原点,水平方向为x 轴,竖直向下为y 轴,设低点E的坐标为000(,)(0)x y y >。
现在的问题就是寻找过O 点和E 点的众多平面曲线()y y x =中使得质点下滑用时最少者。
设轨道()y y x =连续光滑,易得到质点由静止开始沿轨道由O 点到E 点所用时间为:()00x t y x =⎡⎤⎣⎦∫ (3)()t y x ⎡⎤⎣⎦表示t 是函数()y x 的函数,ds dy dx dx y =+=′+222)()(1为质点下落()y x 后的速度大小。