自动泊车辅助系统(可直接使用).pptx
- 格式:pptx
- 大小:4.30 MB
- 文档页数:27
自动泊车辅助系统(APAS)是一种新型的车辆辅助驾驶技术,它可以帮助驾驶员在紧凑的停车场或狭窄的停车位中轻松完成停车操作。
它的工作原理基于先进的传感器技术、实时数据处理和精确的车辆控制系统。
下面我将深入探讨自动泊车辅助系统的工作原理。
APAS依靠多种传感器来感知车辆周围的环境。
这些传感器通常包括超声波传感器、雷达传感器和摄像头。
超声波传感器可以探测车辆周围的障碍物,雷达传感器可以捕捉车辆周围的运动物体,而摄像头可以提供高清的实时影像,辅助系统分析周围环境。
APAS通过数据融合和实时处理来建立车辆周围环境的精确模型。
当传感器捕捉到周围环境的数据后,这些数据会被送入车辆的中央控制系统进行分析和处理。
控制系统会将不同传感器获取的数据相互融合,以获取更加全面和精确的环境信息,从而建立起车辆周围环境的三维模型。
APAS会利用建立的环境模型来规划车辆的行驶路径。
基于环境模型和停车位的信息,控制系统会计算出最佳的停车路径,并确定适当的车辆转向和速度控制策略。
通过精确的路径规划,系统可以确保车辆安全地驶入停车位,减少对周围障碍物的碰撞风险。
APAS通过精密的车辆控制系统来实现规划路径的执行。
一旦规划好停车路径,控制系统将发出指令控制车辆转向、加速和制动,实现车辆的自动泊车操作。
在整个泊车过程中,控制系统会不断更新环境模型,以确保车辆在变化的环境中能够做出及时的调整和反应。
当车辆成功完成泊车操作后,APAS会进行自动总结和回顾性的分析。
控制系统会对整个泊车过程进行回放,并对每个步骤的执行进行评估和总结,从而提供对泊车操作的反馈和改进建议。
自动泊车辅助系统的工作原理主要涉及传感器数据感知、环境模型建立、路径规划和车辆控制执行等多个环节。
这些环节的协同配合,使得车辆能够在复杂的停车场环境中安全、精准地完成泊车操作。
随着自动驾驶技术的不断发展,自动泊车辅助系统也将迎来更多的创新和进步,为驾驶员提供更加便利和安全的停车体验。
自动泊车系统摘要:现在城市发展迅速,汽车保有量快速增长,泊车环境日益复杂,所以自动泊车系统将成为汽车安全辅助系统之一。
自动泊车系统使用传感器实现自动定位,使用电动转向实现方向盘自动控制。
关键词:自动泊车,超声波传感器,电动转向一、引言:自动泊车系统是通过传感器系统和电动转向系统密切配合实现的。
合理的安装超声波传感器群组实现对车身周边环境自动感知,再通过方向盘进行电动转向控制,根据智能控制器的输出来实现车辆动作的自动控制,但是档位与刹车还是需要人为控制,现在还达不到全智能化。
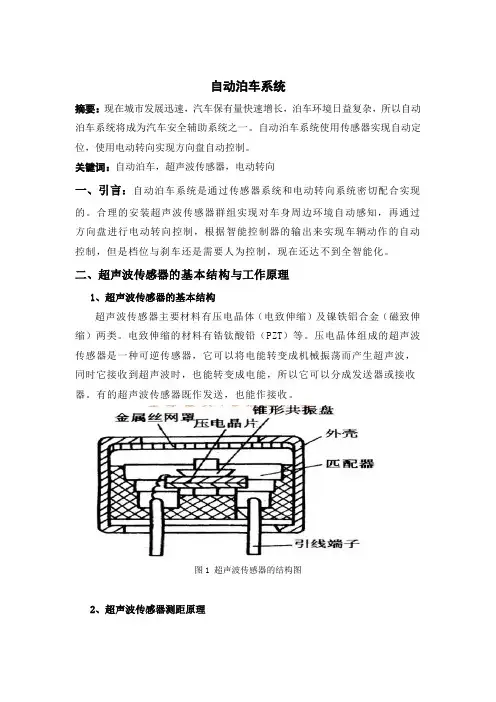
二、超声波传感器的基本结构与工作原理1、超声波传感器的基本结构超声波传感器主要材料有压电晶体(电致伸缩)及镍铁铝合金(磁致伸缩)两类。
电致伸缩的材料有锆钛酸铅(PZT)等。
压电晶体组成的超声波传感器是一种可逆传感器,它可以将电能转变成机械振荡而产生超声波,同时它接收到超声波时,也能转变成电能,所以它可以分成发送器或接收器。
有的超声波传感器既作发送,也能作接收。
图1 超声波传感器的结构图2、超声波传感器测距原理超声波传感器发出的超声波是一种传递信息的媒体,它与机械振动密切相关,可以由物体的撞击、运动所产生的机械振动以波的形式向外传播。
超声波的物理特性:(1)传播类似于光线,遵循几何光学的规律,速度与声波相同;(2)波长很短,方向性强:(3)能够产生窄脉冲:(4)功率大,超声波能够产生并传递强大的能量。
因为声波在介质中以纵波传播,所以当声波遇到尺寸大于他的波长时的目标物体阻挡时就会发生反射,而反射波就是我们通常称的回声。
回声在空气介质中传播的速度是已知的,通过测量声波从声源到达目标然后返回声源的时间,就可以计算出声波到目标的距离。
图2 超声波传感器工作原理图3、自动定位的实现原理由超声波的物理特性可以得出要实现准确的自动定位有效的测量出车辆周围环境信息,必须要多个传感器联合使用。
为实现平行泊车及泊车位的位置预测一共需要安装16个超声波传感器,车身两侧各需装6个,3个为一组,分别装在车身的前后部;车头车尾各安装2个。
从APA到AVP,四代泊车辅助系统技术剖析前言在汽车智能化的浪潮中,车载传感器发展迅速,越来越多搭载了先进传感器的汽车进入了我们的视野。
比如能够在高速公路上实现单车道巡航的凯迪拉克CT6,以及交通严重拥堵时解放驾驶员时间的奥迪A8,以及能够轻松实现高速公路自动驾驶、上下匝道的特斯拉Model系列的车型。
公众对自动驾驶的认识主要集中在高速、环路,解决的是“开车”的问题。
其实自动驾驶技术除了能开得一手好车外,还可以帮助解决新老司机都比较头痛的停车问题。
泊车辅助系统目前已经发展至第三代,从最开始的驾驶员必须在车内配合挂挡完成泊车,发展到驾驶员可以站在车外5米使用手机控制泊车,最后到汽车自己学习泊车路线,完成固定停车位或自家车库的泊车。
下面,我就来盘点一下已经成熟的这三代泊车辅助系统的传感器配置以及典型的应用场景,随后我会对将在一两年内量产的第四代泊车辅助系统做一个技术分析。
目前市面上已量产的泊车辅助系统主要有三类。
最早普及也是最为常见的第一代叫做APA自动泊车,随后出现的是将泊车与手机结合的第二代RPA远程遥控泊车,最后是最先进的第三代叫做自学习泊车。
在未来一到两年内将会出现更为先进的泊车解决方案——AVP代客泊车,也就是暂未量产的第四代泊车辅助系统。
泊车辅助一代:APA自动泊车APA(Auto Parking Asist)自动泊车是生活中最常见的泊车辅助系统。
泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位。
APA自动泊车所以依赖的传感器并不复杂,包括8个安装于汽车前、后的UPA 超声波雷达,也就是大家常说的“倒车雷达”,和4个安装于汽车两侧的APA超声波雷达,雷达的感知范围如下图所示。
APA超声波雷达的探测范围远而窄,常见APA最远探测距离为5米;UPA超声波雷达的探测范围近而宽,常见的UPA探测距离为3米。
不同的探测范围决定了他们不同的分工。
![自动泊车系统设计(朴昌浩[等]著)PPT模板](https://uimg.taocdn.com/3341236bc77da26924c5b05e.webp)


原理是:遍布车辆周围的雷达探头测量自身与周围物体之间的距离和角度,然后通过车载电脑计算出操作流程配合车速调整方向盘的转动,驾驶者只需要控制车速即可。
一般情况下自动泊车系统主要由两部分组成:控制单元和位于前后保险杠以及两侧的超声波雷达探头。
按动自动泊车辅助系统激活按钮之后,雷达探头可在车辆行驶时对车辆两侧进行扫描,低时速(一般为30km/h)及侧向距离1.5米左右之内均能成功完成车位扫描。
但基本上当车位旁出现树木,路灯杆等柱状物时,为避免雷达侦测出现误差而发生碰撞风险,此时系统将不被激活。
控制单元对雷达反馈的信息进行分析,从而估算出车位是否足以容纳车辆停放。
当车位长度大于车辆长度1.4米以上或更高时,控制单元会通过行车电脑显示屏发出准予停车的提示。
驾驶者只需要拨动转向灯开关,告诉系统靠道路哪一侧停车即可。
代表车型上海大众途观自动泊车系统大多只有在侧方停车时才能够使用,垂直停车入位的情况下不可使用,然而上海大众也为垂直停车做了准备,当途观需要垂直停车时,会在多媒体显示系统上出现动态倒车辅助线,只需要根据显示器上的辅助线表示的方向进行转向,便可轻松倒车入位。
奔驰B200B200的一个优点是它不需要人工开启自动泊车功能,当车速低于36km/h时就一直处于预备状态。
这样的好处是让驾驶者不会错过停车位或者能避免驶过停车位后才发现忘记启动系统的尴尬。
当探测到合适的停车位后,系统会显示“P”进行提示,挂入倒档,系统会显示“Park Assist Activate”,按动方向盘左侧的“上箭头”即为确定,之后的事情就让车辆自己去完成吧。
驾驶者只需通过刹车来控制车速,并注意车辆与前后两车的距离。
B200在完成泊车动作后,车轮能自动回正,驾驶者无需作任何的调整。
但需要注意的是,B200在进入自动泊车状态后,驾驶者双手不能触碰方向盘,否则系统会自动停止。
长安福特翼虎奥迪A7这1代官方并没有配置,国内选配6200的自动泊车是必须坐在里面踩刹车的,只是改进了可以支持侧方泊车和垂直地库泊车。