机械原理--运动分析
- 格式:ppt
- 大小:1.38 MB
- 文档页数:26


机械原理机械工程中的运动轨迹分析在机械工程中,运动轨迹的分析是一个重要的研究领域。
机械工程师需要了解和预测不同机械部件的运动轨迹,以便设计和优化各种机械系统。
本文将探讨机械原理中的运动轨迹分析方法及其应用。
一、运动轨迹的概念和定义在机械工程中,运动轨迹是指物体在运动过程中所形成的路径。
它可以描述物体从起始位置到终止位置的运动方式和轨迹形状。
运动轨迹的分析是为了确定物体在不同时间点的位置和速度,以及预测物体在未来某一时间点的位置和速度。
二、运动轨迹的分析方法1. 几何分析法:几何分析法是运动轨迹分析中最基本的方法之一。
它基于几何学原理,通过绘制物体在不同时间点的位置坐标,在坐标平面上构成轨迹图形。
通过分析轨迹图形的形状和特征,可以了解物体的运动规律和性质。
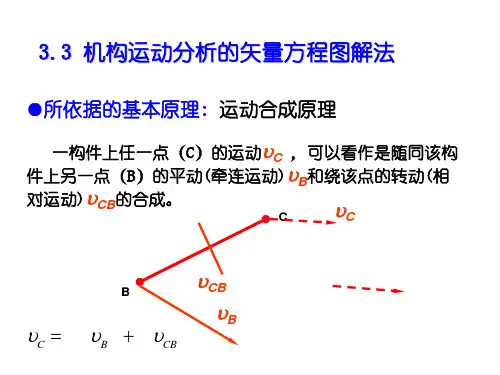
2. 向量分析法:向量分析法是一种使用向量和矢量运算来描述和分析运动轨迹的方法。
通过将运动轨迹表示为向量的形式,可以方便地进行矢量运算,如加法、减法、叉乘和点乘等,从而得到更精确和具体的运动轨迹信息。
3. 动力学分析法:动力学分析法通过运用牛顿第二定律和其他动力学原理,结合运动方程和受力分析,来分析和求解物体在给定条件下的运动轨迹。
这种方法适用于复杂的运动系统,可以考虑更多因素对运动轨迹的影响。
三、运动轨迹分析的应用1. 机器人运动规划:机器人学是机械工程中重要的分支之一,机器人的运动轨迹分析在机器人的路径规划和控制中起着关键作用。
通过分析机器人的运动轨迹,可以确定其最佳的路径和轨迹规划策略,以提高机器人的运动效率和性能。
2. 车辆运动分析:在汽车工程和交通工程领域,运动轨迹分析可以用于分析和优化车辆的行驶轨迹,提高车辆运动的平稳性和安全性。
通过运动轨迹的分析,可以了解车辆在不同道路条件下的行驶特点和操纵性能,为车辆设计和驾驶控制提供依据。
3. 机械装置设计:在机械装置设计中,运动轨迹分析可以用来确定机械零件的设计参数和轨迹形状,以满足特定的要求和功能。
一、选择题1.两个作平面相对运动的刚体,在任一瞬时其相对运动都可以看成绕某一重合点的()。
A平动B转动C直线移动2.速度瞬心是两个作平面相对运动的两刚体上瞬时()为零的重合点。
A绝对速度B牵连速度C相对速度3.若两刚体之一是静止的,则其速度瞬心便称()速度瞬心。
A绝对B相对C牵连4.若两刚体都是运动的,则其速度瞬心称为()。
A牵连瞬心B绝对瞬心C相对瞬心5.在速度多边形中极点p代表构件上()。
A速度为某值的点B速度为零的点C速度为常数的点6.在速度多边形中,连接极点p与任一点的向量代表机构图中同名点的()。
A绝对速度B牵连速度C相对速度7.在速度多边形中,连接除p点外的任意两点的向量代表机构图中同名点间的()。
A绝对速度B牵连速度C相对速度8.速度多边形中,线段bc代表()。
A绝对速度B相对速度9.相对速度V CB在速度多边形中表示为()。
A p→bB c→bC b→c10.在速度多边形中,矢量bc代表V CB,当用来判定构件角速度转向时,可将矢量bc移至机构图上的()。
A B点 B A点 C C点11.速度影像原理适用于()。
A不同构件上的各点B同一构件上的所有点C同一构件上的特定点12.利用速度影像原理求构件上任一点的速度,必须给定该构件上速度向量的最少点数为()。
A一点B两点C三点13.采用基点法进行平面机构运动分析时,动点相对基点(动参考系)的相对运动轨迹为()。
A直线B一般曲线C圆14.采用重合点法进行平面机构运动分析时,动点相对基点(动参考系)的相对运动轨迹为()。
A圆B直线C平面一般直线15.方程V B=V C+V CB的建立,选取的基点为()。
A C点B A点C B点16.方程V B3=V B2+V B3B2的建立,选取的动点为(),选取的基点为()。
A B2点B B3点C A3点17.方程V B3=V B2+V B3B2的建立,是按()法建立的。
A瞬心B重合点C基点二.填空题2.瞬心的定义可概括为:两个作平面相对运动的刚体上,瞬时为零的重合点,也就是两构件上瞬时重合点。
机械原理_瞬心法解析法机构运动分析瞬心法和解析法是机构运动分析中常用的两种方法。
瞬心法通过分析机构中各个零件的位置和速度,来确定机构的运动学性质。
解析法则通过解析机构的运动方程,得到机构的运动规律。
下面将详细介绍这两种方法并进行比较。
瞬心法是一种基于几何关系的方法,通过寻找机构中每个零件的瞬时转动中心,来确定机构的运动学性质。
瞬心是一个虚拟的点,表示零件在每一瞬时的转动中心。
具体的步骤如下:1.找到机构中的每个可动零件,并确定它们之间的连接关系。
2.将机构定位到其中一时刻,确定每个零件的位置和方向。
3.通过观察每个零件的几何关系,找到这个零件的瞬时转动中心。
4.重复步骤2和3,直到得到整个机构在一个周期内的瞬时转动中心。
5.根据瞬时转动中心的运动轨迹,分析机构的运动学性质。
解析法是一种基于运动方程的方法,通过解析机构的运动方程,来得到机构的运动规律。
具体的步骤如下:1.根据机构的几何形状和运动特点,建立机构的运动方程。
2.利用运动方程,解析得到机构的位置和速度的表达式。
3.分析机构的运动学性质,如速度、加速度等。
4.根据运动方程,得到机构的运动规律。
瞬心法和解析法的主要区别在于求解的方式不同。
瞬心法是通过观察几何关系,寻找零件的瞬时转动中心,从而确定机构的运动性质;而解析法则是通过建立和解析机构的运动方程,得到机构的位置、速度等表达式,从而确定机构的运动规律。
瞬心法的优点是简单直观,通过观察几何关系能够快速确定机构的运动性质。
它适用于对于机构零件的位置和速度感兴趣的情况。
另外,瞬心法也适用于对于机构的部分运动情况进行分析的情况。
解析法的优点是能够得到机构的运动规律的具体数学表达式,进一步分析机构的运动性质。
它适用于需要对机构的整个运动过程进行深入分析的情况,或者对机构的动力学特性感兴趣的情况。
虽然瞬心法和解析法有各自的优点和适用范围,但在实际应用中,常常结合使用。
比如,可以先通过瞬心法快速确定机构的运动特征,然后再用解析法进一步分析和求解,得到更详细的运动规律。
机械原理机构的运动分析机械原理机构的运动分析是研究机构运动特性和规律的过程。
机械原理机构是由若干个刚性构件通过铰链、滑动副等连接构成的机械系统,它能够完成各种复杂的机械运动任务。
在机械设计和分析中,了解机构的运动特性对于正确设计机械系统和优化结构具有重要意义。
机械原理机构的运动分析可以分为几个基本步骤。
首先,需要根据机构的布局和构造,确定机构的运动自由度。
机构的自由度是指机构可以自由移动的独立运动模式的数量。
它决定了机构的运动特性和平衡性。
一般来说,机构的自由度等于机构中刚性构件的数量减去约束条件的数量。
接下来,需要根据机构的结构和运动特点,选择合适的坐标系和坐标表达方式。
机构的运动可以用位移、速度和加速度来描述。
通过合理选择坐标系和坐标表达方式,可以简化运动分析和计算过程。
然后,根据机构的约束条件和运动自由度,建立机构的运动方程。
运动方程是描述机构中各个构件之间相对运动的数学描述。
通过求解机构的运动方程,可以得到机构各部分的运动状态,如角度、位移、速度和加速度等。
运动方程的求解可以采用解析方法、图解方法或数值方法等。
在运动分析中,还需要考虑机构的运动学性能指标。
运动学性能指标可以包括机构的工作速度、工作精度、稳定性等。
通过机构运动分析,可以定量评估和优化机构的运动性能,以满足设计要求。
最后,通过运动分析结果,可以评估机构的合理性和可行性。
如果机构的运动分析结果符合设计要求,说明机构能够正常工作,并且具有所需的运动特性。
如果机构的运动分析结果不符合设计要求,需要通过修改机构的结构或参数,重新进行运动分析和优化。
综上所述,机械原理机构的运动分析是研究机构运动特性和规律的重要过程。
通过运动分析,可以了解机构的运动自由度、建立运动方程、评估运动性能,并进行优化设计。
机械原理机构的运动分析对于机械系统设计和优化具有重要意义,能够提高机构的功能性、稳定性和工作效率。