第六章梁弯曲时的位移
- 格式:ppt
- 大小:820.00 KB
- 文档页数:38
材料力学梁的位移思维导图
材料力学梁的位移分析是一种复杂的思维,可以很好地帮助我们研究物理系统中的物理行为.以下是材料力学梁的位移思维导图:
I、定义梁:
1. 梁定义:梁是一种结构,由支撑它的支柱或壁连接到一组顶点,其中顶点可以是拱形形状或悬挂形状,能够承受弯矩外力。
2. 梁位移:梁的位移是指支撑它的支架或壁的相对位移。
它可以是相对位移、平行位移或扭矩位移
II、物理性质:
1. 梁的弯曲性:由于梁作为物体的一部分,它受到来自外界的外力,将会产生弯曲变形。
2. 梁的挠度:梁的挠度是梁的弯曲变形的程度。
它可以在梁的不同部位分布,高挠度会使梁变形更加明显。
III、位移测定:
1. 静力学:静力学方法可以通过对梁外力和顶点位移的测量,来确定梁位移的大小和分布情况,以及如何受到外力的影响。
2. 动态位移:动态位移测量将会提供深入的信息,这些信息会反映梁的动态行为,也就是振动响应。
IV、位移分析:
1. 力/位移关系:通过分析梁的力/位移关系,可以对梁的变形情况有一定的了解,以及梁承受外力时应激变形的状况。
2. 梁模型:通过建立梁模型,可以研究梁受到不同外力大小时的位移反应,并预测梁在某一状况下应受外力的大小。
V、总结:
材料力学梁的位移分析是一种复杂的思考,它主要包括梁的定义、物理性质、位移测定以及位移分析,可以很好地帮助研究者深入了解物理系统中物体的力学行为。
通过研究梁的弯曲性、挠度、力/位移关系以及建立梁模型,可以研究出梁的变形情况、预测梁应遭受的外力范围等,从而提高工件的力学性能和强度。


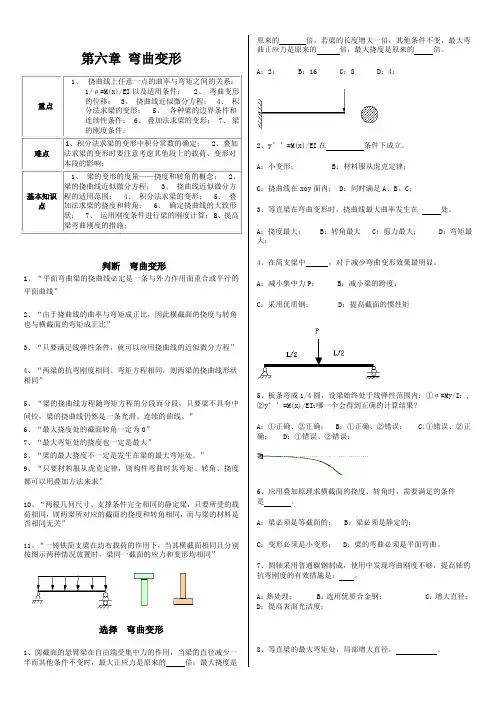
第六章弯曲变形判断弯曲变形1、“平面弯曲梁的挠曲线必定是一条与外力作用面重合或平行的平面曲线”2、“由于挠曲线的曲率与弯矩成正比,因此横截面的挠度与转角也与横截面的弯矩成正比”3、“只要满足线弹性条件,就可以应用挠曲线的近似微分方程”4、“两梁的抗弯刚度相同、弯矩方程相同,则两梁的挠曲线形状相同”5、“梁的挠曲线方程随弯矩方程的分段而分段,只要梁不具有中间铰,梁的挠曲线仍然是一条光滑、连续的曲线。
”6、“最大挠度处的截面转角一定为0”7、“最大弯矩处的挠度也一定是最大”8、“梁的最大挠度不一定是发生在梁的最大弯矩处。
”9、“只要材料服从虎克定律,则构件弯曲时其弯矩、转角、挠度都可以用叠加方法来求”10、“两根几何尺寸、支撑条件完全相同的静定梁,只要所受的载荷相同,则两梁所对应的截面的挠度和转角相同,而与梁的材料是否相同无关”11、“一铸铁简支梁在均布载荷的作用下,当其横截面相同且分别按图示两种情况放置时,梁同一截面的应力和变形均相同”选择弯曲变形1、圆截面的悬臂梁在自由端受集中力的作用,当梁的直径减少一半而其他条件不变时,最大正应力是原来的倍;最大挠度是原来的倍。
若梁的长度增大一倍,其他条件不变,最大弯曲正应力是原来的倍,最大挠度是原来的倍。
A:2; B:16 C:8 D:4;2、y’’=M(x)/EI在条件下成立。
A:小变形; B:材料服从虎克定律;C:挠曲线在xoy面内; D:同时满足A、B、C;3、等直梁在弯曲变形时,挠曲线最大曲率发生在处。
A:挠度最大; B:转角最大 C:剪力最大; D:弯矩最大;4、在简支梁中,对于减少弯曲变形效果最明显。
A:减小集中力P; B:减小梁的跨度;C:采用优质钢; D:提高截面的惯性矩5、板条弯成1/4圆,设梁始终处于线弹性范围内:①σ=My/I Z,②y’’=M(x)/EI Z哪一个会得到正确的计算结果?A:①正确、②正确;B:①正确、②错误; C:①错误、②正确; D:①错误、②错误;6、应用叠加原理求横截面的挠度、转角时,需要满足的条件是。

梁位移计算公式梁的位移计算公式基于梁的受力平衡和材料力学的基本原理。
在这里,我们将讨论一维梁的位移计算方法,即假设梁只在一个平面内受力,并且假设梁的截面尺寸和材料性质均为均匀的。
我们需要确定梁的边界条件。
常见的边界条件有两种:固定边界条件和自由边界条件。
在固定边界条件下,梁的两端被固定,不允许有任何位移和旋转;而在自由边界条件下,梁的两端可以自由位移。
接下来,我们需要确定梁的受力情况。
通常,梁在两端受到外部荷载作用,这些荷载可以是集中力、均布力或者集中力和均布力的组合。
此外,梁还可能受到自重的影响。
在计算位移时,我们需要将这些荷载转化为梁上的内力分布。
针对不同的受力情况,我们可以使用不同的位移计算方法。
在本文中,我们将重点介绍三种常见的位移计算方法:拉梁法、剪梁法和挠梁法。
拉梁法是一种基于受力平衡的位移计算方法。
它假设梁的变形是由拉伸和压缩引起的,而不考虑剪切变形。
根据拉梁法,我们可以通过梁上任意一点的变形位移和受力来计算梁的位移。
剪梁法是一种基于受力平衡和材料切变变形的位移计算方法。
它假设梁的变形是由剪切引起的,并考虑了横截面的形状和材料的性质。
根据剪梁法,我们可以通过梁上任意一点的切变位移和受力来计算梁的位移。
挠梁法是一种基于弯曲变形的位移计算方法。
它假设梁的变形是由弯曲引起的,并考虑了横截面的形状和材料的性质。
根据挠梁法,我们可以通过梁上任意一点的弯曲位移和受力来计算梁的位移。
在实际应用中,我们可以将以上三种方法结合起来,综合考虑拉伸、压缩、剪切和弯曲等因素,来计算梁的位移。
此外,我们还可以使用计算机辅助工具,如有限元分析软件,来进行更精确和复杂的梁位移计算。
需要注意的是,梁的位移计算是一个复杂的过程,需要综合考虑各种因素和假设。
在实际工程中,我们应该根据具体情况选择适当的位移计算方法,并进行合理的假设和简化,以确保计算结果的准确性和可靠性。
通过以上的讨论,我们可以看到,梁的位移计算是一个重要且复杂的问题。


第六章位移法一、几个值得注意的问题1、位移法的适用条件(1)位移法既可以求解超静定结构,也可以求解静定结构;正,顺时针为负。
4柱顶有相同的水平线位移。
(图中的-=50。
B 点以6-1-17 用位移法计算某一结构后,当荷载改变了,这应重新计算位移法基本方程式中的全部系数和自由项。
( )6-1-18 图6-1-5所示结构对称,荷载为反对称,用位移法计算时结点位移基本未知量最少可取为2个。
( )图6-1-56-1-19 位移法典型方程的右端项一定为零。
()6-1-20 用位移法求解结构内力时如果PR一定为零。
()M图为零,则自由项1P6-1-21 结构按位移法计算时,其典型方程的数目与结点位移数目相等。
()6-1-22 位移法未知量的数目与结构的超静定次数有关。
( )6-1-23 位移法的基本结构为超静定结构。
( )6-1-24 位移法是以某些结点位移作为基本未知数,先求位移,再据此推求内力的一种结构分析的方法。
()6-1-26 图6-1-7所示结构的位移法基本体系,其典型方程系数k为20,图中括号内数字为线刚度。
11()6-1-306-1-31 超静定结构中杆端弯矩只取决于杆端位移。
()6-1-32 位移法中的固端弯矩是当其基本未知量为零时由外界因素所产生的杆端弯矩。
()6-1-33 图6-1-12a对称结构可简化为图(b)来计算。
()6-1-34 位移法中角位移未知量的数目恒等于刚结点数。
()q,线位移未知量为_______。
图6-2-26-2-3 图6-2-3所示结构位移法基本方程的系数k11= __________EI/l。
A.18;B. 16;C.15;D.17。
A.附加约束i发生Z i=1时在附加约束i上产生的反力或反力矩;B.附加约束i发生Z i=1时在附加约束j上产生的反力或反力矩;C.附加约束j发生Z j=1时在附加约束i上产生的反力或反力矩;D.附加约束j发生Z j=1时在附加约束j上产生的反力或反力矩。
第六章弯曲变形知识要点1、弯曲变形的概念1)、挠曲线弯曲变形后梁的轴线变为挠曲线。
平面弯曲时,挠曲线为外力作用平面内的平面曲线。
2)、平面弯曲时的变形在小变形情况下,梁的任意二横截面绕各自的中性轴作相对转动,杆件的轴线变为平面曲线,其变形程度以挠曲线的曲率来度量。
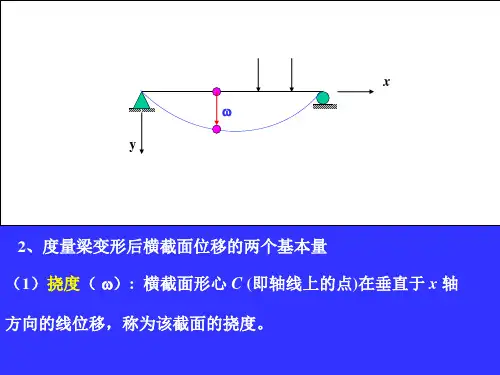
1》纯弯曲时,弯矩—曲率的关系(由上式看出,若弯曲刚度EI为常数则曲率为常数,即挠曲线为圆弧线)2》横力弯曲时,弯矩—曲率的关系3)、平面弯曲时的位移1》挠度——横截面形心在垂直于梁轴线方向上的线位移,以表示。
2》转角——横截面绕其中性轴旋转的角位移,以表示。
挠度和转角的正负号由所选坐标系的正方向来确定。
沿y轴正方向的挠度为正。
转角的正负号判定规则为,将x轴绕原点旋转90°而与y轴重合,若转角与它的转向相同,则为正,反之为负。
4)、挠曲线近似微分方程5)、受弯曲构件的刚度条件,2、积分法求梁的挠度和转角由积分常数C、D由边界条件和连续性条件确定。
对于梁上有突变载荷(集中力、集中力偶、间断性分布力)的情况,梁的弯矩M(x)不是光滑连续函数,应用上式时,应分段积分,每分一段就多出现两个积分常数。
因此除了用边界条件外,还要用连续性条件确定所有的积分常数。
边界条件:支座对梁的位移(挠度和转角)的约束条件。
连续条件:挠曲线的光滑连续条件。
悬臂梁边界条件:固定端挠度为0,转角为0连续条件:在载荷分界处(控制截面处)左右两边挠度相等,转角相等简支梁边界条件:固定绞支座或滑动绞支座处挠度为0连续条件:在载荷分界处(控制截面处)左右两边挠度相等,转角相等连接铰链处,左右两端挠度相等,转角不等3、叠加原理求梁的挠度和转角1)、叠加原理各载荷同时作用下梁任一截面的挠度和转角等于各个载荷单独作用时同一截面挠度和转角的代数和。
2)、叠加原理的限制叠加原理要求梁某个截面的挠度和转角与该截面的弯矩成线性关系,因此要求:1》弯矩M和曲率成线性关系,这就要求材料是线弹性材料2》曲率与挠度成线性关系,这就要求梁变形为小变形4、弯曲时的超静定问题——超静定梁1)、超静定梁约束反力数目多于可应用的独立的静力平衡方程数的梁称为超静定梁,它的未知力不能用静力平衡方程完全确定,必须由变形相容条件和力与变形间的物理关系建立补充方程,然后联立静力平衡方程与补充方程,求解所有的未知数。