蜗杆传动的基本参数
- 格式:ppt
- 大小:4.19 MB
- 文档页数:7
普通圆柱蜗杆传动的基本参数及几何尺寸计算1.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
对于传递运动的传动,z2可达200、300,甚至可到1000。
z1和z2的推荐值见下表(4)导程角γ蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距p a与蜗杆导程p z的关系为p z=z1p a,由下图可知:tanγ=p z/πd1=z1p a/πd1=z1m/d1=z1/q导程角γ的范围为3.5°一33°。
蜗杆传动的基本参数蜗杆传动是一种常见的传动机构,其主要由蜗轮与蜗杆组成。
蜗轮是一种齿轮,其齿形特殊,呈蜗旋线形状,而蜗杆是一种圆柱形的螺旋状轴。
蜗杆传动具有结构紧凑、承载能力大、传动比大、传动效率高等优势,在各种机械设备和工业领域中广泛应用。
蜗杆的蜗杆头径是指蜗杆轴上蜗杆的直径大小。
蜗杆头径会影响蜗杆传动的承载能力,一般来说,蜗杆头径越大,蜗杆传动的承载能力越大。
蜗杆步距是指蜗轮一次旋转所推动蜗杆前进的距离。
蜗杆步距决定了蜗杆传动的细分能力,即蜗轮每转一周,蜗杆前进一个步距,从而确定了蜗杆传动的传动比。
蜗杆长度是指蜗轮的宽度。
蜗杆长度会影响蜗杆传动的工作平稳性和传递扭矩的能力。
蜗杆的模数是指蜗轮齿廓和蜗杆螺旋线的截面形状的尺寸之比,是一个重要的参数。
模数的选择需要综合考虑蜗杆传动的应力和变形。
压力角是指蜗杆螺旋线与轴向的夹角,是蜗杆传动的设计中重要的参数之一、压力角的大小会影响蜗杆传动的接触性能和传动效率。
旋向是指蜗杆螺旋线的旋转方向,一般分为左旋和右旋两种。
蜗轮的模数是指蜗轮齿廓和蜗杆螺旋线的截面形状的尺寸之比。
蜗轮的模数需要与蜗杆的模数匹配,以确保传动的精度和工作平稳性。
压力角是指蜗轮齿廓与垂直于传动方向的线之间的夹角。
压力角的选择需要综合考虑蜗轮的齿强度和接触性能。
齿数是指蜗轮上齿的数量,影响蜗杆传动的传动比。
齿宽是指蜗轮齿廓沿蜗轮轴向的宽度。
齿宽需要满足传动扭矩和载荷要求。
螺旋角是指蜗轮上蜗杆螺旋线的扭曲角度。
螺旋角的选择需要考虑蜗杆传动的传动比和传动效率。
蜗杆基本尺寸参数表下面是一个蜗杆基本尺寸参数表的示例:1. 蜗杆直径(D):蜗杆直径是指蜗杆螺旋线的直径,通常用毫米(mm)作为单位。
在选择蜗杆时,一般根据承载能力和传动比等因素来确定蜗杆的直径。
2.蜗杆长度(L):蜗杆长度是指蜗杆螺旋线的长度,也就是蜗杆轴的长度。
蜗杆传动装置的工作效率直接受到蜗杆长度的影响,因此在设计过程中需要合理选择蜗杆的长度。
3.蜗芯直径(D1):蜗芯直径是指蜗杆螺旋线中心轴线上的直径。
蜗芯直径与蜗杆齿数有关,通常根据蜗杆的传动比、承载能力和工作效率等因素来确定蜗芯直径。
4.蜗杆齿数(Z):蜗杆齿数是指蜗杆螺旋线上的齿数。
蜗杆齿数是设计蜗杆传动装置时需要确定的重要参数,对于传动比和承载能力来说有着重要影响。
5.蜗杆螺距(P):蜗杆螺距是指蜗杆螺旋线上相邻两齿之间的距离。
蜗杆螺距直接关系到蜗杆传动装置的传动比和工作效率,因此在设计过程中需要根据具体要求来选择蜗杆的螺距。
6.蜗杆螺旋线角度(α):蜗杆螺旋线角度是指蜗杆螺旋线与蜗杆轴的夹角。
蜗杆螺旋线角度直接影响到蜗杆传动装置的承载能力和工作效率,因此在设计过程中需要根据具体要求来选择蜗杆螺旋线角度。
7. 蜗杆轴向模数(mn):蜗杆轴向模数是指蜗杆螺旋线的模数。
轴向模数与传动比、蜗杆齿数和蜗杆直径等因素相关,是设计蜗杆传动装置时需要确定的重要参数。
8.蜗杆传动比(i):蜗杆传动比是指蜗杆传动装置的输出转速与输入转速之比。
蜗杆传动比直接影响到蜗杆传动装置的工作效率和输出转矩,因此在设计过程中需要根据具体要求来选择合适的传动比。
以上是蜗杆基本尺寸参数表的示例,实际设计过程中还需要根据实际情况来确定具体数值和范围。
设计蜗杆传动装置需要考虑到许多因素,包括承载能力、工作效率、尺寸限制等,因此需要进行综合考虑和计算,以满足设计要求。
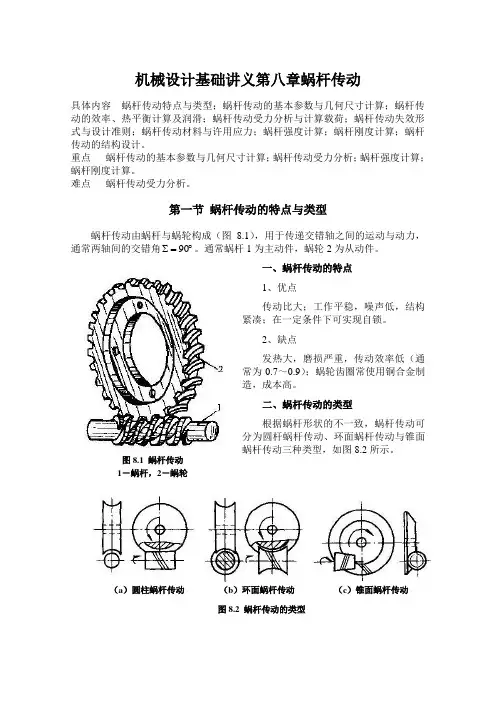
(a )圆柱蜗杆传动 (b )环面蜗杆传动 (c )锥面蜗杆传动图8.2 蜗杆传动的类型机械设计基础讲义第八章蜗杆传动具体内容 蜗杆传动特点与类型;蜗杆传动的基本参数与几何尺寸计算;蜗杆传动的效率、热平衡计算及润滑;蜗杆传动受力分析与计算载荷;蜗杆传动失效形式与设计准则;蜗杆传动材料与许用应力;蜗杆强度计算;蜗杆刚度计算;蜗杆传动的结构设计。
重点 蜗杆传动的基本参数与几何尺寸计算;蜗杆传动受力分析;蜗杆强度计算;蜗杆刚度计算。
难点 蜗杆传动受力分析。
第一节 蜗杆传动的特点与类型蜗杆传动由蜗杆与蜗轮构成(图8.1),用于传递交错轴之间的运动与动力,通常两轴间的交错角︒=∑90。
通常蜗杆1为主动件,蜗轮2为从动件。
一、蜗杆传动的特点1、优点传动比大;工作平稳,噪声低,结构紧凑;在一定条件下可实现自锁。
2、缺点发热大,磨损严重,传动效率低(通常为0.7~0.9);蜗轮齿圈常使用铜合金制造,成本高。
二、蜗杆传动的类型根据蜗杆形状的不一致,蜗杆传动可分为圆杆蜗杆传动、环面蜗杆传动与锥面蜗杆传动三种类型,如图8.2所示。
图8.1 蜗杆传动 1-蜗杆,2-蜗轮根据加工方法不一致,圆柱蜗杆传动又分为阿基米德蜗杆传动(ZA型)、法向直廓蜗杆传动(ZN型)、渐开线蜗杆传动(ZI型)与圆弧圆柱蜗杆传动(ZC型)等。
前三种称之普通圆柱蜗杆传动,见图8.3所示。
(a)阿基米德蜗杆(b)法向直廓蜗杆(c)渐开线蜗杆图8.3 普通蜗杆的类型第二节圆柱蜗杆传动的基本参数与几何尺寸计算在普通圆柱蜗杆传动中,阿基米德蜗杆传动制造简单,在机械传动中应用广泛,而且也是认识其他类型蜗杆传动的基础,故本节将以阿基米德蜗杆传动为例,介绍蜗杆传动的一些基本知识与设计计算问题。
一、蜗杆传动的基本参数通过蜗杆轴线并垂直于蜗杆轴线的平面称之中间平面,见图6.4。
在中间平面内,蜗杆与蜗轮的啮合相当于齿条与齿轮的啮合。
因此,设计圆柱蜗杆传动时,均取中间平面上的参数与几何尺寸作为基准。
蜗杆传动的基本参数资料
蜗杆传动是一种常见的传动方式,在机械领域广泛应用于减速装置中。
它由蜗杆和蜗轮组成,通过摩擦滚动传递动力。
蜗杆传动具有许多独特的
优点,如传动比大、传动平稳、体积小等。
以下是蜗杆传动的基本参数资料。
1.传动比
传动比是指蜗轮每转一周,蜗杆转动的圈数。
蜗杆传动的传动比一般
较大,通常为10:1到100:1、传动比的选择应根据具体需求来确定,一
般要考虑输出扭矩和输出转速等因素。
2.转速比
转速比是指蜗杆传动输出轴的转速与输入轴的转速之比。
蜗杆传动的
转速比较低,通常为5:1到80:1、转速比的选择与传动比密切相关,一
般较大的传动比会导致较小的转速比,反之亦然。
3.效率
4.承载能力
5.精度
6.耐磨性
蜗杆传动具有较好的耐磨性能,可以在较长时间内保持传动性能的稳定。
这是由于蜗杆传动中蜗轮与蜗杆之间的摩擦滚动机制所决定的。
为了
提高耐磨性,可以采用材料硬度高、表面处理等方法。
7.噪声和振动
蜗杆传动的噪声和振动较小,一般可以提供较安静、稳定的工作环境。
这主要是由于蜗杆传动中滚动摩擦的特性所决定的。
在应用中需要注意的是,蜗杆传动容易产生轻微的回转间隙,可能会引起振动和噪声,需要进
行适当的调整和控制。
总之,蜗杆传动是一种常见的传动方式,具有传动比大、传动平稳、
体积小等优点。
了解蜗杆传动的基本参数资料,可以帮助我们选择合适的
传动方式,并更好地应用于实际工程中。
蜗杆与蜗轮主要参数及几何计算一、蜗杆与蜗轮的主要参数1. 模数:蜗杆和蜗轮的齿轮尺寸参数之一,用来描述蜗轮齿数与蜗杆齿数的比例关系。
模数的单位通常为毫米(mm),常用的模数有0.5、1、1.5、2等。
2.蜗杆传动比(减速比):蜗杆与蜗轮之间齿轮传动的转速比,一般用i表示。
传动比等于蜗轮的齿数除以蜗杆的齿数,即i=Z2/Z1、蜗杆传动比通常为10至80左右。
3.螺旋线角度:蜗杆的螺旋线与轴线的夹角,通常用θ表示。
螺旋线角度决定了蜗杆的斜度,直接影响到蜗杆与蜗轮传动的效率。
4.蜗杆和蜗轮的材料:由于传动过程中会有相对滑动和高速摩擦,所以蜗杆和蜗轮通常使用耐磨、耐热、耐疲劳的材料,比如高强度合金钢、铜合金等。
5.渐开线角:蜗杆渐开线与垂直于轴线的圆柱面交线的夹角,用α表示。
渐开线角的大小会直接影响到蜗杆与蜗轮的传动效率和噪音。
二、蜗杆与蜗轮的几何计算1.蜗杆的直径计算:蜗杆的直径可以根据承受的转矩和材料的强度来确定。
通常根据公式d=K∛(T/σ)计算,其中d为蜗杆直径,K为一个系数,T为扭矩,σ为所选材料的强度。
2.蜗杆和蜗轮的齿数计算:蜗杆和蜗轮的齿数需要满足传动比和滚动角度等要求。
通常滚动角度为20°时,蜗杆的齿数为4至6;滚动角度为15°时,蜗杆的齿数为6至9、齿数的具体计算可以根据所选的传动比和齿轮的模数来确定。
3. 蜗轮的直径计算:蜗轮的直径需要根据滚动角度和蜗杆直径来确定。
一般来说,蜗轮的直径大于或等于蜗杆的直径。
可以根据公式d2 =d1 + 2mcosα 计算,其中d2为蜗轮的直径,d1为蜗杆的直径,m为模数,α为渐开线角。
4.蜗杆传动比的计算:蜗杆传动比等于蜗轮的齿数除以蜗杆的齿数。
根据所选的传动比和蜗杆的齿数,可以计算出蜗轮的齿数。
以上是蜗杆与蜗轮的主要参数和几何计算的介绍,这些参数和计算方法的正确选择和应用,能够保证蜗杆与蜗轮传动的效率和可靠性。
在实际应用中,还需要考虑到摩擦和磨损等因素,选择适当的润滑方式和材料,以提高传动的效率和寿命。
圆柱蜗杆传动主要参数及几何计算设计圆柱蜗杆传动时,均取给定平面上的参数和几何尺寸作为主要参数,参考齿轮传动的计算关系进行几何计算。
1. 蜗杆传动主要参数∙普通圆柱蜗杆的基准齿廓普通圆柱蜗杆的基准齿廓是指基准蜗杆在给定截面上的规定齿廓。
在蜗杆的轴平面内基准齿廓的尺寸参数包括:∙齿顶高:Ha = m(正常齿)ha = 0.8m(短齿)∙工作齿高:h’ = 2m(正常齿)h’ = 1.6m(短齿)∙轴向齿距:Px = πm (中线上的齿厚等于齿槽宽)∙顶隙:c = 0.2m,必要时可减小到0.15m或增大到0.35m∙齿根圆角:ρf = 0.3m, 必要时可减小到0.2m或增大到0.4m∙齿形角:阿基米德蜗杆,轴向齿形角αx = 20°,法向直廓蜗杆,法向齿形角αn = 20°,渐开线蜗杆,法向齿形角αn = 20°∙模数、蜗杆分度圆直径和直径特性系数1)模数m 在中间平面上的模数为标准值,即蜗杆的轴向模数mx和蜗轮的端面模数mt为标准值。
2) 蜗杆分度圆直径d1要保证蜗杆与蜗轮的正确啮合,蜗轮加工是用和与该蜗轮相啮合的蜗杆的直径、齿形参数完全相同的滚刀进行切制。
为了减少加工蜗轮的滚刀的规格数量,利于蜗轮滚刀的标准化和系列化,国标规定d1为标准值,且与m有一定的搭配关系。
3) 蜗杆直径特性系数q由于蜗杆分度圆直径d1和蜗杆模数m均为标准值,定义它们的比值为蜗杆直径特性系数,即d1 = mq。
∙蜗杆头数Z1和蜗轮齿数Z2蜗杆头数Z1是指蜗杆圆柱面上连续齿的个数,也就是螺旋线的线数。
常用取值为1,2,4,6。
Z1过多,加工制造的难度增加,精度不易保证;Z1减小,传动效率降低,传动比较大或要求自锁时取Z1=1。
蜗轮齿数Z2根据传动比i和Z1确定。
Z2 = i Z1。
为避免蜗轮轮齿发生根切和保证传动的平稳性,一般取蜗轮齿数Z2>27;同时为避免结构尺寸一定时,模数过小而导致弯曲强度不足或模数一定时,蜗轮直径过大而导致蜗杆轴支撑跨距过大从而刚度降低,蜗轮齿数也不宜过大,一般取Z2<80。
模数m、压力角、蜗杆直径系数q、导程角、蜗杆头数、蜗轮齿数、齿顶高系数(取1)及顶隙系数(取0.2)。
其中,模数m和压力角是指蜗杆轴面的模数和压力角,亦即蜗轮端面的模数和压力角,且均为标准值;蜗杆直径系数q为蜗杆分度圆直径与其模数m的比值,
模数
轴向齿距=模数*头数
齿顶圆直径
齿全高=2.2*模数
齿根圆直径=齿顶圆直径-2*齿全高
轴向齿厚=0.5*轴向齿距
分度圆直径=齿顶圆直径-2*模数
导程角:tan导程角=模数*头数/分度圆直径
1 中间平面内蜗杆与蜗轮的模数和压力角分别相等,即蜗轮的端面模数等于蜗杆的轴面模数且为标准值;蜗轮的端面压力角应等于蜗杆的轴面压力角且为标准值,即
==m ,==
2 当蜗轮蜗杆的交错角为时,还需保证,而且蜗轮与蜗杆螺旋线旋向必须相同。
蜗杆导程角()是蜗杆分度圆柱上螺旋线的切线与蜗杆端面之间的夹角,与螺杆螺旋角的关系为,蜗轮的螺旋角,大则传动效率高,当小于啮合齿间当量摩擦角时,机构自锁。
引入蜗杆直径系数q是为了限制蜗轮滚刀的数目,使蜗杆分度圆直径进行了标准化m一定时,q大则大,蜗杆轴的刚度及强度相应增大;一定时,q 小则导程角增大,传动效率相应提高。
蜗杆头数推荐值为1、2、4、6,当取小值时,其传动比大,且具有自锁性;当取大值时,传动效率高。
圆柱蜗杆传动主要参数及几何计算设计圆柱蜗杆传动时,均取给定平面上的参数和几何尺寸作为主要参数,参考齿轮传动的计算关系进行几何计算。
1. 蜗杆传动主要参数∙普通圆柱蜗杆的基准齿廓普通圆柱蜗杆的基准齿廓是指基准蜗杆在给定截面上的规定齿廓。
在蜗杆的轴平面内基准齿廓的尺寸参数包括:∙齿顶高:Ha = m(正常齿)ha = 0.8m(短齿)∙工作齿高:h’ = 2m(正常齿)h’ = 1.6m(短齿)∙轴向齿距:Px = πm (中线上的齿厚等于齿槽宽)∙顶隙:c = 0.2m,必要时可减小到0.15m或增大到0.35m∙齿根圆角:ρf = 0.3m, 必要时可减小到0.2m或增大到0.4m∙齿形角:阿基米德蜗杆,轴向齿形角αx = 20°,法向直廓蜗杆,法向齿形角αn = 20°,渐开线蜗杆,法向齿形角αn = 20°∙模数、蜗杆分度圆直径和直径特性系数1)模数m 在中间平面上的模数为标准值,即蜗杆的轴向模数mx和蜗轮的端面模数mt为标准值。
2) 蜗杆分度圆直径d1要保证蜗杆与蜗轮的正确啮合,蜗轮加工是用和与该蜗轮相啮合的蜗杆的直径、齿形参数完全相同的滚刀进行切制。
为了减少加工蜗轮的滚刀的规格数量,利于蜗轮滚刀的标准化和系列化,国标规定d1为标准值,且与m有一定的搭配关系。
3) 蜗杆直径特性系数q由于蜗杆分度圆直径d1和蜗杆模数m均为标准值,定义它们的比值为蜗杆直径特性系数,即d1 = mq。
∙蜗杆头数Z1和蜗轮齿数Z2蜗杆头数Z1是指蜗杆圆柱面上连续齿的个数,也就是螺旋线的线数。
常用取值为1,2,4,6。
Z1过多,加工制造的难度增加,精度不易保证;Z1减小,传动效率降低,传动比较大或要求自锁时取Z1=1。
蜗轮齿数Z2根据传动比i和Z1确定。
Z2 = i Z1。
为避免蜗轮轮齿发生根切和保证传动的平稳性,一般取蜗轮齿数Z2>27;同时为避免结构尺寸一定时,模数过小而导致弯曲强度不足或模数一定时,蜗轮直径过大而导致蜗杆轴支撑跨距过大从而刚度降低,蜗轮齿数也不宜过大,一般取Z2<80。
蜗杆的技术参数蜗杆是一种常见的传动装置,广泛应用于机械工程领域。
它具有多种技术参数,包括模数、螺旋角、齿数、压力角等。
下面将详细介绍蜗杆的这些技术参数及其作用。
蜗杆的第一个技术参数是模数。
模数是指蜗杆齿轮的齿距与模数的比值,用m表示。
模数的大小直接影响到蜗杆齿轮的尺寸和传动比。
通常情况下,模数越大,蜗杆齿轮的尺寸越大,传动比也越大。
模数是设计蜗杆传动时的重要参数之一,需要根据实际需求进行选择。
蜗杆的第二个技术参数是螺旋角。
螺旋角是指蜗杆螺旋线与蜗杆轴线之间的夹角,用β表示。
螺旋角的大小直接影响到蜗杆齿轮的传动效率和自锁性能。
一般情况下,螺旋角越小,传动效率越高,但自锁性能也越差。
因此,在设计蜗杆传动时需要综合考虑传动效率和自锁性能的要求,选择合适的螺旋角。
蜗杆的第三个技术参数是齿数。
齿数是指蜗杆齿轮上的齿的数量,用z表示。
齿数的大小直接影响到蜗杆齿轮的尺寸和传动比。
通常情况下,齿数越多,蜗杆齿轮的尺寸越大,传动比也越大。
齿数是设计蜗杆传动时需要考虑的重要参数之一,需要根据实际需求进行选择。
蜗杆的第四个技术参数是压力角。
压力角是指蜗杆齿轮齿廓上的法线与齿轮轴线之间的夹角,用α表示。
压力角的大小直接影响到蜗杆齿轮的传动效率和载荷分布。
一般情况下,压力角越小,传动效率越高,但载荷分布也越不均匀。
因此,在设计蜗杆传动时需要综合考虑传动效率和载荷分布的要求,选择合适的压力角。
除了以上几个技术参数外,蜗杆还有一些其他的技术参数,如蜗杆的材料、蜗杆齿轮的硬度等。
这些技术参数也是设计蜗杆传动时需要考虑的重要因素。
蜗杆的材料应具有足够的强度和硬度,以满足传动的要求。
蜗杆齿轮的硬度也要适中,既要保证齿面的耐磨性和强度,又要保证齿根的韧性,以防止齿面脱落和齿根断裂。
蜗杆的技术参数包括模数、螺旋角、齿数、压力角等。
这些技术参数直接影响到蜗杆传动的性能和使用效果。
在设计蜗杆传动时,需要根据实际需求选择合适的技术参数,并综合考虑传动效率、自锁性能、载荷分布等因素,以确保蜗杆传动的正常运行和可靠性。