高程导线计算表(含公式)
- 格式:xlsx
- 大小:19.32 KB
- 文档页数:84

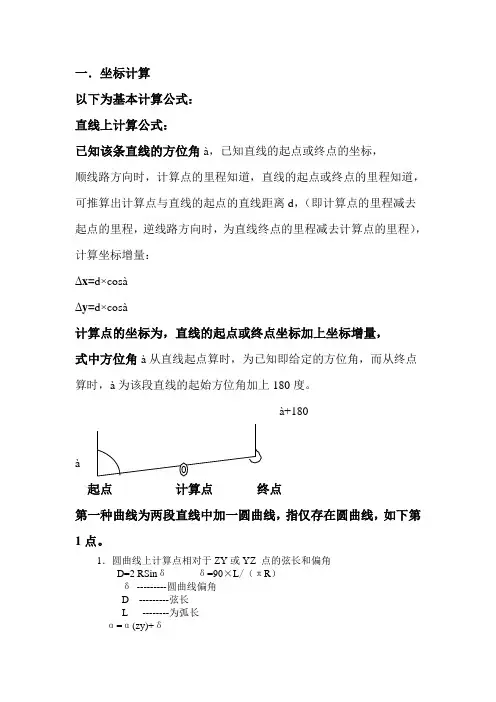
一.坐标计算以下为基本计算公式:直线上计算公式:已知该条直线的方位角à,已知直线的起点或终点的坐标,顺线路方向时,计算点的里程知道,直线的起点或终点的里程知道,可推算出计算点与直线的起点的直线距离d,(即计算点的里程减去起点的里程,逆线路方向时,为直线终点的里程减去计算点的里程),计算坐标增量:∆x=d×cosà∆y=d×cosà计算点的坐标为,直线的起点或终点坐标加上坐标增量,式中方位角à从直线起点算时,为已知即给定的方位角,而从终点算时,à为该段直线的起始方位角加上180度。
à+180à起点计算点终点第一种曲线为两段直线中加一圆曲线,指仅存在圆曲线,如下第1点。
1.圆曲线上计算点相对于ZY或YZ 点的弦长和偏角D=2 RSinδδ=90×L/(πR)δ---------圆曲线偏角D ---------弦长L --------为弧长α=α(zy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
α=α(yz)-δα------------为计算点的方位角,此α为逆着线路方向计算时。
α(zy)、α(yz)---------为圆曲线的起始方位角。
一般为已知。
计算点相对与直圆点或圆直点的坐标增量:△x=D*COSα△y=D*SINα坐标增量计算完毕后,要算某一点的坐标,用直圆点或圆直点的坐标加上计算点与直圆点或圆直点的坐标增量,即为计算点的坐标。
缓和曲线同理。
第二种曲线为两段直线中始端加一缓和曲线,末端加一缓和曲线,两段缓和曲线中加一圆曲线,如下第2点。
2.缓和曲线上计算点相对于HY或YH点的弦长和偏角δ=L²/6RL0X1=L-(L^5/40R²L0²)Y1=L³/6RL0D=√(X1²+Y1²)α=α(hy)+δα------------为计算点的方位角,此α为顺着线路方向计算时。
巧用Excel计算经纬仪导线和罗盘导线(湖南黑金时代长沙矿业集团刘洪元)摘要:经纬仪导线和罗盘导线计算是矿山测量内业中最重要和最经常的工作。
本文利用Excel的函数功能巧妙编辑方位角、坐标和高程计算公式,在不改变传统计算表格的前提下,通过编辑函数,一次性计算出所测边和点的方位角、坐标以及高程,极大地提高了计算速度、减轻了劳动强度,减少了出现差错的机率,同时也便于测量内业成果的保存。
关键词:Excel函数导线方位角坐标高程煤矿测量最经常的内业工作之一就是计算经纬仪导线和罗盘导线。
传统的计算方法需用计算器对方位角逐一推算,然后计算水平边长、三角高程和坐标,并且完全用手工在计算簿上填写。
这样的计算方法比较繁杂、费时,也容易因笔误而出现差错。
如果利用Excel工作表,巧妙编辑计算公式,则可将所有这些工作通过拖动鼠标一键完成,既省时省力,又可避免差错,还可统一表格格式并轻松建立导线成果电子档案。
一、经纬仪和罗盘导线计算所用的数学公式(数学模型)1、经纬仪导线计算数学公式1)方位角推算αn+ 1=αn + β左 + 180式中α--- 方位角;β---水平角( 左角) ;2)导线水平边长计算Dn+1= Ln * cosγ式中 L ---导线的斜长; D ---导线的水平边长;γ---垂直角。
3)导线坐标推算Xn+ 1 = Xn + D* cosαn+ 1Yn+ 1 = Yn + D* sinαn+ 1式中 D --- 导线水平边长α--- 方位角4)高程推算Hn+ 1= Hn + D * tgγ+ v - i式中 D---导线水平边长;γ--- 垂直角;v --- 前视高;i --- 仪器高。
2、罗盘导线计算数学公式罗盘导线与经纬仪导线的区别在于罗盘导线直接用磁方位角减去磁偏角得到导线方位角。
此外,罗盘导线高程计算中没有仪器高。
其余计算公式与经纬仪导线相同。
罗盘导线方位角推算αn+ 1=αn - β偏式中α--- 方位角;β--- 磁偏角(当推算方位角小于零时,加360O)二、Excel公式编辑(一)经纬仪导线计算公式编辑如图1所示,新建Excel表格,将经纬仪导线测量数据填入F5-P14区域(当竖直角为负时,度分秒都要输入负号),同时将起算边方位角和起始点坐标、高程填入R5-W5,并将测量日期、计算日期以及测点编号填入相应栏目后,开始编辑计算公式。
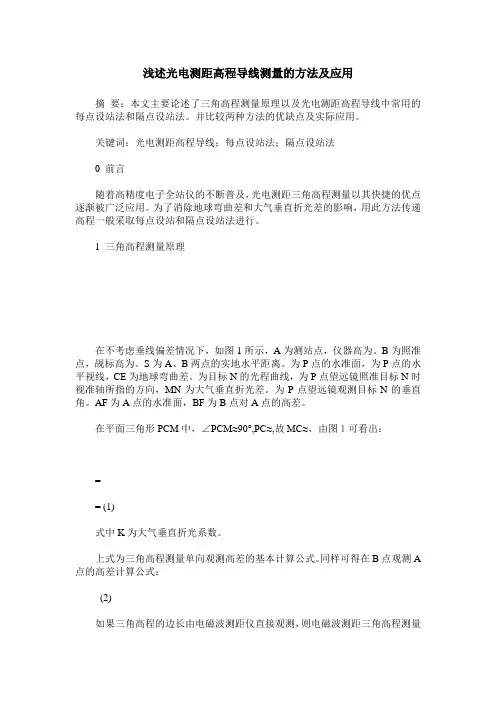
浅述光电测距高程导线测量的方法及应用摘要:本文主要论述了三角高程测量原理以及光电测距高程导线中常用的每点设站法和隔点设站法。
并比较两种方法的优缺点及实际应用。
关键词:光电测距高程导线;每点设站法;隔点设站法0 前言随着高精度电子全站仪的不断普及,光电测距三角高程测量以其快捷的优点逐渐被广泛应用。
为了消除地球弯曲差和大气垂直折光差的影响,用此方法传递高程一般采取每点设站和隔点设站法进行。
1 三角高程测量原理在不考虑垂线偏差情况下,如图1所示,A为测站点,仪器高为。
B为照准点,觇标高为。
S为A、B两点的实地水平距离。
为P点的水准面,为P点的水平视线,CE为地球弯曲差。
为目标N的光程曲线,为P点望远镜照准目标N时视准轴所指的方向,MN为大气垂直折光差。
为P点望远镜观测目标N的垂直角。
AF为A点的水准面,BF为B点对A点的高差。
在平面三角形PCM中,∠PCM≈90°,PC≈,故MC≈,由图1可看出:== (1)式中K为大气垂直折光系数。
上式为三角高程测量单向观测高差的基本计算公式。
同样可得在B点观测A 点的高差计算公式:(2)如果三角高程的边长由电磁波测距仪直接观测,则电磁波测距三角高程测量可按斜距由下列公式计算高差(3)式中,为测站与镜站之间的高差;为垂直角;为经气象改正后的斜距;为大气折光系数;为经纬仪水平轴到地面点的高度;为反光镜瞄准中心到地面点的高度。
该计算公式为光电测距三角高程测量单向观测高差的基本计算公式。
由(1)、(2)、(3)式可看出,如不考虑垂线偏差影响,则三角高程测量的主要误差来源是边长、垂直角、仪器高、觇标高的测量误差,以及球曲差和大气垂直折光差的影响。
属于人或仪器影响的误差一般都可以通过提高仪器精度,选择有利的观测条件及认真作业等加以消除。
关于球曲差,在同一测区,可认为其地球平均曲率半径相同,可通过对向观测或控制前后边长差加以消除。
大气垂直折光由大气密度的分布不均匀引起,它随大气压、温度、湿度、风场、植被、海拔等的变化而变化,具有不稳定性。
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
一、方位角的计算公式二、平曲线转角点偏角计算公式三、平曲线直缓、缓直点的坐标计算公式四、平曲线上任意点的坐标计算公式五、竖曲线上点的高程计算公式六、超高计算公式七、地基承载力计算公式八、标准差计算公式九、坐标中线测量与计算十、全站仪的使用方法和坐标测量步骤一、 方位角的计算公式1. 字母所代表的意义:x 1:QD 的X 坐标 y 1:QD 的Y 坐标 x 2:ZD 的X 坐标 y 2:ZD 的Y 坐标 S :QD ~ZD 的距离 α:QD ~ZD 的方位角2. 计算公式:()()212212y y x x S -+-=1)当y 2- y 1>0,x 2- x 1>0时:1212x x y y arctg--=α 2)当y 2- y 1<0,x 2- x 1>0时:1212360x x y y arctg --+︒=α 3)当x 2- x 1<0时:1212180x x y y arctg--+︒=α 二、 平曲线转角点偏角计算公式1. 字母所代表的意义:α1:QD ~JD 的方位角 α2:JD ~ZD 的方位角β:JD 处的偏角2. 计算公式:β=α2-α1(负值为左偏、正值为右偏)三、 平曲线直缓、缓直点的坐标计算公式1. 字母所代表的意义:U :JD 的X 坐标 V :JD 的Y 坐标 A :方位角(ZH ~JD )T :曲线的切线长,2322402224R L L D tg R L R T ss s -+⎪⎪⎭⎫ ⎝⎛+=D :JD 偏角,左偏为-、右偏为+2. 计算公式:直缓(直圆)点的国家坐标:X ′=U+T cos(A+180°)Y ′=V+Tsin(A+180°)缓直(圆直)点的国家坐标:X ″=U+T cos(A+D)Y ″=V+Tsin(A+D)四、 平曲线上任意点的坐标计算公式1. 字母所代表的意义:P :所求点的桩号B :所求边桩~中桩距离,左-、右+ M :左偏-1,右偏+1C :JD 桩号 D :JD 偏角 L s :缓和曲线长 A :方位角(ZH ~JD ) U :JD 的X 坐标 V :JD 的Y 坐标T :曲线的切线长,2322402224R L L D tg R L R T ss s -+⎪⎪⎭⎫ ⎝⎛+=I=C-T :直缓桩号 J=I+L :缓圆桩号s L DRJ H -+=180π:圆缓桩号K=H+L :缓直桩号2. 计算公式: 1)当P<I 时中桩坐标:X m =U+(C-P)cos(A+180°) Y m =V+(C-P)sin(A+180°)边桩坐标:X b =X m +Bcos(A+90°) Y b =Y m +Bsin(A+90°)2)当I<P<J 时()s230RL I P MA O π-︒+= ()()2390R I P I P G ---=中桩坐标:X m =U+Tcos(A+180°)+GcosO Y m =V+Tsin(A+180°)+GsinO()s290RL I P W π-︒=边桩坐标:X b =X m +Bcos(A+MW+90°) Y b =Y m +Bsin(A+MW+90°)3)当J<P<H 时()()R J P L M A R J P R L M A O s s πππ-+︒+=⎪⎭⎫⎝⎛-︒+︒+=909090 ()RJ P R G π-︒=90sin2中桩坐标:()O G R L M A R L L A T U X s ss m cos 30cos 90180cos 23+⎪⎭⎫ ⎝⎛︒+⎪⎪⎭⎫ ⎝⎛-+︒++=π ()O G R L M A R L L A T V Y s ss m sin 30sin 90180sin 23+⎪⎭⎫ ⎝⎛︒+⎪⎪⎭⎫ ⎝⎛-+︒++=π ()RJ P W π-︒=90边桩坐标:X b =X m +Bcos(O+MW+90°)Y b =Y m +Bsin(O+MW+90°)4)当H<P<K 时()sRL K P MMD A O π230180-︒-︒++= ()2390R P K P K G ---=中桩坐标:X m =U+Tcos(A+MD)+GcosO Y m =V+Tsin(A+MD)+GsinO()s290RL K P W π-︒=边桩坐标:X b =X m +Bcos(A+MD-MW+90°) Y b =Y m +Bsin(A+MD-MW+90°)5)当P>K 时中桩坐标:X m =U+(T+P-K)cos(A+MD) Y m =V+(T+P-K)sin(A+MD) 边桩坐标:X b =X m +Bcos(A+MD+90°) Y b =Y m +Bsin(A+MD+90°)注:计算公式中距离、长度、桩号单位:“米”;角度测量单位:“度”;若要以“弧度”为角度测量单位,请将公式中带°的数字换算为弧度。
六、计算题:1、一测回角度测量,得上半测回A左=63°34′43″,下半测回A右=63°34′48″。
求一测回角度测量结果,结果取值到秒。
2、表中各直线的已知方向值换算出它们的正、反方位角或象限角,并填在表中。
直线名称正方位角(0 /)反方位角(0 /)象限角(0 /)AB 315 30AC 60 20CD 127 24 52 363、计算下表闭合水准路线各水准点的高程, 见表。
测站点号方向高差观测值h'i(m) 测段长Di(km) 测站数nI 高差改正数vi=-Wni/N(mm) 改正后高差值(m) 高程(m)BM 67.6481 1.224 0.535 10A2 -2.424 0.980 15B3 -1.781 0.551 8C4 1.714 0.842 11D5 1.108 0.833 12BM 67.648(2)W=∑h'i= mmW容=±58mm (5)[D]= km (6)N= (10)∑v= mm ∑h=4、下图中,A点坐标xA=600.25m,yA=1300.78m;B点坐标xB=300.25m,yB=1000.78m。
水平角=15°36′27″,=84°25′45″,=96°47′14″。
求方位角,,,。
5、计算下图闭合水准路线各水准点的高程。
闭合水准路线的计算测站点号方向高差观测值h'i(m) 测段长Di(km) 测站数nI 高差改正数vi=-Wni/N(mm) 高差(m) 高程(m)BM 67.6481 1.224 0.535 10A2 -2.424 0.980 15B3 -1.781 0.551 8C4 1.714 0.842 11D5 1.108 0.833 12BM 67.648Wni=∑h’i= mmW容=±58mm [D]= km N= ∑v= mm ∑h=6、已知A点坐标XA=140m,YA=70m;B点坐标XB=90m,YB=120m。

实验四、经纬仪导线测量与导线坐标计算一、实验目的1.学会在地面上用经纬仪标定直线及用普通钢尺精密丈量距离方法。
2.学会导线外业的基本测量工作。
3.学会用罗盘仪测定直线的磁方位角。
二、实验计划1. 实验时数4学时。
2. 每实验小组由4到5人组成。
1人观测,1人记录,2人扶尺,依次轮流进行。
3. 每组在实验场地上选定4到5个导线点,组成闭合导线,进行量距、测角。
4. 用罗盘仪测定起始直线的磁方位角,进行导线坐标计算。
雅安地区磁偏角为西偏2度24分。
据此推算起始边方位角。
三、仪器与工具1. 由仪器室借领:电子经纬仪1台、50 m钢尺1把、测钎2根、水泥钉6个、钉锤1把、记录板1个、计算器一个,罗盘仪1台。
2. 自备:、铅笔、小刀、计算用纸、测角与测距记录纸。
四、实验方法与步骤1. 指导教师讲解本次实习的内容和方法。
2. 在实习场地上选定比较平坦、相距60 m ~ 80 m的边长的多边形,构成一闭合导线,打入小铁钉(或油漆绘标记)。
3. 进行直线定线。
欲精密丈量直线AB的距离,首先清除直线上的障碍物,然后安置经纬仪于A点上,瞄准B点,用经纬仪进行定线。
用钢尺进行概量,在视线上依次定出此钢尺一整尺略短的A1、12、23……等尺段。
在各尺段端点粉笔绘标记,4.丈量距离用检定过的钢尺丈量相邻两点之间的距离。
丈量组一般由5入组成,2人拉尺,2人读数,1人指挥兼记录。
丈量时,拉伸钢尺置于相邻两点,并使钢尺有刻划线一侧贴近标志。
拉平、拉紧、拉直。
两端的读尺员同时根据点位读取读数,估读到0.1mm记入手簿。
每尺段要移动钢尺位置丈量三次,三次测得的结果的较差视不同要求而定,一般不得超过5mm,否则要重量。
如在限差以内,则取三次结果的平均值,作为此尺段的往测观测成果。
本次实习不考虑三项改正问题,每个尺段相加即为总边长。
每个边应往返丈量。
在记录表中进行成果整理和精度计算。
直线丈量相对误差要小于1/2000。
如果丈量成果超限,要分析原因并进行重量,直至符合要求为止。
1、导线内业计算基本原理(1)坐标的正算x B=x A+Δx AB Δx AB=S AB cosαABy B=y A+Δy AB Δy AB=S AB sinαAB(2)坐标的反算tanαAB=Δy AB/Δx AB=(y B- y A)/(x A-x B)S AB =(3)坐标方位角的传递根据坐标方位角之间的几何关系,可以得到如下计算公式:当水平角为左角时,α前=α后+β左-180O当算出的角度为负值时,加360O转换为正角。
当水平角为右角时,α前=α后-β右+180O当算出的角度为负值时,加360O转换为正角。
6.2普通导线测量随着测绘科学技术的不断发展,电磁波测距和电子计算机技术的广泛应用,以导线测量的方法来建立平面控制网得到迅速推广。
导线的布设形式有下述几种:1.闭合导线闭合导线是从一个已知点出发,最后仍回到这个已知点。
如图6-2所示,由已知控制点1出发,经过2、3、4、5、6点最后仍闭合到1点,形成一个闭合多边形。
2.附合导线敷设在两个已知点之间的导线,称为附合导线。
如图6-5所示,由已知点B 和已知方向αAB 出发,经过导线点1、2、3、4点最后附合到已经点C 和已知方向αCD 。
图6-5 附合导线 图6-6 支导线3.支导线支导线也称自由导线,它是由一个已知点出发,既不回到原出发点又不附合到另外已知点上。
如果测量发生粗差,这种导线无法检核。
因此,布设时一般不得超过二条边(图6-6)。
6.2.1导线测量外业工作导线测量的外业工作包括:踏勘选点、角度测量、边长测量以及导线连接测量。
其工作内容如下:1.踏勘选点踏勘选点之前,应先到有关部门收集原有地形图、高一级控制点的坐标和高程,以及这些已知点的位置详图。
然后按坐标把已知点展绘在原有的地形图上,在图上规划导线的布设方案。
最后带上所规划的导线网图,到实地选定各点点位并建立标志。
现场选点应注意如下事项:(1)相邻导线点间应互相通视,以便测角和测边(如果采用钢尺量距,地势应较为平坦)。
1.水准路线高差闭合差的计算:f h= Σh测水准路线的成果检测:水准测量外业观测数据存在高差闭合差,高差闭合差需满足一定的限差,四等水准限差:fh允=±20√L L:水准路线全长,以KM为单位,不足1KM按1KM计算。
若高差闭合差超出此范围,表明成果中有错误存在,则要重返工作。
2.分配高差闭合差、检核测段高差改正数vi为:V i= - f hΣLL iΣ V i=-f h(检核)式中:ΣL——水准路线各测段的总长度,单位为km;L i——某一测段的长度,单位为km。
3.计算各测站改正后高差、检核h 改=h测+V iΣh改=0(检核)4.推算各待定点高程、检核H i=H i−1+h改H已知值=H推算值(检核)1.计算角度闭合差fβ:fβ= Σβ测- (n-2)×180°n:导线测量总测站数导线测量的成果检测:导线测量外业观测数据存在角度闭合差,角度闭合差需满足一定的限差,三级导线限差:fβ允=±24√n n:导线测量总测站数若角度闭合差超出此范围,表明成果中有错误存在,则要重返工作。
2.分配角度闭合差、检核测站角度改正数vi为(平均分配,大角多分、小角少分):V i= - fβnV =-fβ(检核)式中:n——测站数;3.计算各边方位角、检核α前= α后+β左±180°或α前= α后- β右±180°α已知方位角=α推算方位角(检核)4.计算坐标增量ΔX= D cosα f x= ΣΔXΔY= D sinαf y= ΣΔY或REC(距离,方位角) f= √ f x2+ f y2K =fΣD5.分配坐标增量、检核坐标增量改正数vi为:V x= - f xΣD L DΣ Vx改=-f x(检核)V y= - f yΣD L DΣ Vy改=-f y(检核)式中:ΣD——导线边长总长度,单位为m;L D——某一边长的长度,单位为m。
闭合导线平差计算步骤:1、绘制计算草图。
在图上填写已知数据和观测数据。
2、角度闭合差的计算与调整(1)计算闭合差:(2)计算限差:(图根级)(3)若在限差内,则按平均分配原则,计算改正数:(4)计算改正后新的角值:3、按新的角值,推算各边坐标方位角。
4、按坐标正算公式,计算各边坐标增量。
5、坐标增量闭合差的计算与调整(1)计算坐标增量闭合差。
有:导线全长闭合差:导线全长相对闭合差:(2)分配坐标增量闭合差若 K<1/2000 (图根级),则将、以相反符号,按边长成正比分配到各坐标增量上去。
并计算改正后的坐标增量。
6、坐标计算根据起始点的已知坐标和经改正的新的坐标增量,来依次计算各导线点的坐标。
[ 例题 ] 如图所示闭合导线,试计算各导线点的坐标。
计算表格见下图:闭合水准路线内业计算的步骤:(1) 填写观测数据(2) 计算高差闭合差h f =∑h ,若h f ≤容h f时,说明符合精度要求,可以进行高差闭合差的调整;否则,将重新进行观测。
(3) 调整高差闭合差 各段高差改正数:i hi i hi L L f V n nf V ·· ∑-=∑-=或各段改正高差:ii i V h h +=改(4) 计算待定点的高程闭合差(fh )水准路线中各点间高差的代数和应等于两已知水准点间的高差。
若不等两者之差称为闭合差高差闭合差的计算.支水准路线闭合差的计算方法.附合水准路线闭合差的计算方法.闭合水准路线闭合差的计算方法高差闭合差容许值 (n 为测站数,适合山地)(L 为测段长度,以公里为单位,适合平地)水准测量中,消除闭合差的原则一般按距离或测站数成正比地改正各段的观测高差改正数每公里改正数各测段的改正数每一站改正数各测段的改正数计算的基本步骤高差闭合差的计算闭合差的调整高程的计算(见例题2)例题2高程误差配赋表首先:将检查无误的野外观测成果填入计算表,包括:各测段的距离和高差值h i已知数据第一步:高差闭合差的计算第二步:高差闭合差的调整各测段实测高差加改正数,得改正后的高差h i第三步:待定点高程的计算根据改正后的高差h i,由起始点Ⅲ18开始,逐点推算出各点的高程,列入表中最后算得的Ⅲ19点的高程应与已知的高程HⅢ19相等,否则说明闭合水准路线闭合水准路线的成果计算与附合水准路线基本相同,不同之处是检核条件与附合水准路线不同。