基于plc实现三相异步电动机七段速调速实验..
- 格式:doc
- 大小:548.50 KB
- 文档页数:18
高等教育自学考试本科毕业论文基于PLC的三相异步电机变频调速系统的设计高等教育自学考试本科毕业论文基于PLC的三相异步电机变频调速系统的设计摘要随着科技的进步,电机的运用已经深入到各行各业的各个领域。
而现今也是一个资源高度消耗造成能源匮乏的时代,在这个时候考虑如何让其在高可靠性的同时又有效的节约能源耗费提高自身的效率,这不仅可以使企业的生产成本降低,而且对于社会的可持续发展有着重要的意义。
本文所讨论的是利用PLC控制的三相异步电机变频调速的基本原理与实现方法。
三相异步电机一般的调速方法有:降压调速,转子回路串电阻调速,变极调速,串极调速,变频调速等。
但是这些调速方法都有着各自的缺点,降压调速的调速范围很小,没有多大的实用价值;转子回路串电阻调速不利于空载或轻载调速,效率低,经济性差;变极调速调速的平滑性差;串极调速的控制设备复杂,成本高,控制困难。
所以调速性能至少需从两方面考虑。
第一,应从节能和提高效率的角度考虑,应将损耗在转子附加电阻上的能量吸收,转化成别的有用的能量或反馈到电网,以提高传动系统的效率。
第二,应从高性能调速要求考虑,应用控制理论,将其组成闭环调速控制系统,满足调速精度、动态响应等各项指标的要求。
综上所述,利用PLC控制的变频调速系统,是使三相异步电动机实现高性能高效率调速的有效办法。
通过改变定子绕组的供电频率f来实现,当转差率s一定时,电动机的转速n基本上正比于f。
很明显,只要有输出频率可以平滑调节的变频电源,就能平滑的调节异步电动机的转速。
关键词:变频调速,PLC,异步电机The three-phase asynchronous motor variable frequency speed regulation system based on PLC designAbstractHuman being is seriously threatened by exhausting mineral fuel, such as coal and fossil oil. As a kind of new type of energy sources, solar energy has the advantages of unlimited reserves, existing everywhere,using clean and economical .But it also has disadvantages ,such as low density,intermission,change of space distributing and so on. These make that the current series of solar energy equipment for the utilization of solar energy is not high. In order to keep the energy exchange part to plumb up the solar beam,it must track the movement of solar.In this paper, the solar tracking system of the mechanical part and control system part are designed.Mechanical structure mainly includes the main spindle, stepping motors, gears and gear ring, and so on. When the sun's rays has a deviation, small gear are rotated by stepper motor according to the control signal from MCU. And the large gear and main spindle is rotated by small gear in order to track to achieve the level direction.At the same time, another small gear is rotated by another stepper motor according to the control signal.And the large gear and the solar panels are rotated by the small gear in order to track to achieve the vertical direction. Solar is tracked by the two stepper motors together.Control system mainly includes the sensors part, stepper motor, MCU system and the corresponding external circuit, and so on. Photoelectric detection system is used to track solar. Sensors use photosensitive resistance. The two same photosensitive resistances were placed in east and west direction of the bottom edge .When the two photosensitive resistances received different light at the same time, the signal from comparison circuit is sent to MCU in order to rotate stepping motors.Keywords: Frequency control, PLC, asynchronous motor目录中文摘要 (II)英文摘要 ........................................................................................ 错误!未定义书签。
基于PLC实现电机调速控制实验报告基于PLC实现电机调速控制一、实验名称:基于PLC实现电机调速控制。
二、实验目的:1.通过综合实验训练学生独立设计、独立处理问题的能力。
2.掌握变频器的使用方法,及基本参数功能3.进一步了解PLC编程的方法及外围电路的构成,实验程序最终能够正确实现电机调速的控制。
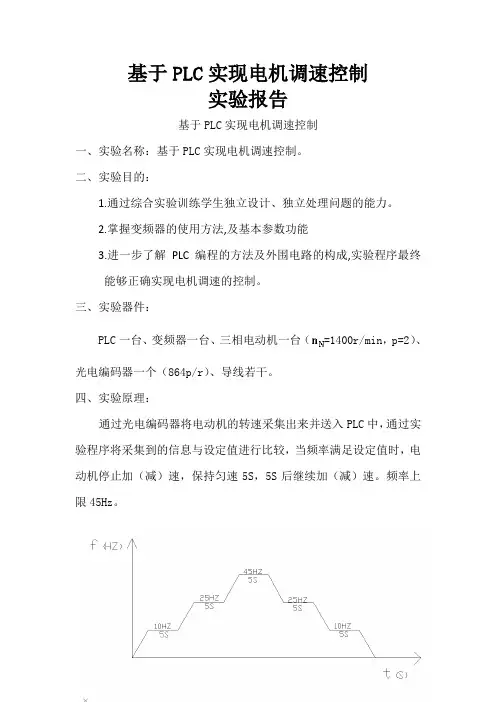
三、实验器件:PLC一台、变频器一台、三相电动机一台(=1400r/min,p=2)、光电编码器一个(864p/r)、导线若干。
四、实验原理:通过光电编码器将电动机的转速采集出来并送入PLC中,通过实验程序将采集到的信息与设定值进行比较,当频率满足设定值时,电动机停止加(减)速,保持匀速5S,5S后继续加(减)速。
频率上限45Hz。
实验速度曲线如下图: 五、实验原理图及接线图: 1.实验原理图: 光电编码器:COM01030002040CH2.六、各参数设置: 1.变频器参数设置:2.2K0~20mA模拟量输入123V1V2V3I2CMOP1OP2OP3OP4OP5OP6OP7OP8RS TTB W V PEM ~TA TC 12A/125VAC 7A/250VAC 7A/30VDC三相输入380VAC 50/60HzQS多功能模拟量(电流)输出2:4~20mA多功能模拟量(电压)输出1:0~10V FM IM V3多功能输出端子112V OUT1OUT2JJ 多功能输出端子2Modbus 通讯RS-485A+B-U 多功能继电器输出方式▲运行设置▼停/复RUN FWD DGT FRQ2.编码器接口:3.PLC端口:4.内部参数设置:七、程序流程图:八、实验结果:按照接线图接好线经检查无误后,按下正转(反转)按钮后,正电动机正转(反转)加速,频率达到10hz后保持匀速运行5s,然后继续加速,频率达到25hz后在保持匀速运行5s,然后继续加速直到频率达到45Hz,当频率到45hz后保持运行5s然后开始减速,减速过程中分别在25hz、10hz保持匀速运行5s,在运行过程中按下停止按钮,电机即减速停止。
基于PLC控制的三相异步电动机调速系统作者:康婧来源:《硅谷》2009年第16期[摘要]着重阐述由三菱公司生产的PLC、变频器和触摸屏组成的三相异步电动机调速系统的工作原理及实现方法。
此调速系统依靠PLC、变频器和触摸屏三者之间的通讯实现资料共享,从而达到实时控制的目的,同时具有较高的工作可靠性,速度实时调节的灵活性,操作的简易性,维护的方便性等特性。
[关键词]PLC控制技术变频器触摸屏中图分类号:TM3文献标识码:A文章编号:1671-7597(2009)0820018-01一、前言随着计算机技术、电子技术的不断进步,PLC(可编程逻辑控制器)技术、变频(变频器)调速技术的发展极为迅速,已渗透到各个领域。
以它们为主导的现代生产技术正以史无前例的速度迅猛发展。
加上可视化的人机接口的发展,使对自动化生产过程的实时控制和实时监视成为了可能,本文以利用PLC、变频器与触摸屏等现代化控制器来实现传统的三相异步电动机速度控制为例,具体介绍PLC、变频器和触摸屏在此系统中的实际作用、工作方式及三者之间的通讯方法。
二、系统的工作原理该系统硬件的连接方式主要通过三菱FR-700变频器实现对三相异步电动机的速度调节,然后通过PLC与变频器的通讯实现数据共享,用户可以通过编制PLC程序,实现变频器参数的实时修改从而达到改变电动机速度的目的,参数修改的方式可以是外在设置的按钮组件,也可以通过触摸屏的触摸键对变频器的参数进行设定,同时触摸屏可以实时反映电动机的工作参数,如输出电压、输出功率等,从而可以满足集中控制的需求。
三、触摸屏设置与控制画面制作(一)触摸屏的通讯连接F940GTO触摸屏有两个通讯接口,分别是RS232和RS422接口,在此系统中,这RS232接口与计算机RS232接口连接,RS422接口与PLC的RS485接口连接。
(二)PLC程序设计1.正转程序介绍以上为正转指令部分,通过D11、D12对所通信的变频器站号进行设定,这里设定H30、H31表设定的站号为1号,此处设定必须与变频器自身设定一致,否则不能实现通信。
基于PLC变频器三相异步电动机正反的控制【摘要】本文主要探讨了基于PLC变频器控制三相异步电动机正反转的技术及应用。
首先介绍了研究背景和意义,探讨了PLC在电机控制中的应用以及变频器在电机控制中的作用。
然后详细解析了三相异步电动机的工作原理,包括正转控制策略和反转控制策略。
论文对基于PLC变频器控制三相异步电动机正反转的应用前景进行了展望,并提出了未来研究方向。
通过本文的研究,可以更好地了解和掌握基于PLC变频器的电机控制技术,为相关领域的工程应用提供参考和指导。
【关键词】PLC,变频器,三相异步电动机,正反控制,应用前景,工作原理,控制策略,研究意义,研究目的,总结与展望,建议未来研究方向1. 引言1.1 背景介绍电动机是工业生产中常见的驱动设备,广泛应用于各类机械设备、生产线等领域。
传统上,电机的控制主要通过接触器、继电器等传统电气元件实现,存在操作复杂、维护困难、精度低等问题。
而随着自动化技术的发展,基于PLC和变频器的控制方案逐渐成为电机控制的主流模式。
三相异步电动机作为工业生产中最常见的电机类型,其工作原理复杂且性能优越。
正反控制策略是指根据实际需求来控制电机的正转和反转运行,实现精准控制和调节。
本文旨在探讨基于PLC和变频器的控制方案在三相异步电动机正反控制中的应用,为提高电机控制精度、降低能耗、提高生产效率提供技术支持和参考。
1.2 研究意义三相异步电动机在工业生产中应用广泛,其正反控制对于提高生产效率、降低能耗具有重要意义。
通过基于PLC(可编程逻辑控制器)和变频器对三相异步电动机进行控制,可以实现精确的正反转调速控制,提高生产线的灵活性和稳定性。
基于PLC变频器控制的电动机系统能够实现智能化、自动化控制,减少人力成本和操作复杂度。
研究基于PLC变频器三相异步电动机正反控制的意义还体现在技术创新和节能减排方面。
通过优化控制策略和参数设置,可以降低电机运行时的能耗,提高能源利用效率,符合现代工业制造对节能环保的要求。
基于PLC实现的三相异步电动机七段速调速实验学院:专业:学号:姓名:引言三相异步电动机的应用非常广泛,具有机构简单,效率高,控制方便,运行可靠,易于维修成本低的有点,几乎涵盖了工农业生产和人类生活的各个领域,在这些应用领域中,三相异步电动机运行的环境不同,所以造成其故障的发生也很频繁,所以要正确合理的利用它。
要合理的控制它。
这个系统的控制是采用PLC的编程语言--—-梯形图,梯形语言是在可编程控制器中的应用最广的语言,因为它在继电器的基础上加进了许多功能,使用灵活的指令,使逻辑关系清晰直观,编程容易,可读性强,所实现的功能也大大超过传统的继电器控制电路,可编程控制器是一种数字运算操作的电子系统,它是专为在恶劣工业环境下应用而设计,它采用可编程序的存储器,用来在内部存储执行逻辑运算,顺序控制,定时,计数和算术等操作的指令,并采用数字式,模拟式的输入和输出,控制各种的机械或生产过程。
长期以来,PLC始终处于工业自动化控制领域的主战场,为各种各样的自动化设备提供了非常可靠的控制应用,它能够为自动化控制应用提供安全可靠和比较完善的解决方案,适合于当前工业,企业对自动化的需要。
进入20世纪80年代,由于计算机技术和微电子技术的迅猛发展,极大地推动了PLC的发展,使得PLC的功能日益增强,目前,在先进国家中,PLC已成为工业控制的标准设备,应用面几乎覆盖了所有工业,企业.由于PLC综合了计算机和自动化技术,所以它发展日新月异,大大超过其出现时的技术水平,它不但可以很容易的完成逻辑,顺序,定时,计数,数字运算,数据处理等功能,而且可以通过输入输出接口建立与各类生产机械数字量和模拟量的联系,从而实现生产过程的自动化控制。
特别是超大规模集成电路的迅速发展以及信息,网络时代的到来,扩展了PLC的功能,使它具有很强的联网通讯能力,从而更广泛的运用于众多行业。
一、实验名称:基于PLC实现的三相异步电动机七段调速实验二、实验目的:1。
基于Plc控制电机调速实验报告电控学院电气0904班李文涛07 —、实验名称:基于PLC实现的三相异步电动机变频调速控制二、实验目的:通过综合实验,使学生对所学过的可编程控制器在电动机变频调速控制中的应用有一个系统的认识,并运用自己学过的知识,自己设计变频调速控制系统。
要求用PLC控制变频器,通过光电编码器反馈速度信号达到电动机调速的精确控制,自己设计,自己编程,最后进行硬件、软件联机的综合调试,实现自己的设计思想。
三、实验器材:220V PLC实验台一套、380V变频器实验台一套、万用表一个、导线若干三、实验各部分原理:1.实验主要器件原理1)光电编码器:光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
2)变频器:I原理概述变频调速能够应用在大部分的电机拖动场合,由于它能提供精确的速度控制,因此可以方便地控制机械传动的上升、下降和变速运行。
变频应用可以大大地提高工艺的高效性(变速不依赖于机械部分),同时可以比原来的定速运行电机更加节能,变频器的主电路大体上可分为两类:电压型是将电压源的直流变换为交流的变频器,直流回路的滤波是电容;电流型是将电流源的直流变换为交流的变频器,其直流回路滤波石电感。
矢量控制:U/f控制方式建立于电机的静态数学模型,因此,动态性能指标不高。
对于对动态性能要求较高的应用,可以采用矢量控制方式。
矢量控制的基本思想是将异步电动机的定子电流分解为产生磁场的电流分量(励磁电流)和与其相垂直的产生转矩的电流分量(转矩电流),并分别加以控制。
由于在这种控制方式中必须同时控制异步电动机定子电流的幅值和相位,即控制定子电流矢量,这种控制方式被称为矢量控制(Vectory Control)。
• 142•变频器是一种电压、频率变换设备,是将定频的交流电变换成电压、频率连续可调的交流电,从而供给电动机运转及调速使用。
实际生产中变频器常用于三相交流异步电动机的调速。
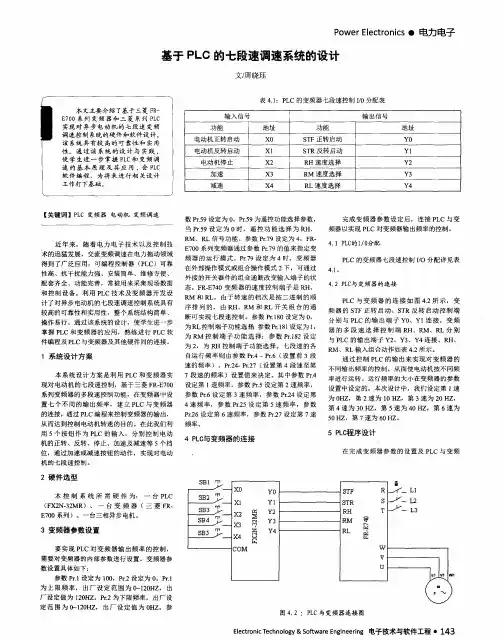
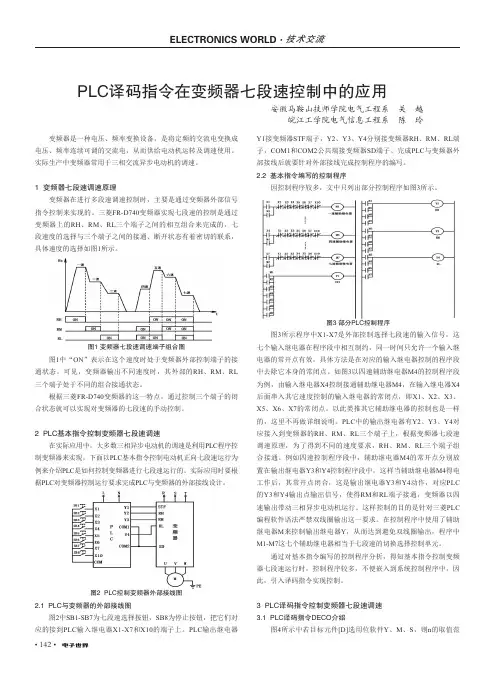
1 变频器七段速调速原理变频器在进行多段速调速控制时,主要是通过变频器外部信号指令控制来实现的。
三菱FR-D740变频器实现七段速的控制是通过变频器上的RH 、RM 、RL 三个端子之间的相互组合来完成的,七段速度的选择与三个端子之间的接通、断开状态有着密切的联系,具体速度的选择如图1所示。
图1 变频器七段速调速端子组合图图1中“ON ”表示在这个速度时处于变频器外部控制端子的接通状态。
可见,变频器输出不同速度时,其外部的RH 、RM 、RL 三个端子处于不同的组合接通状态。
根据三菱FR-D740变频器的这一特点,通过控制三个端子的闭合状态就可以实现对变频器的七段速的手动控制。
2 PLC基本指令控制变频器七段速调速在实际应用中,大多数三相异步电动机的调速是利用PLC 程序控制变频器来实现,下面以PLC 基本指令控制电动机正向七段速运行为例来介绍PLC 是如何控制变频器进行七段速运行的。
实际应用时要根据PLC 对变频器控制运行要求完成PLC 与变频器的外部接线设计。
图2 PLC控制变频器外部接线图2.1 PLC与变频器的外部接线图图2中SB1-SB7为七段速选择按钮,SB8为停止按钮,把它们对应的接到PLC 输入继电器X1-X7和X10的端子上。
PLC 输出继电器Y1接变频器STF 端子,Y2、Y3、Y4分别接变频器RH 、RM 、RL 端子,COM1和COM2公共端接变频器SD 端子。
完成PLC 与变频器外部接线后就要针对外部接线完成控制程序的编写。
2.2 基本指令编写的控制程序因控制程序较多,文中只列出部分控制程序如图3所示。
图3 部分PLC控制程序图3所示程序中X1-X7是外部控制选择七段速的输入信号,这七个输入继电器在程序段中相互制约,同一时间只允许一个输入继电器的常开点有效,具体方法是在对应的输入继电器控制的程序段中去除它本身的常闭点。
摘要随着工业控制要求的发展,对电机速度的控制越来越高。
传统的模拟信号控制方式存在抗干扰能力差、对设备要求复杂、控制精度不高等问题,难以适应日益复杂的工业环境。
本文主要介绍了多段调速系统的结构,并完成了以PLC为控制器,以增量式光电编码器为速度采集的闭环PID控制系统,通过RS-485对变频器的控制实现了三相异步电机的多段调速。
关键字:PLC;RS-485;多段调速;光电编码器AbstractWith the requirements of the development of industrial control, the speed of motor control is more and more strict. The traditional analog signal control mode has poor capacity of resisting disturbance, the requirement of complex equipment, the control precision low and some other problems, it is difficult to adapt to the increasingly complex industrial environment. In this article, mainly introduces the structure of various speed system, and completed the closed loop PID control system through the PLC as controller and incremental photoelectric encoder for speed acquisition, achieve the multistage speed control three-phase asynchronous motor through Frequency converter based on RS-485.Key words: PLC; RS-485; multistage speed; encoder目录第一章概述 (4)1.1 课题研究的背景及意义 (4)1.2 课题研究现状 (5)1.3 本课题研究的主要内容 (6)第二章系统分析 (7)2.1 PLC基本知识 (7)2.1.1 PLC的基本功能 (8)2.1.2 PLC的特点 (9)2.1.3 PLC的展望 (11)2.2 变频器基本知识 (12)2.2.1 变频器的应用 (12)2.2.2 变频器的分类 (13)2.2.3 变频器控制的展望 (14)2.3 光电编码器 (15)2.3.1 增量式编码器 (15)2.3.2 绝对式编码器 (16)第三章系统设计 (19)3.1 总体方案 (19)3.2 硬件设计 (19)3.2.1 变频器的连接 (20)3.2.2 光电编码器的配置 (20)3.2.3 PLC输入输出口分配 (21)3.3 软件设计 (21)3.3.1 变频器的参数设置 (22)3.3.2 PLC的设计 (23)第四章结论 (28)结束语 (29)致谢 (30)参考文献 (31)第一章概述1.1 课题研究的背景及意义随着计算机技术、电子技术的不断进步,PLC(可编程逻辑控制器)技术、变频(变频器)调速技术的发展极为迅速,已渗透到各个领域,以它们为主导的现代生产技术正以史无前例的速度迅猛发展。
基础课程设计(论文)基于PLC的可逆变三相异步电机调速系统学生姓名:指导教师:学生学号:专业:信息技术学院电气工程系年月日摘要近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速范围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,需要满足生产过程自动化系统各种不同的特殊要求,从而对直流电机提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足现代科技的要求,这是通过PWM方式控制直流电机调速的方法就应运而生。
采取传统的调速系统主要有以下的缺陷:模拟电路容易随时间飘移,会产生一些不必要的热损耗,以及对噪声敏感等。
而用PWM技术后,避免上述的缺点,实现了数字式控制模拟信号,可以大幅度减低成本和功耗。
并且PWM 调速系统开关频率较高,仅靠电枢电感的滤波作用就可以获得平滑的直流电流,低速特性好;同时,开关频率高,快响应特性好,动态抗干扰能力强,可获很宽的频带;开关元件只需工作在开关状态,主电路损耗小,装置的效率高,具有节约空间、经济好等特点。
本系统已STC89C52单片机为核心,通过内部定时器产生PWM波形,控制LN298大功率H桥路驱动直流电机已达到控制转速的目的。
通过数码管将速度等级显示出来,此外可以通过按键控制电机的正传反转、以及电机速度加和减。
关键词:STC89C52;单片机;PWM调速;数码管显示;按键ABSTRACTIn recent years, with the progress of science and technology, the DC motor has been used more and more widely, DC has excellent speed characteristics, speed smooth, convenient, wide speed range, strong overload capacity, able to withstand the impact of frequent load, extremely fast starting, braking and reverse can be realized without frequent, need to meet the specific requirements of various the production process automation system is different, so as to put forward a higher request to the DC motor, the armature circuit resistance speed change, to change the voltage control technique can't meet the requirements of modern science and technology, it is through the PWM mode control DC motor speed will emerge as the times require.Take the traditional speed regulation system mainly has the following defects: analog circuit is easy to drift over time, will produce some unnecessary heat loss, and sensitive to noise. Using PWM technology, to avoid the disadvantages, realization of the digital control of analog signal, can greatly reduce the cost and power consumption. And the higher switching frequency PWM speed control system, filtering effect can be obtained by armature inductance DC current smooth, good low-speed performance; at the same time, high switching frequency, fast dynamic response characteristics of a good, strong anti-interference ability, can obtain a wide frequency band; the switching element only needs to work in the state of the switch, the main circuit loss, the efficiency of the device is high, has the characteristics of saving space, economy etc..The system is STC89C52 microcontroller as the core, PWM waveform generated by the internal timer, control LN298 high power H bridge drive DC motor has to control the speed of the. Through the digital tube display speed grade, also can through the button control motor story of inversion, and the motor speed to add and subtract.Keywords: STC89C52; MCU; PWM control; digital tube display key;目录摘要 (I)1 绪论 (1)2 变频调速系统的方案确定 (1)2.1变频调速系统 (3)2.2系统的控制要求 (3)2.3方案的确定 (3)3 变频调速系统的硬件设计 (4)3.1S7-200PLC (4)3.2M ICRO M ASTER420变频器 (4)3.3外部电路设计 (4)4 变频调速系统的软件设计 (13)4.1编程软件的介绍 (13)4.2变频调速系统程序设计 (14)结论 (17)参考文献 (17)1 绪论1.1课题研究的背景近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速范围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,需要满足生产过程自动化系统各种不同的特殊要求,从而对直流电机提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足现代科技的要求,这是通过PWM方式控制直流电机调速的方法就应运而生。
综合实验实验报告实验名称:基于PLC实现的电动机调速控制基于PLC实现的电动机调速控制实验报告一、实验目的:通过综合实验的训练,学会独立的设计和处理问题的能力二、实验原理:1.PLC编程控制原则2.PLC工作手册3.光电编码器原理图三、实验步骤:1.设计答疑2.绘制系统原理图,接线图,系统流程图3.编写系统程序,调制4.按图接线,实现设计要求5.绘制各元件及PLC、变频器、编码器接线端口明细表四、实验器材本实验提供的元器件:PLC一台、变频器一台、三相电机一台、光电编码器五、实验要求效果六、实验结果报告1.系统原理图2.PLC与变频器接线3.接线图4.程序流程图开始正转/反转加 速=30HZ ?匀速5s加 速=50HZ ?匀速5s减 速匀速5s结 束=30HZ ?光电编码器光电编码器YYYNNN光电编码器5.PLC设置序号功能码功能定义设定值1 F100 用户密码82 F140 端子方向启动 13 F200 启动控制 14 F202 停机控制 15 F204 基本调速方式 26 F206 方向给定 27 F400 OP1端子输入信号08 F401 OP2端子输入信号09 F402 OP3端子输入信号010 F403 OP4端子输入信号011 F404 OP5端子输入信号012 F405 OP6端子输入信号013 F406 OP7端子输入信号014 F407 OP8端子输入信号015 F408 OP1功能设定1116 F409 OP2功能设定017 F410 OP3功能设定 118 F411 OP4功能设定1219 F412 OP5功能设定1320 F413 OP6功能设定1421 F414 OP7功能设定722 F415 OP8功能设定176.编码器原理图7.程序七、实验心得(见附页)。
基于PLC变频器三相异步电动机正反的控制PLC(可编程逻辑控制器)是一种用于自动化控制的电子设备,可通过编程来控制各种机械设备和工业流程。
变频器是一种用于控制电机转速的设备,可以通过改变输入电压和频率来改变电动机的转速。
三相异步电动机是一种常用的工业电动机,可以根据输入电源的频率和电压来实现正反转运行。
在基于PLC变频器的控制系统中,可以使用PLC来控制变频器的输出频率和电压,从而控制电动机的正反转运行。
具体的控制原理如下:1. 硬件连接:将PLC和变频器连接起来。
通过PLC的数字输出口,将控制信号传输给变频器的控制端口。
然后,将变频器的输出端口与三相异步电动机的输入端口相连接。
2. PLC编程:在PLC中,通过编写程序来实现控制电动机正反转运行。
需要定义变量来保存电机的状态信息,例如正转、反转或停止状态。
然后,通过读取输入端口的信号,检测电机当前的状态,并根据需要改变电机的状态。
当PLC接收到正转信号时,可以向变频器发送指令,使电动机以正转方式运行。
还可以在PLC程序中添加其他功能,例如监测电动机的运行状态、保护电动机免受过载和短路等故障,以及实现电动机运行相关的逻辑控制。
3. 参数设置:在使用PLC控制变频器和电动机之前,需要对变频器进行参数设置。
这些参数包括变频器的输出频率范围、启动和停止时间、最大和最小转速等。
通过合理设置这些参数,可以确保电动机在正反转运行过程中遵循设计要求。
基于PLC变频器的控制系统具有控制精度高、稳定性好、可靠性高等优点。
在工业自动化领域中得到了广泛应用。
通过合理配置PLC程序和参数设置,可以实现对三相异步电动机的正反转运行控制,满足不同的工业应用需求。
基于Plc控制电机调速实验报告电控学院电气0904班李文涛0906060427—、实验名称:基于PLC实现的三相异步电动机变频调速控制二、实验目的:通过综合实验,使学生对所学过的可编程控制器在电动机变频调速控制中的应用有一个系统的认识,并运用自己学过的知识,自己设计变频调速控制系统。
要求用PLC控制变频器,通过光电编码器反馈速度信号达到电动机调速的精确控制,自己设计,自己编程,最后进行硬件、软件联机的综合调试,实现自己的设计思想。
三、实验器材:220V PLC实验台一套、380V变频器实验台一套、万用表一个、导线若干三、实验各部分原理:1.实验主要器件原理1)光电编码器:COM01030002040CH光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号;通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
2)变频器:I原理概述变频调速能够应用在大部分的电机拖动场合,由于它能提供精确的速度控制,因此可以方便地控制机械传动的上升、下降和变速运行。
变频应用可以大大地提高工艺的高效性(变速不依赖于机械部分),同时可以比原来的定速运行电机更加节能,变频器的主电路大体上可分为两类:电压型是将电压源的直流变换为交流的变频器,直流回路的滤波是电容;电流型是将电流源的直流变换为交流的变频器,其直流回路滤波石电感。
矢量控制:U/f控制方式建立于电机的静态数学模型,因此,动态性能指标不高。
对于对动态性能要求较高的应用,可以采用矢量控制方式。
矢量控制的基本思想是将异步电动机的定子电流分解为产生磁场的电流分量(励磁电流)和与其相垂直的产生转矩的电流分量(转矩电流),并分别加以控制。
基于PLC实现的三相异步电动机七段速调速实验学院:专业:学号:姓名:引言三相异步电动机的应用非常广泛,具有机构简单,效率高,控制方便,运行可靠,易于维修成本低的有点,几乎涵盖了工农业生产和人类生活的各个领域,在这些应用领域中,三相异步电动机运行的环境不同,所以造成其故障的发生也很频繁,所以要正确合理的利用它。
要合理的控制它。
这个系统的控制是采用PLC的编程语言----梯形图,梯形语言是在可编程控制器中的应用最广的语言,因为它在继电器的基础上加进了许多功能,使用灵活的指令,使逻辑关系清晰直观,编程容易,可读性强,所实现的功能也大大超过传统的继电器控制电路,可编程控制器是一种数字运算操作的电子系统,它是专为在恶劣工业环境下应用而设计,它采用可编程序的存储器,用来在内部存储执行逻辑运算,顺序控制,定时,计数和算术等操作的指令,并采用数字式,模拟式的输入和输出,控制各种的机械或生产过程。
长期以来,PLC始终处于工业自动化控制领域的主战场,为各种各样的自动化设备提供了非常可靠的控制应用,它能够为自动化控制应用提供安全可靠和比较完善的解决方案,适合于当前工业,企业对自动化的需要。
进入20世纪80年代,由于计算机技术和微电子技术的迅猛发展,极大地推动了PLC的发展,使得PLC的功能日益增强,目前,在先进国家中,PLC 已成为工业控制的标准设备,应用面几乎覆盖了所有工业,企业。
由于PLC综合了计算机和自动化技术,所以它发展日新月异,大大超过其出现时的技术水平,它不但可以很容易的完成逻辑,顺序,定时,计数,数字运算,数据处理等功能,而且可以通过输入输出接口建立与各类生产机械数字量和模拟量的联系,从而实现生产过程的自动化控制。
特别是超大规模集成电路的迅速发展以及信息,网络时代的到来,扩展了PLC的功能,使它具有很强的联网通讯能力,从而更广泛的运用于众多行业。
一、实验名称:基于PLC实现的三相异步电动机七段调速实验二、实验目的:1. 通过电动机变频调速控制系统实验,进一步了解可编程控制器在电动机变频调速控制中的应用。
2. 通过系统设计,进一步了解PLC、变频器及编码器之间的配合关系。
3. 通过实验线路的设计,实际操作,使理论与实际相结合,增加感性认识,使书本知识更加巩固。
4. 培养动手能力,增强对可编程控制器运用的能力。
5. 培养分析,查找故障的能力。
6. 增加对可编程控制器外围电路的认识。
三、实验器件:220V PLC实验台一套、380V变频器实验台一套、三相电动机一台(Nr=1400r/min,p=2)、光电编码器一个(864p/r)、万用表一个、导线若干。
四、实验原理:1.实验原理图:2.实验原理:通过光电编码器将电动机的转速采集出来并送入PLC中,通过实验程序将采集到的信息与DM3X(加速)/DM4X(减速)区的设定值进行比较,当频率满足设定值时用PLC控制变频器(变频器工作在端子调速模式下),电动机停止加速,保持匀速5S,5S后PLC控制变频器加速端子继续加速。
从而实现完成七段速逐段加速。
以15HZ为基准加速频率上限为45Hz(可以根据具体情况设定),并在最高段速保持10s,此后电机开始减速,当到达设定的频率时,PLC控制变频器停止加速,保持匀速5S,5S后PLC控制变频器减速端子继续减速;反转的运动过程与正转正转过程相似。
实验速度曲线如下图:五、实验相关器件特点:1.欧姆龙CPM2AH:CPM2A在一个小巧的单元内综合有各种性能,包括同步脉冲控制,中断输入,脉冲输出,模拟量设定,和时钟功能等。
CPM2A CPU单元又是一个独立单元,能处理广泛的机械控制应用,所以它是在设备内用作内装控制单元的理想产品,完整的通信功能保证了与个人计算机、其它OMRON PC和OMRON可编程终端的通信。
这些通信能力使用户能设计一个经济的分布生产系统。
CPM2A计有五个高速计数器输入。
一个响应频率为20 kHz/5 kHz的高速计数器输入,与四个响应频率为2 kHz的高速计数器输入(在计数器方式下)。
高速计数器可以用在四种输入方式中的任一种下;微分相位方式(5 kHz),脉冲+方向输入方式(20 kHz),增/减脉冲方式(20 kHz),或递增方式(20 kHz)。
当计数与一设置值匹配或下降在一规定范围内时,能触发中断。
中断输入(计数器方式)可用递增计数器或递减计数器(2 kHz)并在计数与目标值匹配时触发中断(执行中断程序)。
2.光电编码器:光电编码器,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
这是目前应用最多的传感器,光电编码器是由光栅盘和光电检测装置组成。
光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。
由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
此外,为判断旋转方向,码盘还可提供相位相差90º的两路脉冲信号。
3.变频器:()变频器可以分为四个部分。
通用变频器由主电路和控制回路组成。
给异步电动机提供调压调频电源的电力变换部分,称为主电路。
主电路包括整流器、中间直流环节(又称平波回路)、逆变器。
⑴整流器。
它的作用是把工频电源变换成直流电源。
⑵平波回路(中间直流环节)。
由于逆变器的负载为异步电动机,属于感性负载。
无论电动机处于电动状态还是发电状态,起始功率因数总不会等于1。
因此,在中间直流环节和电动机之间总会有无功功率的交换,这种无功能量要靠中间直流环节的储能元件—电容器或电感器来缓冲,所以中间直流环节实际上是中间储能环节。
⑶逆变器。
与整流器的作用相反,逆变器是将直流功率变换为所要求频率的交流功率。
逆变器的结构形式是利用6个半导体开关器件组成的三相桥式逆变器电路。
通过有规律的控制逆变器中主开关的导通和断开,可以得到任意频率的三相交流输出波形。
⑷控制回路。
控制回路常由运算电路,检测电路,控制信号的输入、输出电路,驱动电路和制动电路等构成。
其主要任务是完成对逆变器的开关控制,对整流器的电压控制,以及完成各种保护功能。
控制方式有模拟控制或数字控。
六、各器件参数设置:1.变频器参数设置:2.内部寄存器参数设置:3.编码器接口:4.PLC端口配置:七、实验结论:按照原理图接好线经检查无误后,上电下载编好的程序,并在编程模式下,打开PLC的内存,在DM数据区从DM30~DM36依次写入0242、0336、0420、0504、0588、0672、0770七个加速比较的十六进制数据,DM40~DM46依次写入0780、0730、0650、0560、0470、0370、0270七个减速比较的十六进制数据,并在DM6642 数据区写入0112,设置高速计数器工作模式。
之后保存并在线传送到PLC,再将PLC切换到运行模式。
按下正转按钮后,变频器启动运行电动机正转加速,频率达到每一个阶梯后延时5秒再加速,在45Hz左右后,开始减速,减速到停止;反转类似于正转。
当按下停止按钮后,变频器停止工作电机停止转动。
电机匀速的频率为:5.42Hz、14.89Hz、25.04Hz、35.26Hz、46.03Hz。
比较接近预期值,符合实验要求。
八、力控PLC变频器监控平台1、I/O设备组态(采用host link协议)2、力控数据库组态3、监控平台4、运行结果图图1 加速过程图2 减速过程九、程序流程图及程序清单1,流程图2、梯形图程序LD P_OnOUT 200.00LD 200.00 ANDNOT TIM000 TIM 000 #1LD TIM000PRV(62) 0 0 DM0 LDNOT TIM000 DIFU(13) 200.01LD 200.01OUT 252.00LD 200.10OR 203.07OR 200.08 ANDNOT 200.03 ANDNOT 203.00 OUT 203.07LD 200.00OUT TR0AND 203.07CMP(20) DM30 DM0 LD TR0LD P_LTOR P_EQANDLDOUT 201.00LD 201.00OR 203.00 ANDNOT 200.03 ANDNOT 203.01 OUT 203.00LD 203.00OR 204.05OUT 208.00LD 203.01OR 204.04OUT 208.01LD 203.02OR 204.03OUT 208.02LD 203.03OR 204.02 OUT 208.03LD 203.04OR 204.01OUT 208.04LD 203.05OR 204.00OUT 208.05LD 200.00OUT TR0AND 203.00CMP(20) DM31 DM0 LD TR0LD P_LTOR P_EQANDLDOUT 201.01LD 201.01OR 203.01 ANDNOT 200.03 ANDNOT 203.02 OUT 203.01LD 200.00OUT TR0AND 203.01CMP(20) DM32 DM0 LD TR0LD P_LTOR P_EQANDLDOUT 201.02LD 201.02OR 203.02 ANDNOT 200.03 ANDNOT 203.03 OUT 203.02LD 200.00OUT TR0AND 203.02CMP(20) DM33 DM0 LD TR0LD P_LTOR P_EQPLC变频器调速程序清单ANDLDOUT 201.03LD 201.03OR 203.03 ANDNOT 200.03 ANDNOT 203.04 OUT 203.03LD 200.00OUT TR0AND 203.03CMP(20) DM34 DM0 LD TR0LD P_LTOR P_EQANDLDOUT 201.04LD 201.04OR 203.04 ANDNOT 200.03 ANDNOT 203.05 OUT 203.04LD 200.00OUT TR0AND 203.04CMP(20) DM35 DM0 LD TR0LD P_LTOR P_EQANDLDOUT 201.05LD 201.05OR 203.05 ANDNOT 200.03 ANDNOT 203.06 OUT 203.05LD 200.00OUT TR0AND 203.05CMP(20) DM36 DM0 LD TR0LD P_LTOR P_EQANDLDOUT 201.06 LD 201.06OR 203.06 ANDNOT TIM004 ANDNOT 200.03 OUT 203.06LD 203.06TIM 004 #100 LD 201.00OR 201.01OR 201.02OR 201.03OR 201.04OR 201.05OR 201.10 ANDNOT TIM001 OUT 201.10LD 0.03OR 206.00OUT 200.10LD 200.10OR 201.08OR 200.08 ANDNOT 200.03 OUT 201.08LD 201.08OUT 11.01LD 0.07OR 206.02OUT 200.03LD 200.03OUT 10.06LD 200.10OR 200.04 ANDNOT 200.03 ANDNOT 200.09 OUT 200.04LD 200.04OUT 11.02LD 200.04OR 200.09 ANDNOT 200.05 ANDNOT 203.06 ANDNOT 210.00 OUT 10.04OUT 206.03LD 201.10OR 201.12OR 200.05 ANDNOT TIM001 OUT 200.05LD 200.05TIM 001 #50LD TIM004OR 210.00 ANDNOT 200.03 OUT 210.00LD TIM004OR 210.01 ANDNOT 204.00 ANDNOT 200.03 OUT 210.01LD 210.00OUT TR0AND 210.01CMP(20) DM40 DM0 LD TR0LD P_GTOR P_EQANDLDOUT 202.00LD TR0AND P_LTOUT 205.00LD 202.00OR 204.00 ANDNOT 200.03 ANDNOT 204.01 OUT 204.00LD 210.00OUT TR0AND 204.00CMP(20) DM41 DM0 LD TR0LD P_GTOR P_EQANDLDOUT 202.01LD TR0 AND P_LTOUT 205.01LD 202.01OR 204.01 ANDNOT 200.03 ANDNOT 204.02 OUT 204.01LD 210.00OUT TR0AND 204.01CMP(20) DM42 DM0 LD TR0LD P_GTOR P_EQANDLDOUT 202.02LD TR0AND P_LTOUT 205.02LD 202.02OR 204.02 ANDNOT 200.03 ANDNOT 204.03 OUT 204.02LD 210.00OUT TR0AND 204.02CMP(20) DM43 DM0 LD TR0LD P_GTOR P_EQANDLDOUT 202.03LD TR0AND P_LTOUT 205.03LD 202.03OR 204.03 ANDNOT 200.03 ANDNOT 204.04 OUT 204.03LD 210.00OUT TR0AND 204.03CMP(20) DM44 DM0 LD TR0LD P_GTOR P_EQANDLDOUT 202.04LD TR0AND P_LTOUT 205.04LD 202.04OR 204.04 ANDNOT 200.03 ANDNOT 204.05 OUT 204.04LD 210.00OUT TR0AND 204.04CMP(20) DM45 DM0 LD TR0LD P_GTOR P_EQANDLDOUT 202.05LD TR0AND P_LTOUT 205.05LD 202.05OR 204.05 ANDNOT 200.03 ANDNOT 204.06 OUT 204.05 LD 210.00OUT TR0AND 204.05CMP(20) DM46 DM0LD TR0LD P_GTOR P_EQANDLDOUT 202.06LD TR0AND P_LTOUT 205.06LD 202.06OR 204.06ANDNOT 200.03ANDNOT TIM005OUT 204.06LD 204.06TIM 005 #50LD 202.01OR 202.02OR 202.03OR 202.04OR 202.05OR 201.12ANDNOT TIM002ANDNOT 200.03OUT 201.12LD 201.12TIM 002 #50LD TIM002OR 200.06OR TIM004OR 205.00OR 205.02OR 205.01OR 205.03OR 205.04OR 205.05OR TIM005OR 205.06ANDNOT 200.03ANDNOT 200.05ANDNOT 202.06OUT 200.06LD 200.06ANDNOT 200.05OUT 10.05OUT 206.04LD 0.06OR 206.01ANDNOT 200.03OUT 200.08LD 200.08OR 200.09ANDNOT 200.04ANDNOT 200.03OUT 200.09LD 200.09OUT 11.03END(01)。