西门子PLC 三相异步电动机的制动控制
- 格式:ppt
- 大小:1.44 MB
- 文档页数:27
摘要三相异步电动机是一种适用范围广,使用方便的通用电机,其主要动力的来源,应用于生产,生活各个领域。
三相异步电动机的启停会对电网造成较强干扰,尤其在工业领域中的重载启动,有时也可能对设备构成严重威。
所谓电器制动,就是电动机需要制动时,通过电路的转换或改变供电条件使其产生与实际运转方向相反的电磁转矩——制动力矩,迫使电动机迅速停止转动的制动方式,所以随着技术的高速发展,电动机的启停与制动受到越来越多的运用。
关键词:三相异步电动机电气制动重载启动。
目录摘要 (I)1前言 (1)2反接制动控制设计内容 (2)2.1 正反转反接制动控制 (2)单向反接制动控制 (4)采用角-星制动反接制动控制 (6)3电路中的元器件 (8)热继电器 (8)低压断路器 (8)交流接触器 (9)刀开关 (9)组合开关 (10)速度继电器 (10)熔断器 (10)4反接制动控制电路仿真 (11)异步电机反接制动控制仿真 (11)角-星制动反接制动控制仿真 (12)心得体会 (13)参考文献 (14)1前言在现代科技发展快速的时代电动机的运用越来越广泛越来越科学。
反接制动是电动机电气制动方法之一,此种方法有制动力大,制动迅速的优点,多用在停止动作要求准确的机械设备控制电路。
反接制动的实质是改变异步电动机定子绕组中的三相电源相序,产生与转子转动方向相反的转矩,迫使电动机迅速停转。
其控制线路有单向反接制动控制线路和可逆运行反接制动控制线路。
交流电机制动采用改变相序的方法产生反向转矩,原理类似。
反接制动制动力强,制动迅速,控制电路简单,设备投资少,但制动准确性差,制动过程中冲击力强烈,易损坏传动部件。
三相异步电动机双向启动反接制动利用了三相异步电动机的正反转的主回路并且把控制回路增加了继电器进行制动。
反接制动的正反转是利用三相异步电动机的正反转是将电动机三相电源进线中的任意两相对调,就可以达到反转控制的目的。
2反接制动控制设计内容2.1 正反转反接制动控制电路原理见图,图中KMF 为正向接触器,KMR 为反向接触器。
三相异步电动机的制动方式
1. 电阻制动:在电动机的转子回转速度较高时,将一个电阻器串联在转子线圈中,形成一个阻性回路,使电流通过该回路从而产生制动转矩,使电机停转。
2. 反接制动:在线圈中交换两相电源的连接,使得转子的转向与定子磁通的转向相反,因而电动机产生制动转矩并停转。
3. 回馈制动:将电动机的两端接一段电阻,使电动机在运动中变为一个发电机,其产生的电磁功率由电阻转换成热能,从而产生制动转矩。
4. 机械制动:通过机械装置直接对电动机转子进行制动,例如手摇刹车,手摇轮等。
5. 内嵌制动:在电动机的转子内部设置了制动装置,当电机需要制动时,通过线路控制制动装置的启动,从而实现电动机的制动。

关于三相异步电动机的制动第一篇:关于三相异步电动机的制动关于三相异步电动机的制动一、三相异步电动机的反转二、三相异步电动机的制动一、三相异步电动机的反转只要改变旋转磁场的旋转方向,可使三相异步电动机的反转。
三相异步电动机的反转的方法:将三相异步电动机两相绕组与交流电源的接线互相对调,则旋转磁场的旋转方向反向,三相异步电动机反转。
二、三相异步电动机的制动制动的概念制动的方法一)制动的概念所谓制动,就是给电动机一个与转动方向相反的转矩使它迅速停转(或限制其转速)。
制动的方法一般有两类:机械制动和电气制动。
二)制动的方法制动的方法一般有两类:机械制动电气制动(一)机械制动利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
常用的方法:电磁抱闸制动。
1、电磁抱闸的结构2、电磁抱闸制动的特点1、电磁抱闸的结构:主要由两部分组成:制动电磁铁和闸瓦制动器。
制动电磁铁由铁心、衔铁和线圈三部分组成。
闸瓦制动器包括闸轮、闸瓦、杠杆和弹簧等,闸轮与电动机装在同一根转轴上。
断电制动型性能是:当线圈得电时,闸瓦与闸轮分开,无制动作用,当线圈失电是,闸瓦紧紧抱住闸轮制动。
通电制动型的性能是:当线圈得电时,闸瓦紧紧抱住闸轮制动;当线圈失电时,闸瓦与闸轮分开,无制动作用。
2、电磁抱闸制动的特点优点:电磁抱闸制动,制动力强,广泛应用在起重设备上。
它安全可靠,不会因突然断电而发生事故。
缺点:电磁抱闸体积较大,制动器磨损严重,快速制动时会产生振动。
(二)电气制动1、能耗制动2、反接制动3、回馈制动4、电容制动1、能耗制动能耗制动的原理能耗制动的特点1)能耗制动的原理:电动机切断交流电源后,转子因惯性仍继续旋转,立即在两相定子绕组中通入直流电,在定子中即产生一个静止磁场。
转子中的导条就切割这个静止磁场而产生感应电流,在静止磁场中受到电磁力的作用。
这个力产生的力矩与转子惯性旋转方向相反,称为制动转矩,它迫使转子转速下降。
当转子转速降至0,转子不再切割磁场,电动机停转,制动结束。
三相异步电动机制动方法一、动态制动(减速制动):动态制动是利用电动机自身的电磁特性,通过改变电动机的充电状态来实现制动的一种方法。
它通过外部去势的方式,使电动机电源断开,同时将电机的电源接到一个励磁回路中,使电动机以发电机的方式运行。
电动机实际上就像一个发电机,将电能转化为机械能,从而减慢电动机的转速,并实现制动效果。
这种制动方法可以快速而平稳地停止电动机的运动,适用于较大功率的电动机制动。
二、电阻制动:电阻制动是通过外接电阻器将电动机的转子电路改成绕组和电阻器串联的方式实现制动。
在制动过程中,电动机实际上是在电阻器的阻力作用下运行,电动机转子的旋转速度逐渐减慢,直到停止转动。
这种制动方法因为直接将电动机转子的电路改成电阻器,故造成了能量的浪费。
电阻制动适用于小功率的电动机制动。
三、反接制动:反接制动是将电动机的两个相互衔接的定子绕组并联接在一起,形成一个闭合路,通过改变回路的连接方式来实现制动。
在制动过程中,将电动机的接线转换为星型连接并短接两个绕组,实现电动机转子的制动。
这种制动方式简单可靠,适用于小功率的电动机制动。
四、反接充电制动:反接充电制动是通过将电动机接电源的两个相在一段时间内反过来接,使电动机变成发电机而实现制动。
在制动过程中,电动机的旋转能量被转换为电能,通过充电电阻器将电能回馈到电网中,从而实现制动效果。
这种制动方法适用于运行时间较短且制动次数较少的情况,可以减少能量的浪费。
五、电抱闸制动:电抱闸制动是通过外接电磁或气动抱闸装置将电动机的转子固定住,使电动机转子无法转动而实现制动。
电动机在制动过程中,当电抱闸装置加电时,抱闸器固定住电动机转子,阻止转子转动。
这种制动方法简单可靠,制动效果好,适用于较大功率的电动机制动。
综上所述,三相异步电动机的制动方法有动态制动、电阻制动、反接制动、反接充电制动和电抱闸制动。
根据具体的运行要求和电动机的功率,选择合适的制动方法可以实现电动机的安全、高效地制动。
三台电动机顺序启停PLC控制编程摘要:电工技能鉴定分为五级考核,职业院校高职学生的应届生考核三级(高级工),电工鉴定分为理论考试和技能考试。
其中技能考试主要考核对继电接触器控制系统、PLC控制系统、电子电路、变频器控制等的安装、调试、故障排除为主,其中PLC控制系统安装与调试题目中三台电动机的顺序启停PLC控制为高频题目。
关键词:电工鉴定;技能考核;电机顺序启停;PLC控制;编程本文将以西门子S7-200PLC机为例讲解三台电动机的顺序启停PLC控制的编程方法。
控制要求如下:某一生产线的末端有一台三级皮带传送机,分别由M1、M2、M3三台电动机拖动,启动时要求10s的时间间隔,并按M1、M2、M3的顺序启动;停止时按15s的时间间隔,并按M3、M2、M1的顺序停止,皮带传送机的启动和停止分别由启动按钮和停止按钮来控制,三级皮带传送机如下图所示。
要求:1.工作方式设置:手动时要求按下手动启动按钮,做一次上述过程,自动时按下自动启动按钮,能够重复循环上述过程。
2.有必要的电气保护和互锁。
PLC设计步骤如下:一、输入/输出分析:该控制要求中有3个被控设备MM1、KM2、KM3,分别用于控制电动机M1、M2和M3,也就是输出设备;而输入设备有三个,分别是手动启动按钮SB1、手动停止按钮SB2、自动启动按钮SB3三个。
二、I/O地址分配三、PLC外部接线图1.主电路:主电路组成:三相电分别通过熔断器FU1之后分三路又分别经过主控交流接触器KM1、KM2和KM3的主触点并分别经过热继电器FR1、FR2、FR3的热元件来分别控制传送机使用的三台电动机M1、M2和M3,其中KM1、KM2、KM3的主触点分别用于控制三台电动机的通电与断电;三支熔断器FU1用作主电路的短路保护,热继电器FR1、FR2、FR3分别用作三台电动机M1、M2、M3的过载保护。
同时其中的一相和零线给S7-200PLC主机供电,FU2用作控制电路的短路保护。
三相异步电动机制动方式
三相异步电动机的制动方式主要有以下几种:
1. 直接制动:即电动机的定子绕组通电,但转子不转动。
这种制动方式适用于制动时需要较大的制动力矩的情况,如电梯制动等。
2. 动态制动:将电动机的定子绕组接通外部电阻或电抗,使电动机减速至停止。
动态制动又分为旁路制动和串联制动两种方式。
旁路制动是将外部电阻或电抗与电动机的定子绕组并联,串联制动则是将外部电阻或电抗与电动机的定子绕组串联。
动态制动的优点是可以调整制动力矩,适用于制动时需要提供可调制动力矩的情况。
3. 动态制动加感应制动:将动态制动的电阻或电抗与电动机的定子绕组并联,同时通过感应制动装置将电动机的定子绕组接入外部电抗,从而实现制动。
这种制动方式不仅可以提供较大的制动力矩,还可以实现能量回收,提高能量利用率。
综上所述,三相异步电动机的制动方式多种多样,可以根据具体要求选择合适的制动方式。
三相异步电动机的制动控制(上)电动机断开电源后,因惯性作用经过一段时间后才会完全停下来。
对于某些生产机械的控制,这种情况是不适宜的,所以有时要对电动机进行制动。
所谓制动,是指在切断电动机电源后使它迅速停转而采取的措施。
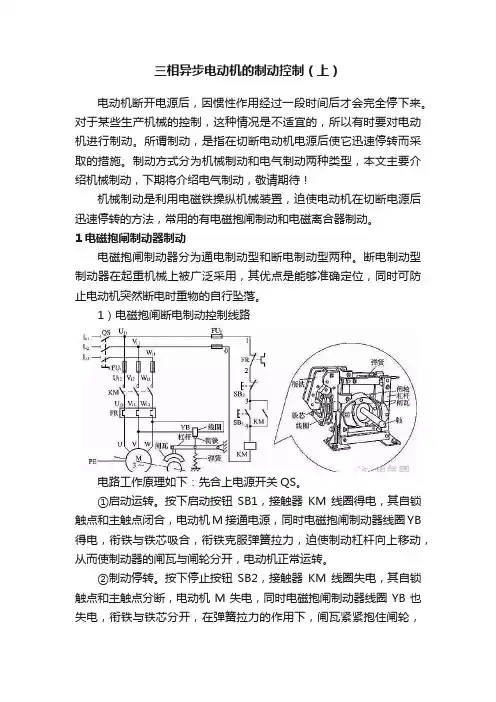
制动方式分为机械制动和电气制动两种类型,本文主要介绍机械制动,下期将介绍电气制动,敬请期待!机械制动是利用电磁铁操纵机械装置,迫使电动机在切断电源后迅速停转的方法,常用的有电磁抱闸制动和电磁离合器制动。
1电磁抱闸制动器制动电磁抱闸制动器分为通电制动型和断电制动型两种。
断电制动型制动器在起重机械上被广泛采用,其优点是能够准确定位,同时可防止电动机突然断电时重物的自行坠落。
1)电磁抱闸断电制动控制线路电路工作原理如下:先合上电源开关QS。
①启动运转。
按下启动按钮SB1,接触器KM线圈得电,其自锁触点和主触点闭合,电动机M接通电源,同时电磁抱闸制动器线圈YB 得电,衔铁与铁芯吸合,衔铁克服弹簧拉力,迫使制动杠杆向上移动,从而使制动器的闸瓦与闸轮分开,电动机正常运转。
②制动停转。
按下停止按钮SB2,接触器KM线圈失电,其自锁触点和主触点分断,电动机M失电,同时电磁抱闸制动器线圈YB也失电,衔铁与铁芯分开,在弹簧拉力的作用下,闸瓦紧紧抱住闸轮,使电动机被迅速制动而停转。
当重物起吊到需要高度时,按下停止按钮,电动机和电磁抱闸制动器的线圈同时断电,闸瓦立即抱住闸轮,电动机立即制动停转,重物随之被准确定位。
如果电动机在工作时,线路发生故障而突然断电时,电磁抱闸制动器同样会使电动机迅速制动停转,从而避免重物自行坠落。
因为电磁抱闸制动器线圈耗电时间与电动机通电时间一样长,所以这种制动方法并不经济;另外切断电源后,由于电磁抱闸制动器的制动作用,手动调整工件就很困难。
因此,对要求电动机制动后能调整工件位置的机床设备不能采用这种制动方法,可采用通电制动控制线路。
2) 电磁抱闸通电制动控制线路此种通电制动与上述断电制动方法稍有不同。

三相异步电动机降压启动与能耗制动plc控制新疆大学实习(实训)报告实习(实训)名称:电气控制与PLC综合实践学院:电气工程学院专业、班级:电气12-3班指导教师:努尔哈孜娄毅报告人:宋文峰学号:20122101218时间:2015年6月24日--7月5日实验部分1三相异步电动机正反转的PLC控制实验1.1 实验目的1. 了解实验线路中各个设备和元器件的结构,工作原理及使用方法。
2. 通过对三相异步电动机正反转控制线路的接线,掌握由电路原理图接成实际操作电路的方法。
3. 掌握三相异步电动机正反转控制线路的工作原理和接线方法。
4. 熟悉线路故漳的分析及排除故障的方法。
1.2 实验设备1、FX2N系列可编程序控制器主机;2、计算机一台;3、编程软件SWOPC-FXGP;4、电机一台;继电器4个导线若干。
1.3 设计要求按下按钮SB1电机启动,经过五秒后给电机断电两秒,之后电机自行启动并转向发生变化,按此过程循环,再按一下按钮SB1,电机停止运行。
1.4设计思想要想实现三项异步电机的正反转只需改变其任意的两项。
可以用PLC通过对继电器的控制来控制电机的转向。
例如,当PLC使控制正转的继电器的线圈通电,使得其常开触点接通,从而使得电路中的正传线路与电机接触,实现正转。
在电路换向和电机连接方式转换过程中,有可能产生的两个接触器瞬间同时工作引起安全隐患的问题,所以需要考虑在转换电机运行状态时,需要加入一定的时间,来确保避免此类事件的发生。
1.5硬件设计通过对上述内容的分析,可以确定有一个输入,两个输出。
表1-1 PLC I/O地址分配表1.6异步电机的主电路图实验的主电路图如图1-1所示:图1-1 三相异步电机正反转控制实验的主电路图KM1是继电器1的常开触点,用来控制电机的正转;KM2是继电器2的常开触点,用来控制电机的反转。
1.7程序设计实验梯形图设计如下:图1-2 三相异步电动机正反转控制梯形图1.8 总结电机正反转在工业的各个领域中平凡的出现,那么控制其方法也就有多种,例如常规继电器控制,PWM技术控制,PLC技术控制与他们进行比较有他自己的优势,采取PLC技术控制电机的正反转控制简单,可靠性高,价格低廉.这里编写的电机控制子程序,可以直接移植于三相异步电机的类似控制场合,尤其用于一些小型的控制系统。
二、采用 PLC 实现异步电动机的起动、制动控制可编程序控制器是在继电器和计算机控制基础上开发的产品,所以它在继电器控制逻辑清晰的基础上,使用了计算机软件控制实现了控制方式的灵活改进。
因此与传统的继电器-接触器控制系统相比较,采用 PLC 实现异步电动机起、制动控制是最佳选择。
PLC 实现的异步电动机起、制动控制电路接线图,软件梯形图如下:(下边以三菱系列的 PLC 为例)电动机的主电路接线图不变,如图 2。
改进的控制接线图如图 3。
软件梯形图及程序如图 4。
此梯形图的控制过程如下:起动时,按下起动按钮 SB1,X400 的常开触点闭合,Y430 被激励并且自锁,接触器 KM1 通电,其主触点 KM1 闭合,电动机串入限流电阻 R 并开始起动,同时 Y430 的常开的触点也闭合。
当电动机转速上升到某一定值时,速度继电器的常开触点 KS1 闭合,那么对应的 X402 就闭合,M100 被激励并自锁,Y432 被激励,这样使得接触器 KM3 通电,其主触点 KM3 闭合,主电路中限流电阻 R 被短接,电动机的电流增大,转速上升直到初始设定值,电动机开始稳定运行。
SB1SB2KS1FR图3 PLC硬件接线图X400 X401 Y431 X403 Y430Y430M100Y430Y431Y430 M100 M100X402X403Y430M100Y432图4 PLC控制的梯形图X400KM1Y430X401KM2Y431X402KM3Y432X403COM ~ COMOKFU1R R RFRKS1M3~图1 主电路图KM1KM2 KA KM3图2 继电器接触器控制系统图制动时,按下停止按钮 SB2,即 X401 常闭触点断开,进而 Y430 不被激励,使得接触器 KM1 失电,对应的触点释放,这样 Y430 的常闭触点复位,则 Y431 被激励,接触器 KM2 通电,对应的触点 KM2 吸合,把电动机电源的两个相序对调,电动机处于反接制动状态。