一种有效的加速度计静态模型辨识方法
- 格式:pdf
- 大小:327.56 KB
- 文档页数:4
石英加速度计的数学静态模型解释说明以及概述引言的内容应该包括概述、文章结构和目的三个部分。
在撰写引言时,需要对全文进行概述,介绍石英加速度计的数学静态模型以及解释说明,并明确本文的结构和目的。
1. 引言1.1 概述本篇长文将详细探讨石英加速度计的数学静态模型。
作为一种重要的测量仪器,石英加速度计在导航领域和地震监测中具有广泛应用,且具有较大的发展潜力。
本文将深入解释石英加速度计的原理及背景,并通过建立数学静态模型来对其进行详细分析。
1.2 文章结构本文共分为五个主要部分:引言、石英加速度计的数学静态模型解释说明、石英加速度计的应用领域和前景展望、实验验证与结果分析以及结论与展望。
首先,引言部分将提供一个整体概述,并介绍后续各节所涵盖的内容。
然后,在第二部分中,我们将详细阐述石英加速度计的原理及背景,并介绍数学静态模型的基本原理。
在第三部分,我们将着重探讨石英加速度计在导航领域的应用以及其在地震监测中的潜力,并对其他应用领域进行展望。
第四部分将介绍实验设计及步骤,并说明数据采集与处理方法。
最后,在结论与展望部分,我们将总结本文所得出的主要结论,并提供未来研究方向的展望。
1.3 目的本文旨在通过解释和探讨石英加速度计的数学静态模型,深化人们对该仪器原理和应用领域的理解。
同时,通过实验验证与结果分析,验证模型的可行性和准确性。
最终,本文希望能够为相关领域研究者提供参考,并为未来进一步探索石英加速度计的可能性提供基础。
2. 石英加速度计的数学静态模型解释说明:2.1 石英加速度计的原理及背景:石英加速度计是一种利用压电效应测量加速度的设备。
其工作原理基于压电晶体会在施加力或产生振动时产生电荷,从而可以推导出物体所受的加速度。
这种技术已经被广泛地应用于导航、地震监测和其他领域,并且具有较高的精度和灵敏度。
2.2 数学静态模型的基本原理:石英加速度计的数学静态模型是通过建立物体运动方程以描述其受到的力和加速度之间的关系来实现。
物理实验技术中加速度计测量与标定技巧加速度计是物理实验中常用的一种仪器,用于测量物体的加速度。
在物理实验中,准确测量和标定加速度计是非常重要的。
本文将介绍加速度计的测量原理以及标定技巧,帮助读者更好地理解和应用加速度计。
一、加速度计的测量原理加速度计是一种用来测量物体加速度的设备,主要通过测量物体的惯性变化来实现。
常见的加速度计有压电式加速度计、光电式加速度计等。
压电式加速度计是利用压电材料的特性实现的。
压电材料在受到力或压力时会产生电荷,从而产生电压信号。
当加速度计受到加速度时,压电材料也会产生变形,并相应地产生电压信号。
通过测量产生的电压信号的大小,即可计算出物体的加速度。
光电式加速度计则是利用光电传感器测量物体的位移变化来实现的。
光电传感器通过光电效应将光信号转化为电信号,当加速度计受到加速度时,物体会发生位移变化,从而导致光电传感器测量到的光信号发生变化。
通过测量光信号的变化,即可计算出物体的加速度。
二、加速度计的标定技巧标定加速度计是为了使其输出的电信号与真实的物体加速度之间有一个准确可靠的对应关系。
下面介绍几种常见的标定技巧。
1. 零点校准零点校准是指在没有受到加速度时,将加速度计的输出调整为零。
可以将加速度计放在静止的平面上进行校准,通过调整仪器上的相关设置使输出为零。
经过零点校准后,可以保证在没有受到加速度时,加速度计的输出为零。
2. 常重校准常重校准是指在受到固定加速度(常重)下,将加速度计的输出调整为一个已知的数值。
首先需要提供一个已知的固定加速度,例如放置在重力水平方向的斜面上,使其受到斜面上固定的加速度。
然后通过调整加速度计的相关设置,使其输出与已知的加速度值相等。
3. 多点标定多点标定是指在多个已知加速度点上进行标定。
可以准备多个已知加速度的实验环境,然后将加速度计分别放置在这些实验环境中进行测量,记录加速度计的输出值。
根据已知的加速度和加速度计的输出值,可以建立起一个加速度与输出值之间的对应关系。
加速度测量实验方法分享加速度是描述物体在单位时间内速度变化率的物理量,它在科学研究和工程领域中具有重要的应用。
为了准确测量加速度,科学家和工程师们开发了各种实验方法和设备。
本文将分享一些常用的加速度测量实验方法,以及它们的原理和应用。
一、霍尔效应传感器法霍尔效应传感器法是一种常用的测量加速度的方法。
该方法利用霍尔效应传感器,通过测量磁场的变化来间接检测加速度。
具体步骤如下:1. 准备实验装置:将霍尔效应传感器固定在一个物体上,以便能够在物体发生加速度时检测到磁场的变化。
2. 运行实验:给物体施加一个已知的加速度,并记录霍尔效应传感器输出的信号。
3. 数据分析:根据霍尔效应传感器输出的信号,通过相关公式计算得到物体的加速度。
霍尔效应传感器法优点是具有较高的测量精度和稳定性,适用于大部分加速度测量场景。
二、质量轮法质量轮法是一种基于力矩平衡原理的加速度测量方法。
它利用质量轮的转动惯量和转动角加速度之间的关系,来计算加速度。
步骤如下:1. 准备实验装置:将质量轮安装在一个固定的轴上,并通过一段细丝与被测物体相连。
2. 运行实验:施加一个已知的加速度给被测物体,质量轮开始转动。
3. 数据记录与分析:记录质量轮转动的角度和时间,通过计算角加速度,并结合质量轮的转动惯量,计算得到加速度的值。
质量轮法适用于加速度较大的测量场景,在工程实验和车辆安全等领域中得到广泛应用。
三、压电传感器法压电传感器法是一种将压电效应应用于加速度测量的方法。
该方法利用压电材料的特性,在物体受到加速度时产生电荷,通过测量电荷的变化来间接测量加速度。
步骤如下:1. 准备实验装置:将压电传感器固定在被测物体上,以便能够在物体发生加速度时产生电荷。
2. 运行实验:给物体施加一个已知的加速度,并记录压电传感器输出的电荷信号。
3. 数据分析:根据压电传感器输出的电荷信号,通过相关公式计算得到物体的加速度。
压电传感器法具有灵敏度高、响应快的特点,适用于瞬态加速度的测量,广泛应用于航空航天领域和工业生产中。
IMU标定方法引言惯性测量单元(Inertial Measurement Unit,IMU)是一种常见的传感器,用于测量物体的加速度和角速度。
IMU广泛应用于导航、运动控制、姿态估计等领域。
由于制造和环境等因素的影响,IMU的准确性需要经过标定来得到更精确的测量结果。
本文将详细介绍IMU标定方法,并给出具体步骤和注意事项。
一、IMU标定的意义IMU标定是指通过实验手段确定IMU所测量的物理量与实际物理量之间的关系。
标定后的IMU能够提供更准确的加速度和角速度测量值,从而提高导航、姿态估计等应用的精度。
二、IMU标定方法概述IMU标定方法可以分为静态标定和动态标定两种。
其中静态标定是在静止状态下进行,适用于确定IMU的零偏和比例因子等参数;动态标定是在动态运动状态下进行,适用于确定IMU的误差模型和非线性因素等参数。
2.1 静态标定方法静态标定方法通过在静止状态下进行一系列实验,并根据实验数据进行参数拟合,得到IMU的零偏、比例因子等参数。
常用的静态标定方法有:2.1.1 零偏标定1.将IMU放置在水平的平台上,并保持静止。
2.记录一段时间的加速度计和陀螺仪输出数据。
3.对于三轴加速度计和陀螺仪分别计算平均值,得到零偏参数。
2.1.2 比例因子标定1.将IMU放置在已知加速度和角速度的参考系统中。
2.记录IMU和参考系统的输出数据。
3.根据已知加速度和角速度以及IMU的输出数据,计算比例因子参数。
2.2 动态标定方法动态标定方法通过在动态运动状态下进行一系列实验,利用系统动力学模型进行参数估计,得到IMU的误差模型、非线性因素等参数。
常用的动态标定方法有:2.2.1 静态回转法1.将IMU装在一个手持器材上,手持并依次在各个方向上进行平稳的旋转。
2.记录IMU的输出数据和旋转的角度。
3.利用旋转的角度和IMU的输出数据进行参数拟合,得到误差模型参数。
2.2.2 加速度计自由落体法1.将IMU从一定高度自由落下。
加速度计标定方法(一)加速度计标定标定是指校准传感器以确保其准确度和可靠性的过程。
在加速度计(accelerometer)使用过程中,进行加速度计标定是非常重要的一步,它能够提高测量结果的准确性。
本文将介绍几种常见的加速度计标定方法,以帮助读者更好地理解和应用加速度计。
方法一:零偏标定(Zero Offset Calibration)零偏标定主要是通过采集静态状态下的数据进行校准,步骤如下:1.将加速度计放置在稳定的平面上,确保不发生位移。
2.采集一段时间的数据,通常在几秒钟到一分钟之间。
3.计算采集到的数据的平均值,并将其作为零偏值。
方法二:尺度因子标定(Scale Factor Calibration)尺度因子标定方法可以校准加速度计的感受性(sensitivity),即加速度计输出和实际加速度之间的比例关系。
下面是一种常见的尺度因子标定方法:1.加速度计放置在重力加速度已知的平面上。
2.测量加速度计输出的数值,并将其除以已知的重力加速度,得到尺度因子。
3.重复上述步骤多次,并计算尺度因子的平均值。
方法三:轴对齐标定(Axis Alignment Calibration)轴对齐标定用于校准加速度计的坐标轴与参考坐标系之间的偏移。
通常,加速度计的坐标轴与参考坐标系的三个轴并不完全对齐,因此需要进行轴对齐标定。
以下是一种常用的轴对齐标定方法:1.放置加速度计在一个固定的平面上,该平面的方向与参考坐标系的一个轴尽可能保持一致。
2.通过施加静态的加速度(例如,旋转平面)或应用静态的力对加速度计进行刺激。
3.记录加速度计的输出并分析数据,计算出与参考坐标系的轴对齐的偏移量。
方法四:温度补偿标定(Temperature Compensation Calibration)温度补偿标定用于校准加速度计在不同温度下的输出变化。
由于温度会对加速度计的性能产生影响,因此温度补偿标定是非常重要的。
以下是一种常用的温度补偿标定方法:1.在不同温度下,分别对加速度计进行静态状态下的测量。
imu标定原理详解IMU(Inertial Measurement Unit)是一种能够测量物体加速度和角速度的传感器装置,它通常由加速度计和陀螺仪构成。
然而,IMU 的可靠性和精准性却同样取决于其标定是否合适。
IMU标定的目的是消除IMU的误差,以确保它的输出是准确的,从而为后续的应用提供可靠的基础。
在本文中,我们将详细阐述IMU标定的原理。
IMU标定步骤如下:1.数据采集要进行IMU标定,我们首先需要采集一组数据来分析IMU的误差。
在此过程中,我们可以使用IMU运动序列来收集一些惯性数据。
我们可以通过提前编写代码,在IMU中嵌入一个运动方案,运动方案与标准悬置对准,然后测量它对应的的加速度和角速度数据。
2.数据预处理IMU采集到的数据经过预处理后将得到更加准确的分析结果。
这包括一些基本的数据清理操作,比如去掉IMU的固有偏移,这个过程可以通过采用静态标定方法通过加速度计计算得到。
3.标定模型标定模型是用来描述误差的模型。
常用的模型包括简单线性模型、二阶模型、高斯模型等等。
在IMU标定中,通常使用的是简单的一阶线性模型,这个模型包含了加速度传感器和陀螺仪的固有偏移和比例因素。
4.误差参数估计在此步骤中,我们将确定误差参数。
这可以通过首先进行标准运动校准,也就是将IMU放置成一个定义好的位置,并使其运动到已知的另一个位置。
然后,我们将记录IMU输出的“真实”值,然后将其与标准值进行比较,并确定误差参数。
5.误差校正此步骤是用于校正误差的环节。
一旦确定了IMU的误差参数,我们可以使用标定后的数据重新计算加速度和角速度,然后使用这些校正的数据来重新测量当下的运动,从而消除误差。
如想要使用广泛的卡尔曼滤波器来整合IMU数据,也可以权威地结合IMU误差模型进行校正。
总之,IMU标定是整个系统中极为重要的一个步骤,通过对IMU错误参数的校正,可以使得IMU的输出变得更加准确可靠,并且为后续的应用提供更加准确的预测结果。
加速度计的静态校准
于治会
【期刊名称】《宇航计测技术》
【年(卷),期】2000(020)002
【摘要】介绍了静态校准加速度计的方法:地球重力法、负载法和离心机法.在用离心机法校准加速度计时,为了消除测量R的系统误差,可以采用径向R差值法.分析了这种方法的原理和误差.
【总页数】3页(P42-44)
【作者】于治会
【作者单位】沈阳346信箱检测中心
【正文语种】中文
【中图分类】V4
【相关文献】
1.基于激光干涉法的MEMS高g值加速度计准静态校准 [J], 刘爱莉;范锦彪;张茹开;王永芳;
2.重力加速度计的静态校准方法 [J], 杨爱东
3.加速度计的静态校准 [J], 于治会
4.底盘测功机校准装置动态滑行时间和静态速度校准方法探讨 [J], 黄徐瑞晗;张宇;付欣艳;王菊凤;廖蔚松;韩锋
5.振动比较法校准中加速度计灵敏度幅值校准不确定度的评估 [J], 于梅;孙桥因版权原因,仅展示原文概要,查看原文内容请购买。
基于LabVIEW的加速度计模型参数辨识模块设计郭鑫;王建林;于涛;赵利强【摘要】加速度计的模型参数辨识对研究加速度计动态特性具有重要作用.针对加速度计动态特性测试系统中加速度计模型参数辨识模块的设计,利用LabVIEW图形化编程的特点,以最小二乘原理为基础,通过对加速度计频域响应函数的拟合实现了加速度计模型参数的辨识,并构建了可视化软面板.实验测试表明:所设计模块能够实现加速度计模型参数辨识,有较高的参数辨识精度,并具有良好的人机交互,所辨识出的模型能够描述加速度计的动态特性.%Accelerometer model parameter identification plays an important role in studying of accelerometer dynamic characteristics. Aiming at design of accelerometer model parameter identification module in accelerometer dynamic performance testing system,use LabVIEW graphical programming features,use the principle of least squares,through fitting accelerometer frequency response function to achieve identification of accelerometer model parameters,and construct a visual soft panel. Experimental tests show that the designed module can achieve accelerometer model parameter identification,it has high precision of parameter identification and good human-computer interaction,the identified model can describe dynamic characteristics of accelerometer.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)002【总页数】4页(P123-125,129)【关键词】加速度计;LabVIEW;频域最小二乘;参数辨识【作者】郭鑫;王建林;于涛;赵利强【作者单位】北京化工大学信息科学与技术学院,北京100029;北京化工大学信息科学与技术学院,北京100029;北京化工大学信息科学与技术学院,北京100029;北京化工大学信息科学与技术学院,北京100029【正文语种】中文【中图分类】TP274在加速度计等传感器的研究中,其动态特性一直是人们关注的重点[1]。
单轴位置滚转法辨识加速度计静态模型的改进方法
姜复兴;吴广玉
【期刊名称】《中国惯性技术学报》
【年(卷),期】1994(000)001
【摘要】使用本文所述的方法辨识加速度计静态误差模态型时可以在单轴转台台面上任意安装加速度计。
由于避免了初始安装角调整零点的过程,因此,简化了测试过程,而且还提高了测试精度。
【总页数】6页(P24-29)
【作者】姜复兴;吴广玉
【作者单位】哈尔滨工业大学
【正文语种】中文
【中图分类】U666.122
【相关文献】
1.加速度计静态温度模型辨识及温度补偿方法研究 [J], 过润秋;郑晓东;王成
2.悬丝支承型加速度计静态温度模型辨识及温度补偿方法研究 [J], 李园晴;傅山;庞秀枝
3.MEMS加速度计静态温度模型的辨识 [J], 夏克洪;米亮
4.基于微粒群算法优化支持向量机的加速度计静态模型辨识 [J], 于湘涛;张兰;陈格非;周峰;许中生
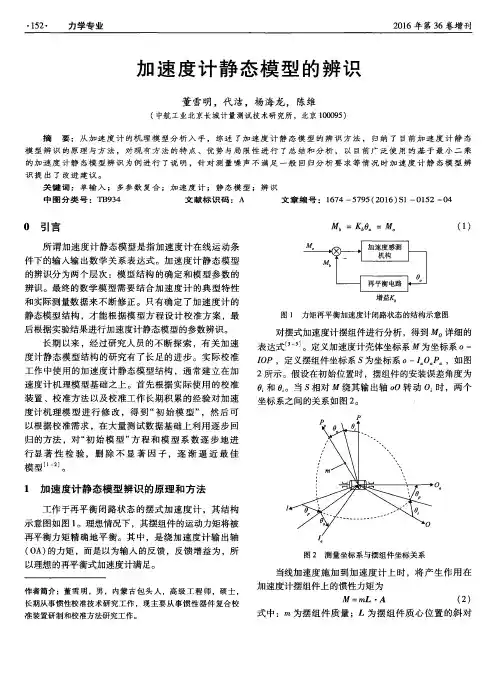
5.加速度计静态模型的辨识 [J], 董雪明;代洁;杨海龙;陈维
因版权原因,仅展示原文概要,查看原文内容请购买。