第二章电力拖动系统的动力学基础解析
- 格式:ppt
- 大小:1.88 MB
- 文档页数:12
电力拖动系统的动力学基础引言电力拖动系统是一种将电能转化为机械能的系统,广泛应用于各种工业和交通领域。
研究电力拖动系统的动力学基础是理解其工作原理和性能的关键。
本文将介绍电力拖动系统的动力学基础,包括动力学方程、系统稳定性和控制方法等方面的内容。
动力学方程电力拖动系统的动力学方程描述了系统的运动规律。
一般而言,电力拖动系统可以分为两个部分:电动机和负载。
电动机负责产生力和扭矩,将电能转化为机械能;负载则承受电动机输出的力和扭矩。
动力学方程可以用以下方式表示:\\(J\\frac{{d\\omega}}{{dt}} = T_m - T_l - B\\omega\\)其中,\(J\)是系统的转动惯量,\(\omega\)是系统的角速度,\(T_m\)是电动机输出的扭矩,\(T_l\)是负载承受的扭矩,\(B\)是摩擦系数。
动力学方程描述了系统内部各个力和扭矩之间的平衡关系。
当电动机输出的扭矩大于负载承受的扭矩时,系统可以加速。
反之,当负载承受的扭矩大于电动机输出的扭矩时,系统会减速。
系统稳定性电力拖动系统的稳定性是评估系统性能的关键指标之一。
系统稳定性主要取决于电动机的控制方式和系统参数的选取。
闭环控制闭环控制是常用的电力拖动系统控制方式之一。
闭环控制通过不断检测系统的实际输出,与期望输出进行比较,然后调整电动机的输入信号,使得系统能够迅速响应和稳定工作。
闭环控制的动力学方程可以表示为:\\(T_m = K_p(\\omega_r - \\omega) + K_i\\int(\\omega_r - \\omega)dt + K_d\\frac{{d(\\omega_r - \\omega)}}{{dt}}\\)其中,\(T_m\)是电动机输出的扭矩,\(\omega_r\)是期望的角速度,\(\omega\)是实际的角速度,\(K_p\)、\(K_i\)和\(K_d\)是比例、积分和微分增益。
闭环控制能够提高系统的稳定性和响应速度,使得系统能够更好地适应外部负载变化。
第2章 电力拖动基础的动力学工业生产中最典型的电力拖动系统有电力机车、起重机、龙门刨床等。
由于实际电力拖动系统种类太多,不可能逐一进行研究,所以要找到它们共同的运动规律加以综合分析。
电力拖动系统的运动规律可以用动力学中的运动方程来描述。
为了抓住本质,本章首先分析简单的单轴电力拖动系统动力学行为,然后分析多轴系统的折算问题,典型的负载转矩性质,最后电力拖动系统的平衡稳定运转问题。
2.1单轴电力拖动系统的动力学分析所谓单轴电力拖动系统,就是电动机转子轴直接拖动生产机械运转的系统,如图2.1所示。
图2.1 单轴电力拖动系统示意图单轴电力拖动系统中电磁转矩T 、负载转矩L T 和角速度Ω之间的关系用转动方程式表示为:dt d JT T L Ω=- (2.1)式中,T 为电动机产生的拖动转矩()m N ⋅;L T 为负载转矩()m N ⋅;J 为单轴系统的转动惯量()2m kg ⋅;Ω为单轴系统的角速度()s rad。
工程上,常常不用转动惯量J 而用飞轮惯量或飞轮矩2GD 表示系统的惯性。
系统的速度不用角速度Ω用而转速n 表示。
2GD 与J 之间的关系为gJ GD 42=式中,G 为系统转动部分的重量()N ;D 为系统转动部分的惯性直径()m ;g 为中重力加速度,28.9s mg =。
角速度Ω与转速n 的关系为602nπ=Ω 将上面两式代入运动方程(2.1)式中,化简后得dt dnGD T T L ⋅=-3752 (2.2) 式中,375是一个具有加速度量纲的系数,其单位为1m in -⋅s m ;转矩单位仍为m N ⋅;转速单位仍为min r 。
L T T -称为动态转矩。
当动态转矩为零时,系统处于恒转速运行的稳态;动态转矩大于零时,系统处于加速运动的过渡过程中;动态转矩小于零时,系统处于减速运动的过渡过程中。
运动方程式(2.2)中,由于电动机运行状态的不同和生产机械负载类型的不同,电动机轴上的拖动转矩T 和负载转矩L T 不仅大小不同,方向也是变化的。
第2章电力拖动系统的动力学基础2.1概述在生产实践中广泛采用电动机作为原动机拖动生产机械运转,以完成一定的生产任务。
这种以电动机作为原动机拖动生产机械运动的拖动方式称为“电力拖动”。
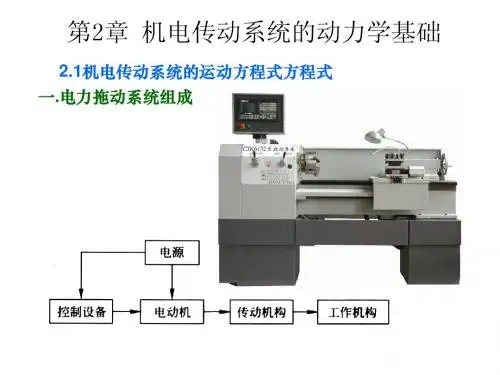
一般情况下,电力拖动系统是由电动机、控制设备、传动机构、电源及工作机构等五个组成部分,如图2-1所示。
电动机作为原动机,通过传动机构拖动生产机械完成某一生产任务。
传动机构主要用于电动机和生产机械之间传递功率和转矩,变换运动速度及形式。
控制设备是由各种控制电器、工业控制计算机、可编程控制器等组成,用以控制电动机的运行,从而对工作机构的运动实现自动控制。
电源部分向电动机及一些电气控制设备供电。
图2-1电力拖动系统示意图在研究电力拖动系统的运动规律时,一般情况下不考虑电力拖动系统中所用的电动机的种类以及生产机械的性质,而是把电动机、传动机构和生产机械看作是一个运动着的整体进行分析、研究,找出它们所遵循的统一的运动规律,建立电力拖动系统的运动方程。
2.2电力拖动系统的运动方程式2.2.1单轴拖动系统的运动方程式所谓单轴拖动系统是指电动机输出轴直接拖动生产机械运转的系统。
此时电动机、传动机构、机械负载等所有的运动部件均以同一转速运动。
这种单轴拖动系统是电力拖动系统中最基本的一种。
它是研究复杂电力拖动系统的基础。
单轴拖动系统又分为两种形式,一种形式是单轴旋转拖动系统,另一种形式是单轴直线运动的拖动系统。
下面分别研究这两种简单电力拖动系统的运动方程式。
1. 单轴直线运动拖动系统的运动方程式根据牛顿第二定律,在电力拖动系统中如果生产机械做直线运动,作用在电动机轴上的电动力F 与阻力L F 以及速度变化时产生的惯性力ma 之间的关系遵循下列基本运动方程式。
ma F F L =-式中,F —拖动力,单位为N ;L F —阻力,单位为N ;m —物体的质量,单位为kg ; a —物体的加速度,单位为2/s m ;上式也可写成dtdvmF F L =- (2-1) 式中,dtdvm是惯性力,如果质量m 的单位为kg ,速度v 的单位为s m /,时间t 的单位为s ,则惯性力的单位与F 及L F 的单位相同,为N 。