汽车理论第六章作业2
- 格式:doc
- 大小:205.00 KB
- 文档页数:5

第一章汽车的动力性1.1 试说明轮胎滚动阻力的定义,产生机理和作用形式。
定义:汽车在水平道路上等速行驶时受到的道路在行驶方向上的分力称为滚动祖力。
2)产生机理:由于轮胎内部摩擦产生弹性轮胎在硬支律路面上行驶时加载变形曲线和卸载变形曲线不重合会有能全损失,即弹性物质的迟滞损失。
这种迟滞损失表现为一种阻力偶。
当车轮不滚动时,地面对丰轮的法向反作用力的分布是前后对称的;当车轮滚动时,由于弹性阻滞现象,处于压缩过程的前部点的地面法向反作用力就会大于处于压缩过程的后部点的地面法向反作用力,这样,地面法向反作用力的分布前后不对称,而使他们的合力F Z相对于法线前移一个距离a,它随弹性迟滞损失的增大变大。
即滚动时有滚动阻力偶T f = F Z.•a阻碍车轮滚动。
3]作用形式: T f = Wf,T f = T f/r1.2 滚动阻力系数与哪些因素有关?答:滚动阻力系数与路面的种类、行驶车速以及轮胎的构造、材料和气压有关。
1.3=494.312+0.13U a2由计算机作图有:1.4 空车、满载时汽车动力性有无变化?为什么?答:动力性会发生变化。
因为满载时汽车的质量会增大,重心的位置也会发生改变。
质量增大,滚动阻力、坡度阻力和加速阻力都会增大,加速时间会增加,最高车速降低。
重心位置的改变会影响车轮附着率,从而影响最大爬坡度。
1.5 如何选择汽车发动机功率?答:发动机功率的选择常先从保证汽车预期的最高车速来初步确定。
若给出了期望的最高车速,选择的发动机功率应大体等于,但不小于以最高车速行驶时的行驶阻力功率之和。
发动机的最大功率但也不宜过大,否则会因发动机负荷率偏低影响汽车的燃油经济性。
在实际工作中,还利用现有汽车统计数据初步估计汽车比功率来确定发动机应有功率。
不少国家还对车辆应有的最小比功率作出规定,以保证路上行驶车辆的动力性不低于一定水平,防止某些性能差的车辆阻碍车流。
1.6 超车时该不该换入低一挡的排挡?答:超车时排挡的选择,应该使车辆在最短的时间内加速到较高的车速,所以是否应该换入低一挡的排挡应该由汽车的加速度倒数曲线决定。
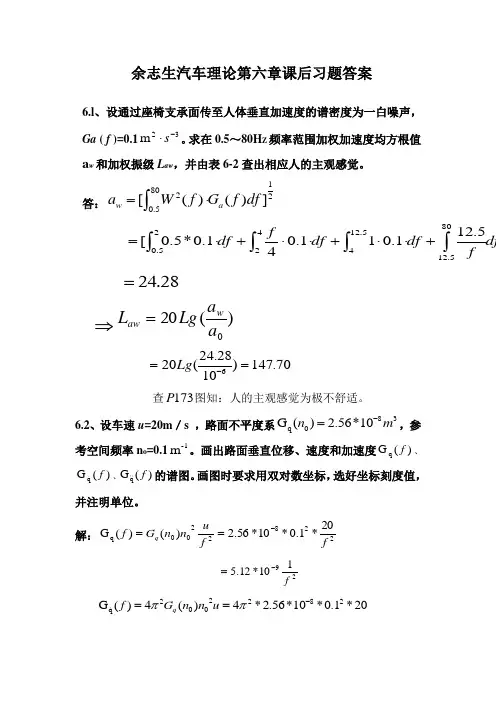
余志生汽车理论第六章课后习题答案6.l 、设通过座椅支承面传至人体垂直加速度的谱密度为一白噪声,Ga ( f )=0.132m -⋅s 。
求在0.5~80H Z 频率范围加权加速度均方根值a w 和加权振级L aw ,并由表6-2查出相应人的主观感觉。
答:21805.02])()([df f G f W a a w ⎰⋅=805.125.1244225.05.121.011.041.0*5.0[dff df df f df ⎰⎰⎰⎰+⋅⋅+⋅⋅+⋅=28.24=⇒)(200a a Lg L waw=70.147)1028.24(206==-Lg查173P 图知:人的主观感觉为极不舒适。
6.2、设车速u =20m /s ,路面不平度系380q 10*56.2)(G m n -=,参考空间频率n o =0.1-1m 。
画出路面垂直位移、速度和加速度)(G q f 、)(G q f 、)(G q f 的谱图。
画图时要求用双对数坐标,选好坐标刻度值,并注明单位。
解:228220q 20*1.0*10*56.2)()(G f f u n n G f q -==29110*12.5f-= 20*1.0*10*56.2*4)(4)(G 282202q -==ππu n n G f q-710*2.02=22842204q *1.0*10*56.2*16)(16)(G f uf n n G f q -==ππ 2-710*99.3f =画出图形为:6.3、设车身-车轮二自由度汽车模型,其车身部分固有频率f o =2Hz 。
它行驶在波长λ=5m 的水泥接缝路上,求引起车身部分共振时的车速u n (km/h)。
该汽车车轮部分的固有频率f t =10Hz ,在砂石路上常用车速为30km/h 。
问由于车轮部分共振时,车轮对路面作用的动载所形成的搓板路的波长λ=?答:①当激振力等于车辆固有频率时,发生共振,所以发生共振时的车速为:2*5u 0a =⋅=f λs m /10=②搓板路的波长 :m 65106.3/30==λ6.4、设车身单质量系统的幅频 |z /q | 用双对数坐标表示时如习题图6所示。
第一章汽车的动力性1。
1 试说明轮胎滚动阻力的定义,产生机理和作用形式。
定义:汽车在水平道路上等速行驶时受到的道路在行驶方向上的分力称为滚动祖力。
2)产生机理:由于轮胎内部摩擦产生弹性轮胎在硬支律路面上行驶时加载变形曲线和卸载变形曲线不重合会有能全损失,即弹性物质的迟滞损失.这种迟滞损失表现为一种阻力偶.当车轮不滚动时,地面对丰轮的法向反作用力的分布是前后对称的;当车轮滚动时,由于弹性阻滞现象,处于压缩过程的前部点的地面法向反作用力就会大于处于压缩过程的后部点的地面法向反作用力,这样,地面法向反作用力的分布前后不对称,而使他们的合力F Z相对于法线前移一个距离a,它随弹性迟滞损失的增大变大.即滚动时有滚动阻力偶T f = F Z。
•a阻碍车轮滚动。
3]作用形式: T f = Wf,T f = T f/r1.2 滚动阻力系数与哪些因素有关? 答:滚动阻力系数与路面的种类、行驶车速以及轮胎的构造、材料和气压有关.1。
3=494.312+0。
13U a2由计算机作图有:1.4 空车、满载时汽车动力性有无变化?为什么?答:动力性会发生变化.因为满载时汽车的质量会增大,重心的位置也会发生改变.质量增大,滚动阻力、坡度阻力和加速阻力都会增大,加速时间会增加,最高车速降低。
重心位置的改变会影响车轮附着率,从而影响最大爬坡度。
1。
5 如何选择汽车发动机功率?答:发动机功率的选择常先从保证汽车预期的最高车速来初步确定。
若给出了期望的最高车速,选择的发动机功率应大体等于,但不小于以最高车速行驶时的行驶阻力功率之和。
发动机的最大功率但也不宜过大,否则会因发动机负荷率偏低影响汽车的燃油经济性。
在实际工作中,还利用现有汽车统计数据初步估计汽车比功率来确定发动机应有功率。
不少国家还对车辆应有的最小比功率作出规定,以保证路上行驶车辆的动力性不低于一定水平,防止某些性能差的车辆阻碍车流。
1。
6 超车时该不该换入低一挡的排挡?答:超车时排挡的选择,应该使车辆在最短的时间内加速到较高的车速,所以是否应该换入低一挡的排挡应该由汽车的加速度倒数曲线决定。
第六章6.l 、设通过座椅支承面传至人体垂直加速度的谱密度为一白噪声,Ga ( f )=0.132m -⋅s 。
求在0.5~80H Z 频率范围加权加速度均方根值a w 和加权振级L aw ,并由表6-2查出相应人的主观感觉。
答:21805.02])()([df f G f W a a w ⎰⋅=805.125.1244225.05.121.011.041.0*5.0[dff df df f df ⎰⎰⎰⎰+⋅⋅+⋅⋅+⋅=28.24=⇒)(200a a Lg L waw=70.147)1028.24(206==-Lg查173P 图知:人的主观感觉为极不舒适。
6.2、设车速u =20m /s ,路面不平度系380q 10*56.2)(G m n -=,参考空间频率n o =0.1-1m 。
画出路面垂直位移、速度和加速度)(G q f 、)(G q f 、)(G qf 的谱图。
画图时要求用双对数坐标,选好坐标刻度值,并注明单位。
解:228220q 20*1.0*10*56.2)()(G f f u n n G f q -==29110*12.5f-= 20*1.0*10*56.2*4)(4)(G 282202q -==ππu n n G f q-710*2.02=22842204q *1.0*10*56.2*16)(16)(G f uf n n G f q -==ππ 2-710*99.3f =画出图形为:6.3、设车身-车轮二自由度汽车模型,其车身部分固有频率f o =2Hz 。
它行驶在波长λ=5m 的水泥接缝路上,求引起车身部分共振时的车速u n (km/h)。
该汽车车轮部分的固有频率f t =10Hz ,在砂石路上常用车速为30km/h 。
问由于车轮部分共振时,车轮对路面作用的动载所形成的搓板路的波长λ=?答:①当激振力等于车辆固有频率时,发生共振,所以发生共振时的车速为:2*5u 0a =⋅=f λs m /10=②搓板路的波长 :m 65106.3/30==λ6.4、设车身单质量系统的幅频 |z /q | 用双对数坐标表示时如习题图6所示。
第六章作业:clear;clc;%初始化题干参数如下:f0=1.5;s=0.25;%阻尼比δgama=9;%刚度比γmu=10;%质量比μfs=3;ypss=0.25;g=9.8;ua=20;Gqn0=2.56*10^(-8);%路面不平度系数a0=10^(-6);n0=0.1;detaf=0.2;N=180;f=detaf*(0:N);lambda=f/f0;%车身频率比λlambdas=f/fs;%车轮频率比λW_f=0*f;deta=((1-lambda.^2).*(1+gama-1/mu*lambda.^2)-1).^2+4*s^2*lambda.^2.*(gama-(1/ mu+1)*lambda.^2).^2;z1_q=gama*sqrt(((1-lambda.^2).^2+4*s^2*lambda.^2)./deta); %幅频响应|z1/q|z2_z1=sqrt((1+4*s^2*lambda.^2)./((1-lambda.^2).^2+4*s^2*lambda.^2));%幅频响应|z2/z1|p_z2=sqrt((1+(2*ypss*lambdas).^2)./((1-lambdas.^2).^2+(2*ypss*lambdas).^2));%幅频响应|p/z2|z2_q=gama*sqrt((1+4*s^2*lambda.^2)./deta);p_q=p_z2.*z2_q; %幅频响应|z2/q|sqrt_Gq_f=4*pi^2*f*sqrt(Gqn0*n0^2*ua);sqrt_Gz1_f=z1_q.*sqrt_Gq_f;sqrt_Gz2_f=z2_q.*sqrt_Gq_f;sqrt_Ga_f=p_q.*sqrt_Gq_f;sigmaq=sqrt(trapz(f,sqrt_Gq_f.^2));%路面不平度加速度均方根值sigmaz1=sqrt(trapz(f,sqrt_Gz1_f.^2));%车轮加速度均方根值sigmaz2=sqrt(trapz(f,sqrt_Gz2_f.^2));%车身加速度均方根值sigma_a=sqrt(trapz(f,sqrt_Ga_f.^2));%人体加速度均方根值for i=1:(N+1)if f(i)<=2W_f(i)=0.5;elseif f(i)<=4W_f(i)=f(i)/4;elseif f(i)<=12.5W_f(i)=1;elseW_f(i)=12.5/f(i);endendaww=W_f.^2.*sqrt_Ga_f.^2;aww=sqrt(trapz(f,aww));%加权加速度均方根值Law1=20*log10(aww/a0);%加权振级disp('路面不平度加速度均方根值为');disp(sigmaq);disp('车轮加速度均方根值为');disp(sigmaz1);disp('车身加速度均方根值为');disp(sigmaz2);disp('人体加速度均方根值为');disp(sigma_a);disp('加权加速度均方根值为');disp(aww);disp('加权振级');disp(Law1);figure(1)plot(f,z1_q);title('幅频特性|z1/q|, (f=1.5Hz, δ=0.25,γ=9,μ=10)'),xlabel('激振频率f/Hz'),ylabel('|z1/q|');figure(2)plot(f,z2_z1);title('幅频特性|z2/z1|,(f=1.5Hz, δ=0.25,γ=9,μ=10)'),xlabel('激振频率f/Hz'),ylabel('|z2/z1|');figure(3)plot(f,p_z2);title('幅频特性|p/z2|,(fs=1.5Hz, δs=0.25)'),xlabel('激振频率f/Hz'),ylabel('|p/z2|'); figure(4)plot(f,sqrt_Gz1_f);title('车轮加速度均方根值√Gz1(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Gz1(f)'); figure(5)plot(f,sqrt_Gz2_f);title('车身加速度均方根值√Gz2(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Gz2(f)'); figure(6)plot(f,sqrt_Ga_f);title('人体加速度均方根值√Ga(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Ga(f)'); %第二问:ypss0=(0.125:0.005:0.5);a=0*ypss0;La=0*ypss0;M=length(ypss0);for i=1:Myps=ypss0(i);lambdas=f/fs;deta=((1-lambda.^2).*(1+gama-1/mu*lambda.^2)-1).^2+4*yps^2*lambda.^2.*(gama-(1/mu+1)*lambda.^2).^2;p_z2=sqrt((1+(2*ypss*lambdas).^2)./((1-lambdas.^2).^2+(2*ypss*lambdas).^2));z2_q=gama*sqrt((1+4*yps^2*lambda.^2)./deta);p_q=p_z2.*z2_q;jfg_Gqddf=4*pi^2*sqrt(Gqn0*n0^2*ua)*f;jfg_Gaf=p_q.*jfg_Gqddf;kk=W_f.^2.*jfg_Gaf.^2;aww(i)=sqrt(trapz(f,kk));endLaw1=20*log10(aww/a0);figure(7)plot(ypss0,aww);title('aw随δs的变化'),xlabel('“人体—座椅”系统的阻尼比δs'),ylabel('aw/m*s^-2');figure(8)plot(ypss0,Law1);title('Law随δs的变化'),xlabel('“人体—座椅”系统的阻尼比δs'),ylabel('Law/dB'); fs=1.5:0.025:6;k=length(fs);for i=1:kfs0=fs(i);lambdas1=f/fs0;deta=((1-lambda.^2).*(1+gama-1/mu*lambda.^2)-1).^2+4*yps^2*lambda.^2.*(gama-(1/mu+1)*lambda.^2).^2;p_z2=sqrt((1+(2*ypss*lambdas1).^2)./((1-lambdas1.^2).^2+(2*ypss*lambdas1).^2));z2_q=gama*sqrt((1+4*yps^2*lambda.^2)./deta);p_q=p_z2.*z2_q;jfg_Gqddf1=4*pi^2*sqrt(Gqn0*n0^2*ua)*f;jfg_Ga1f=p_q.*jfg_Gqddf1;kk1=W_f.^2.*jfg_Ga1f.^2;aww(i)=sqrt(trapz(f,kk1));endLaw2=20*log10(aww/a0);figure(9)plot(fs,aww);title('aw随fs的变化'),xlabel('“人体—座椅”系统的固有频率fs'),ylabel('aw/m*s^-2');figure(10)plot(fs,Law2);title('Law随fs的变化'),xlabel('“人体—座椅”系统的固有频率fs'),ylabel('Law/dB'); %第三问:%三个响应量均方根值随f0变化的曲线ff0=0.25:0.05:3;sigmaz2=0*ff0;sigmafd=0*ff0;sigmaFd_G=0*ff0;M=length(ff0);for i=1:Mf0=ff0(i);f=detaf*(0:N);lamta=f/f0;lamtas=f/fs;deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/m u+1)*lamta.^2).^2;z2_qdot=2*pi*f*gama.*sqrt((1+4*yps^2*lamta.^2)./deta);fd_qdot=gama*lamta.^2./(2*pi*f+eps)./sqrt(deta);Fd_Gqdot=2*pi*f*gama/g.*sqrt(((lamta.^2/(mu+1)-1).^2+4*yps^2*lamta.^2)./deta);Gq_dotf=4*pi^2*Gqn0*n0^2*ua;Gz2f=(z2_qdot).^2*Gq_dotf;Gfd_qf=(fd_qdot).^2*Gq_dotf;GFd_Gf=(Fd_Gqdot).^2*Gq_dotf;sigmaz2(i)=sqrt(trapz(f,Gz2f));sigmafd(i)=sqrt(trapz(f,Gfd_qf));sigmaFd_G(i)=sqrt(trapz(f,GFd_Gf));if f0==1.5sgmz2=sigmaz2(i);sgmfd=sigmafd(i);sgmFd_G=sigmaFd_G(i);endendsz2=20*log10(sigmaz2/sgmz2);sfd=20*log10(sigmafd/sgmfd);sFd_G=20*log10(sigmaFd_G/sgmFd_G);plot(ff0,sz2,'r-',ff0,sfd,'b-.',ff0,sFd_G,'k--');l egend('σz2','σfd','σFd/G');gtext('σz2');gtext('σfd');gtext('σFd/G');axis([0.25 3 -25 15]);title('三个响应量均方根值随f0变化的曲线'),xlabel('车身部分固有频率f0/Hz'),ylabel('σz2/dB,σfd/dB,σFd/G/dB');%三个响应量均方根值随δ变化的曲线c=(0.5-0.125)/180;yps0=0.125:c:0.5;sigmaz2=0*yps0;sigmafd=0*yps0;sigmaFd_G=0*yps0;M=length(yps0);for i=1:Myps=yps0(i);f=detaf*(0:N);lamta=f/f0;lamtas=f/fs;deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/m u+1)*lamta.^2).^2;z2_qdot=2*pi*f*gama.*sqrt((1+4*yps^2*lamta.^2)./deta);fd_qdot=gama*lamta.^2./(2*pi*f+eps)./sqrt(deta);Fd_Gqdot=2*pi*f*gama/g.*sqrt(((lamta.^2/(mu+1)-1).^2+4*yps^2*lamta.^2)./deta);Gq_dotf=4*pi^2*Gqn0*n0^2*ua;Gz2f=(z2_qdot).^2*Gq_dotf;Gfd_qf=(fd_qdot).^2*Gq_dotf;GFd_Gf=(Fd_Gqdot).^2*Gq_dotf;sigmaz2(i)=sqrt(trapz(f,Gz2f));sigmafd(i)=sqrt(trapz(f,Gfd_qf));sigmaFd_G(i)=sqrt(trapz(f,GFd_Gf));if yps==0.25sgmz2=sigmaz2(i);sgmfd=sigmafd(i);sgmFd_G=sigmaFd_G(i);endendsz2=20*log10(sigmaz2/sgmz2);sfd=20*log10(sigmafd/sgmfd);sFd_G=20*log10(sigmaFd_G/sgmFd_G);plot(yps0,sz2,'r-',yps0,sfd,'b-.',yps0,sFd_G,'k--');axis([0.125 0.5 -4 4]);title('三个响应量均方根值随δ变化的曲线'),xlabel('车身部分阻尼比δ'),ylabel('σz2/dB,σfd/dB,σFd/G/dB');legend('σz2','σfd','σFd/G');gtext('σz2');gtext('σfd');gtext('σFd/G');%三个响应量均方根值随γ变化的曲线gama0=4:0.1:19;sigmaz2=0*gama0;sigmafd=0*gama0;sigmaFd_G=0*gama0;M=length(gama0);for i=1:Mgama=gama0(i);f=detaf*(0:N);lamta=f/f0;lamtas=f/fs;deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/m u+1)*lamta.^2).^2;z2_qdot=2*pi*f*gama.*sqrt((1+4*yps^2*lamta.^2)./deta);fd_qdot=gama*lamta.^2./(2*pi*f+eps)./sqrt(deta);Fd_Gqdot=2*pi*f*gama/g.*sqrt(((lamta.^2/(mu+1)-1).^2+4*yps^2*lamta.^2)./deta);Gq_dotf=4*pi^2*Gqn0*n0^2*ua;Gz2f=(z2_qdot).^2*Gq_dotf;Gfd_qf=(fd_qdot).^2*Gq_dotf;GFd_Gf=(Fd_Gqdot).^2*Gq_dotf;sigmaz2(i)=sqrt(trapz(f,Gz2f));sigmafd(i)=sqrt(trapz(f,Gfd_qf));sigmaFd_G(i)=sqrt(trapz(f,GFd_Gf));if gama==9sgmz2=sigmaz2(i);sgmfd=sigmafd(i);sgmFd_G=sigmaFd_G(i);endendsz2=20*log10(sigmaz2/sgmz2);sfd=20*log10(sigmafd/sgmfd);sFd_G=20*log10(sigmaFd_G/sgmFd_G);figure(13)plot(gama0,sz2,'r-',gama0,sfd,'b-.',gama0,sFd_G,'k--');axis([4 18 -5 6]);title('三个响应量均方根值随γ变化的曲线'),xlabel('悬架与轮胎的刚度比γ'),ylabel('σz2/dB,σfd/dB,σFd/G/dB');legend('σz2','σfd','σFd/G');gtext('σz2');gtext('σfd');gtext('σFd/G');mu0=5:0.1:20;sigmaz2=0*mu0;sigmafd=0*mu0;sigmaFd_G=0*mu0;M=length(mu0);for i=1:Mmu=mu0(i);f=detaf*(0:N);lamta=f/f0;lamtas=f/fs;deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/m u+1)*lamta.^2).^2;z2_qdot=2*pi*f*gama.*sqrt((1+4*yps^2*lamta.^2)./deta);fd_qdot=gama*lamta.^2./(2*pi*f+eps)./sqrt(deta);Fd_Gqdot=2*pi*f*gama/g.*sqrt(((lamta.^2/(mu+1)-1).^2+4*yps^2*lamta.^2)./deta);Gq_dotf=4*pi^2*Gqn0*n0^2*ua;Gz2f=(z2_qdot).^2*Gq_dotf;Gfd_qf=(fd_qdot).^2*Gq_dotf;GFd_Gf=(Fd_Gqdot).^2*Gq_dotf;sigmaz2(i)=sqrt(trapz(f,Gz2f));sigmafd(i)=sqrt(trapz(f,Gfd_qf));sigmaFd_G(i)=sqrt(trapz(f,GFd_Gf));if mu==10sgmz2=sigmaz2(i);sgmfd=sigmafd(i);sgmFd_G=sigmaFd_G(i);endendsz2=20*log10(sigmaz2/sgmz2);sfd=20*log10(sigmafd/sgmfd);sFd_G=20*log10(sigmaFd_G/sgmFd_G);figure(14)plot(mu0,sz2,'r-',mu0,sfd,'b-.',mu0,sFd_G,'k--'); axis([5 20 -2 2]);title('三个响应量均方根值随μ变化的曲线'),xlabel('车身与车轮部分质量比μ'),ylabel('σz2/dB,σfd/dB,σFd/G/dB'); legend('σz2','σfd','σFd/G');gtext('σz2');gtext('σfd');gtext('σFd/G');计算结果:第一问结果:路面不平度加速度均方根值为0.3523车轮加速度均方根值为0.2391车身加速度均方根值为0.0168人体加速度均方根值为0.0161加权加速度均方根值为0.0100加权振级80.0291第二问的答案:第三问答案:。
汽车理论作业
汽73 2007010806 许四聪
6.3
解:引起部分共振时的车速:h km s m f u a /36/10520==⨯==λ 车轮共振时的路面的波长:)(833.010
6.330m f u t a =⨯==λ
6.4
解:由题6.2可知路面输入谱为:()3
4
01056.2m n G q -⨯=,参考空间频率为101.0-=m n
车速为s m u /20=
路面功率谱密度:2
522
4220
01012.5201.01056.2)()(f
f f u n n G f G q q --⨯=⨯⨯⨯== 由图可知:
⎪
⎩⎪⎨⎧<<<<=)
101(1)11.0(1f f
f q z
所以车身加速度谱密度为:⎩⎨
⎧<<<<==⨯⨯⨯
====-)101(0798
.0)11.0(0798.00798.010
12.516)
(16)()()(22
2
2
5
2
4
4
2
44222f f f q
z
f f q z f f G q
z
f f G q z f G q z f G q q q z ππω
计算得车身加速度的均方根值为:
)/(8623.0]0798.00798.0[])([25.010
1
11
.025.0101
.0s m df df f df f G z z =+==⎰⎰⎰ σ
下面绘制其车身加速度谱图:
程序如下: g=2.56*10^-4; n=0.1; u=20;
f=0.1:0.01:10; gq=g*n^2*u./f.^2;
h=1*(0.1<f&f<1)+1./f.*(1<f&f<10); gz=16*pi^4.*f.^4.*h.^2.*gq; loglog(f,gz);
title('加速度谱密度曲线');
xlabel('f/Hz');
ylabel('加速度谱密度');
grid on;
课上题目:
比较分析车身部分固有频率、车身部分阻尼比、车身与车轮部分质量比、悬架与轮胎的刚度比对车身加速度、动挠度和相对动载荷均方根值的影响。
根据书中给出的均方根值的计算方法,固定四个参数中的三个,然后改变一个的值,进行比较绘图,改变的值如下:
系统参数f0/Hz ζμγ
基准值 1 0.25 10 9
+6dB 2 0.5 20 18
+3 dB 1.412 0.353 14.12 12.71
-3 dB 0.708 0.177 7.08 6.37
-6dB 0.5 0.125 5 4.5
编的程序如下:其中a为频率,b为阻尼比,c为质量比,d为刚度比,
得到的z为加速度均方根值,z1为相对动载荷均方根值,z2为挠度均方根值。
a=1;
b=0.25;
c=10;
d=9;
s=0;
for n=1:180;
e=0.2*n/a;
f=((1-e^2)*(1+d-1/c*e^2)-1)^2+4*b^2*e^2*(d-(1/c+1)*e^2)^2; s=s+n^2/f*(1+4*b^2*e^2);
end
z=(4*pi^2*64*(1e-6)*0.01*(2*pi*0.2*d)^2*0.2*s)^0.5
f=0;
s1=0;
for n=1:180;
e=0.2*n/a;
f=((1-e^2)*(1+d-1/c*e^2)-1)^2+4*b^2*e^2*(d-(1/c+1)*e^2)^2; s1=s1+n^2/f*((e^2/(1+c)-1)^2+4*b^2*e^2);
end
z1=(4*pi^2*64*(1e-6)*0.01*(2*pi*0.2*d/9.8)^2*0.2*s1)^0.5 f=0;
s2=0;
for n=1:180;
e=0.2*n/a;
f=((1-e^2)*(1+d-1/c*e^2)-1)^2+4*b^2*e^2*(d-(1/c+1)*e^2)^2; s2=s2+n^(-2)*e^4/f;
end
z2=(4*pi^2*64*(1e-6)*0.01*(2*pi*0.2)^(-2)*0.2*s2)^0.5
经计算后得到下面的图:
由上面四张图可以知道:
(1)、车身固有频率对三个振动响应量有很大的影响,其中2
..z σ和G F d /σ与0f 几乎成正比变
化,两个的变化趋势几乎相同,变化幅度均比0f 大;而d f σ与0f 成反比变化,变化幅度均比0f 小。
(2)、车身部分阻尼比的变化也对三个振动响应量有很大的影响,其中2
..z σ在ζ约为0.177
时达到最小值;G F d /σ在ζ约为0.4时达到最小值;d f σ与0f 成反比变化。
(3)、车身与车轮部分质量比的变化对2
..z σ和d f σ的影响非常小,可以忽略不计,主要影响
G F
d
/σ,
G F
d
/σ与
0f 成反比变化,但变化幅度并不是很大。
(4)、悬架与轮胎的刚度比γ的变化对三个振动响应量均有影响,其中2
..z σ和G F d /σ与γ几乎成正比变化,而d f σ与γ成反比变化,但2
..z σ的变化幅度较小,G F d /σ、d f σ的变化幅度
均较大,这与书上的结果并不相同。