轨检车检测原理及注意事项
- 格式:ppt
- 大小:6.15 MB
- 文档页数:11

铁二院轨检车使用说明说铁二院轨检车使用说明亲爱的用户,欢迎使用铁二院轨检车!本说明书将为您详细介绍如何正确、安全地使用轨检车,以确保您的工作顺利进行。
请您仔细阅读以下内容,并严格按照指导执行。
一、基本介绍铁二院轨检车是一种专门用于铁路轨道巡检的工具,具备高效、准确、可靠的特点。
它可用于检测轨道线路偏差、螺栓松动、钢轨磨损等问题,适用于各种应急维修和定期巡检任务。
二、安全操作1. 在使用轨检车之前,请确保您已经接受相关培训并获得操作许可。
2. 检查车辆整体状况,确保刹车、动力系统等关键部件正常运行。
3. 在使用轨检车之前,务必佩戴好安全帽、安全鞋和手套,以确保人身安全。
4. 在工作过程中,请严禁乘坐轨检车上的轨检设备或相关设施上,以免发生意外。
三、操作指南1. 在开始轨检任务之前,请仔细阅读并理解轨检车操作界面上的显示信息。
2. 准确输入巡检线路和任务信息,并确保轨检车连接到卫星导航系统,以获取精准的定位结果。
3. 根据任务要求,调整测量仪器的参数,并确保仪器处于正常工作状态。
4. 开始巡检后,在行驶过程中,及时观察并记录轨道偏差、螺栓松动、钢轨磨损等异常情况。
5. 若发现异常情况,请立即停车,并联系相关人员进行检修或维护。
6. 巡检任务结束后,将巡检得到的数据保存,并上传到系统中进行进一步分析。
四、维护保养1. 每次使用轨检车后,请对车辆进行外观检查,确保车身无明显损坏。
2. 定期检查并更换刹车系统、动力系统以及其他易耗件,确保车辆性能处于最佳状态。
3. 保持车辆内部清洁,并避免积水或其他污染物进入轨检设备内部。
4. 定期进行维护保养并严格按照操作手册中的维护计划进行。
五、注意事项1. 在使用轨检车时,请遵守当地法规和相关规定。
2. 请勿任意更改车辆结构或移除重要安全装置。
3. 在使用过程中如发现任何异常情况,请立即停车并及时联系维修人员。
4. 若遇到紧急情况,请立即采取相应措施,确保人身和车辆安全。
浅谈轨道检查车检测原理以及病害成因作者:廖望来源:《城市建设理论研究》2013年第14期摘要:本论文主要针对线路设备动态下的综合检测车、轨检车和静态下的轨道检查仪的检查数据,对铁路线路维修作业进行指导。
通过动静态数据对比,达到检测数据的现场精确定位,使动态下轨检车检查结果能直接反映到每米线路上,有效指导作业,同时对如何利用动态资料进行维修养护提出科学性的建议。
关键词:铁道工务轨道检测数据维修中图分类号:U491.2+27 文献标识码:A 文章编号:轨道检查车是检查轨道状态、查找轨道病害、评定线路动态质量、指导线路维修的动态检查设备,其作用是通过检查了解和掌握线路局部不平顺(峰值管理)、线路区段整体不平顺(均值管理)的动态质量,对线路养护维修工作进行指导,实现轨道科学管理。
一、检车检测项目:轨道几何参数:左高低、右高低、左轨向、右轨向、水平、轨距、三角坑、超高、曲率以及长波轨道不平顺;车体响应参数:车体横向加速度、车体垂向加速度;辅助评价参数:轨道质量指数、各单项轨道质量指数(也就是TQI值)(一)轨检车检测采集原理:车辆每前行一英尺(约300mm),计算机对各个检测项目采集数据一次,当某项目连续三次采集量都超过最低级病害界限值时,统计为一处病害,并取病害最大采集量值为该处超限病害的幅值,最低级病害起讫点为该处病害长度。
如图:1.高低病害检测原理及危害:高低是指钢轨顶面纵向起伏变化。
轨检车采用惯性基准的原理测量轨道变化的实际波型,得到高低变化的空间曲线,数据采集处理系统实施采集数据的间隔距离为0.305m,同时可换算成5米、10米、20米或其它弦长之测量法测量。
测量高低的传感器除了测量曲率、水平外,另外还有2个垂直加速度计。
通过车体位移,计算出轨面相对惯性空间的位移变化,进行必要的处理,得到高低数值。
监测范围±60mm,误差为±1.5mm高低摸拟弦长18.6米。
众所周知,高低不平顺(简称高低)会增加列车通过时的冲击动力,加速轨道结构和道床的变形,对车辆设备、列车行车安全构成危害,其危害大小与高低的幅值、变化率成正比,与高低波长成反比。
1 轨道检测车检测原理GJ-4型轨道检测车(简称轨检车)采用惯性基准测量原理和无接触测量方法,应用伺服跟踪、光电、陀螺、数字滤波等技术,采用先进的模拟-数字混合处理系统,传感器信号首先进入信号转接装置后,送入信号模拟预处理装置进行预处理。
预处理后的信号再通过信号转接及监视装置进入计算机数据处理系统,根据数学模型进行信号解偏、修正、补偿、滤波、合成计算出轨道几何参数,同时进行检测数据统计分析、摘取超限值、存储显示。
几何参数经D/A变换后,再经信号转接及监视装置后送至绘图仪以记录波形。
2 轨检数据说明维保部门反映根据检测缺陷数据在现场找不到对应的缺陷,或是现场根本不存在缺陷,根据轨检车设计原理需要更正几个观念。
2.1 里程误差GJ-4型轨检车使用的缺陷定位方法是人工设置里程,即在轨检车头尾两端各有一个里程设置键盘,检测过程中由操作人员观看现场里程标后在键盘中输入里程,传至检测系统形成缺陷数据里程。
因人为反应时间误差及两头设置里程的原因,致使检测的缺陷里程与现场会产生一定误差(见表1,下行,连续2次检测的同一处缺陷里程最大相差48 m)。
因此,现场核查时应在缺陷里程前后50 m内查找比较可靠。
2.2 正反向误差轨检车设计是根据轨检时面向轨检车发电机端为正方向,背向发电机端为反方向,而在确定左右高低、左右轨向时也与轨检车正方向有关,同时轨检车设计三角坑、水平项目正负也与正方向有关,而不是以轨道通常的上下行、左右轨定义,因此在现场查找缺陷时应先确定轨检车定义的正方向,进而判断缺陷存在的轨边及正负峰值。
轨检系统易受发电机振动影响,一般为不带动力,需要牵引机车牵引或推动检测。
受检测车两转向架轴重存在差异的影响,当机车牵引悬挂端不同,在推行或牵引过程中,由于动力因素作用,会导致设备检测梁产生不同程度的相对钢轨的位移,基于此,检测的轨道几何精度存在误差。
2.3 动态不等同于静态我国对动态检测设备的评价一直以检测精度作为主要指标。
GJ-5轨检车原理及应用GJ-5型轨检车原理及应用一、轨道动态检查技术的发展变化轨道动态检查相比静态检查,更准确,也更能反映线路真实情况,更能评价列车运行安全性指标,因此轨检车一直是检查轨道病害、指导线路养护维修、保障行车安全的重要手段。
我国轨道动态检查技术随着计算机技术和检测技术的发展得到迅速的发展,从二十世纪50年代的GJ-1型轨检车发展到目前的GJ-5型轨检车,检测精度和可靠性大大提高。
1、GJ-1型轨检车采用弦测法,机械传动,可以将轨距、水平、三角坑、摇晃(用单摆测量)项目的幅值绘在图纸上,人工判读超限并计算扣分。
2、GJ-2型轨检车仍采用弦测法,但改为电传动,检测项目比GJ-1型增加了高低,也是需要人工判读超限和计算扣分。
我局1988-1993年使用该型车。
3、GJ-3型轨检车于80年代初期研制成功,是我国轨检车技术的一次大飞越,采用先进的传感器技术、计算机技术和惯性基准原理,可以检测高低、水平、三角坑、车体垂直和水平振动加速度等项目,计算机采集各检测项目数据后,判断超限等级并计算扣分。
我局GJ-3型轨检车(SY997737)于1994年初开始运用,是全路GJ-3型运用时间最长的,也是用得比较好的。
a、1999年我局轨检车技术人员研发的Ⅲ型轨检车实用软件成果是工务部门汇总分析轨检车检查数据、指导养护维修线路的工具,它使轨检车的工作效率和工作质量得到了大大的提高,该成果达到了国领先水平,于2000年通过了局级鉴定,并于2002年获得路局科技进步三等奖。
b、为了均衡地提高线路养护维修的质量,我局轨检车技术人员研发了轨道质量指数(TQI)应用软件,并于2003年局工务维修会议上向各工务段推广应用,便于向各工务段掌握线路的动态质量,科学指导线路养护维修,真正做到状态修,收到了很好的效果。
c、2004年我局轨检车技术人员研发GPS(全球定位系统)自动校正里程系统,该系统能自动校正轨检车里程,消除轨检车测量的里程累计误差,便于各段准确定位检查病害处所,查找和整治线路病害,保证行车安全和提高线路保养质量。
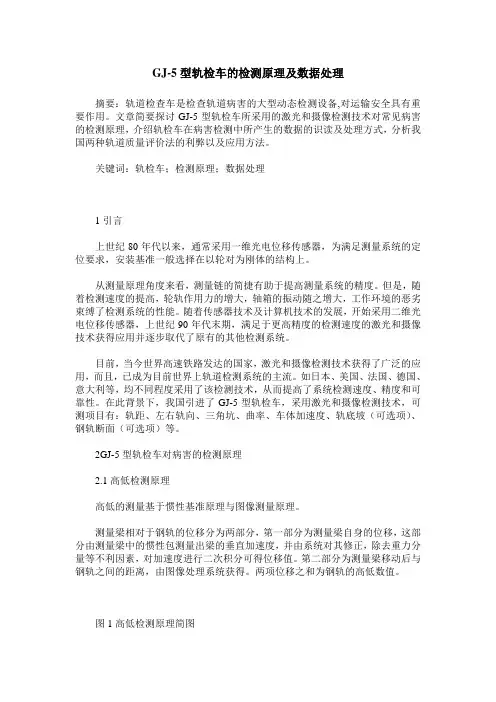
GJ-5型轨检车的检测原理及数据处理摘要:轨道检查车是检查轨道病害的大型动态检测设备,对运输安全具有重要作用。
文章简要探讨GJ-5型轨检车所采用的激光和摄像检测技术对常见病害的检测原理,介绍轨检车在病害检测中所产生的数据的识读及处理方式,分析我国两种轨道质量评价法的利弊以及应用方法。
关键词:轨检车;检测原理;数据处理1引言上世纪80年代以来,通常采用一维光电位移传感器,为满足测量系统的定位要求,安装基准一般选择在以轮对为刚体的结构上。
从测量原理角度来看,测量链的简捷有助于提高测量系统的精度。
但是,随着检测速度的提高,轮轨作用力的增大,轴箱的振动随之增大,工作环境的恶劣束缚了检测系统的性能。
随着传感器技术及计算机技术的发展,开始采用二维光电位移传感器,上世纪90年代末期,满足于更高精度的检测速度的激光和摄像技术获得应用并逐步取代了原有的其他检测系统。
目前,当今世界高速铁路发达的国家,激光和摄像检测技术获得了广泛的应用,而且,已成为目前世界上轨道检测系统的主流。
如日本、美国、法国、德国、意大利等,均不同程度采用了该检测技术,从而提高了系统检测速度、精度和可靠性。
在此背景下,我国引进了GJ-5型轨检车,采用激光和摄像检测技术,可测项目有:轨距、左右轨向、三角坑、曲率、车体加速度、轨底坡(可选项)、钢轨断面(可选项)等。
2GJ-5型轨检车对病害的检测原理2.1高低检测原理高低的测量基于惯性基准原理与图像测量原理。
测量梁相对于钢轨的位移分为两部分,第一部分为测量梁自身的位移,这部分由测量梁中的惯性包测量出梁的垂直加速度,并由系统对其修正,除去重力分量等不利因素,对加速度进行二次积分可得位移值。
第二部分为测量梁移动后与钢轨之间的距离,由图像处理系统获得。
两项位移之和为钢轨的高低数值。
图1高低检测原理简图2.2轨距检测原理轨距采用图像测量原理。
钢轨内外两侧激光器发出一扇形光带,垂直照射在钢轨上,在钢轨上形成一垂直断面。

轨检车的检测原理轨检车的检测原理:1、轨距的检测原理:GJ-4型轨检车所采用的轨距检测系统为激光光电伺服跟踪轨距测量装置。
在测量梁上安装激光光电传感器、位移计、驱动马达及伺服机械。
当钢轨产生位移,使轨距变化时,光电传感器感受其变化并输出相关电信号。
经调制解调器处理后,成为与轨距变化成线形比例的电压信号,再经过信号处理器、功放、驱动马达使光电传感器在伺服的推动下,发出的光束投身到左右股钢轨顶面下16mm处(16mm处是有效位置),跟踪钢轨位移。
经计算显示轨距。
(光电头被堵住、就不能检测轨距、同时也不检测方向)。
监测范围1415mm---1480mm +45mm、–20mm,误差为±1mm。
2.曲率的检测原理:曲率为一定弦长曲线轨道(如30米)对应的圆心角a,即、度/30m、度数大、曲率大、半径小。
反之,度数小、曲率小、半径大。
轨检车通过曲线时、测量轨检车每通过30米后车体方向角的变化值,计算出轨检车通过30米后的相应圆心角的变化值。
即曲率。
曲率、曲率变化率是检测曲线圆度的波形通道、仅供参考、不作考核内容。
能正确判断曲线正矢连续差和曲线的圆度。
曲率变化率的波形通道有突变、正矢肯定不好,(50×曲率)=正矢、如:某曲线曲率为0.46、正矢=50×0.46=23mm。
在直线上存在碎弯、小方向或轨距递减不好。
3、水平的检测原理:水平为轨道同一横断面内钢轨顶面之高差。
曲线水平称为超高。
GJ-4型轨检车采用补偿加速度系统测量水平,利用补偿加速度系统测量车体对地垂线滚动角,利用位移计测量车体与轨道相对滚动角,二者结合计算出轨道倾角。
利用两轨道中心线间距(1500mm)计算出水平值。
监测范围±200mm,误差±1.5mm。
4、高低的检测原理:高低是指钢轨顶面纵向起伏变化。
GJ-4型轨检车采用惯性基准的原理测量轨道变化的实际波型,得到高低变化的空间曲线,数据采集处理系统实时采集数据的间隔距离为0.305m,同时可换算成5米、10米、20米或其它弦长之测量法测量。
一、对轨检车检测性能应了解的内容:用轨检车对轨道进行动态检测,掌握线路在列车实际动载作用下、轨道几何尺寸偏差(四大项、是了解掌握线路局部不平顺、是峰值管理的考核内容)与相关的各项参数(曲线要素、区段总结报告、公里总结报告)及相应的轨道质量指数(各种偏差的加权平均值、TQI是了解掌握线路区段整体不平顺、是均值管理的考核内容)。
每250mm可测7项的加权平均值。
维规规定每200米质量指数大于15g,要按排维修。
对线路状态作出评价。
是线路动态质量检查的重要手段。
以便科学地指导线路养护维修工作。
即是工务管理科学化的一个重要组成部分。
也是上级领导衡量、考核设备状态的重要措施之一(应该说轨检车是为我们检查线路、发现问题、指导我们维修保养的工具,现已成为考核的工具、又提倡检后修。
这就需要我们努力、对我们的日常工作提出了更高的要求。
不过上级领导考核线路质量凭轨检车是比较科学的)。
并用于各级管理部门之间决策的依据。
要消灭轨检车三级分,就要了解掌握它的检测原理。
但是轨检车成绩好能代表线路基础好吗?也不完全说明线路质量好。
要认真对待。
如;-----。
我国利用轨道检查车检测动态已有40佘年的历史,经过更新、改造、引进技术、目前路局应用的是GJ-4型轨检车车号997990。
车底是160km/h(997740、997519是3型轨检车、车底是120km/h、997519、04年3季度已报废)(今天主要讲997990,因它出分多,优良率低,三级分时有发生)。
自1996年投入使用,(04年5—9月份在南京对车辆进行了大修,其它设备要逐步更换)。
它采用了当今世界上最先进的惯性基准检测原理,被设计成捷联式检测系统。
(现部轨检车已定GJ--5型)监测原理和GJ-4型一样,也是采用惯性基准的检测原理。
不一样的是它采用摄像形式,能看到就能监测到,包括钢轨飞边、垂直、侧面磨耗,还能测出脱轨糸数。
(公式:Q/P≤1.2。
Q表示横向力、P表示垂直力。
城市轨道交通动态检查--轨检车主要检测项目原理及危害分析摘要:本文主要针对轨检车检查项目:水平、三角坑、高低、轨距、轨向和车体振动加速度进行检测原理及危害成因分析,对现场进行检测,掌握现场的几何尺寸,分析可能产生的原因进行及时处理并跟踪分析,来保证列车运行。
关键词:轨检车城市轨道线路危害成因Abstract: This paper mainly for track inspection vehicle inspection items: horizontal, triangular pit, height, gauge, rail to body vibration acceleration detection theory and hazard cause analysis, on-site detection, master geometry of the scene, the analysis may producethe reasons for the timely processing and tracking analysis, to ensure that the trains run.Keywords: urban rail, line track ,inspection car, hazard causes.随着城市轨道交通的不断发展,动态检查密度也随着加大,动态检查已作为指导城市轨道交通线路养护维修的重要依据,因此,动态分析质量直接关系到线路养护维修优劣。
线路动态不平顺是指线路不平顺的动态质量反映,主要通过轨道检查车进行检测。
如何利用轨检车资料帮助现场找准病害及分析产生原因是技术人员分析工作的重中之重。
1、主要检测项目及性能指标轨道检查车对轨道动态局部不平顺(峰值管理)检查的项目为轨距、水平、高低、轨向、三角坑、车体垂向振动加速度和横向振动加速度七项。
各项偏差等级划分为四级:Ⅰ级为保养标准,Ⅱ级为舒适度标准,Ⅲ级为临时补修标准,Ⅳ级为限速标准。
浅谈工务轨道检查车检测工作要点摘要:本文对工务轨道轨检车检测工作进行了分析阐述,结合工作实际,对如何运用轨检车进行检测从整备工作和运用工作两个方面进行了论述,并进行了深入思考,对于做好轨检车检测工作有一定的借鉴作用。
关键词:工务;轨道检查车;检测工作轨道检查车(以下简称“轨检车”)轨检车是检查轨道状态,查找轨道病害,评定线路动态质量,指导线路维修,对线路进行动态检测的重要工具。
轨检车通过检查了解和掌握线路局部不平顺(峰值管理)、线路区段整体不平顺(均值管理)的动态质量,对线路养护维修工作进行指导,实现轨道科学管理。
其动态检测的准确性、高效性是人工静态检测和添乘仪检测所无法比拟的。
因此,做好轨检车的日常检测工作、为线路养护维修提供准确有效的依据,对提高线路质量、保障行车安全起到很大作用。
1轨检车的整备工作要点整备工作是日常检测的前期工作,是保证轨检车正常检测和安全行车的重要环节。
轨检车的整备工作主要包括以下三部分。
1.1供电设备轨检车具有独立供电系统,配备车上、车下两套柴油发电机组,它们是确保正常检测的重要组成部分,整备工作不容忽视。
车上发电机采用水冷却系统,冬季使用为主;车下发电及采用空气冷却系统,夏季使用为主。
整备工作包括(1)定期更换发电机机油、机油滤清器、空气滤清器、燃油滤清器,加注防冻液,清理发电机散热片、发电机室卫生等。
(2)蓄电池电解液缺失应及时补充,剩余电量过低应及时充电。
(3)日常检测前应提前半小时以上开机试运行,查看机油压力、缸温、水温、三相电压是否正常;配电柜及充电机是否正常工作;电路连接是否正常,有无虚联及漏电情况。
检测过程中应定期观察并做好记录1.2行车及其它设备行车及其它设备是保证行车安全及车上照明、用电、用水等基本生活的重要设备。
整备工作包括(1)冬季,入冬前应排空车下水箱并使用车上水箱;经常查看各管路电加热是否正常工作,排水管是否结冰堵塞;经常查看燃油锅炉油路及水管是否泄漏、电路是否虚联、光控开关是否清洁,车上油箱及时泵油保证燃油炉供油;空气压缩机储水罐及时清空。