otc机器人点检项目表
- 格式:xls
- 大小:147.50 KB
- 文档页数:1
O T C机器人维护保养标
准
标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
OTC机器人维护保养标准
定期的维护与检查是机器人正常运转所必需的,同时也能确保作业时设备与人员的安全。
检查时间为控制柜处于闭合状态下的时间。
1、日常检查
a)闭合电源前需要检查的项目
b)闭合电源后需要检查的项目
注意:确认无其他人员处于机器人工作范围内后才可闭合电源
2、定期检查
3、更换编码器电池
备份。
参数丢失。
更换前请切断机器人电源。
更换电池的顺序
(1) 检查电池的使用时间, 当超过 2
换新电池。
(2) 将图 2 中“A”所示的护盖(3 个护盖)卸
下。
拔下旧电池,插好新电池(事先将电
池固定用尼龙卡子卸下)。
或者当机器人显示“检查锂电池”信息示
再进行更换。
(3) 更换或检查电池结束后,将电缆插好,并
固定好尼龙卡子,最后上好 A 处护盖。
注意
请将-(负)极的橡胶护套更换到新电池上。
具体细节请与供应商联系。
电池的实际使用寿命有可能缩短。
连续使用(长时间闭合控制柜电源)可减少电池寿命。
焊机及附件、夹具部分
特别注意事项
1)机器人部分
2)电焊机及附件
3)焊材和保护气。
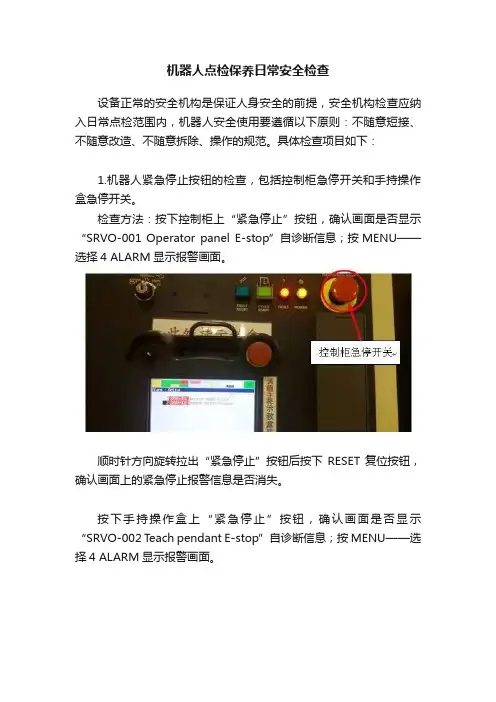
机器人点检保养日常安全检查设备正常的安全机构是保证人身安全的前提,安全机构检查应纳入日常点检范围内,机器人安全使用要遵循以下原则:不随意短接、不随意改造、不随意拆除、操作的规范。
具体检查项目如下:1.机器人紧急停止按钮的检查,包括控制柜急停开关和手持操作盒急停开关。
检查方法:按下控制柜上“紧急停止”按钮,确认画面是否显示“SRVO-001 Operator panel E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
按下手持操作盒上“紧急停止”按钮,确认画面是否显示“SRVO-002 Teach pendant E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
2.安全门及门开关的检查。
检查方法:机器人处于停止状态、控制柜模式开关处于AUTO位置、机器人没有显示任何报警信息。
拉开安全门,确认画面是否显示“SRVO-004 Fence open”自诊断信息;按MENU——选择4 ALARM显示报警画面。
关上安全门后按下系统复位按钮,确认画面上的门开关报警信息是否消失。
3.外部紧急停止开关的检查。
检查方法:机器人处于停止状态下、机器人没有显示任何报警信息,按下外部急停按钮;确认画面是否显示“SRVO-007 External E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
备注:R-30IB系列控制器安全信号全为双链规格,R-3IB MATE、R-30IA MATE、R-30IB、R-30IB MATE控制柜的安全门和外部急停信号连接于机器人控制器内E-stop板上,R-J3IB和R-30IA(R-J3IC)控制柜的安全门和外部急停信号连接于机器人控制内PANEL BOARD (配电盘)上。

OTC操作规程OTC操作规程1. 引言在使用OTC前,请仔细阅读本操作规程,并严格按照规程进行操作。
为了确保您的安全和的正常运行,本文档详细介绍了OTC的操作步骤和注意事项。
2. OTC概述2.1 OTC是一种用于在店铺、酒店、办公室等场所提供服务的自动化。
它能根据预设的程序和指令执行工作,如接待客户、送餐、清扫等。
2.2 OTC由硬件和软件组成。
硬件包括机身、传感器和执行器等部件,软件运行在的控制系统中。
3. OTC操作步骤3.1 开机与关机3.1.1 开机:将电源开关切换到ON位置,并等待系统启动完成。
3.1.2 关机:将电源开关切换到OFF位置,并确保完全停止运行后断电。
3.2 控制与导航3.2.1 使用遥控器:按下遥控器上的相应按钮控制的移动、停止等动作。
3.2.2 使用语音指令:在“听到”的情况下,通过语音指令控制的移动、停止等动作。
4. OTC安全注意事项4.1 安全操作4.1.1 保持周围的工作环境整洁,避免障碍物阻碍的运动。
4.1.2 使用遥控器时,确保与人员、设备以及其他保持安全距离。
4.1.3 禁止在运动时触摸或拆卸的任何部件。
4.2 电源管理4.2.1 定期检查电源线路和插头,确保其完好无损。
4.2.2 禁止将湿手插入电源插座或连接线路。
5. OTC维护与保养5.1 日常保养5.1.1 定期检查的传感器和执行器等部件,如发现故障或异常,及时通知维护人员。
5.1.2 清洁的外观,确保其整洁、无尘等。
5.2 维修与维护5.2.1 的维修和维护应由授权维修人员进行,禁止非专业人员进行操作。
附件:附件1:OTC操作指南附件2:OTC维护记录表法律名词及注释:1. OTC:OTC是Over-The-Counter的缩写,指场外交易。
OTC 是指在店铺、酒店、办公室等场所提供服务的自动化。
序号点检方
法
12345678910111213141516171819202122232425262728293031
1目视
2
目视试操作
3试操作4目视
5目视耳听
6目视
9
目视
耳听
处置人
气管
吸盘
吸盘无破损,无松动,弹簧回弹正常(图
四)
气管固定牢靠,运行过程与模具无干涉
7 8
异常记录
目视
目视
点检者
确认者
图
示
运行状态
机械手运行过程无异响,无抖动,与压力
机及模具无干涉
异 常 描 述发生时间处 置 内 容
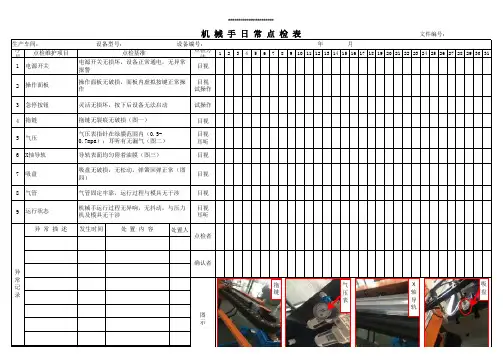
拖链拖链无裂痕无破损(图一)
气压
气压表指针在绿膜范围内(0.5-
0.7mpa);耳听有无漏气(图二)
X轴导轨导轨表面均匀附着油膜(图三)
电源开关
电源开关无损坏,设备正常通电,无异常
报警
操作面板
操作面板无破损,面板内虚拟按键正常操
作
急停按钮灵活无损坏,按下后设备无法启动
**********************
机械手 日 常 点 检表
生产车间: 设备型号: 设备编号: 年 月点检维护项目点检基准
拖链气
压
表
X
轴
导
轨
吸
盘
文件编号:
编制审核图一图二图三图四
批准
说明:“√”完好“Δ”异常,“×”待修“о”修好;。
OTC机器人焊接系统操作说明目录•系统概述与功能介绍•设备安装与调试•操作界面与基本操作•焊接工艺参数设置与优化•设备维护与保养•安全操作规程及注意事项•总结与展望PART01系统概述与功能介绍机器人本体焊接设备传感器系统控制系统OTC 机器人焊接系统组成01020304包括机器人臂、控制器、驱动器等部分,实现焊接过程中的各种动作。
包括焊接电源、焊枪、送丝机构等,用于提供焊接所需的能量和材料。
包括位置传感器、速度传感器、温度传感器等,用于实时监测焊接过程的状态和参数。
包括PLC 、触摸屏等控制设备,实现对整个焊接系统的集中控制和操作。
主要功能及特点可实现全自动或半自动的焊接过程,提高生产效率和产品质量。
采用先进的控制算法和传感器技术,确保焊接位置的准确性和稳定性。
可根据不同的工件和焊接要求,调整焊接参数和工艺,满足多样化的生产需求。
提供直观的操作界面和人性化的操作流程,降低操作难度和劳动强度。
自动化程度高焊接精度高适应性强操作简便适用范围和应用领域适用范围适用于各种金属材料的焊接,如钢、铝、铜等,可广泛应用于汽车制造、航空航天、船舶制造等领域。
应用领域可应用于车身焊接、框架焊接、管道焊接等多种应用场景,提高生产效率和产品质量。
PART02设备安装与调试确认设备清单检查设备外观准备安装工具确定安装位置设备安装前准备工作核对设备及其附件清单,确保所有部件齐全。
准备好所需的安装工具,如螺丝刀、扳手、水平仪等。
检查设备外观是否完好,无明显变形、损坏或锈蚀。
选择平整、开阔的安装场地,确保设备周围有足够的空间进行操作和维护。
安全防护安装好安全防护装置,如安全光栅、急停按钮等,确保操作安全。
接通电源,检查设备是否正常运行,有无异常声响或振动。
连接电缆将控制电缆、动力电缆等按照图纸要求连接好,确保连接牢固、无松动。
安装基座按照图纸要求安装基座,确保基座水平、稳固。
安装机器人本体将机器人本体安装在基座上,注意轻拿轻放,避免碰撞。

项目操作者 A 班: B班:零件简称/图号:工序号:日期:年ABABABABABABAB软连接气缸电极帽电极臂修磨器班组长/技术员签章夹具A班:B班:修磨刀架修磨刀架内无电极帽残留的铜削水气系统工作站4签章气水分离器项目负技术员/班组长每周检查一次、并签章确认机器人1水气3项目负责机修签章项目负责机修查看是否有需要维修的项目、并签章确认2工装无破损,功能正常台面无锈迹、飞溅等异物操作者签章操作者对以上内容检查无误后,签字确认基准块无焊接飞溅,无松动定位销无明显变形、损坏,无焊接飞溅,无松动、磨损气水分离器内没有水系统压力气压(0.5-0.70MP)、循环水压力(≥5.0Mpa)安全系统安全门在远控/在线模式下,打开安全门,机器人不工作安全光栅在作业工位遮挡安全光栅,机器人停止工作急停按钮按下急停按钮,在任何模式下机器人都停止工作夹紧臂螺栓紧固牢靠、无松动油嘴密封好、无漏油水汽管摆放整齐,无漏水、漏气夹紧放松动作顺畅限位块无松动,U型槽内无飞溅,无磨损气动元器件绝缘胶布无破损、电极臂对中、不漏水活塞轴、气缸气缸轴无飞溅、磨损,气缸不漏气本体基座螺栓螺栓等连接紧固件、无松动电缆电缆线无破损、连接处连接紧固轴周四周五周六周日焊枪断裂超过1/3破损更换电极帽修磨电极帽修磨后,被修磨面,色泽光亮无氧化层上下电极操作工TPM点检表---机器人设备序号系统检查点检查/维护内容检查标准周一周二周三沈阳上航发汽车零部件有限公司Shenyang shanghangfa Auto Parts Co Ltd编号:SSF-20(09)-003。
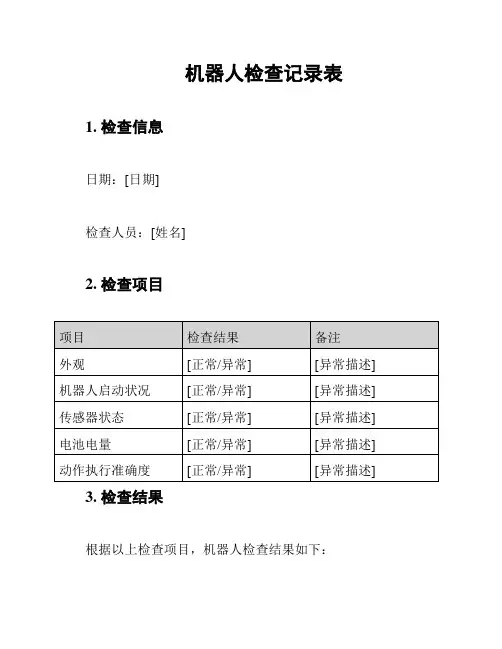
机器人检查记录表1. 检查信息
日期:[日期]
检查人员:[姓名]
2. 检查项目
3. 检查结果
根据以上检查项目,机器人检查结果如下:
- 外观:[正常/异常]。
若异常,请填写异常描述。
- 机器人启动状况:[正常/异常]。
若异常,请填写异常描述。
- 传感器状态:[正常/异常]。
若异常,请填写异常描述。
- 电池电量:[正常/异常]。
若异常,请填写异常描述。
- 动作执行准确度:[正常/异常]。
若异常,请填写异常描述。
4. 检查结论
根据检查结果,机器人的总体状况为:
- 机器人外观:[正常/异常]。
若异常,请填写异常描述。
- 机器人启动状况:[正常/异常]。
若异常,请填写异常描述。
- 机器人传感器状态:[正常/异常]。
若异常,请填写异常描述。
- 机器人电池电量:[正常/异常]。
若异常,请填写异常描述。
- 机器人动作执行准确度:[正常/异常]。
若异常,请填写异常
描述。
5. 下次检查安排
下次机器人检查计划安排在:[日期]
检查人员:[姓名]
6. 附件
可添加照片、视频或其他附件以进一步说明机器人检查情况。
> 注意:若机器人存在异常情况,请在备注或异常描述中详细描述,并进行必要的维修工作。
确保机器人能够正常运行,避免影响工作进程。
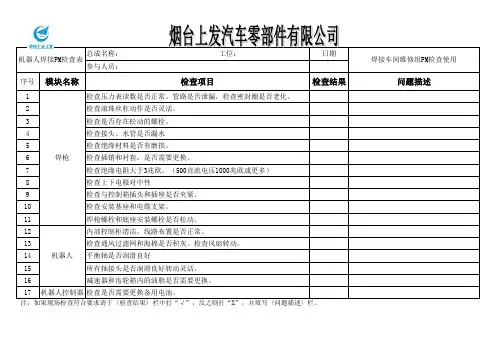
总成名称: 工位:
日期参与人员:序号
模块名称检查项目检查结果问题描述1
检查压力表读数是否正常。
管路是否泄漏,检查密封圈是否老化。
2
检查滚珠丝杠动作是否灵活。
3
检查是否存在松动的螺栓。
4
检查接头、水管是否漏水5
检查绝缘材料是否有磨损。
6
检查插销和衬套,是否需要更换。
7
检查绝缘电阻大于3兆欧。
(500直流电压1000兆欧或更多)8
检查上下电极对中性9
检查与控制箱插头和插座是否夹紧。
10
检查安装基座和电缆支架。
11
焊枪螺栓和底座安装螺栓是否松动。
12
内部控制柜清洁,线路布置是否正常。
13
检查通风过滤网和海棉是否积灰。
检查风扇转动。
14
平衡轴是否润滑良好15
所有轴接头是否润滑良好转动灵活。
16
减速器和齿轮箱内的油脂是否需要更换。
17机器人控制器检查是否需要更换备用电池。
焊接车间维修组PM检查使用焊枪机器人机器人焊接PM检查表。
⏹控制电源控制电源的开关装在控制器前面的门上,把手柄开关扭到“ON”位置上就接通了控制电源。
手柄开关向右扭到“ON”的位置,就接通了电源。
图1.1控制电源的手柄开关⏹操作盒在操作盒上安装了对基本动作进行控制所必须的最低限度数量的操作按键。
(A)急停按钮让机器人紧急停车时请按此钮。
急停按钮可以锁住。
若要解除急停功能,可按箭头方向旋转此按钮。
(B)自动方式按钮从示教方式切换到自动方式时,请按此钮。
变为自动方式时,指示灯亮。
(C)示教方式按钮从自动方式切换到示教方式时,请按此钮。
变为示教方式时,指示灯亮。
(D)伺服上电按钮接通伺服电源时,请按此钮。
伺服电源一接通,指示灯亮。
(E)起动按钮让作业程序开始自动运行时,请按此钮。
起动前,一定要确认在危险区域内无人。
(F)暂停停车按钮要想暂停自动运行中的程序时,请按此钮。
暂停时指示灯亮。
示教盒下面简单介绍示教盒各键的功能。
示教盒有两种类型:简易操作型和标准型。
示教盒的外观图1.2简易操作型示教盒图1.3标准型示教盒 各操作键的名称和作用示教盒上的各操作键具有如下功能:表1.1各操作键的名称及作用功能键下面介绍一下功能键的作用。
◆ 功能键的组成示教盒液晶显示画面的下边有五个功能键。
功能键具有如下所示的多层结构。
无论指定 哪个都能按顺序显示下一层的功能。
◆ 功能键的选定方法各功能键对应的功能在液晶显示屏的最下端进行显示。
按下功能键选择功能或数据。
功 能 键液晶显示画面同时最多只能显示5个功能键。
同一层的功能超过6个时,用功能键右端的>符号来表示。
按下键能显示6个以后的功能。
◆返回阶层要想返回功能键的第一层,按下切换键。
按动示教方式键能从最下一层返回到示教方式的最高层。
但是,使用作业程序编辑功能(搜索、顺序移动等)时能删除正在编辑中的条件文件。
若不能返回到最高级,就会发出警报声,在这种情况下,结束使用中的功能后再按一次示教方式键。
显示屏画面的构成屏幕显示当前正在进行的操作、信息等。
MOTOMAN机器人日常点检项目
【有无漏油】
发生油脂泄漏时,油脂可能侵入电机。
由于油脂泄漏引起电机故障时,请立刻与本公司联系。
详细说明:
1、原点标记在以下位置。
【准备的物品】无【作业时间:5 分】【步骤】
MOTOMAN机器人定期检查项目1、间隔1000小时检修:
详细说明:
(1)、【位置】
“底座螺栓”指地面或底座上的固定螺栓,有数处,如下图所示(4角各2个,共8个)。
【准备的物品】
【作业时间:5分】
(2)、【盖类螺栓检查】
【步 骤】
【位置】
【准备的物品】【作业时间:5分】【步骤】
(3)、【SLU轴电机插头插座的检查】【位置】在以下位置。
【准备的物品】无。
【作业时间:2 分】
【步骤】
(4)、【底座插座的检查】
【位置】在机器人背面下部。
【准备的物品】无。
【作业时间:2分】
【步骤】
2、间隔6000小时:补油。
打电话厂家进行维护。
3、间隔12000小时:换油。
打电话厂家进行维护。
4、间隔36000小时:更换机内导线(S,L,U,R,B,T轴)、XRC控制
柜机内电池。
5、油脂型号(Moly White RENo.00) S\L\U\R\B\T轴减速机用油,共
加油:约9500CC单台。
(理论值)
6、油脂型号(Alvania EP Grease2) 平衡杠齿轮用油共加油:约10CC
单台。
(理论值)
MOTOMAN机器人有限公司. 董会 2009.5.20.。