开题报告-四自由度机械手结构设计及其plc控制
- 格式:doc
- 大小:35.50 KB
- 文档页数:8

一、选题的理论意义与实际意义机械手在当今工业中有着举足轻重的作用,能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手技术设计的学科相当广泛,其一,它能部分的代替人工操作;其二,它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工作的传送和装卸;其三,它能操作必要的机具进行焊接和装配,从而的改善了工人的劳动条件,显著的提高了生产率,加快实现工业生产机械化和自动化的步伐,我国近几年也有较快的发展,并且取得一定的效果。
但是归结起来是机械学和微电子技术的应用,特别是计算机技术的应用密切相关。
因此,机械手技术的发展必将带动其他技术的发展,机械手技术的发展和应用水平也可以从一个方面验证一个国家科学技术和工业技术的发展和水平,机械手由于其显著的优点而受到特别重视,机械手是工业机器人的一个重要分支,是提高生产率,对改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段。
PLC是以现代微处理器技术为核心的控制器,作为一种通用的工业控制器,其靠性高、抗干扰能力强:PLC由于采用现在大规模集成电路技术,采用严格的生产工艺制造,内部电路采取了先进的抗干扰技术,具有很高的可靠性,此外PLC带有硬件故障自我检测功能,出现故障是可以及时发出警报信息:PLC采用光电隔离和滤波技术有效抑制外部干扰源对PLC的影响,此外PLC 还可在强、通用性好;开发周期短,功耗小。
对现代工业的发展具有很重要的意义。
同时在理论方面对于PLC控制的机械手设计提供一定的理论上的借鉴的意义。
二、论文综述国内外有关的学者对于PLC控制的机械手设计进行了相关的研究,并且取得了一定的研究的成果,具体的研究的成果如下所示:(一)国内研究现状胡炜(2018)认为:机械手虽然还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越广泛地得到了应用。
plc控制机械手开题报告PLC控制机械手开题报告一、引言在现代工业生产中,机械手作为一种自动化设备,广泛应用于各个领域。
机械手的运动控制是其核心技术之一,而PLC(可编程逻辑控制器)作为一种常用的控制器,被广泛应用于机械手的运动控制中。
本报告旨在探讨PLC控制机械手的原理、应用和优势。
二、PLC控制机械手的原理PLC控制机械手的原理是通过PLC控制器对机械手的各个关节进行精确的运动控制。
PLC控制器通过读取传感器的信号,判断机械手当前的位置和状态,并根据预设的程序进行相应的控制操作。
PLC控制器通过输出信号控制机械手的电机、气缸等执行机构,实现机械手的运动。
三、PLC控制机械手的应用1. 工业生产线:在工业生产线上,机械手可以代替人工完成重复性、繁琐的工作,提高生产效率和质量。
PLC控制机械手可以根据不同的工作需求,实现不同的动作模式和路径规划,适应不同的生产任务。
2. 仓储物流:在仓储物流领域,机械手可以实现货物的装卸、搬运和堆放等操作。
PLC控制机械手可以通过与仓储管理系统的联动,实现自动化的物流操作,提高仓储效率和准确性。
3. 医疗领域:在医疗领域,机械手可以用于手术辅助、药品配送等工作。
PLC控制机械手可以实现高精度的运动控制,提高手术的安全性和准确性。
四、PLC控制机械手的优势1. 灵活性:PLC控制机械手的程序可以根据实际需求进行灵活的修改和调整,适应不同的工作任务和工作环境。
2. 精确性:PLC控制机械手可以实现高精度的运动控制,可以精确到毫米甚至更小的尺度,提高工作的准确性和稳定性。
3. 可靠性:PLC控制机械手采用模块化设计,具有较高的可靠性和稳定性。
同时,PLC控制器还可以实现故障诊断和报警功能,及时发现和解决问题。
五、结论PLC控制机械手作为一种自动化设备,具有灵活性、精确性和可靠性等优势,在工业生产、仓储物流、医疗领域等各个领域得到广泛应用。
通过PLC控制器对机械手的运动进行精确控制,可以提高生产效率、减少人力成本,并且可以应对不同的工作需求和环境变化。
前言可编程控制器是20世纪70年代以来,在集成电路,计算机技术基础上发展起来的一种新型工业控制设备。
由于具有功能强、可靠性高、配置灵活、使用方便以及体积小、重量轻等优点,国外已广泛应用于自动化控制的各个领域,并已成为现实工业生产自动化的支柱产品。
近年来,国内在PLC技术与产品开发应用方面发展很快,除有许多从国外引进的设备,自动化生产线外,国内的机床设备已越来越多采用PLC控制系统采用控制系统取代传统的继电—接触器控制系统小;价格上能与继电—接触器控制系统竞争;易于在现场变更程序;便于使用、维护、维修;能直接推动电磁阀,接触器与之相当的执行机构;能向中央执行机构;能向中央数据处理系统直接传播数据等。
本课题是基于PLC控制四自由度机械手运行。
工业机械手是一种模仿人体上肢部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,它可以代替手的繁重劳动,改善劳动条件,提高劳动生产率和自动化水平。
有着广阔的发展前途。
本课题通PLC自动控制对机械手实现机械手规定动作并实现回原点、手动方式和自动方式三种工作方式的选择,并对系统进行运行效率分析。
摘要随着工业机械手的进一步发展,其发展将更趋向于人性化、智能化并将在更加广泛的领域得到应用。
机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
因而具有强大的生命力,受到人们的广泛重视和欢迎。
工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,提高劳动生产率和自动化水平。
通过对机械制造与自动化大学专科三年的所学知识进行整合,对工业机械手各部分机械结构和功能的论述和分析,确定机械手的工作原理和运动机理。
设计了一种四自由度机械手,采用可编程序控制器(PLC)设计其控制系统,以提高其工作的稳定性能。
关键词:机械手梯形图PLC 电磁阀AbstractWith the further development of industrial robots, and its development tends to be more humane, intelligent and in a wider range of applications. Manipulator is a kind of imitation of the upper body movement machine, it can be scheduled according to request type or holds the automation tool operation of technical equipment, industrial automation, promote the production of industrial production of the further development plays an important role .Manipulator noted extensively and welcome by people for it has powerful vitality. Industrial robots can replace the hands of heavy labor, significantly reduce labor intensity, and improve labor productivity and automation level.Mechanical manufacturing and automation through the junior college for three years to integrate the knowledge of industrial manipulator mechanical structure and function of various parts of exposition and analysis to determine the robot motion principle and mechanism. Design a four-DOF manipulator to enhance the stability of their work for using the programmable logic controller to control system.Keywords: Manipulator Ladder diagram PLC Solenoid valve目录前言 (1)摘要 (2)第一章绪论 (5)1.1 本课题设计的背景 (5)1.2本课题设计的内容 (6)1.3 本课题设计的目的和意义 (7)第二章 PLC的概述 (8)2.1 PLC介绍 (8)2.2 PLC的构成 (9)2.3 PLC 的外部设备 (10)2.4 PLC的工作原理 (10)2.5 PLC的优点 (12)第三章基于PLC的机械手控制方案的确定 (13)3.1 机械手的概述 (13)3.2 采用PLC控制机械手的优点 (13)3.3 机械手设计内容 (13)3.4 PLC的选型 (14)3.5 三菱FX系列的结构功能 (16)第4章功能实现与控制方式 (18)4.1 机械手模型的机能和特性 (18)4.2 夹紧机构 (18)4.3 躯干 (19)4.4 旋转编码盘 (19)第5章控制系统设计 (20)5.1 控制系统硬件设计 (20)5.2 PLC梯形图中的编程元件 (20)5.3 PLC的I/O分配 (21)5.4 机械手控制系统的外部接线图 (22)5.5 控制系统软件设计 (22)致谢 (36)参考文献 (37)附录(指令表) (38)第一章绪论1.1 本课题设计的背景1969年美随着现代工业技术的发展,工业自动化技术越来越高,生产工况也有趋于恶劣的态势,这对一线工人的操作技能也提出了更高的要求,同时操作工人的工作安全也受到了相应的威胁。
毕业设计(论文)开题报告1 选题背景及其意义1.1 课题来源本课题来自教师科研课题、教学需求和社会需要,是设计一种性能先进、满足教师教学、学生实践和模拟工业化生产的,基于单片机控制的四自由度气动机械手。
它简化了结构,增加了可控性,可实现机械手在XY平面的旋转,大小臂的升降、伸缩,手爪的抓紧和放松等功能,并配合物料台的自动送料,实现水平面定点取物和放物的功能,具有结构简单、操作方便、可靠性高等特点,为机电一体化教学提供了很好的范例,为工业化生产提供实用的机械手系统。
1.2 课题目的机器人技术是一种利用电子技术、信息技术使机械系统实现柔性化和智能化的自动化技术,在工科高校的本科教育和研究生培养中,占有举足轻重的地位,对于提高学生的工程能力,拓展生存空间有着非常重要的意义。
机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人在生产中位置,提高自动化水平和劳动生产率,可以减轻劳动强度、保证产品质量、能在有害环境(高温高压,低温低压,有毒气体、放射性等)下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
在工业生产线中,机械手臂具有很广泛的用途。
它是工作抓取和装配系统中的一个重要组成部分。
它的基本作用是从指定位置抓取工件运送到另一个指定的位置进行装配。
机械手臂代替了人工的繁杂劳动,并且操作精度高,提高了产品的质量和生产效率。
近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。
电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求;微电子技术的引入,促进了电气比例伺服技术的发展。
目前我过的工业机器人技术及其应用水平与国外相比,还是有着一定的差距,应用规模和产业化水平低,机械手的研究和开发直接影响到我国自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。
四自由度链式机械臂系统设计与实现的开题报告一、选题背景和意义随着工业自动化技术的不断发展,机器人技术已经成为现代工业中不可或缺的一部分。
机器人广泛应用于工厂生产线、医疗保健、教育和科学研究等领域。
机器人的关键是机器人手臂,机器人手臂是承担机器人动作任务的核心部件,是机器人实现自主操作的关键。
因此,机器人手臂系统的设计和实现对机器人技术的发展和应用具有重要意义。
本选题以四自由度链式机械臂为研究对象,旨在设计和实现一种高效、精确、稳定的机器人手臂系统,以满足不同领域的应用需求。
通过研究机械臂运动学、动力学和控制理论,开发一种具有良好性能和稳定性的机器人手臂系统,为机器人的广泛应用和推广做出贡献。
二、研究目的1.研究机械臂运动学和动力学理论,掌握机械臂的基本构成和运动原理。
2.设计和实现四自由度链式机械臂系统,包括机械臂简化模型、运动平台设计和链式机械臂控制系统。
3.对机械臂运动学、动力学和控制进行建模和仿真分析,验证机械臂系统设计的可行性和稳定性。
4.通过实验结果分析,评估机械臂系统的性能和稳定性,为机器人技术的应用和推广提供有价值的参考。
三、研究内容1.机械臂运动学和动力学的原理和理论,包括机械臂的基本构成、坐标系的建立、关节运动、运动学分析和动力学分析等内容。
2.机械臂系统设计和实现,设计四自由度链式机械臂的简化模型、运动平台和链式机械臂控制系统。
3.机械臂运动学、动力学和控制的建模和仿真分析,对机械臂进行运动学和动力学建模,进行仿真分析,并对控制系统进行设计和实现。
4.机械臂系统的性能分析和评估,通过实验结果分析,评估机械臂的性能、稳定性和应用效果。
四、研究方法和流程1.文献调研,收集机械臂系统的相关理论和实践应用资料。
2.机械臂系统的设计和实现,包括机械臂简化模型的构建、运动平台设计和链式机械臂控制系统的实现。
3.机械臂的运动学、动力学和控制建模和仿真,利用MATLAB、Simulink等软件进行建模和仿真。
一、选题的意义及国内(外)的研究概况目前国内外的技术水平现状:工业机械手是近几十年发展起来的一种高科技自动化生产设备。
工业机械手的是工业机器人的一个重要分支。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
我国现有机器人研究开发和应用工程单位200多家 ,其中从事工业机器人研究和应用的有75家 ,共开发生产各类工业机器人约800台 ,90%以上用于生产中 ,引进工业机器人做应用工程的约500台。
计算机控制系统是在自动控制技术和计算机技术发展的基础上产生的。
在经济全球化的浪潮中,降低人力成本,提高生产率,缩短订单处理时间等已成为生产企业的不断追求。
为了达到这一目标,它们越来越依赖于新一代的硬件和软件系统。
近年来,由于个人计算机(简称PC)的高速率和对硬件与软件的几乎无限制的开放,使得PC的应用迅猛增长。
将PC机CPU的高速处理性能和良好的开放性引入到计算机控制领域,形成了基于PC的控制系统。
随着计算机控制技术在机械手应用中的不断深入,具有独立控制器、程序可变、动作灵活、定位精度高、适用于可变换品种中小批量自动化生产的通用机械手得到迅速发展。
各国大企业工业机械化生产过程不同程度实现了工业机械手的计算机控制。
伴随着机电一体化在各个领域的应用,机械设备的自动控制成分显得越来越重要,由于工作的需要,人们经常受到高温、腐蚀及有毒气体等因素的危害,增加了工人的劳动强度,甚至于危机生命。
因此机械手就在这样诞生了,机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。
其中的工业机械手是近代自动控制领域中出现的一项新技术,它的发展是由于其积极作用正日益为人们所认识:它能部分地代替人工操作;能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;能制作必要的机具进行焊接和装配从而大大改善工人的劳动条件,显著地提高劳动生产率,加快实现工业生产机械化和自动化的步伐。
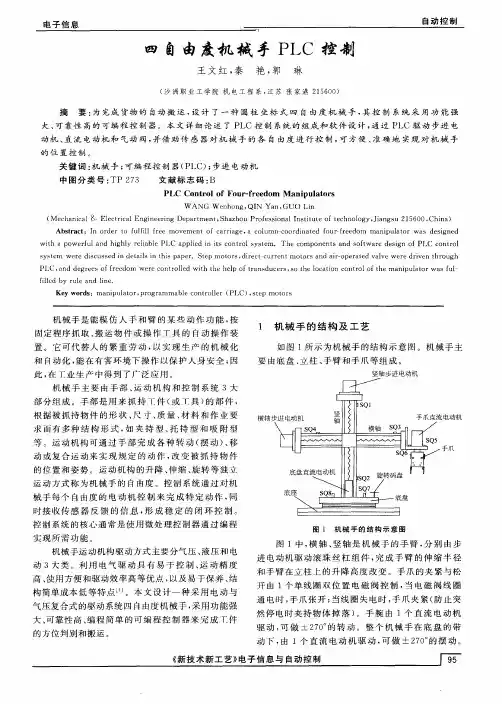
基于PLC的四自由度电动机械手的控制设计摘要:所介绍的电动机械手由电控机械手、yz轴丝杠组、手转动机构、旋转底盘等机械部分组成,在PLC 控制下,它可在行程范围内将物体从一点搬运至另一任意点,可置放于各种不同生产线或物流流水线中。
关键词:机械手;PLC;步进电机中图分类号:TP241 文献标志码:A文章编号:Design of the Control System of 4-dimension Motor-driven Mechanical Manipulator Basedon PLCAbstract: Motor-driven mechanical manipulator disscussed in this paper consists ofpower-operated mechanical manipulator,y-axis and z-axis screw lever modules ,rotatry mechanism of manipulator,rotated-plate at the bottom etc. On the control of PLC system,it can take bodies from one place to another in the range of its journey. It can be placed on different manufacture assembly lines or goods circulation lines.Key Words:mechanical manipulator; PLC; step motor随着微电子技术、计算机和现代控制理论的不断完善,机械手技术也快速发展。
按实现功能和驱动方式划分,机械手可以分为很多种。
仅就驱动方式,就有气动(或液动)、电动和电气混合等。
为实现不同的功能,有3个自由度的,也有4、5个自由度的,甚至还有6个自由度的。
plc机械手控制开题报告PLC机械手控制开题报告一、引言PLC(Programmable Logic Controller)是一种特殊的计算机控制器,广泛应用于工业自动化领域。
机械手作为一种重要的自动化设备,其控制系统的稳定性和精确性对于生产效率和产品质量至关重要。
本文旨在探讨PLC机械手控制系统的设计与优化,以提高生产线的效率和可靠性。
二、PLC机械手控制系统的设计要求1. 系统稳定性:机械手控制系统对于运动的精确性和稳定性要求较高,需要能够准确控制机械手的位置、速度和力度。
2. 灵活性:机械手在工业生产中需要适应不同的工件和工艺要求,控制系统应具备一定的灵活性,能够快速适应不同的生产需求。
3. 安全性:机械手在工作过程中需要保证操作人员的安全,控制系统应具备相应的安全保护机制,如碰撞检测和急停功能。
4. 可扩展性:随着生产需求的变化,机械手控制系统可能需要进行升级或改造,因此控制系统应具备一定的可扩展性,能够方便地进行系统升级或扩展。
三、PLC机械手控制系统的硬件设计1. PLC选择:根据实际需求,选择适合的PLC型号和规格。
常见的PLC品牌有西门子、施耐德、三菱等,根据需求选择合适的品牌和型号。
2. 传感器选择:机械手控制系统需要使用传感器来获取机械手的位置、速度和力度等信息。
根据具体的应用场景选择合适的传感器,如光电传感器、压力传感器等。
3. 执行器选择:机械手的动作需要通过执行器来实现,如气缸、伺服电机等。
根据机械手的负载和运动要求选择合适的执行器。
四、PLC机械手控制系统的软件设计1. 编程语言选择:PLC的控制程序可以使用多种编程语言进行编写,如Ladder Diagram(梯形图)、Structured Text(结构化文本)等。
根据实际需求选择合适的编程语言。
2. 程序逻辑设计:根据机械手的工作流程和逻辑要求,设计相应的程序逻辑,包括机械手的运动控制、传感器数据的处理和安全保护机制等。
基于plc的机械手控制系统设计开题报告一、引言随着工业化发展的不断加快,机械手在生产过程中越来越多地受到重视,它能够实现效率高、成本低的自动化装配。
而机械手控制系统的设计一直是当今最具前景的研究课题之一。
现代机械手控制系统一般采用PLC作为控制器,因为PLC具有快速反应、可靠性高、灵活性强等优势,能够快速准确地实现机械手的控制。
本文将从以下几个方面对基于PLC的机械手控制系统设计进行研究: 1. 简要介绍机械手及其控制原理;2.PLC技术及其在机械手控制中的应用;3. 设计机械手控制系统的主要步骤;4.对机械手控制系统的有效性进行分析。
二、机械手及其控制原理机械手是一种具有多轴运动的装置,由传感器、传动机构和控制系统组成,能够根据信号或者程序实现多轴运动,完成特定的操作任务。
机械手的控制原理是根据转子位置信号控制传动机构,使机械手实现多轴运动,从而完成操作任务。
具体来说,机械手的控制系统一般由传感器、控制器、传动机构等组成,传感器负责采集转子位置信号,控制器根据信号计算出控制命令,传动机构接收并执行控制命令,从而实现机械手的多轴运动。
三、PLC技术及其在机械手控制中的应用PLC(Programmable Logic Controller)是一种可编程的逻辑控制器,它由微处理器、存储器、I/O模块和外围设备组成。
它具有快速反应、可靠性高、灵活性强等特点,能够快速准确地实现机械手的控制。
PLC在机械手控制中的主要应用有:1. PLC可以根据传感器输入的转子位置信号,快速准确地计算出控制命令,从而实现机械手的多轴运动;2.PLC可以根据程序自动执行多个机械手操作步骤,实现连续化生产;3. PLC可以根据实时输入的信号,实现机械手的自适应控制,使之能够在不同的环境中运行。
四、设计机械手控制系统的主要步骤1. 需求分析:根据实际工况,分析机械手控制系统的功能需求,确定系统的性能要求;2. 系统结构设计:确定机械手控制系统的结构,并设计控制器、传感器、传动机构等硬件的选型;3. 系统软件设计:根据系统的功能特点,设计PLC程序,使机械手能够根据信号或者程序实现多轴运动;4. 系统调试:调试机械手控制系统,完成系统的调试工作,使机械手能够正常运行;5. 系统实施:将机械手控制系统投入到实际工况中,实施系统,使机械手能够实现自动化装配。
四自由度码垛机器人设计及其控制系统性能研究的开题报告一、选题背景随着工业自动化技术的发展,码垛机器人成为了越来越多生产厂家,特别是物流行业的首选设备。
传统的生产线需要通过人工来完成产品的码垛工作,这样既费时又费力,而且还存在着生产效率低,误码率高等问题。
与传统生产线相比,码垛机器人具有自动化程度高、生产效率高、操作稳定性高等优点。
因此,如何设计一种高效、高精度、高可靠的码垛机器人成为了一个热门的研究方向。
码垛机器人通常采用四自由度机器人进行机械结构设计。
其控制系统由软件和硬件两部分组成,其中硬件部分包括控制器、电机等设备,软件部分主要包括机器人控制程序、机器人仿真软件等。
如何优化码垛机器人的控制系统,提高其性能,是码垛机器人研究的一个重要领域。
因此,本文将研究四自由度码垛机器人的机械结构设计以及其控制系统的性能优化。
二、研究内容和方法1.研究对象本文的研究对象为四自由度码垛机器人,其中机械结构设计和控制系统优化为两个研究方向。
2.研究内容(1)机械结构设计机械结构设计是码垛机器人的核心,影响着机器人的稳定性、精度和负载能力。
本文将研究四自由度码垛机器人的机械结构设计,包括机器人臂的长度、工作空间、承重能力等参数的优化设计,以及机械臂运动轨迹的规划。
(2)控制系统优化控制系统是码垛机器人实现精准操作的关键因素,直接决定了机器人的控制精度和速度。
本文将对控制系统的硬件和软件进行研究,在硬件方面研究控制器和电机的选择、安装和调试等问题,在软件方面研究机器人控制程序的编写、PID控制算法的实现以及机器人仿真软件的应用。
3.研究方法本文采用理论研究和实验研究相结合的方法,包括如下几个方面:(1)理论分析在机械结构设计方面,本文将采用数学建模和计算机辅助设计的方法,通过对机器人的运动学和动力学进行分析,对机器人的工作空间、承重能力等参数进行优化设计。
在控制系统优化方面,本文将采用控制理论进行分析和优化。
(2)实验研究本文将实现码垛机器人的机械结构和控制系统的设计,并进行实际的性能测试和验证。
四个自由度气动机械手结构设计四个自由度气动机械手是一种具有四个独立运动自由度的机械手,常用于工业生产线上的自动化操作。
它采用了气动驱动技术,能够在高速下快速、准确地完成各种复杂任务。
在这篇文章中,将介绍四个自由度气动机械手的结构设计。
四个自由度气动机械手一般由基座、转台、前臂、前臂臂杆以及末端执行器等主要部件组成。
其中,基座是机械手的支撑部分,承载机械手的整体结构;转台是机械手的第一旋转关节,使机械手能够在水平面上进行转动;前臂是机械手的第二旋转关节,使机械手能够在竖直方向上进行旋转;前臂臂杆是机械手的伸缩部分,通过伸缩前臂臂杆,可以使机械手的工作范围更加灵活;末端执行器是机械手的最后一个关节,通过末端执行器可以实现机械手的精确定位和抓取动作。
在四个自由度气动机械手的设计中,需要考虑以下几个方面:结构刚度、重量、精度和可靠性。
首先,结构刚度是机械手设计的重要指标之一、为了保证机械手在高速运动中不产生振动和形变,需要采用合适的结构材料和设计参数,提高机械手的整体刚度。
其次,重量是机械手设计的另一个重要指标。
较轻的机械手可以提高其加速度和速度,使其能够更快地完成任务。
因此,在设计中需要尽量减小机械手的自重,采用轻量化的材料。
第三,精度是机械手设计的关键要素之一、在一些需要高精度定位和抓取的任务中,机械手需要具备较高的精度。
在设计中,需要合理选择驱动器、传感器和控制系统,以确保机械手的精确定位和抓取动作。
最后,可靠性是机械手设计的关键要素之一、机械手在工作过程中需要承受较大的负载和惯性力,因此需要采用可靠的结构和驱动系统,以保证机械手在长时间工作中不发生故障。
总结而言,四个自由度气动机械手的结构设计涉及结构刚度、重量、精度和可靠性等多个方面。
在设计过程中,需要综合考虑这些因素,选择合适的驱动器、传感器和控制系统,以实现机械手的高速、准确和可靠的运动。
这样的机械手在工业生产线上能够提高生产效率,实现自动化操作。
四自由度多用途气动机器人(机器手)结构设计及控制实现近几十年,随着全球科学技术的快速发展和信息化水平不断提高,出于解放劳动力、提高生产效率、经济效益和减少生产成本的目的,很多工业领域开始使用工业机器人进行生产运作。
为了加深对机器人从设计到工业应用具体是怎样实现的,文章先对工业机器人的发展背景进行阐述,再对机器人(机械手)的机构设计进行介绍,其中包括手部、手腕、手臂等的设计,最终利用可编程序控制器对机器人(机械手)进行有效控制,使机器人(机械手)能够正常运作,进而出现在在更多生产企业的工作线上。
机器人(Robot)一词最早出现在国外,二十世纪中后期开始才得到人们的广泛关注,并被人们所熟悉,现如今,在国外,甚至国内有些工厂、企业都可以看得机器人的身影。
现代的工业机器人(机器手)主要有可编程、拟人化、通用性、运用广泛这四个特点。
科学技术的提高和不断创新,使得当今的工业机器人逐渐具备行走、感知、交流等多种能力。
目前,美国和日本在机器人的研发方面处于世界领先水平,对全球机器人的发展最具影响。
绝大多数工业机器人都是由主体、驱动系统和控制系统三个部分组成。
其中主机包括臂部、腕部、手部等,大多数机器人有3-6个运动自由度,文章以下以四个自由度为例进行描述。
机器人(机械手)在工业生产过程中能够代替人做些单调、频繁或者重复率强的长时间工作,但是机器人又不是简单意义上的完全复制了人工的劳务,而是在综合了人的工作性能的基础上再结合了机器人其专有的特长。
机械手是模仿人手和手臂的某些功能,在设置的特定程序下抓取、搬运物件或者操作工具的自动操作装置。
机器人的发展历史经历了一系列阶段,其中机械手则是最早出现的工业机器人,机械手在工业生产中的应用能够有效地减省工人、提高生产效率、降低生产成本、提高产品的品质提升工厂形象,尤其是在某些特殊的环境下,如高温高压、有毒有害、易燃易爆、放射性较大等,机器手得到了广泛的运用。
机器人(机器手)结构设计本次设计的机械手是通用气动上下料机械手,其在工业生产有较为广泛的运用。
机械手开题报告一、项目背景。
随着工业自动化程度的不断提高,机械手作为一种重要的自动化设备,被广泛应用于生产线上的物料搬运、组装、焊接等工作中。
机械手的出现不仅提高了生产效率,降低了劳动强度,还能够保证产品质量的稳定性和一致性。
因此,研究和开发高性能、高精度的机械手对于提升工业生产水平具有重要意义。
二、项目意义。
本项目旨在研究开发一种新型的机械手,具有更高的运动精度、更快的响应速度和更强的负载能力,以满足工业生产对机械手的高要求。
通过该机械手的应用,可以进一步提高生产线上的生产效率,降低生产成本,提高产品质量,从而增强企业的竞争力。
三、项目内容。
1. 机械手结构设计,本项目将对机械手的结构进行优化设计,包括关节的布置、传动装置的选用、执行器的选择等,以确保机械手具有良好的运动性能和稳定性。
2. 控制系统设计,针对机械手的运动控制需求,将设计相应的控制系统,包括传感器的选型、控制算法的开发等,以实现机械手的高精度、高速度的运动控制。
3. 功能验证与性能测试,在机械手的研发过程中,将进行多种功能验证和性能测试,包括负载能力测试、运动精度测试、响应速度测试等,以确保机械手的各项性能指标达到设计要求。
四、项目预期成果。
1. 设计制造一台新型高性能机械手原型,并完成运动控制系统的研发。
2. 实现机械手的高精度、高速度运动控制,并通过性能测试验证其稳定性和可靠性。
3. 提出机械手的应用方案,并在实际生产线上进行试验应用,验证其在工业生产中的效果。
五、项目进度计划。
1. 项目启动阶段,完成机械手的结构设计和控制系统的初步方案确定。
2. 项目中期阶段,完成机械手原型的制造和控制系统的开发。
3. 项目后期阶段,完成机械手的功能验证和性能测试,并进行应用试验。
六、项目预算。
本项目预计总投资为100万元,其中包括材料采购、设备购置、人员费用、试验费用等。
七、项目风险分析。
1. 技术风险,机械手的结构设计和控制系统的研发存在一定的技术难度,需要克服各种技术难题。