【机械设计】11-02 普通圆柱蜗杆传动的主要参数
- 格式:pptx
- 大小:1.37 MB
- 文档页数:5
普通圆柱蜗杆传动的基本参数及几何尺寸计算1.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
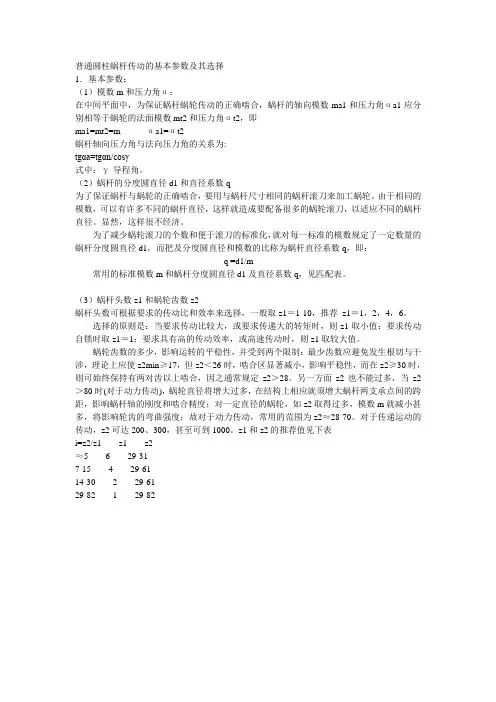
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
对于传递运动的传动,z2可达200、300,甚至可到1000。
z1和z2的推荐值见下表(4)导程角γ蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距p a与蜗杆导程p z的关系为p z=z1p a,由下图可知:tanγ=p z/πd1=z1p a/πd1=z1m/d1=z1/q导程角γ的范围为3.5°一33°。
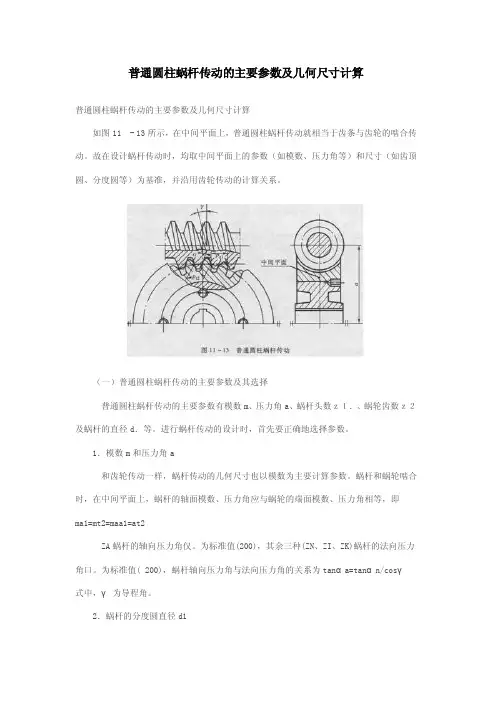
普通圆柱蜗杆传动的主要参数及几何尺寸计算普通圆柱蜗杆传动的主要参数及几何尺寸计算如图11 - 13所示,在中间平面上,普通圆柱蜗杆传动就相当于齿条与齿轮的啮合传动。
故在设计蜗杆传动时,均取中间平面上的参数(如模数、压力角等)和尺寸(如齿顶圆、分度圆等)为基准,并沿用齿轮传动的计算关系。
(一)普通圆柱蜗杆传动的主要参数及其选择普通圆柱蜗杆传动的主要参数有模数m、压力角a、蜗杆头数z1.、蜗轮齿数z2及蜗杆的直径d.等。
进行蜗杆传动的设计时,首先要正确地选择参数。
1.模数m和压力角a和齿轮传动一样,蜗杆传动的几何尺寸也以模数为主要计算参数。
蜗杆和蜗轮啮合时,在中间平面上,蜗杆的轴面模数、压力角应与蜗轮的端面模数、压力角相等,即ma1=mt2=maa1=at2ZA蜗杆的轴向压力角仅。
为标准值(200),其余三种(ZN、ZI、ZK)蜗杆的法向压力角口。
为标准值( 200),蜗杆轴向压力角与法向压力角的关系为tanαa=tanαn/cosγ式中,γ为导程角。
2.蜗杆的分度圆直径d1在蜗杆传动中,为了保证蜗杆与配对蜗轮的正确啮合,常用与蜗杆具有同样尺寸的蜗轮滚刀①来加工与其配对的蜗轮。
这样,只要有一种尺寸的蜗杆,就得有一种对应的蜗轮滚刀。
对于同一模数,可以有很多不同直径的蜗杆,因而对每一模数就要配备很多蜗轮滚刀。
显然,这样很不经济。
为了限制蜗轮滚刀的数目及便于滚刀的标准化,就对每一标准模数规定了一定数量的蜗杆分度圆直径d1而把比值称为蜗杆的直径系数。
d.与q已有标准值;常用的标准模数m和蜗杆分度圆直径d,及直径系数q见表11 -2。
如果采用非标准滚刀或飞刀切制蜗轮,d1与q值可不受标准的限制。
3.蜗杆头数z1.蜗杆头数z,可根据要求的传动比和效率来选定。
单头蜗杆传动的传动比可以较大,但效率较低,如要提高效率,应增加蜗杆的头数。
但蜗杆头数过多,又会给加工带来困难。
所以,通常蜗杆头数取为1、2、4、6 04.导程角y蜗杆的直径系数q和蜗杆头数Zl选定之后蜗杆分度圆柱上的导程角γ也就确定了。
蜗杆传动的基本参数电子教案蜗杆传动是一种常用于机械传动的传动方式,具有传动比大、传动稳定性好等优点,广泛应用于各种机械设备中。
本文针对蜗杆传动的基本参数进行详细介绍,并设计了一份电子教案,用于教学。
一、蜗杆传动的基本参数1.传动比:蜗杆传动的传动比是指蜗杆每转一圈,蜗轮转动的周长长度之比。
通常用i表示。
传动比i=(Z2+2)/(Z1×π),其中Z1为蜗杆的齿数,Z2为蜗轮的齿数。
通过调整蜗杆和蜗轮的齿数,可以达到不同的传动比来满足传动需求。
2.效率:蜗杆传动效率是指输入功与输出功的比值,通常用η表示。
蜗杆传动的效率一般较低,通常在50%左右。
主要影响因素有蜗杆蜗轮的摩擦损失、转动惯量以及蜗杆传动的摩擦力。
3.中心距:蜗杆传动的中心距是指蜗杆轴与蜗轮轴之间的距离。
中心距的选择与蜗杆的材料、蜗杆传动的传动比以及传动力的大小有关。
通常中心距越大,传动效率越高,但传动尺寸越大。
4.安全系数:蜗杆传动的安全系数是指蜗杆传动的承载能力与实际工作中所需要的扭矩之比。
安全系数越大,表示传动更安全可靠。
安全系数的选择需要结合具体传动的工作环境、载荷以及蜗杆和蜗轮的材料等因素进行综合考虑。
二、电子教案设计教学目标:掌握蜗杆传动的基本参数,了解各个参数的意义及计算方法。
教学内容:1.蜗杆传动的传动比的意义及计算方法。
2.蜗杆传动的效率的重要性及影响因素。
3.蜗杆传动的中心距的选择原则及计算方法。
4.蜗杆传动的安全系数的意义及计算方法。
教学步骤:1.导入:介绍蜗杆传动的应用范围及优点,引发学生对蜗杆传动的兴趣。
2.讲解:依次详细介绍蜗杆传动的传动比、效率、中心距和安全系数的概念、意义及计算方法。
3.实例分析:通过实例分析,让学生理解各个参数的计算方法,并讨论实际应用中可能遇到的问题和解决方法。
4.练习:提供练习题,让学生运用所学知识计算蜗杆传动的各个参数,并提供解答进行核对和讲解。
5.总结:对蜗杆传动的基本参数进行总结,强调各个参数的重要性及计算方法。
10-3圆柱蜗杆传动的基本参数和几何尺寸模数m 及压力角α 正确啮合条件:21t x P P =轴向 端面m m m t x ==21—标准值(与齿轮不同) γcos nx m m m ==基本参数蜗杆传动参数选择的优劣,直接影响到减速装置的好坏和承载能力的高低,设计中应优先选用GB 中的参数标准。
标准压力角:20=α阿基米德蜗杆、渐开线蜗杆:轴向齿形角 201==ααx 法向直廓蜗杆:法向齿形角201==ααn2021===αααt x βγ=齿轮传动 21ββ-=,蜗杆传动中两者大小相等,旋向相同。
——蜗轮的螺旋角βγ——蜗杆导程角蜗杆分度圆直径d 1πd 1p xp xγ导程 p z1111111tan d mz d m z d p z d p x z ====ππππγγtan 11z m d ⋅=加工蜗轮时的滚刀与尺寸与与之啮合的蜗杆尺寸相同,但m 一定 时,由于 z 1和 γ 的变化,d 1是变化的,即需要配备很多加工蜗轮 的滚刀。
↓刀具数量同一m 的蜗杆,应对直径d 1进行限制d 1为标准值(滚刀标准化)d 1m下表蜗杆传动的基本尺寸和参数(摘自GB/T10085-1988)蜗杆直径系数qmd q 1=d 1、m ——为标准值q 为导出值(见上表)11mz mq d ≠=m 一定时,q↑——d 1↑——蜗杆刚度↑ z 1一定时,q↑——γ↓——η↓,自锁性↑∴ 小m 蜗杆→选用大q ,保证强度和刚度→适于小P 大m 蜗杆→选用小q ,保证效率→适于大P蜗杆导程角γ12111tan d u d q z d m z ⋅===γ33~5.3=γγ↑→η↑γ↓→η↓γ↑↑→制造困难传递动力时: 头数z 1↑—γ↑—η↑∴ 采用多头蜗杆传递运动时: 保证自锁(γ≤ρ),γ↓—z 1↓,采用单头蜗杆z 1、z 2蜗杆头数z 1:蜗杆上蜗旋线的数目。
z 1=1、2、4、6等 z 1↑↑——加工困难12uz z =传递动力: 282>z (↑传动平稳性,避免根切)1002<z (z 2↑—d 2↑—蜗杆轴长↑—刚度↓)∴ 一般取z 2=32~80z 1~z 2:互质→均匀磨损i 、u1221d d n n i ≠=12z z u =蜗杆主动时:2112n n i z z u ===中心距a)(2)(2)(2121221z z mz q m d d a +≠+=+=中心距是蜗杆传动的主要参数之一,它的大小直接表明了所能传递功率的高低,所以它是动力蜗杆副的最主要参数。
圆柱蜗杆传动主要参数及几何计算设计圆柱蜗杆传动时,均取给定平面上的参数和几何尺寸作为主要参数,参考齿轮传动的计算关系进行几何计算。
1. 蜗杆传动主要参数∙普通圆柱蜗杆的基准齿廓普通圆柱蜗杆的基准齿廓是指基准蜗杆在给定截面上的规定齿廓。
在蜗杆的轴平面内基准齿廓的尺寸参数包括:∙齿顶高:Ha = m(正常齿)ha = 0.8m(短齿)∙工作齿高:h’ = 2m(正常齿)h’ = 1.6m(短齿)∙轴向齿距:Px = πm (中线上的齿厚等于齿槽宽)∙顶隙:c = 0.2m,必要时可减小到0.15m或增大到0.35m∙齿根圆角:ρf = 0.3m, 必要时可减小到0.2m或增大到0.4m∙齿形角:阿基米德蜗杆,轴向齿形角αx = 20°,法向直廓蜗杆,法向齿形角αn = 20°,渐开线蜗杆,法向齿形角αn = 20°∙模数、蜗杆分度圆直径和直径特性系数1)模数m 在中间平面上的模数为标准值,即蜗杆的轴向模数mx和蜗轮的端面模数mt为标准值。
2) 蜗杆分度圆直径d1要保证蜗杆与蜗轮的正确啮合,蜗轮加工是用和与该蜗轮相啮合的蜗杆的直径、齿形参数完全相同的滚刀进行切制。
为了减少加工蜗轮的滚刀的规格数量,利于蜗轮滚刀的标准化和系列化,国标规定d1为标准值,且与m有一定的搭配关系。
3) 蜗杆直径特性系数q由于蜗杆分度圆直径d1和蜗杆模数m均为标准值,定义它们的比值为蜗杆直径特性系数,即d1 = mq。
∙蜗杆头数Z1和蜗轮齿数Z2蜗杆头数Z1是指蜗杆圆柱面上连续齿的个数,也就是螺旋线的线数。
常用取值为1,2,4,6。
Z1过多,加工制造的难度增加,精度不易保证;Z1减小,传动效率降低,传动比较大或要求自锁时取Z1=1。
蜗轮齿数Z2根据传动比i和Z1确定。
Z2 = i Z1。
为避免蜗轮轮齿发生根切和保证传动的平稳性,一般取蜗轮齿数Z2>27;同时为避免结构尺寸一定时,模数过小而导致弯曲强度不足或模数一定时,蜗轮直径过大而导致蜗杆轴支撑跨距过大从而刚度降低,蜗轮齿数也不宜过大,一般取Z2<80。
普通圆柱蜗杆传动的基本参数及其选择1.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数ma1和压力角αa1应分别相等于蜗轮的法面模数mt2和压力角αt2,即ma1=mt2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q =d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
对于传递运动的传动,z2可达200、300,甚至可到1000。
z1和z2的推荐值见下表i=z2/z1 z1 z2≈5 6 29-317-15 4 29-6114-30 2 29-6129-82 1 29-82(4)导程角γ蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距pa与蜗杆导程pz的关系为pz=z1pa 由下图可知:tanγ= pz/πd1=z1 pa/πd1=z1m/d1=z1/q导程角γ的范围为3.5°一33°。
圆柱蜗杆传动主要参数
1、模数m
2、蜗杆分度圆直径d1 :当用滚刀切制蜗轮时,d1应采用标准值,且与m有一定的匹
配,可查表可得。
3、蜗杆导程角(螺旋角)γ:导程角γ与m及d1间有如下关系;tanγ=z1m/ d1,对于
要求有自锁性能的蜗杆传动,一般应使γ<3°30′。
4、蜗杆头数z1:对于普通圆柱蜗杆传动常取z1为1、2、4、6,对于圆弧圆柱蜗杆传
动常取z1为1、2、3、4,传动比大时及要求自锁的传动,取z1=1。
5、蜗轮齿数z2
6、中心距α和传动比i:标准蜗杆减速器的中心距α和传动比i应选用标准值,可查
表得。
7、变位系数x2:圆柱蜗杆传动变位的主要目的是配凑中心距和改变传动比,此外,通过
变位还可以提高传动的承载能力和效率,消除蜗轮根切现象。
对于普通圆柱蜗杆传动,一般x2=-1~1,常用x2=-0.7~0.7。
蜗杆图纸
蜗轮图纸。
第三节普通圆柱蜗杆传动的主要参数与几何尺寸一、普通圆柱蜗杆传动的主要参数及其选择中间平面:通过蜗杆轴线且垂直于蜗轮轴线的平面。
对于阿基米德蜗杆传动,在中间平面上,相当于齿条与齿轮的啮合传动。
在设计时常取此平面内的参数和尺寸作为计算基准。
普通圆柱蜗杆传动的主要参数1、模数m和齿形角α中间平面上:==,==模数取标准值,α=20°为标准值。
其中:mx1为蜗杆的轴向模数;mt2为蜗轮的端面模数;αx1为蜗杆的轴向压力角;αt2为蜗轮的端面压力角。
2、蜗杆分度圆直径d1和直径系数q为了减少蜗轮滚刀的数目,便于刀具的标准化,将蜗杆分度圆直径定为标准值,即对应于每一种标准模数规定一定数量的蜗杆分度圆直径,并把与的比值称为蜗杆直径系数,即式中:、、和的匹配见表。
3、蜗杆的头数z1蜗杆头数少(如:单头蜗杆)可以实现较大的传动比,但传动效率较低;蜗杆头数越多,传动率越高,但蜗杆头数过多时不易加工。
通常蜗杆头数取为1、2、4、6。
动力传动,常取z1≥2。
4、导程角γ:指蜗杆分度圆柱的导程角。
将蜗杆分度圆柱螺旋线展开成为图示的直角三角形的斜边。
图中,为导程,对于多头蜗杆,=,=π由蜗杆传动的正确啮合条件可知,当两轴线交错角为90°时,导程角γ与蜗轮分度圆柱螺旋角β相等,且方向相同。
5、传动比 i通常蜗杆传动是以蜗杆为主动件的减速装置,故其传动比为121221((d d Z Z )n )n i ≠==从动主动 6、蜗轮齿数z 2蜗轮齿数z 2= i z 1 ,z 2小,传动的平稳性差,z 2不应小于26,z 2太大时,蜗轮直径太大,蜗杆的支承间距加大,蜗杆的刚度下降。
所以,一般z 2 <100 。
表11-1 i 与z 1的荐用值表7、标准中心距设计时,一般按推荐的系列值选取a 。
当不变位时, 当变位时,)2(21)2(21'221z x q m d xm d a ++=++=,由此可求出,为了凑中心距,所需的变位系数X ,ma a Z q m a x -=+-=')(21'2 二、蜗杆传动变为的特点变位的主要目的是配凑中心距和凑传动比,使之符合标准或推荐值。
圆柱蜗杆传动主要参数及几何计算设计圆柱蜗杆传动时,均取给定平面上的参数和几何尺寸作为主要参数,参考齿轮传动的计算关系进行几何计算。
1. 蜗杆传动主要参数∙普通圆柱蜗杆的基准齿廓普通圆柱蜗杆的基准齿廓是指基准蜗杆在给定截面上的规定齿廓。
在蜗杆的轴平面内基准齿廓的尺寸参数包括:∙齿顶高:Ha = m(正常齿)ha = 0.8m(短齿)∙工作齿高:h’ = 2m(正常齿)h’ = 1.6m(短齿)∙轴向齿距:Px = πm (中线上的齿厚等于齿槽宽)∙顶隙:c = 0.2m,必要时可减小到0.15m或增大到0.35m∙齿根圆角:ρf = 0.3m, 必要时可减小到0.2m或增大到0.4m∙齿形角:阿基米德蜗杆,轴向齿形角αx = 20°,法向直廓蜗杆,法向齿形角αn = 20°,渐开线蜗杆,法向齿形角αn = 20°∙模数、蜗杆分度圆直径和直径特性系数1)模数m 在中间平面上的模数为标准值,即蜗杆的轴向模数mx和蜗轮的端面模数mt为标准值。
2) 蜗杆分度圆直径d1要保证蜗杆与蜗轮的正确啮合,蜗轮加工是用和与该蜗轮相啮合的蜗杆的直径、齿形参数完全相同的滚刀进行切制。
为了减少加工蜗轮的滚刀的规格数量,利于蜗轮滚刀的标准化和系列化,国标规定d1为标准值,且与m有一定的搭配关系。
3) 蜗杆直径特性系数q由于蜗杆分度圆直径d1和蜗杆模数m均为标准值,定义它们的比值为蜗杆直径特性系数,即d1 = mq。
∙蜗杆头数Z1和蜗轮齿数Z2蜗杆头数Z1是指蜗杆圆柱面上连续齿的个数,也就是螺旋线的线数。
常用取值为1,2,4,6。
Z1过多,加工制造的难度增加,精度不易保证;Z1减小,传动效率降低,传动比较大或要求自锁时取Z1=1。
蜗轮齿数Z2根据传动比i和Z1确定。
Z2 = i Z1。
为避免蜗轮轮齿发生根切和保证传动的平稳性,一般取蜗轮齿数Z2>27;同时为避免结构尺寸一定时,模数过小而导致弯曲强度不足或模数一定时,蜗轮直径过大而导致蜗杆轴支撑跨距过大从而刚度降低,蜗轮齿数也不宜过大,一般取Z2<80。
普通圆柱蜗杆传动的基本参数及几何尺寸计算1.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
对于传递运动的传动,z2可达200、300,甚至可到1000。
z1和z2的推荐值见下表(4)导程角γ蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距p a与蜗杆导程p z的关系为p z=z1p a,由下图可知:tanγ=p z/πd1=z1p a/πd1=z1m/d1=z1/q导程角γ的范围为3.5°一33°。
圆柱蜗轮、蜗杆设计参数选择蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。
蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。
在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。
蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头和多头之分。
若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。
计算速比(i)的公式如下:i=蜗杆转速n1蜗轮转速n2=蜗轮齿数z2蜗杆头数z11、蜗轮蜗杆主要参数与尺寸计算主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。
(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt 为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A图1图2(2)蜗杆分度圆直径d1 再制造蜗轮时,最理想的是用尺寸、形状与蜗杆完全相同的蜗轮滚刀来进行切削加工。
但由于同一模数蜗杆,其直径可以各不相同,这就要求每一种模数对应有相当数量直径不同的滚刀,才能满足蜗轮加工需求。
为了减少蜗轮滚刀数目,在规定标准模数的同时,对蜗杆分度圆直径亦实行了标准化,且与m 有一定的匹配。
蜗杆分度圆直径d1与轴向模数mx之比为一标准值,称蜗杆的直径系数。
即q=蜗杆分度圆直径模数=d1m d1=mq有关标准模数m 与标准分度圆直径d1的搭配值及对应的蜗杆直径系数参照表A (3) 蜗杆导程角r 当蜗杆的q 和z1选定后,在蜗杆圆柱上的导程角即被确定。
为导程角、导程和分度圆直径的关系。
tan r=导程分度圆周长 = 蜗杆头数x 轴向齿距分度圆周长 =z1px d1π =z1πm πm q =z1q相互啮合的蜗轮蜗杆,其导程角的大小与方向应相同。
(4) 中心距a 蜗轮与蜗杆两轴中心距a 与模数m 、蜗杆直径系数q 以及蜗轮齿数z2间的关系式如下:a=d1+d22 =m q(q+z2)蜗轮各部尺寸如表C2、 蜗轮蜗杆的画法(1) 蜗杆的规定画法 参照图1图2 (2)蜗轮的规定画法 参照图1图2 (3)蜗轮蜗杆啮合画法 参照图1图2.蜗轮蜗杆设计(2)设计原则:根据给定的中心距及传动比(或按照结构及设计的要求自定中心距和传动比)然后从蜗杆传动中心距标准值系列表中选取中心距的标准系列值,然后从经验公式先估算相关参数值,估算后在参考标准值系列表,确定标准值。