自动抓斗起重机吊具防摇摆研究与实现
- 格式:pdf
- 大小:105.44 KB
- 文档页数:2
随着大型集装箱船的持续增多,有更多的码头选择应用大型集装箱起重机,以满足更大高度的作业要求。
根据集装箱起重机作业的特征分析,随着高度的不断增加,吊具摆动的问题会更加严重。
一般吊具出现前后方向的晃动时,司机可以通过控制小车将其趋于稳定。
但是,对于顺逆时针的旋转扭动,司机无计可施。
尤其是随着自动化水平的提高,很多码头集装箱装卸均是自动化作业,对于吊具的摆动没有有效的应对方法。
为解决此问题,需要有专业的技术作为支持,通过设计改造消除吊具的摇晃与扭动,从而满足码头集装箱装卸作业要求。
1 影响集装箱起重机吊具摇动因素分析吊具摇动是集装箱起重机作业过程中的常见问题,对作业效率、安全以及操作舒适性等影响严重。
想要在规定时间内完成所有装卸任务,必须采取措施消除吊具摇动的隐患。
结合集装箱起重机结构特征分析,利用钢丝绳连接吊具与小车。
现场装卸作业时,由小车运动机构驱动小车产生动作,相应的通过钢丝绳吊具也会保持一定的加速力动作。
这种情况下虽然小车停止,但是小车会继续动作产生摇动。
以停止动作的小车为中心进行分析,将连接小车与吊具的悬垂钢丝绳看作柔性绳子,以吊具为质点,吊具的摇动可以简单看做单摆模型,因此判断无法完全避免集装箱起重机吊具的摇动。
实际装卸作业中需要由司机操作来控制吊具,尽量消除吊具摇动带来的不利影响,顺利完成集装箱的定位装卸。
在此情况下想要实现高效率作业,需要解决吊具摇晃摆动的问题。
在自动化或半自动化起重机设计中,防摇技术与防扭技术不可或缺,对实现码头集装箱装卸高效率、高安全作业具有重要作用。
2 集装箱起重机吊具常见减摇装置2.1 起升钢丝绳交叉缠绕为减轻集装箱起重机吊具的摇动问题,常见的方法是采用起升钢丝绳交叉缠绕的方式。
此种方法不在减摇装置范围内,本质在于通过增大钢丝绳与水平面的夹角来有效调节进入摇动状态下钢丝绳的张力与阻摇。
虽然此种方法有一定的减摇效果,但是有效性较差,尤其是在吊具高度与荷载状态不同的情况下,起到的减摇效果差异大。
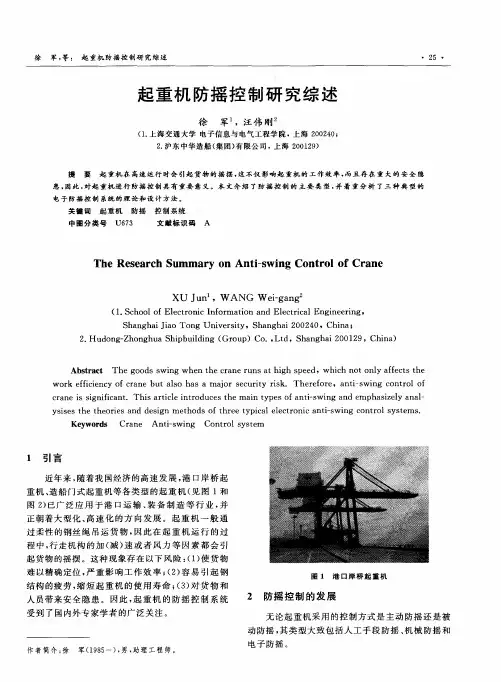
起重机防摇技术研究一、前言吊具的摇摆问题,一直是令起重行业设计和调试人员头痛的一个问题。
起重机在装卸货物时,由于其速度的变化以及外界干扰因素的影响,使吊具前后、左右的来回摆动,在影响生产效率的同时造成一定的安全隐患,最终造成严重的经济损失。
因此,研究一套起重机的吊具防摇系统,实现稳定吊具、平稳操作成为起重机制造商和研究机构一直关注的问题。
一个好的防摇系统能起良好的减摇效果,大大提高了劳动生产率。
近年来, 考虑到现代起重机增加吊重防摇控制系统的必要性,对防摇控制方法的理论研究较多,但这些理论方法只要以理论研究和仿真为主导,与实际可行的物理实现还存在一定距离,很多方面的应用还不是很理想。
二、机械式防摇技术机械式防摇技术通过在小车架下安装防摇装置,包括减摇钢丝绳、卷筒和力矩限制器传动链及带单向轴承的卷筒和制动器,通过机械手段消耗摆动的能量以实现最终消除摇摆的目的,从而提高起重机的工作效率。
要控制吊具的摇摆,首先就必须采用合理的钢丝绳缠绕方式,使车架上起升滑轮与吊具上牵引滑轮在同一平面内偏离成一定角度;利用单向轴承控制卷筒的旋转方向,通过实现放绳方向与传动轴相互锁合,保证卷筒只能向钢丝绳收绳方向旋转;在其重机作业过程中,通过对力矩限制器加以持续通电,始终给减摇钢丝绳一个张力,将其卷起,避免减摇钢丝绳的处于松散状态。
当出现吊具摇摆情况时,通过设定弹簧力来调整制动器给减摇钢丝绳的张力,从而保证在不同情况下阻止吊具的摇摆,起到减摇效果。
吊具在下降过程中,制动器打开,单向轴承的内外圈相互锁住,由于吊具重力使每个力矩限制器受到一个反向力,该力就作为减摇钢丝绳张紧力对减摇产生一定作用;当吊具上升时,减摇钢丝绳上少了吊具自重而引起的张紧力,此时减摇钢丝绳被力矩限制器带动卷筒不断卷起,一定程度上减少了吊具的摇摆;另外,单向轴承的内外相互分离,旋转力没有作用在轴上,轴处于制动状态,制动器由于被锁住而不起作用,因此制动器就会对吊具摇摆产生一定的阻尼作用;当吊具停止升降时,单向轴承的内外圈相互离合,轴处于制动状态,制动器被锁住,从而减少吊具的摇摆。
吊具天车防摇系统研究作者:李启源来源:《科学与财富》2018年第14期摘要:本文介绍了冲压车间吊具天车的防摇系统,从系统结构、数据传输及自动定位的工作原理进行了分析。
关键词:CATS控制机;PLC;角度传感器;S120变频器1.系统结构天车的电子防摇控制系统采用CATS控制机对防摇摆功能进行计算与控制,它可在复杂的工作任务下,实现短周期,高精度控制变频器的调整电机运行速度。
系统中的配有西门子DP/DP耦合器,通过耦合器与起重机电控系统的PLC进行数据信息实时交换。
防摇系统采用的红外线角度传感器对起升机构的摇晃度进行测量,同时还配有2个绝对式编码器对大/小车的位置进行测量。
并通过PROFIBUS总线将测量数据传输给CATS控制机进行处理。
CATS控制机将采集的数据通过专门函数算法进行计算,并将计算的结果转换为速度给定信号通过PROFINET实时的传送给S120变频器,S120变频器根据给定的速度信号快速对运行电机进行加减速调节,最后达到防摇摆的功能。
2.数据传输如图2所示,行车PLC借助功能块FC65生成数据存储在DB块DB100中,CATS系统通过PN/PN连接器读出该数据并进行内部处理。
相反方向上CATS系统再通过PN/PN连接器里输入信号至DB210。
PLC再次通过功能块FC66从BD210上读出数据并且接收使用此信号实现变频器的行驶。
3.自动定位CATS系统的位置数据由起重机PLC进行监控,通过这种系统数据的匹配,可以使起重机在接近任意区域限位及大车运行轨道端部时,实现先减速后停止控制,防止在高速运行情况下突然停止而产生冲击导致所吊负载的晃动。
同时自动定位模式下,可以通过采集起重机的实时运行速度以及实际位置与目标位置的距离信息,将采集到的实时速度与实时距离进行运算处理,通过运算结果来控制S120变频器在接近目标定位位置时做最合适的减速曲线,此时防摇系统所带的绝对式编码器只提供用于速度减速曲线计算的实际位置与目标位置的距离数据,定位测量还是通过激光测距仪进行定位控制。
起重机防摇技术研究
摘要:在起重机的启动和停止以及加速和减速过程中,很容易使吊具左右或前后摆动,在一定程度上影响了起重装卸效率和提高了司机的劳动强度,因此我们要通过采用先进的防摇技术,通过实现对起重机的准确定位来起重机效率。
文章主要对
plored.
Keywords:crane;anti-shaketechnology;electronicanti-sway
一、前言
吊具的摇摆问题,一直是令起重行业设计和调试人员头痛的一个问题。
起重机在装卸货物时,由于其速度的变化以及外界干扰因素的影响,使吊具前后、左右的
,考虑
,但
机械式防摇技术通过在小车架下安装防摇装置,包括减摇钢丝绳、卷筒和力矩限制器传动链及带单向轴承的卷筒和制动器,通过机械手段消耗摆动的能量以实现最终消除摇摆的目的,从而提高起重机的工作效率。
要控制吊具的摇摆,首先就必须采用合理的钢丝绳缠绕方式,使车架上起升滑轮
与吊具上牵引滑轮在同一平面内偏离成一定角度;利用单向轴承控制卷筒的旋转方向,通过实现放绳方向与传动轴相互锁合,保证卷筒只能向钢丝绳收绳方向旋转;在其重机作业过程中,通过对力矩限制器加以持续通电,始终给减摇钢丝绳一个张力,将其卷起,避免减摇钢丝绳的处于松散状态。
当出现吊具摇摆情况时,通过设定弹簧力来调整制动器给减摇钢丝绳的张力,从而保证在不同情况下阻止吊具的摇
摆。
目前大多数机械式防摇装置都是基于这个原理,但是该防摇装置非常复杂,可靠性又不高,因此维修保养的工作量较大,而且防摇效果并不是十分理想;另外还可以通过增加悬挂系统刚性抑制摇摆,此类装置同样存在维修保养工作量大和防摇效果不理想的缺点,因此机械式防摇技术还有待于改进和提高。
( 安全论文 )单位:_________________________姓名:_________________________日期:_________________________精品文档 / Word文档 / 文字可改起重机防摇技术研究(标准版)Safety is inseparable from production and efficiency. Only when safety is good can we ensure better production. Pay attention to safety at all times.起重机防摇技术研究(标准版)摘要:在起重机的启动和停止以及加速和减速过程中,很容易使吊具左右或前后摆动,在一定程度上影响了起重装卸效率和提高了司机的劳动强度,因此我们要通过采用先进的防摇技术,通过实现对起重机的准确定位来起重机效率。
文章主要对当前使用比较广泛的起重机防摇技术进行了简要的探讨。
关键词:起重机;防摇技术;电子防摇Abstract:Atthestartandstopthecranes,aswellastheprocessofac celerationanddeceleration,itiseasytomakebeforeandafterspre aderorswingaroundtoacertainextentontheimpactoftheliftingef ficiencyandimprovehandlingofthelaborintensityofthedrivers, sowewantthroughtheuseofadvancedAnti-shaketechnology,throughtheimplementationoftheaccuratepositioningofthecranetocran eefficiency.Themainarticleonthecurrentuseofabroaderanti-sw aycranetechnologybrieflyexplored.Keywords:crane;anti-shaketechnology;electronicanti-sway一、前言吊具的摇摆问题,一直是令起重行业设计和调试人员头痛的一个问题。
一、先进的设计理念:起重机载荷摇摆现象:当用起重机搬运物料时,起重机的大车,小车及提升机构的运动通常由各自的操作指令独立地控制。
当搬运物料到达目标位置时,由于受大车及小车加减速的影响,载荷会出现令人讨厌的摇摆现象。
当载荷摇摆时,卸载作业就不能进行。
出现这种情况时,只有熟练的操作工才有可能靠控制大小车的运行来消除摇摆。
但是,这需要操作工非常熟练的操作技巧和高度的专注。
消除载荷的摇摆并且精微地调整载荷到达目标位置需要很长的操作时间,这个时间大约占整个搬运工作所需时间的三分之一左右。
另外,起重机快速运行会引起载荷太大的摇摆。
过大的载荷摇摆对现场作业人员的人身安全造成威胁。
载荷摇摆也增加载荷及周围货物被损害的可能性。
载荷摇摆已成为限制起重机提高搬运物料效率的一个主要因素起重机反摇摆控制系统“内置反摇摆”:易通起重机及设计有限公司的“内置反摇摆”系统使用施耐德(Schneider Electric)的可编程控制器,内置于施耐德的Altivar71变频器中。
该反摇摆控制系统根据操作指令及起重机的实时运行状况计算出能消除摇摆的起重机大小车运行速度。
变频器根据所要求的速度通过电机驱动起重机大车和小车的运行,从而精确地消除起重机载荷摇摆现象。
施耐德可编程控制器只提供有限的计算能力和资源。
在此限制条件下,该系统避免了使用实现微积分方程以及估计预测等功能所需要的繁杂的计算程序,实现了精巧且有效的反摇摆控制算法。
由于采用速度开环方式控制,不存在速度反馈调整,该反摇摆系统起重机的大小车,在精确消除载荷摇摆的同时,一次过加速到达指定速度,或一次过减速到完全停止。
由于考虑了提升钢丝绳长度变化对载荷摇摆的影响,即使在小车,大车和提升三个方向同时运行的情况下,该系统还是能精确地消除起重机载荷的摇摆现象。
由于内置于变频器中,该系统无须其他硬件支持。
它可非常方便地安装在新的起重机上。
根据需要做很小的改动后,该系统也可方便地安装于改造中的旧起重机上。

起重机双摆振动模型与反摆控制的研究摘要起重机颇为常见,其中涉及其安全控制方式。
本文研究起重机的双摆振动模型以及反摆控制方法,讨论了理论控制方法与实际实验的应用效果,并提供了一种改进的控制算法以优化起重机性能。
关键词:起重机、双摆振动、反摆控制、控制算法引言起重机在工程中有着广泛的应用,其中涉及许多关键安全问题,例如重物悬挂时的双摆振动现象,会给操纵者和周围环境带来潜在的威胁。
因此,对于这些安全问题的控制成为了重要任务之一。
目前,对于起重机双摆振动问题,已有许多研究成果,包括理论分析以及实验控制方法等。
本文将从双摆振动模型的理论分析出发,探讨控制算法的实际应用效果。
起重机双摆振动模型起重机的双摆振动问题可以通过物理力学的方式建立模型。
一般来说,建模需考虑的因素有悬挂质量,钩绳长度,支撑杆长度以及倾斜角度等。
根据这些因素的不同组合,模型可能较为复杂,例如考虑支撑杆的弹性系数、钩绳的加速度等等。
然而,本文提出的模型只考虑最基本的参数,即悬挂质量的重力和钩绳长度之间的关系。
假设起重机悬挂质量为m,钩绳长度为l,同时将带有质量m的物体视为有两个摆,一个是普通挂钟的“小摆”,另一个是大钩绳显然下垂形成的“大摆”。
因此,起重机的双摆振动模型可以看作一个由两个简谐振动相互作用的系统。
其中,小摆与大摆的振幅相对较小,因此可以近似为振幅任意但较小的振动。
对于这样一个系统,通过物理运动基本方程的分析,可以得到类似于下列的运动学方程:(1)其中,θ1和θ2代表小摆和大摆的位置角度,g为重力加速度,l1和l2代表小摆和大摆的钩绳长度。
利用泰勒展开和简化运动学方程,可以得到非线性微分方程:(2)针对这样的非线性微分方程,理论方法通常很难求出显式的解析解。
因此,常用的方法是通过一些数值分析、仿真的方式,来研究双摆振动问题的特点和解决方法。
反摆控制对于起重机的双摆振动问题,反摆控制是一种较为有效的方法。
具体而言,反摆控制方法是利用起重机本身的动力学力学特性来消除悬挂重物带来的震荡。
专利名称:适用于抓斗起重机上的抓斗防晃方法专利类型:发明专利
发明人:朱宏敏,项建华
申请号:CN201510389623.7
申请日:20150706
公开号:CN104961051A
公开日:
20151007
专利内容由知识产权出版社提供
摘要:本发明公开了一种适用于抓斗起重机上的抓斗防晃方法,该防晃方法为:在小车起动阶段时,主动控制小车加速度进行加速,抓斗偏离量S逐渐增大,当抓斗的速度V与小车速度V相同,且抓斗偏离角θ不超过偏离角阈值θ′时,使小车转入匀速运动;小车在匀速运动过程中,抓斗偏离量S保持不超过偏离量阈值S′;在小车停车阶段时,主动控制小车加速度进行减速,抓斗偏离量S逐渐减小,当小车停止时,抓斗偏离量S小于抓斗与池壁之间的安全距离。
本发明的优点是,抓斗的大质量,长摆动周期,在反馈防晃中均为不利因素,而在主动防晃中,大质量、长摆动周期却减小了计算、干扰和其他因素引起的误差,使防晃得以较好的实现且保证了工作效率。
申请人:上海昂丰矿机科技有限公司
地址:201802 上海市嘉定区南翔镇翔江路988号
国籍:CN
代理机构:上海申蒙商标专利代理有限公司
代理人:徐小蓉
更多信息请下载全文后查看。
几种防摇摆装置在起重机上的应用-机械制造论文几种防摇摆装置在起重机上的应用几种防摇摆装置在起重机上的应用牛训华(河南省矿山起重机有限公司,河南长垣 453400)[摘要]阐述起重机常用的几种防摇摆特性,提出了电气式防摇摆和机械式防摇摆中的倒八字防摇摆为较佳方案,具有一定的推广价值。
[ 关键词]起重机;防摇摆装置;应用起重机在正常工作时,大、小车运行的起、制动所产生的加、减速导致挠性悬挂的载荷产生一定的摆动,这种摆动直接影响到起重机使用的生产效率,对于频繁作业的起重机而言,降低载荷的摆动时间,提高工作效率刻不容缓。
另外,载荷的摆动还会对工作人员、设备和起重机本身造成极大的安全隐患,因此,研究一套起重机的防摇摆系统,实现平稳作业、已成为起重机研究机构关注的热点问题之一。
一个好的防摇摆系统能起良好的减摇效果,可以提高生产效率,减小生产过程中的安全隐患。
起重机常用的防摇摆方式主要有手动式、机械式、电气式。
1手动式防摇摆利用司机熟练的操作,当载荷到达目的地时,司机采用打反车的方式,让小车反方向运行,这样能消弱摆动量,使载荷较快地停下来,但是这种方式对桥架、传动部分冲击大,也容易损坏电气元件,降低使用寿命。
操作人员频繁的操作,容易疲劳,安全隐患也比较大。
2机械式防摇摆2.1交叉钢丝绳防摇摆沿小车运行方向在小车架上装设两组交叉悬挂的减摇钢丝绳及驱动装置,来驱动液压泵,依据液压回路中安全阀的作用,使钢丝绳产生张力,从而控制载荷的摆动。
这种方式不影响起升钢丝绳的使用寿命,如果该装置出现问题,也不会影响整机的安全性,只是在起吊载荷与空载使用时,效果差异比较大。
2.2分离小车式防摇摆分离小车式防摇摆的工作原理是当小车行走时,前后两组小车通过驱动机构向两侧分离,使起升机构的钢丝绳呈“V”型,这样能够有效控制载荷的摆动。
当小车停止运行作起升或下降动作时,两组小车自行靠拢。
这种装置使小车自重增加,结构形式也比较复杂。
2.3跷板梁式防摇摆跷板梁式防摇摆装置是由跷板梁和安装在起重机上面的液力缓冲缸组成,当小车起动或是加速时,由于惯性的作用,载荷将向小车运行的反向摆动,从而使跷板梁也跟着倾斜,跷板梁的倾斜能量将由液力缓冲缸吸收,由于载荷向后方向的摆动受阻,于是载荷将向反方向摆动,此时,跷板梁也跟着向相反的方向倾斜,如此反复由液力缓冲缸吸收能量,从而有效控制载荷的摆动。