Opengl实验报告及源代码实验三 着色器编程
- 格式:doc
- 大小:48.50 KB
- 文档页数:5
LearnOpenGL学习笔记(四)——着⾊器类编写之前我们将着⾊器的代码⽤glsl写好之后,保存为字符串指针,然后⽤⼀个函数去编译它,这是⼀种⼿段,对于简单的着⾊器代码可以这样。
但当我们针对复杂的着⾊器,我们发现编写、编译、管理着⾊器是⼀件⿇烦事。
我们⽤⼀个类将着⾊器的所有编译,链接,管理都放在⼀个⽂件⾥。
再将着⾊器源码单独设置成.glsl⽂件⽤来,从⽂件流读取,不再放到c++编译器⾥了。
这样主函数就⽐较简洁了。
我们建⽴⼀个类shader,将⼀切着⾊器的步骤都在这个类⾥封装了,这样我们在主函数实例化它,我们就直接可以使⽤着⾊器不⽤在意内部的具体情况(从⽂件流读取,编译,链接)。
因为我们是在.h⽂件⾥⾯实现的这些步骤,包括函数的具体实现我们都放到.h⽂件⾥了,所以我们还需要⼀些特殊处理#ifndef SHADER_H //先测试x是否被宏定义过#define SHADER_H //如果没有宏定义下⾯就宏定义x并编译下⾯的语句#include <glad/glad.h>; // 包含glad来获取所有的必须OpenGL头⽂件#include <string>#include <fstream> //file stream ,fstream是C++ STL中对⽂件操作的合集,包含了常⽤的所有⽂件操作。
#include <sstream> //字符串流,可以⽀持C风格的串流的输⼊输出操作。
#include <iostream>#endif //如果已经定义了则编译#endif后⾯的语句然后我们可以声明这个类的结构了:class Shader {public:// 程序IDunsigned int ID;// 构造器读取并构建着⾊器Shader(const GLchar* vertexPath, const GLchar* fragmentPath);// 使⽤/激活程序void use();// uniform⼯具函数void setBool(const std::string &name, bool value) const;void setInt(const std::string &name, int value) const;void setFloat(const std::string &name, float value) const;};看着⽐较简单,接下来我们对函数的具体实现,分析,⾸先是最重要的构造函数,这⼀个函数⾥⾯,将⼀切编译链接都做完了。
opengl实验报告OpenGL实验报告引言:OpenGL(Open Graphics Library)是一种跨平台的图形编程接口,被广泛应用于计算机图形学、游戏开发和科学可视化等领域。
本实验报告将介绍我对OpenGL的实验研究和学习成果。
一、实验目的本次实验的主要目的是掌握OpenGL的基本概念和使用方法,了解图形渲染的原理和过程,以及学习如何在OpenGL中创建和操作图形对象。
二、实验环境本次实验使用的是OpenGL的最新版本,并在Windows操作系统下进行开发。
使用的开发工具是Visual Studio和OpenGL的开发库。
三、实验过程1. 熟悉OpenGL的基本概念在开始实验之前,我先学习了OpenGL的基本概念,包括OpenGL的坐标系统、图形渲染管线、着色器等。
了解这些概念对于后续的实验非常重要。
2. 创建窗口和上下文在OpenGL中,我们需要先创建一个窗口和一个OpenGL上下文,以便进行图形渲染。
通过调用相关的OpenGL函数,我成功创建了一个窗口,并初始化了OpenGL的上下文。
3. 绘制基本图形接下来,我开始尝试绘制一些基本的图形,比如点、线和三角形。
通过设置顶点坐标和颜色,我成功绘制出了这些基本图形,并在窗口中显示出来。
4. 添加纹理为了使图形更加逼真和丰富,我学习了如何在OpenGL中添加纹理。
通过加载图片并设置纹理坐标,我成功将纹理贴在了绘制的图形上,使其具有了更加真实的效果。
5. 光照和阴影效果为了增加图形的立体感和真实感,我学习了如何在OpenGL中添加光照和阴影效果。
通过设置光源的位置和属性,以及材质的属性,我成功实现了光照和阴影的效果,使图形看起来更加逼真。
6. 动画效果为了使图形具有动态效果,我学习了如何在OpenGL中实现简单的动画效果。
通过每帧更新顶点的位置和纹理坐标,我成功实现了图形的旋转和平移动画,使其具有了动态的效果。
四、实验结果和分析通过以上的实验过程,我成功掌握了OpenGL的基本概念和使用方法,并实现了一些基本的图形渲染效果。
实验1,opengl的基本语法实验报告心得体会实验1,opengl的基本语法实验报告心得体会篇一:图形学实验报告openGL的基本语法《计算机图形学基础》实验1 OpenGL的基本语法一、实验目的及要求1. 了解OpenGL的主要功能2. 了解OpenGL的绘制流程3. 掌握OpenGL的基本语法4. 通过以上内容,掌握 OpenGL的编程框架,实现简单的图形绘制二、实验环境主要是软件开发环境:VC三、实验内容OpenGL绘制矩形的简单例子。
四、实验结果五、程序代码#includevoid Initial(void){}void Display(void){glClear(GL_COLOR_BUFFER_BIT); //用当前背景色填充窗口glColor3f(, , );//设置当前的绘图颜色为红色glRectf(, , , ); //绘制一个矩形glFlush();//处理所有的OpenGL程序}int main(int argc, char* argv[]){glutInit(&argc, argv); glutInitDisplayMo(转载于: 小龙文档网:实验1,opengl的基本语法实验报告心得体会)de(GLUT_SINGLE | GLUT_RGB); //初始化glClearColor(, , , ); //设置窗口背景颜色为白色glMatrixMode(GL_PROJECTION);//设置投影参数gluOrtho2D(,,,); 窗口的显示模式glutInitWindowSize(400,300); //设置窗口的尺寸glutInitWindowPosition(100,120); //设置窗口的位置}glutCreateWindow("矩形"); //创建一个名为矩形的窗口glutDisplayFunc(Display); //设置当前窗口的显示回调函数Initial(); //完成窗口初始化glutMainLoop(); //启动主GLUT事件处理循环return 0;六、心得体会。
学生实验实习报告册学年学期:2016-2017学年 春□√秋学期课程名称:大学计算机基础学生学院:通信与信息工程学院专业班级:学生学号:学生姓名:联系电话:重庆邮电大学教务处印制实验实习名OpenGL基本使用指导教师秦红星考核成绩课程名称计算机图形学A 课程编号实验实习地点信息科技大厦S306 完成日期学生姓名学生学号学院专业广电与数字媒体类所在班级教师评语教师签名:年月日一、实验实习目的及要求目的:认识了解OpenGL的性质、功能要求:1.利用OpenGL绘制一个简单的场景:比如球体、正方体2.加入灯光3.实现交互操作:平移、缩放、旋转二、实验实习设备(环境)及要求(软硬件条件)采用Microsoft Visual C 2010生成环境并用C++编写程序三、实验实习内容与步骤内容:背景为黑色,在点光源下,能够实现平移、缩放、旋转的球。
步骤:建立立体-->添加光照-->添加变换1.先写“主函数”,在主函数中将窗口生成好。
2.在“自定义函数1”中对窗口进行清除、填色等操作。
3.在“自定义函数1”中设置点光源,设置光照的各种参数。
4.在“自定义函数1”中设置平移、缩放、旋转及各参数。
5.在“自定义函数2”中设置平移和缩放的循环。
6.在主函数中调用这两个自定义函数,并且在主函数里面用“自定义函数1”为参数调用glutDisplayFunc()来注册一个绘图函数。
其次用空闲回调函数glutIdleFunc()来使球体不停地循环有缩放、平移功能的函数。
实现动画。
四、实验实习过程或算法(源程序、代码)#include<GL/glut.h>GLfloat angle = 0.0f;GLfloat multiply = 0.0f;void display(void){glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);glClearColor(0.0f, 0.0f, 0.0f, 0.0f); //设置窗口里面的背景颜色glMatrixMode(GL_PROJECTION);glLoadIdentity();gluPerspective(90.0f, 1.0f, 1.0f, 20.0f);glLoadIdentity();gluLookAt(0.5, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0);{//设置一个点光源GLfloat light_position[] = { 0.5f,0.0f,0.0f,1.0f };//(xyzw)w为1时代表点光源,0时代表方向光源GLfloat light_ambient[] = { 0.5f,0.5f,0.5f,1.0f };//(0001)GLfloat light_diffuse[] = { 1.0f,1.0f,1.0f,1.0f };//(1111)GLfloat light_specular[] = { 1.0f, 1.0f, 1.0f, 1.0f };//(1111)glLightfv(GL_LIGHT0, GL_POSITION, light_position);glLightfv(GL_LIGHT0, GL_AMBIENT, light_ambient);//光源环境光强值glLightfv(GL_LIGHT0, GL_DIFFUSE, light_diffuse);//光源漫反射强值glLightfv(GL_LIGHT0, GL_SPECULAR, light_specular);//光源镜面反射强值glEnable(GL_LIGHT0);//打开该光源glEnable(GL_LIGHTING);//打开光照}{glRotatef(angle, 0.0f, 1.0f, 0.0f);glTranslatef(0.0f, 0.0f, 0.6f); //平移glScaled(multiply, multiply, multiply); //缩放glutSolidSphere(0.2, 50, 50);}glutSwapBuffers();}void rotateAndzoom(void) //旋转和缩放{angle += 1.0f;if (angle >= 360.0f)angle = 0.0f;display();//设置旋转multiply += 0.01f;if (multiply >= 2.0f)// multiply -= 0.01f;//if (multiply <= 1.0f)multiply = 1.0f;display();//设置缩放}int main(int argc, char* argv[]){glutInit(&argc, argv);glutInitDisplayMode(GLUT_RGBA | GLUT_DOUBLE);glutInitWindowPosition(400, 50);glutInitWindowSize(800, 800);glutCreateWindow("立体");glutDisplayFunc(&display);glutIdleFunc(&rotateAndzoom);//旋转glutMainLoop();//调用该函数启动程序,所有以创建的窗口将会显示return 0;}五、实验实习结果分析和(或)源程序调试过程实验实习名直线扫面和区域填充实现指导教师考核成绩课程名称课程编号实验实习地点完成日期学生姓名学生学号学院专业通信与信息工程学院广电与数字媒体类所在班级教师评语教师签名:年月日一、实验实习目的及要求项目目的:熟悉光栅图形学中的相关算法项目要求:1.应用OpenGL点绘制函数直线与区域2.采用直线扫面算法绘制一条线段,直线有离散点组成3.利用区域填充算法绘制多边形区域,区域由离散点组成二、实验实习设备(环境)及要求(软硬件条件)采用Microsoft Visual C 2010生成环境并用C++编写程序三、实验实习内容与步骤内容:1.用DDA算法实现点绘制直线。
《OpenGL编程精粹》实验报告班级:计科083姓名:许银学号:0804641004指导教师:陈永强2011 年6 月 4 日一、实验目的通过本实验,使自己了解OpenGL的有关原理、算法及系统,掌握基本图形学显示程序设计方法,及三维图形程序设计方法,还要学习OpenGL光源、光照模型、物体材质、明暗处理、深度测试等生成真实世界的基本方法,为进一步学习计算机辅助设计方面的设计知识打下基础,同时通过此课程设计提高动手实践能力和学习分析能力。
二、实验要求这次课程设计的要求是通过OpenGL编程,模拟太阳、地球、月亮三者之间公转与自转的运动关系。
三、开发环境基于OpenGL的Microsoft Visual C++ 6.0四、实验内容//外部变量定义static GLfloat a = 3.5;static GLfloat b = 2;static GLfloat x = 0.0;static GLfloat y = 2.0;static GLfloat spin = 0.0;static GLfloat right = 0.0;static GLfloat left = 0.0;static GLfloat up = 0.0;static GLfloat down = 0.0;static sun_rotate = 0.0;static m = 0.0;static n = 0.0;static m_spin = 0.0;static m_x = 1.0;static m_y = 0.0;void sunfunc(void){sun_rotate+=2.0;if(sun_rotate>360.0)sun_rotate-=360.0;glutPostRedisplay();}{right+=2.0;if(right>360)right-=360;glutPostRedisplay(); }void leftfunc(void) {left+=2.0;if(left>360)left-=360;glutPostRedisplay(); }void upfunc(void) {up+=2.0;if(up>360.0)up-=360.0;glutPostRedisplay(); }void downfunc(void) {down+=2.0;if(down>360.0)down-=360.0;glutPostRedisplay(); }void spinfunc(void) {spin+=0.006;if(spin>360)spin-=360.0;x=a*sin(spin);y=b*cos(spin);glutPostRedisplay(); }{m_spin+=2;if(m_spin>360.0)m_spin-=360;m_x=sin(m_spin);m_y=cos(m_spin);glutPostRedisplay();}//初始化void init(void){//设置背景色glClearColor(0.0, 0.0, 0.0, 0.0);//设置平滑着色glShadeModel(GL_SMOOTH);//启用深度测试消隐glEnable(GL_DEPTH_TEST);//全局环境光GLfloat model_ambient[]={0.1,0.1,0.1,1.0};//光源位置GLfloat light_position[]={1.0, 1.0, 1.0, 0.0};//光的环境强度 GLfloat light_ambient[]={1.0, 1.0, 1.0, 1.0};//光的散射强度GLfloat light_diffuse[]={1.0, 1.0, 1.0, 1.0};//光的镜面强度GLfloat light_specular[]={1.0, 1.0, 1.0, 1.0};//设置背景色glClearColor(0.0, 0.0, 0.0, 0.0);//设置平滑着色glShadeModel(GL_SMOOTH);//启用深度测试消隐glEnable(GL_DEPTH_TEST);glLightfv(GL_LIGHT0,GL_POSITION,light_position);glLightfv(GL_LIGHT0,GL_AMBIENT,light_ambient);glLightfv(GL_LIGHT0,GL_DIFFUSE,light_diffuse);//光照模型glLightModelfv(GL_LIGHT_MODEL_AMBIENT,model_ambient);//启用光照 glEnable(GL_LIGHTING);glEnable(GL_LIGHT0);//启用混合glEnable(GL_BLEND);//启用抗锯齿glEnable(GL_POINT_SMOOTH);glEnable(GL_LINE_SMOOTH);glEnable(GL_POLYGON_SMOOTH);//启用雾// glEnable(GL_FOG);}//回调void display(void){//地球材质属性GLfloat mat_ambient[] = { 0.2, 0.2, 0.9, 1.0 };GLfloat mat_diffuse[] = { 0.2, 0.2, 0.9, 1.0 };GLfloat mat_specular[] = { 0.2, 0.1, 0.8, 1.0 };GLfloat mat_shininess[] = { 10.0 };GLfloat mat_emission[] = {0.1, 0.1, 0.1, 0.0};//太阳材质属性GLfloat sun_ambient[] = { 0.9, 0.2, 0.1, 1.0 };GLfloat sun_diffuse[] = { 0.9, 0.2, 0.2, 1.0 };GLfloat sun_specular[] = { 0.9, 0.3, 0.1, 1.0 };GLfloat sun_shininess[] = { 20.0 };GLfloat sun_emission[] = {0.1, 0.1, 0.1, 0.0};//月球材质属性GLfloat mom_ambient[] = { 0.5, 0.5, 0.5, 1.0 };GLfloat mom_diffuse[] = { 0.5, 0.5, 0.5, 1.0 };GLfloat mom_specular[] = { 0.5, 0.5, 0.5, 1.0 };GLfloat mom_shininess[] = { 50.0 };GLfloat mom_emission[] = {0.1, 0.1, 0.1, 0.0};glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);glColor4f(1.0,1.0,1.0,0.0);glPushMatrix();glPushMatrix();glEnable(GL_LIGHTING);//设置太阳材质属性glMaterialfv(GL_FRONT, GL_AMBIENT, sun_ambient);glMaterialfv(GL_FRONT, GL_DIFFUSE, sun_diffuse);glMaterialfv(GL_FRONT, GL_SPECULAR, sun_specular); glMaterialfv(GL_FRONT, GL_SHININESS, sun_shininess); glMaterialfv(GL_FRONT, GL_EMISSION, sun_emission); //太阳自传sunfunc();glRotatef(sun_rotate,1.0,1.0,0.0);glutSolidSphere(0.8,100,100);glPopMatrix();//轨道旋转glRotatef(right, 0.0, 1.0, 0.0);glRotatef(-left, 0.0, 1.0, 0.0);glRotatef(-up, 1.0, 0.0, 0.0);glRotatef(down, 1.0, 0.0, 0.0);glPushMatrix();glTranslatef(x,y,0);glEnable(GL_LIGHTING);//地球材质设置glMaterialfv(GL_FRONT, GL_AMBIENT, mat_ambient);glMaterialfv(GL_FRONT, GL_DIFFUSE, mat_diffuse);glMaterialfv(GL_FRONT, GL_SPECULAR, mat_specular);glMaterialfv(GL_FRONT, GL_SHININESS, mat_shininess); glMaterialfv(GL_FRONT, GL_EMISSION, mat_emission);glutSolidSphere(0.3, 100, 100);glDisable(GL_LIGHTING);glutSolidTorus(0.004,0.56,100,100);glPushMatrix();{glRotatef(-m_spin,0,0,1);glTranslatef(0.4,0.4,0);m_spinfunc();glEnable(GL_LIGHTING);//月球材质设定glMaterialfv(GL_FRONT, GL_AMBIENT, mom_ambient);glMaterialfv(GL_FRONT, GL_DIFFUSE, mom_diffuse);glMaterialfv(GL_FRONT, GL_SPECULAR, mom_specular); glMaterialfv(GL_FRONT, GL_SHININESS, mom_shininess); glMaterialfv(GL_FRONT, GL_EMISSION, mom_emission); glutSolidSphere(0.14,100,100);}glPopMatrix();glPopMatrix();glPushMatrix();//绘制轨道禁用光照glDisable(GL_LIGHTING);glScalef(a/b,1.0,1.0);glutSolidTorus(0.003,2.0,100,100);glPopMatrix();glPopMatrix();glutSwapBuffers();}//窗口变化函数void reshape(int w,int h){//视口变换glViewport( 0, 0, (GLsizei)w,(GLsizei)h);//选择投影矩阵glMatrixMode(GL_PROJECTION);//重置投影矩阵glLoadIdentity();//正投影if(w>=h)glOrtho(-3.0*(GLfloat)w/(GLfloat)h, 3.0*(GLfloat)w/(GLfloat)h, -3.0, 3.0, -10.0, 10.0);elseglOrtho(-3.0, 3.0, -3.0*(GLfloat)w/(GLfloat)h,3.0*(GLfloat)w/(GLfloat)h, -10.0, 10.0);//透视投影// gluPerspective(45.0, (GLfloat)w/(GLfloat)h, 1.0, 100.0);//选择模型视图矩阵glMatrixMode(GL_MODELVIEW);//重置模型视图矩阵glLoadIdentity();//下面可以设置观察点 glLookAt() 或是变换场景局部坐标系glTranslate() glRotate() glScale()// gluLookAt(0.0, 0.0, 5.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0);}//鼠标响应void mouse(int button, int state, int x, int y){switch(button){case GLUT_LEFT_BUTTON:if(state==GLUT_DOWN)glutIdleFunc(spinfunc);break;case GLUT_RIGHT_BUTTON:if(state==GLUT_DOWN)glutIdleFunc(m_spinfunc);break;case GLUT_MIDDLE_BUTTON:if(state==GLUT_DOWN)break;}}//主函数int main(int argc,char **argv){glutInit(&argc,argv);glutInitDisplayMode(GLUT_DOUBLE | GLUT_RGB | GLUT_DEPTH);glutInitWindowSize(850,600);glutInitWindowPosition(100,100);glutCreateWindow(argv[0]);init();glutReshapeFunc(reshape);glutMouseFunc(mouse);glutKeyboardFunc(keyboard);glutDisplayFunc(display);glutMainLoop();return 0;}实验结果如下:五、实验总结及心得体会通过这次实验,使我学习了更多的基于OpenGL的编程方法,在实验过程中多多少少出现过各式各样的问题,我也不断在学习解决这些问题,编程就是要将理论付诸于实践,二者相辅相成,所以要多多练习OpenGL的编程,提高自己的编程能力,同时不断地掌握新的理论知识。
基于OpenGL的3D游戏引擎开发与着色器优化近年来,随着计算机图形学和游戏行业的快速发展,基于OpenGL 的3D游戏引擎开发成为了热门话题。
在这个领域,着色器优化是一个至关重要的环节,它直接影响着游戏画面的质量和性能。
本文将深入探讨基于OpenGL的3D游戏引擎开发过程中的关键技术和着色器优化方法。
1. OpenGL简介OpenGL(Open Graphics Library)是一种跨平台的图形编程接口,广泛应用于计算机图形学、虚拟现实、模拟等领域。
作为一种开放标准,OpenGL提供了丰富的函数库,可以方便地进行2D和3D图形渲染。
2. 3D游戏引擎开发流程2.1 游戏引擎架构设计在进行3D游戏引擎开发之前,首先需要设计游戏引擎的架构。
一个良好的架构设计可以提高开发效率和代码可维护性。
常见的游戏引擎架构包括组件实体系统(Entity-Component-System,ECS)、MVC (Model-View-Controller)等。
2.2 场景管理与资源加载场景管理是游戏引擎中非常重要的一部分,它涉及到场景的创建、销毁、切换等操作。
同时,资源加载也是游戏引擎中必不可少的环节,包括模型、纹理、音频等资源的加载和管理。
2.3 物理引擎集成物理引擎可以模拟真实世界中的物理规律,为游戏增加真实感和趣味性。
在3D游戏引擎开发中,集成物理引擎是一个常见的需求,例如Bullet、PhysX等。
2.4 用户交互与输入处理用户交互是游戏引擎中至关重要的一环,包括鼠标、键盘、手柄等输入设备的处理。
良好的用户交互设计可以提升游戏体验。
3. 着色器优化技术3.1 顶点着色器优化顶点着色器是OpenGL中一个非常重要的阶段,它负责对顶点进行变换和投影操作。
在进行顶点着色器优化时,可以考虑减少不必要的计算、合并顶点数据等方式来提高性能。
3.2 片元着色器优化片元着色器是决定最终像素颜色的关键环节,在进行片元着色器优化时,可以考虑减少纹理采样次数、使用延迟渲染等技术来提高渲染效率。
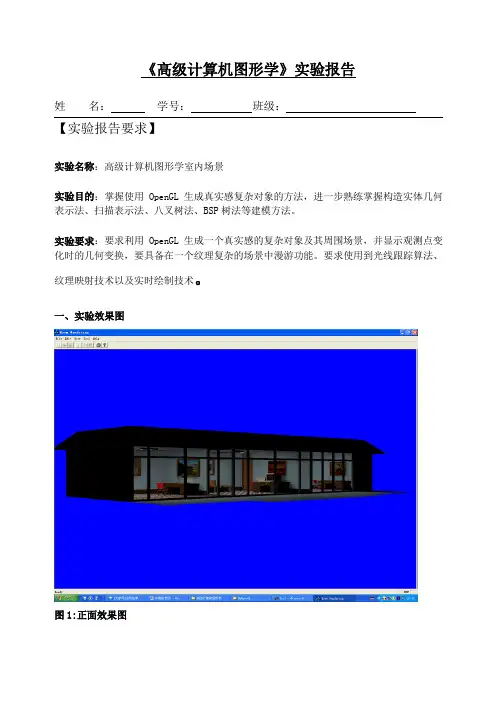
《高级计算机图形学》实验报告姓名:学号:班级:【实验报告要求】实验名称:高级计算机图形学室内场景实验目的:掌握使用OpenGL生成真实感复杂对象的方法,进一步熟练掌握构造实体几何表示法、扫描表示法、八叉树法、BSP树法等建模方法。
实验要求:要求利用OpenGL生成一个真实感的复杂对象及其周围场景,并显示观测点变化时的几何变换,要具备在一个纹理复杂的场景中漫游功能。
要求使用到光线跟踪算法、纹理映射技术以及实时绘制技术。
一、实验效果图图1:正面效果图图2:背面效果图图4:背面效果图图4:室内场景细节效果图图5:场景角度转换效果图二、源文件数据代码:共6个文件,其实现代码如下:1、DlgAbout.cpp#include "StdAfx.h"#include "DlgAbout.h"CAboutDlg::CAboutDlg() : CDialog(CAboutDlg::IDD) {}void CAboutDlg::DoDataExchange(CDataExchange* pDX) {CDialog::DoDataExchange(pDX);}BEGIN_MESSAGE_MAP(CAboutDlg, CDialog)END_MESSAGE_MAP()2、FormCommandView.cpp#include "stdafx.h"#include "Tool.h"#include "MainFrm.h"#include "FormCommandView.h"#include "ToolDoc.h"#include "RenderView.h"// Download by #ifdef _DEBUG#define new DEBUG_NEW#undef THIS_FILEstatic char THIS_FILE[] = __FILE__;#endif// CFormCommandViewIMPLEMENT_DYNCREATE(CFormCommandView, CFormView)CFormCommandView::CFormCommandView(): CFormView(CFormCommandView::IDD){//{{AFX_DATA_INIT(CFormCommandView)m_Smooth = FALSE;m_Antialias = FALSE;//}}AFX_DATA_INIT}CFormCommandView::~CFormCommandView(){}void CFormCommandView::DoDataExchange(CDataExchange* pDX){CFormView::DoDataExchange(pDX);//{{AFX_DATA_MAP(CFormCommandView)DDX_Control(pDX, IDC_FRAME_COLOR_BACK, m_ControlBackColor);DDX_Check(pDX, IDC_CHECK_SMOOTH, m_Smooth);DDX_Check(pDX, IDC_CHECK_ANTIALIAS, m_Antialias);//}}AFX_DATA_MAP}BEGIN_MESSAGE_MAP(CFormCommandView, CFormView)//{{AFX_MSG_MAP(CFormCommandView)ON_WM_PAINT()ON_WM_LBUTTONUP()ON_BN_CLICKED(IDC_RADIO_MODEL_1, OnRadioModel1)ON_BN_CLICKED(IDC_RADIO_MODEL_2, OnRadioModel2)ON_BN_CLICKED(IDC_CHECK_SMOOTH, OnCheckSmooth)ON_BN_CLICKED(IDC_CHECK_ANTIALIAS, OnCheckAntialias)//}}AFX_MSG_MAPEND_MESSAGE_MAP()///////////////////////////////////////////////////////////////////////// ////// CFormCommandView diagnostics#ifdef _DEBUGvoid CFormCommandView::AssertValid() const{CFormView::AssertValid();}void CFormCommandView::Dump(CDumpContext& dc) const{CFormView::Dump(dc);}CToolDoc* CFormCommandView::GetDocument() // non-debug version is inline {ASSERT(m_pDocument->IsKindOf(RUNTIME_CLASS(CToolDoc)));return (CToolDoc*)m_pDocument;}#endif //_DEBUG// OnPaintvoid CFormCommandView::OnPaint(){// Device context for paintingCPaintDC dc(this);// Options are stored in ApplicationCToolApp *pApp = (CToolApp *)AfxGetApp();CRect rect;// Color backm_ControlBackColor.GetWindowRect(&rect);ScreenToClient(&rect);CBrush BrushBack(pApp->m_OptionColorGlBack);dc.FillRect(&rect,&BrushBack);}// OnLButtonUpvoid CFormCommandView::OnLButtonUp(UINT nFlags,CPoint point){CRect rect;CToolApp *pApp = (CToolApp *)AfxGetApp();// Option back colorm_ControlBackColor.GetWindowRect(&rect);ScreenToClient(&rect);if(rect.PtInRect(point)){CColorDialog dlg(pApp->m_OptionColorGlBack);if(dlg.DoModal()==IDOK){pApp->m_OptionColorGlBack = dlg.GetColor();CRenderView *pView = (CRenderView *)GetRenderView();pView->m_ClearColorRed = (float)GetRValue(pApp->m_OptionColorGlBack) / 255.0f;pView->m_ClearColorGreen = (float)GetGValue(pApp->m_OptionColorGlBack) / 255.0f;pView->m_ClearColorBlue = (float)GetBValue(pApp->m_OptionColorGlBack) / 255.0f;this->InvalidateRect(&rect,FALSE);pView->InvalidateRect(NULL,FALSE);}}CFormView::OnLButtonUp(nFlags, point);}// GetRenderViewCView *CFormCommandView::GetRenderView(){CToolApp *pApp = (CToolApp *)AfxGetApp();CMainFrame *pFrame = (CMainFrame *)pApp->m_pMainWnd;CView *pView = (CView *)pFrame->m_wndSplitter.GetPane(0,1);return pView;}// Modelvoid CFormCommandView::OnRadioModel1(){glPolygonMode(GL_FRONT_AND_BACK,GL_LINE);this->GetRenderView()->InvalidateRect(NULL,FALSE);}void CFormCommandView::OnRadioModel2(){glPolygonMode(GL_FRONT_AND_BACK,GL_FILL);this->GetRenderView()->InvalidateRect(NULL,FALSE); }// OnCheckSmoothvoid CFormCommandView::OnCheckSmooth(){m_Smooth = !m_Smooth;if(m_Smooth)glShadeModel(GL_SMOOTH);elseglShadeModel(GL_FLAT);this->GetRenderView()->InvalidateRect(NULL,FALSE);}// OnCheckAntialias// Toggle antialiased linesvoid CFormCommandView::OnCheckAntialias(){m_Antialias = !m_Antialias;if(m_Antialias){glEnable(GL_LINE_SMOOTH);glEnable(GL_BLEND);glBlendFunc(GL_SRC_ALPHA,GL_ONE_MINUS_SRC_ALPHA);glHint(GL_LINE_SMOOTH_HINT,GL_NICEST);glLineWidth(1.5f);}else{glDisable(GL_LINE_SMOOTH);glDisable(GL_BLEND);glBlendFunc(GL_SRC_ALPHA,GL_ONE_MINUS_SRC_ALPHA);glHint(GL_LINE_SMOOTH_HINT,GL_NICEST);glLineWidth(1.0f);}GetRenderView()->InvalidateRect(NULL,FALSE);}3、MainFrm.cpp#include "stdafx.h"#include "Tool.h"// Download by #include "MainFrm.h"#include "FormCommandView.h"#include "RenderView.h"#ifdef _DEBUG#define new DEBUG_NEW#undef THIS_FILEstatic char THIS_FILE[] = __FILE__;#endif// CMainFrameIMPLEMENT_DYNAMIC(CMainFrame, CFrameWnd)BEGIN_MESSAGE_MAP(CMainFrame, CFrameWnd)//{{AFX_MSG_MAP(CMainFrame)ON_WM_CREATE()ON_WM_PAINT()//}}AFX_MSG_MAPEND_MESSAGE_MAP()static UINT indicators[] ={ID_SEPARATOR, // status line indicator ID_INDICATOR_CAPS,ID_INDICATOR_NUM,ID_INDICATOR_SCRL,};// CMainFrame construction/destruction CMainFrame::CMainFrame(){}CMainFrame::~CMainFrame(){}int CMainFrame::OnCreate(LPCREATESTRUCT lpCreateStruct) {if (CFrameWnd::OnCreate(lpCreateStruct) == -1)return -1;if (!m_wndToolBar.Create(this) ||!m_wndToolBar.LoadToolBar(IDR_MAINFRAME)) {TRACE0("Failed to create toolbar\n");return -1; // fail to create}if (!m_wndStatusBar.Create(this) ||!m_wndStatusBar.SetIndicators(indicators,sizeof(indicators)/sizeof(UINT))){TRACE0("Failed to create status bar\n");return -1; // fail to create}m_wndToolBar.SetBarStyle(m_wndToolBar.GetBarStyle() | CBRS_TOOLTIPS | CBRS_FLYBY | CBRS_SIZE_DYNAMIC);return 0;}BOOL CMainFrame::PreCreateWindow(CREATESTRUCT& cs){cs.cx = 600; cs.cy = 500;return CFrameWnd::PreCreateWindow(cs);}// CMainFrame diagnostics#ifdef _DEBUGvoid CMainFrame::AssertValid() const{CFrameWnd::AssertValid();}void CMainFrame::Dump(CDumpContext& dc) const{CFrameWnd::Dump(dc);}#endif //_DEBUG// CMainFrame message handlersvoid CMainFrame::OnPaint(){CPaintDC dc(this); // device context for painting}BOOL CMainFrame::OnCreateClient(LPCREATESTRUCT lpcs, CCreateContext* pContext) {if (!m_wndSplitter.CreateStatic(this, 1, 2,WS_CHILD | WS_VISIBLE)){TRACE("Failed to CreateStaticSplitter\n");return FALSE;}// First splitter paneif (!m_wndSplitter.CreateView(0, 0,RUNTIME_CLASS(CRenderView), CSize(600,500), pContext)){TRACE("Failed to create command view pane\n");return FALSE;}if (!m_wndSplitter.CreateView(0, 1,RUNTIME_CLASS(CFormCommandView), CSize(0,0), pContext)){TRACE("Failed to create command view pane\n");return FALSE;}// Second splitter panereturn TRUE;}4、RenderView.cpp#include "stdafx.h"#include "Tool.h"#include <string.h>#include <time.h>#include <math.h>#include "ToolDoc.h"#include "RenderView.h"#ifdef _DEBUG#define new DEBUG_NEW#undef THIS_FILEstatic char THIS_FILE[] = __FILE__;#endifextern void Render(void);// This is the holding space for the landscape colours.int WinWidth, WinHeigth;unsigned short int comp = 32; // Scale modifier.unsigned short int temp, texture_mapping = FALSE,land_fogging = TRUE, flat_shading = TRUE; float angle, Near, ex, ey, ez, cx, cy, cz;// Initial eye position and vector of sight.static GLfloat speed = 0;// The following code for mouse routines was contributed.// These are used for the motion function.#define FORWARD 1#define UP 2#define TURNLEFT 3#define LOOKUP 5// Mouse position and button.int oldmx = 0, oldmy = 0, mb;// CRenderViewIMPLEMENT_DYNCREATE(CRenderView, CView)BEGIN_MESSAGE_MAP(CRenderView, CView)//{{AFX_MSG_MAP(CRenderView)ON_WM_DESTROY()ON_WM_SIZE()ON_WM_LBUTTONDOWN()ON_WM_LBUTTONUP()ON_WM_MOUSEMOVE()ON_WM_PAINT()ON_WM_CREATE()//}}AFX_MSG_MAP// Standard printing commandsON_COMMAND(ID_FILE_PRINT, CView::OnFilePrint)ON_COMMAND(ID_FILE_PRINT_DIRECT, CView::OnFilePrint)ON_COMMAND(ID_FILE_PRINT_PREVIEW, CView::OnFilePrintPreview)END_MESSAGE_MAP()// CRenderView construction/destructionCRenderView::CRenderView(){// OpenGLm_hGLContext = NULL;m_GLPixelIndex = 0;// Mousem_LeftButtonDown = FALSE;m_RightButtonDown = FALSE;m_CursorRotation = AfxGetApp()->LoadCursor(IDC_CURSOR_ROTATION);// ColorsCToolApp *pApp = (CToolApp *)AfxGetApp();m_ClearColorRed = GetRValue(pApp->m_OptionColorGlBack);m_ClearColorGreen = GetGValue(pApp->m_OptionColorGlBack);m_ClearColorBlue = GetBValue(pApp->m_OptionColorGlBack); ReadData();WinWidth=1000;WinHeigth=800;LoadAllTexture();InitLookAt();}//============================================// InitGeometry//============================================void CRenderView::InitGeometry(void){GLfloat fogColor[4] = {0.75, 0.75, 1.0, 1.0};speed = 0;srand(224);srand((unsigned)time(NULL));glPixelStorei(GL_UNPACK_ALIGNMENT, 1);glEnable(GL_DEPTH_TEST);glShadeModel(GL_FLAT);glFogi(GL_FOG_MODE, GL_LINEAR);glFogfv(GL_FOG_COLOR, fogColor);glFogf(GL_FOG_DENSITY, 0.8f);glFogf(GL_FOG_START, 400.0f);glFogf(GL_FOG_END, 500.0f);glClearColor(0.75f, 0.75f, 1.0f, 1.0f);}CRenderView::~CRenderView(){FreeAllTexture();freelist();}BOOL CRenderView::PreCreateWindow(CREATESTRUCT& cs){return CView::PreCreateWindow(cs);}// CRenderView drawingvoid CRenderView::OnDraw(CDC* pDC){}BOOL CRenderView::OnPreparePrinting(CPrintInfo* pInfo){return DoPreparePrinting(pInfo);}void CRenderView::OnBeginPrinting(CDC* /*pDC*/, CPrintInfo* /*pInfo*/) {}void CRenderView::OnEndPrinting(CDC* /*pDC*/, CPrintInfo* /*pInfo*/) {}// CRenderView diagnostics#ifdef _DEBUGvoid CRenderView::AssertValid() const{CView::AssertValid();}void CRenderView::Dump(CDumpContext& dc) const{CView::Dump(dc);}CToolDoc* CRenderView::GetDocument() // non-debug version is inline{if (m_pDocument){ASSERT(m_pDocument->IsKindOf(RUNTIME_CLASS(CToolDoc)));return (CToolDoc*)m_pDocument;}else return NULL;}#endif //_DEBUG// Create OpenGL rendering contextint CRenderView::OnCreate(LPCREATESTRUCT lpCreateStruct) {if (CView::OnCreate(lpCreateStruct) == -1)return -1;HWND hWnd = GetSafeHwnd();HDC hDC = ::GetDC(hWnd);if(SetWindowPixelFormat(hDC)==FALSE)return 0;if(CreateViewGLContext(hDC)==FALSE)return 0;// Default modeglPolygonMode(GL_FRONT,GL_FILL);glPolygonMode(GL_BACK,GL_FILL);glShadeModel(GL_FLAT);// light must be disabled// while rendering the terrain// because it has no normal definitionInitGeometry();glEnable(GL_TEXTURE_2D);glDisable(GL_LIGHTING);return 0;}BOOL CRenderView::SetWindowPixelFormat(HDC hDC){PIXELFORMATDESCRIPTOR pixelDesc;pixelDesc.nSize = sizeof(PIXELFORMATDESCRIPTOR);pixelDesc.nVersion = 1;pixelDesc.dwFlags = PFD_DRAW_TO_WINDOW | PFD_SUPPORT_OPENGL | PFD_DOUBLEBUFFER | PFD_STEREO_DONTCARE;pixelDesc.iPixelType = PFD_TYPE_RGBA;olorBits = 32;pixelDesc.cRedBits = 8;pixelDesc.cRedShift = 16;pixelDesc.cGreenBits = 8;pixelDesc.cGreenShift = 8;pixelDesc.cBlueBits = 8;pixelDesc.cBlueShift = 0;pixelDesc.cAlphaBits = 0;pixelDesc.cAlphaShift = 0;pixelDesc.cAccumBits = 64;pixelDesc.cAccumRedBits = 16;pixelDesc.cAccumGreenBits = 16;pixelDesc.cAccumBlueBits = 16;pixelDesc.cAccumAlphaBits = 0;pixelDesc.cDepthBits = 32;pixelDesc.cStencilBits = 8;pixelDesc.cAuxBuffers = 0;pixelDesc.iLayerType = PFD_MAIN_PLANE;pixelDesc.bReserved = 0;pixelDesc.dwLayerMask = 0;pixelDesc.dwVisibleMask = 0;pixelDesc.dwDamageMask = 0;m_GLPixelIndex = ChoosePixelFormat(hDC,&pixelDesc);if(m_GLPixelIndex == 0) // Choose default{m_GLPixelIndex = 1;if(DescribePixelFormat(hDC,m_GLPixelIndex,sizeof(PIXELFORMATDESCRIPTOR),&pixelDesc)==0)return FALSE;}if(!SetPixelFormat(hDC,m_GLPixelIndex,&pixelDesc))return FALSE;return TRUE;}// Create an OpenGL rendering contextBOOL CRenderView::CreateViewGLContext(HDC hDC){m_hGLContext = wglCreateContext(hDC);if(m_hGLContext==NULL)return FALSE;if(wglMakeCurrent(hDC,m_hGLContext)==FALSE)return FALSE;return TRUE;}// Cleanup every OpenGL rendering contextvoid CRenderView::OnDestroy(){if(wglGetCurrentContext() != NULL)wglMakeCurrent(NULL,NULL);if(m_hGLContext != NULL){wglDeleteContext(m_hGLContext);m_hGLContext = NULL;}CView::OnDestroy();}void CRenderView::OnSize(UINT nType, int cx, int cy) {CView::OnSize(nType, cx, cy);// Set OpenGL perspective, viewport and modeCSize size(cx,cy);double aspect;aspect = (cy == 0) ? (double)size.cx : (double)size.cx/(double)size.cy;glViewport(0, 0, (GLsizei) cx, (GLsizei) cy);glMatrixMode(GL_PROJECTION);glLoadIdentity();gluPerspective(60.0, (GLfloat) cx/(GLfloat) cy, 1.0f, 500.0f);glMatrixMode(GL_MODELVIEW);glLoadIdentity();gluLookAt (ex, ey, ez, cx, cy, cz, 0.0f, 1.0f, 0.0f);}void CRenderView::OnLButtonDown(UINT nFlags, CPoint point){m_LeftButtonDown = TRUE;m_LeftDownPos = point;CView::OnLButtonDown(nFlags, point);}void CRenderView::OnLButtonUp(UINT nFlags,CPoint point){m_LeftButtonDown = FALSE;CView::OnLButtonUp(nFlags, point);}void CRenderView::OnMouseMove(UINT nFlags, CPoint point){switch(nFlags){case(MK_LBUTTON):MoveEye(FORWARD,(GLfloat)(oldmy-point.y)/5.0f,1);break;case(MK_RBUTTON):MoveEye(TURNLEFT, (GLfloat)(oldmx-point.x), 1);break;}oldmy = point.y;oldmx = point.x;Invalidate(FALSE);CView::OnMouseMove(nFlags, point);}void CRenderView::OnPaint(){// Device context for paintingCPaintDC dc(this);// Useful in singledoc templatesHWND hWnd = GetSafeHwnd();HDC hDC = ::GetDC(hWnd);wglMakeCurrent(hDC,m_hGLContext);glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);glClearColor(m_ClearColorRed,m_ClearColorGreen,m_ClearColorBlue,1.0f); glPushMatrix();glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);InitRenderWin();Render();// Double buffersSwapBuffers(hDC);}// Function that moves the eye or turns the angle of sight.// Updates scene if update != 0.void CRenderView::MoveEye(int type, GLfloat amount, int update){GLfloat a;switch(type){case FORWARD:a = sqrt((cx-ex)*(cx-ex)+(cz-ez)*(cz-ez));ex = (amount*(cx-ex)+a*ex) / a;ez = (amount*(cz-ez)+a*ez) / a;cx = (amount*(cx-ex)+a*cx) / a;cz = (amount*(cz-ez)+a*cz) / a;break;case TURNLEFT:cx = (cx-ex)*(float)cos(amount/360.0f) + (cz-ez)*(float)sin(amount/360.0f)+ex;cz = (cz-ez)*(float)cos(amount/360.0f) - (cx-ex)*(float)sin(amount/360.0f)+ez;break;case UP:ey += amount;break;case LOOKUP:cy += amount;break;}if (update){glMatrixMode(GL_MODELVIEW);glLoadIdentity();gluLookAt(ex, ey, ez, cx, cy, cz, 0.0f,1.0f,0.0f);}}TEXTURE_2D **TextureList;OBJECT *ObjectList; /* ObjectList[0]:isolated surfaces*/INT4S ObjectNum;char gEnergyFile[30];char sLookAtFN[100];char ImageName[30];void CRenderView::ReadData(){int i,j,l;FILE *fp;char stemp[100];POINT3D *plist;INT4U nAllVertexNum;INT4U *pchlist;strcpy(gEnergyFile,"room.ed");fp = fopen( gEnergyFile, "r" );if ( fp == NULL ){printf( "\n Can not open energy data file:%s\n", gEnergyFile); exit(0);}fseek( fp, 0, SEEK_SET);/****** read texture list ******/fscanf( fp, "%s", stemp);while( strcmp( stemp,"texnum" ) != 0) fscanf( fp, "%s", stemp);fscanf( fp, "%d", &texnum );TextureList = (TEXTURE_2D **)malloc( sizeof(TEXTURE_2D)*(texnum+1)); for(i=1; i<=texnum; i++){TextureList[i] = (TEXTURE_2D *)malloc( sizeof(TEXTURE_2D));fscanf( fp, "%s%s", TextureList[i]->fname, stemp );if ( strcmp( stemp,"REPEAT_TEXTURE" ) == 0)TextureList[i]->type = 1;else if ( strcmp( stemp,"CLAMP_TEXTURE" ) == 0)TextureList[i]->type = 0;}/****** Read object list ******/fscanf( fp, "%s", stemp);while( strcmp( stemp,"ObjectNum" ) != 0) fscanf(fp,"%s",stemp);fscanf( fp, "%ld", &ObjectNum);ObjectList = (OBJECT *)malloc( sizeof(OBJECT ) * ObjectNum);for(i = 0; i < ObjectNum; i ++ ){f scanf( fp, "%s", stemp);w hile( strcmp( stemp,"SurfaceNum" ) != 0) fscanf(fp,"%s",stemp);f scanf( fp, "%ld", &(ObjectList[i].SurfNum) );ObjectList[i].surflist = (SURFACE *)malloc( sizeof(SURFACE) * ObjectList[i].SurfNum);for(j = 0; j < ObjectList[i].SurfNum; j ++ ){/****** Read surface infor ******/fscanf( fp, "%s", stemp);while( strcmp( stemp,"TextureId" ) != 0) fscanf(fp,"%s",stemp);fscanf( fp, "%d", &(ObjectList[i].surflist[j].texId) );fscanf( fp, "%s", stemp);while( strcmp( stemp,"pointnum" ) != 0) fscanf(fp,"%s",stemp);fscanf( fp, "%d", &(ObjectList[i].surflist[j].pointn) );fscanf( fp, "%s", stemp);while( strcmp( stemp,"triangle" ) != 0) fscanf(fp,"%s",stemp);fscanf( fp, "%d", &(ObjectList[i].surflist[j].triangle) );fscanf( fp, "%s", stemp);while( strcmp( stemp,"quadrangle" ) != 0) fscanf(fp,"%s",stemp);fscanf( fp, "%d", &(ObjectList[i].surflist[j].quadric) );/****** Read point list ******/ObjectList[i].surflist[j].pointlist = (POINT3D*)malloc(sizeof(POINT3D) *ObjectList[i].surflist[j].pointn);plist = ObjectList[i].surflist[j].pointlist;for( l = 0; l < ObjectList[i].surflist[j].pointn ; l ++ )fscanf( fp, "%f%f%f%f%f%f%f%f",&(plist[l].r), &(plist[l].g), &(plist[l].b),&(plist[l].u), &(plist[l].v),&(plist[l].x), &(plist[l].y), &(plist[l].z) );/****** Read patchlist ******/nAllVertexNum = ObjectList[i].surflist[j].triangle * 3 +ObjectList[i].surflist[j].quadric *4 ;ObjectList[i].surflist[j].patchlist = (INT4U *)malloc( sizeof(INT4U) * nAllVertexNum);pchlist = ObjectList[i].surflist[j].patchlist;for( l = 0; l < nAllVertexNum; l ++ )fscanf( fp, "%ld", &(pchlist[l]) );}}fclose(fp);}void CRenderView::InitLookAt(){FILE *fp;strcpy(sLookAtFN,"room.lk");fp = fopen(sLookAtFN, "rb");if (fp == NULL){ex = ey = ez =1.0f;cx = cy = cz =0.0f;Near = 0.1f;angle = 30.0f;}else fscanf(fp, "%f%f%f%f%f%f%f%f", &angle, &Near, &ex, &ey, &ez, &cx, &cy, &cz);fclose(fp);}void C RenderView::InitRenderWin(){glShadeModel ( GL_SMOOTH );glDepthFunc ( GL_LESS );glEnable ( GL_DEPTH_TEST );glMatrixMode ( GL_PROJECTION );glLoadIdentity();glMatrixMode ( GL_MODELVIEW );glLoadIdentity();gluPerspective ( angle, (float)WinWidth/(float)WinHeigth, Near, 1000000000.0); gluLookAt( ex, ey, ez, cx, cy, cz, 0.0, 1.0, 0.0);}void C RenderView::Render(void){int i, j, k, l, m, TexIndex;POINT3D *plist;INT4U *pchlist;glClear (GL_COLOR_BUFFER_BIT|GL_DEPTH_BUFFER_BIT|GL_ACCUM_BUFFER_BIT);for(i = 0; i < ObjectNum; i ++ )for(j = 0; j < ObjectList[i].SurfNum; j ++ ){TexIndex = ObjectList[i].surflist[j].texId;if( TexIndex > 0 )InitTex( TexIndex );plist = ObjectList[i].surflist[j].pointlist;pchlist = ObjectList[i].surflist[j].patchlist;l = 0;for ( k = 0; k < ObjectList[i].surflist[j].triangle; k ++){glBegin( GL_TRIANGLES );for( m = 0; m < 3; m ++ ){glColor3f ( plist[pchlist[l]].r,plist[pchlist[l]].g,plist[pchlist[l]].b );glTexCoord2f( plist[pchlist[l]].u,plist[pchlist[l]].v );glVertex3f( plist[pchlist[l]].x,plist[pchlist[l]].y,plist[pchlist[l]].z );l ++;}/* m */glEnd();}/* k */for ( k = 0; k < ObjectList[i].surflist[j].quadric; k ++){glBegin( GL_QUADS );for( m = 0; m < 4; m ++ ){glColor3f ( plist[pchlist[l]].r,plist[pchlist[l]].g,plist[pchlist[l]].b );glTexCoord2f( plist[pchlist[l]].u,plist[pchlist[l]].v );glVertex3f( plist[pchlist[l]].x,plist[pchlist[l]].y,plist[pchlist[l]].z );l ++;}/* m */glEnd();}/* k */glFlush();CloseTex();}}void CRenderView::freelist(){int i, j;for( i=0; i<ObjectNum; i++){for( j=0; j<ObjectList[i].SurfNum; j++){free(ObjectList[i].surflist[j].pointlist);free(ObjectList[i].surflist[j].patchlist);}free( ObjectList[i].surflist );}free(ObjectList);for(i=1; i<=texnum; i++)free(TextureList[i]);free(TextureList);}extern TEXTURE_2D **TextureList;/********************************//* function : OpenTexImage *//********************************/unsigned char *CRenderView::OpenTexImage( INT2U TexIndex, INT2U *rslx, INT2U *rsly ){unsigned char *image;FILE *fp;INT2U srcx, srcy;INT4U i, j;char ImageName[30];unsigned char *SImageData;int rc;int width, height;strcpy( ImageName, TextureList[TexIndex]->fname);/* load a image */fp = fopen(ImageName,"rb");if(!fp) return 0;fseek(fp,18L,0);rc=fread(&width,sizeof(long),1,fp);rc=fread(&height,sizeof(long),1,fp);*rslx=srcx=width; *rsly=srcy=height;fseek(fp,54L,0);image = (unsigned char *)malloc(width*height*3);rc=fread(image,width*height*3,1,fp);fclose(fp);SImageData = (unsigned char *)malloc(srcx*srcy*3);for(i=0; i<srcx; i++) {for(j=0; j<srcy; j++) {(unsigned char)*(SImageData+i*srcx*3+j*3+0) = (unsignedchar)*(image+i*srcx*3+j*3+2);(unsigned char)*(SImageData+i*srcx*3+j*3+1) = (unsigned char)*(image+i*srcx*3+j*3+1);(unsigned char)*(SImageData+i*srcx*3+j*3+2) = (unsigned char)*(image+i*srcx*3+j*3+0);}}free(image);printf("%s : %ld=%ld\n", ImageName, srcx*srcy*3,i*j*3);return( SImageData );}/********************************//* function : InitTex *//********************************/void C RenderView::InitTex( int TexIndex ){INT2U TextType;unsigned char *ImageData;static int OldIndex = -1;if(TexIndex<=0) return;if(TexIndex == OldIndex){glEnable(GL_TEXTURE_2D);return;}ImageData = ImageDatas[TexIndex-1];TextType = TextureList[TexIndex]->type;glPixelStorei(GL_UNPACK_ALIGNMENT, 1);glTexEnvf(GL_TEXTURE_ENV, GL_TEXTURE_ENV_MODE, GL_MODULATE);glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST);glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST);if( TextType == CLAMP_TEXTURE ){glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_CLAMP);glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_CLAMP);}else{glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);glTexParameterf(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_REPEAT);}glTexImage2D( GL_TEXTURE_2D, 0, 3, rslxs[TexIndex-1], rslys[TexIndex-1], 0,GL_RGB, GL_UNSIGNED_BYTE, ImageData );glEnable(GL_TEXTURE_2D);OldIndex = TexIndex;}/********************************//* function : CloseTex *//********************************/void C RenderView::CloseTex(){glDisable(GL_TEXTURE_2D);}void CRenderView::LoadAllTexture(){int i;for (i=0; i <texnum ; i++)ImageDatas[i] = OpenTexImage( i+1, &rslxs[i], &rslys[i] );}void CRenderView::FreeAllTexture(){int i;for (i=0; i <texnum ; i++)free(ImageDatas[i]);}5、StdAfx.cpp#include "stdafx.h"6、Tool.cpp#include "stdafx.h"#include "Tool.h"#include "DlgAbout.h"#include "MainFrm.h"#include "ToolDoc.h"#include "RenderView.h"// Download by #ifdef _DEBUG#define new DEBUG_NEW#undef THIS_FILEstatic char THIS_FILE[] = __FILE__;#endif// CToolAppCToolDoc *MyDocument;BEGIN_MESSAGE_MAP(CToolApp, CWinApp)//{{AFX_MSG_MAP(CToolApp)ON_COMMAND(ID_APP_ABOUT, OnAppAbout)//}}AFX_MSG_MAP// Standard file based document commands// Standard print setup commandON_COMMAND(ID_FILE_PRINT_SETUP, CWinApp::OnFilePrintSetup) END_MESSAGE_MAP()// CToolApp constructionCToolApp::CToolApp(){// Optionsm_OptionColorGlBack = RGB(0,0,255);}// The one and only CToolApp objectCToolApp theApp;// CToolApp initializationBOOL CToolApp::InitInstance(){AfxEnableControlContainer();// Standard initialization// If you are not using these features and wish to reduce the size// of your final executable, you should remove from the following// the specific initialization routines you do not need.#ifdef _AFXDLLEnable3dControls(); // Call this when using MFC in a shared DLL#elseEnable3dControlsStatic(); // Call this when linking to MFC statically#endif// Change the registry key under which our settings are stored.// You should modify this string to be something appropriate// such as the name of your company or organization.SetRegistryKey(_T("3D Toolbox"));LoadStdProfileSettings(10); // Load standard INI file options (including MRU)// Register the application's document templates. Document templates// serve as the connection between documents, frame windows and views.CSingleDocTemplate* pDocTemplate;// create main SDI Frame windowCMainFrame* pMainFrame = new CMainFrame;if (!pMainFrame->LoadFrame(IDR_MAINFRAME))return FALSE;m_pMainWnd = pMainFrame;pDocTemplate = new CSingleDocTemplate(IDR_MODELTYPE,RUNTIME_CLASS(CToolDoc),RUNTIME_CLASS(CMainFrame),RUNTIME_CLASS(CRenderView));AddDocTemplate(pDocTemplate);// The main window has been initialized, so show and update it.//pMainFrame->ShowWindow(SW_SHOWMAXIMIZED);pMainFrame->ShowWindow(SW_SHOW);pMainFrame->UpdateWindow();return TRUE;}// App command to run the dialogvoid CToolApp::OnAppAbout(){CAboutDlg aboutDlg;aboutDlg.DoModal();}6、ToolDoc.cpp#include "stdafx.h"#include "math.h"#include "Tool.h"#include "ToolDoc.h"#ifdef _DEBUG#define new DEBUG_NEW#undef THIS_FILEstatic char THIS_FILE[] = __FILE__;#endifIMPLEMENT_DYNCREATE(CToolDoc, CDocument)BEGIN_MESSAGE_MAP(CToolDoc, CDocument)//{{AFX_MSG_MAP(CToolDoc)// NOTE - the ClassWizard will add and remove mapping macros here.// DO NOT EDIT what you see in these blocks of generated code!//}}AFX_MSG_MAPEND_MESSAGE_MAP()extern CToolApp theApp;// CToolDoc construction/destruction。
计算机学院12计算机科学与技术专业3班学号3112005883姓名:曲绍霖教师评定:实验三交互与运动的实现一、实验目的掌握OpenGL的纹理贴图绘制方法二、实验要求在Windows平台上用VC++结合GLUT做实验,要求掌握结合VC++和OpenGL的纹理模型的理解及实现,实验完成后要求根据自己的成果撰写一份实验报告。
三、实验环境操作系统:Windows xp开发环境:VC++6.0以及GLUT图形交互设备:鼠标和键盘四、实验内容在前面实验的基础上增加键盘和鼠标交互和物体的运动。
五、存在的问题和感想这次实验相对于前面的实验难度较大,要经过多次的调试才能通过,通过之后还不能达到理想的效果,但是经过我的认真学习关于纹理的知识,最后经过认真学习给的例子,最后还是顺利地做出了实验要求的效果。
实现代码:#include<windows.h>#include <stdlib.h>#include<stdio.h>#include <GL/glew.h>#include <GL/glut.h>//模式选择开关int iModel=1;//图形旋转方向开关int ispin=1;static GLfloat xRot = 0.0f; //x方向旋转参数static GLfloat yRot = 0.0f; //y方向旋转参数//初始化OpenGL绘制环境void init(void){glClearColor(1.0,1.0,1.0,0.0);//背景颜色为白色glEnable(GL_DEPTH_TEST);//这句是启用深度测试,这样,在后面的物体会被挡着glShadeModel(GL_SMOOTH);glEnable(GL_CULL_FACE);glFrontFace(GL_CCW);}void myDisplay(void){glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT); // 清除屏幕和深度缓存glLoadIdentity();// 重置当前的模型观察矩阵gluLookAt(2.0,2.0,5.0,0.0,0.0,0.0,0.0,1.0,0.0);//设置图元描述的视角//设置正方体旋转并绘制glRotatef(xRot, 1.0f, 0.0f, 0.0f);glRotatef(yRot, 0.0f, 1.0f, 0.0f);glBegin(GL_QUADS);glColor3f(0.0f,1.0f,0.0f); // 颜色改为绿色glVertex3f( 1.0f, 1.0f,-1.0f); // 四边形的右上顶点(顶面)glColor3f(1.0f,0.0f,0.0f); //颜色改为红色glVertex3f(-1.0f, 1.0f,-1.0f); // 四边形的左上顶点(顶面)glColor3f(0.0f,0.0f,1.0f); // 颜色改成蓝色glVertex3f(-1.0f, 1.0f, 1.0f); // 四边形的左下顶点(顶面)glColor3f(1.0f,0.5f,0.0f); // 颜色改成橙色glVertex3f( 1.0f, 1.0f, 1.0f); // 四边形的右下顶点(顶面)glColor3f(0.0f,1.0f,0.0f); // 颜色改为绿色glVertex3f( 1.0f,-1.0f, 1.0f); // 四边形的右上顶点(底面)glColor3f(1.0f,0.0f,0.0f); //颜色改为红色glVertex3f(-1.0f,-1.0f, 1.0f); // 四边形的左上顶点(底面)glColor3f(0.0f,0.0f,1.0f); // 颜色改成蓝色glVertex3f(-1.0f,-1.0f,-1.0f); // 四边形的左下顶点(底面)glColor3f(1.0f,0.5f,0.0f); // 颜色改成橙色glVertex3f( 1.0f,-1.0f,-1.0f); // 四边形的右下顶点(底面)glColor3f(1.0f,0.5f,0.0f); // 颜色改成橙色glVertex3f( 1.0f, 1.0f, 1.0f); // 四边形的右上顶点(前面)glColor3f(0.0f,0.0f,1.0f); // 颜色改成蓝色glVertex3f(-1.0f, 1.0f, 1.0f); // 四边形的左上顶点(前面)glColor3f(1.0f,0.0f,0.0f); //颜色改为红色glVertex3f(-1.0f,-1.0f, 1.0f); // 四边形的左下顶点(前面)glColor3f(0.0f,1.0f,0.0f); // 颜色改为绿色glVertex3f( 1.0f,-1.0f, 1.0f); // 四边形的右下顶点(前面)glColor3f(1.0f,0.5f,0.0f); // 颜色改成橙色glVertex3f( 1.0f,-1.0f,-1.0f); // 四边形的右上顶点(后面)glColor3f(0.0f,0.0f,1.0f); // 颜色改成蓝色glVertex3f(-1.0f,-1.0f,-1.0f); // 四边形的左上顶点(后面)glColor3f(1.0f,0.0f,0.0f); //颜色改为红色glVertex3f(-1.0f, 1.0f,-1.0f); // 四边形的左下顶点(后面)glColor3f(0.0f,1.0f,0.0f); // 颜色改为绿色glVertex3f( 1.0f, 1.0f,-1.0f); // 四边形的右下顶点(后面)glColor3f(0.0f,0.0f,1.0f); // 颜色改成蓝色glVertex3f(-1.0f, 1.0f, 1.0f); // 四边形的右上顶点(左面)glColor3f(1.0f,0.0f,0.0f); //颜色改为红色glVertex3f(-1.0f, 1.0f,-1.0f); // 四边形的左上顶点(左面)glColor3f(0.0f,0.0f,1.0f); // 颜色改成蓝色glVertex3f(-1.0f,-1.0f,-1.0f); // 四边形的左下顶点(左面)glColor3f(1.0f,0.0f,0.0f); //颜色改为红色glVertex3f(-1.0f,-1.0f, 1.0f); // 四边形的右下顶点(左面)glColor3f(0.0f,1.0f,0.0f); // 颜色改为绿色glVertex3f( 1.0f, 1.0f,-1.0f); // 四边形的右上顶点(右面)glColor3f(1.0f,0.5f,0.0f); // 颜色改成橙色glVertex3f( 1.0f, 1.0f, 1.0f); // 四边形的左上顶点(右面)glColor3f(0.0f,1.0f,0.0f); // 颜色改为绿色glVertex3f( 1.0f,-1.0f, 1.0f); // 四边形的左下顶点(右面)glColor3f(1.0f,0.5f,0.0f); // 颜色改成橙色glVertex3f( 1.0f,-1.0f,-1.0f); // 四边形的右下顶点(右面)glEnd();//正方体绘制结束glFlush();//强制刷新glutSwapBuffers(); //双缓冲}//设窗口的坐标void reshape(int w,int h){glViewport(0,0,(GLsizei)w,(GLsizei)h);glMatrixMode(GL_PROJECTION);glLoadIdentity();gluPerspective(40.0,(GLfloat)w/(GLfloat)h,1.0,20.0);glMatrixMode(GL_MODELVIEW);glLoadIdentity();}//键盘控制void SpecialKeys(int key,int x,int y){//上下左右键控制正方体旋转if(iModel==2){if(key == GLUT_KEY_UP) xRot -= 5.0f;if(key == GLUT_KEY_DOWN) xRot += 5.0f;if(key == GLUT_KEY_LEFT) yRot -= 5.0f;if(key == GLUT_KEY_RIGHT) yRot += 5.0f;if(xRot > 356.0f) xRot = 0.0f;if(xRot < -1.0f) xRot = 355.0f;if(yRot > 356.0f) yRot = 0.0f;if(yRot < -1.0f) yRot = 355.0f;}glutPostRedisplay();}void keyboard(unsigned char key, int x, int y){switch (key){case 27: // 当按下键盘的esc键的时候退出exit(0);break;}}//鼠标控制旋转轴void mouse(int btn, int state, int x, int y){if(btn==GLUT_LEFT_BUTTON && state==GLUT_DOWN)ispin=~ispin;}//设置刷新时间void TimerFunction(int value){glutPostRedisplay();//设置自动旋转if(iModel==1){if(ispin==1){yRot+=10;if(yRot>=360)yRot-=360;}else{xRot+=10;if(xRot>=360)xRot-=360;}}glutTimerFunc(100,TimerFunction,1);}//菜单选项设置void nMenu(int value){switch(value){//1、2为旋转自动或手动case 1:iModel=1;xRot=0,yRot=0;ispin=1;break;case 2:iModel=2;xRot=0,yRot=0;ispin=1;break;}glutPostRedisplay();}int main(int argc, char *argv[]){glutInit(&argc, argv);glutInitDisplayMode(GLUT_DOUBLE | GLUT_RGB | GLUT_DEPTH);glutInitWindowPosition(100, 100);glutInitWindowSize(800,600);// 设置窗口大小800*600glutCreateWindow("键盘鼠标交互下的正方体");//创建右键选择菜单int nRotatefMenu = glutCreateMenu(nMenu);glutAddMenuEntry("自动旋转",1); //创建图元描述菜单glutAddMenuEntry("手动旋转",2);int nMainMenu = glutCreateMenu(nMenu); //创建主菜单glutAddSubMenu("旋转", nRotatefMenu);glutAttachMenu(GLUT_RIGHT_BUTTON);glutTimerFunc(100,TimerFunction,1);init();glutSpecialFunc(SpecialKeys);glutKeyboardFunc(keyboard);glutMouseFunc (mouse);glutDisplayFunc(myDisplay);glutReshapeFunc(reshape);glutMainLoop();return 0;}运行结果:鼠标右键菜单选择旋转模式自动旋转鼠标左键控制旋转轴(左图)手动旋转键盘控制旋转方向(右图)。
探究OpenGL光照模型的着色器实现探究OpenGL光照模型的着色器实现OpenGL的着色器是新一代显卡提供给开发者一个小程序,为的是让开发者对光照、坐标转换以及像素进行一些个性化的处理。
OpenGL的着色器有一种专门的语言:GLSL,现在的GLSL应该全面转向Shader Model5,像我这样的初学者还需要花费更长的时间来学习才能基本了解OpenGL的着色器方面的知识。
下面两图展示了OpenGL从固定渲染管线到可编程渲染管线的变化从图中我们可以很容易地看出,OpenGL的顶点着色器取代了固定渲染管线的转换、光照、纹理坐标生成和转换;片断着色器取代了纹理、颜色求和和雾的操作。
在OpenGL3.2版本中加入了几何着色器(GeometryShader)这个概念,在OpenGL4.0中又添加了分格化控制(Tessellation Control)和分格化评估(Tessellation Evaluation)着色器,最新的OpenGL版本4.3则添加了计算着色器(Compute Shader)。
看来OpenGL的着色器真是越来越复杂,越来越重要了。
下面介绍一下光照模型在顶点着色器的实现,所有的内容都可以在《OpenGL超级宝典(第四版)》中找到。
漫反射光照是一种简单的光照模型,它只考虑漫反射。
它的公式是:N是顶点的单位法线,L是表示从顶点到光源的单位向量方向。
C mat 是表面材料的颜色,C li 是光线的颜色,C diff 是最终的散射颜色。
注意,N和L在传入之前一定要单位化。
如果用顶点着色器来实现的话,则是:uniform vec3 lightPos[1];void main( void ){// 法线的MVP变换gl_Position = gl_ModelViewProjectionMatrix * gl_Vertex;vec3 N = normalize( gl_NormalMatrix * gl_Normal );vec4 V = gl_ModelViewMatrix * gl_Vertex;vec3 L = normalize( lightPos[0] - V.xyz );// 输出散射颜色float NdotL = dot( N, L );gl_FrontColor = gl_Color * vec4( max( 0.0, NdotL ) );}注意,这里lightPos是一个标记为uniform的变量,这意味着可以在运行期传入的一个值到lightPos中来改变着色器的行为。
计算机学院09计算机科学与技术专业 04 班学号:3109006029 姓名:冯沐强协作者:________ 教师评定: _________一、实验目的1 掌握OpenGL的三维图形绘制方法2 掌握Visual C++环境下的OpenGL图形开发二、实验要求在Windows平台上用VC++结合GLUT做实验,要求掌握结合VC++和OpenGL的基本图形(四面体、六面体、圆柱、圆锥等)建模及编程技能,以及图形学的基本原理,实验完成后要求根据自己的成果撰写一份实验报告。
1 基本三维几何图形(四面体、六面体、圆柱、球等)的建模及基本的交互2 人机交互(图形的基本变换,如旋转、平移、尺度缩放及橡皮筋技术等)三、实验环境操作系统:Windows xp开发环境:VC以及GLUT图形交互设备:鼠标和键盘四、实验内容1 GLUT在VC环境下的正确配置下载GLUT包,解压后,文件夹中有dll,lib,h文件,将,复制到C:\WINDOWS\system32下,将glut32.lib, 放到C:\Program Files\Microsoft Visual Studio\VC98\Lib(即安装的目录),将复制到C:\ProgramFiles\Microsoft Visual Studio\VC98\Include\GL2对基本图形(四面体,六面体,圆柱,球等)的建模及基本交互。
a 在上述四种图形的中选择两种及两种以上进行建模或者组合他们产生新的对象。
b 基本的交互包括:利用鼠标、键盘实现图像的交互(主要实现物体的浏览)void RenderScene(void)五、存在的问题和感想话说我配置OPENGL占用了大量时间。
第一次使用Opengl,对其函数没底,是一边看opengl函数查询.CHM ,一边做的。
发现只要按其函数名找函数,查找使用方法和里面的参数的运用,很容易上手。
通过本实验,使我掌握了Opengl在VC上的配置和Opengl部分函数的使用。
计算机图形学实验报告姓名:_____________学号:_____________班级:_____________时间:_____2016年12月_________实验一OpenGL编程与图形绘制1.实验目的了解OpenGL编程,并熟悉OpenGL的主要功能、绘制流程和基本语法。
学会配置OpenGL环境,并在该环境中编程绘图。
2.实验内容OpenGL的主要功能:模型绘制、模型观察、颜色模式、光照应用、图像效果增强、位图和图像处理、纹理映射、实时动画和交互技术。
OpenGL的绘制流程分为两个方面:一个完整的窗口系统的OpenGL图形处理系统的结构为:最底层为图形硬件,第二层为操作系统,第三层为窗口系统,第四层为OpenGL,最上面的层为应用软件;OpenGL命令将被放在一个命令缓冲区中,这样命令缓冲区中包含了大量的命令、顶点数据和纹理数据。
当缓冲区被清空时,缓冲区中的命令和数据都将传递给流水线的下一个阶段。
OpenGL的基本语法中相关库有:OpenGL核心库:gl、OpenGL实用程序库:glu、OpenG 编程辅助库:aux、OpenGL实用程序工具包(OpenGL utility toolkit,GLUT):glut、Windows 专用库:wgl。
OpenGL的基本语法中命名规则为:OpenGL函数都遵循一个命名约定,即采用以下格式:<库前缀><根命令〉〈可选的参数个数><可选的参数类型〉。
了解了上述基础知识后,配置好OpenGL环境,然后在该环境中编程练习图形的绘制,本次实验主要是对点的绘制、直线的绘制和多边形面的绘制。
3.实验代码及结果3。
1点的绘制:#include〈gl/glut。
h>void Initial(void){glClearColor(1.0f,1.0f,1。
0f,1.0f);//设置窗口背景颜色为白色glMatrixMode(GL_PROJECTION); //指定设置投影参数gluOrtho2D(0。
OpenGL图形库中的渲染管线与着色器编程OpenGL是一个用于图形渲染的开放式图形库,它提供了一个强大的渲染管线和着色器编程功能,使得开发人员能够创建复杂的图形效果。
本文将介绍OpenGL中的渲染管线和着色器编程,并深入解释它们的工作原理和实际应用。
第一部分:渲染管线的概念和原理渲染管线是一个用于在屏幕上绘制图形的过程,它是由一系列的阶段组成的,每个阶段都有特定的功能。
在OpenGL中,渲染管线主要包括几何处理、顶点处理、光栅化、片元处理等阶段。
下面是每个阶段的功能和工作流程。
1.几何处理阶段在几何处理阶段,输入的几何数据被处理和转换成屏幕空间的顶点值,这些顶点值将作为渲染管线的输入。
几何处理阶段通常包括了几何变换、裁剪和投影变换等操作。
在这个阶段,输入的顶点数据会经过一系列矩阵变换,最终转换成屏幕上的像素坐标。
2.顶点处理阶段在顶点处理阶段,每个顶点都被处理成最终的片元坐标,并根据光照和材质属性进行着色。
在这个阶段,每个顶点的位置、颜色和纹理坐标都被计算出来,并传递给下一个阶段。
这个阶段的输出将作为光栅化阶段的输入。
3.光栅化阶段在光栅化阶段,根据顶点处理阶段的输出,将图形转换成像素形式,并执行逐片元的操作。
光栅化的主要任务是确定片元的位置和颜色,并将它们送入片元处理阶段进行处理。
4.片元处理阶段在片元处理阶段,每个片元都经过光照、材质和纹理等计算,最终确定最终的颜色值。
片元处理阶段的输出将被用来绘制最终的图形。
以上是渲染管线的基本概念和流程,下面将进一步介绍着色器编程在渲染管线中的作用和实现方式。
第二部分:着色器编程的概念和实现着色器是一种在图形渲染管线中执行特定任务的计算单元,它用来对图形数据进行处理和着色,从而生成最终的图形效果。
在OpenGL 中,着色器编程是通过Shader Language(GLSL)来实现的,GLSL是一种专门用于图形着色和计算的编程语言。
在OpenGL中,有几种类型的着色器,分别是顶点着色器、片元着色器、几何着色器和计算着色器。
OpenGL编程实习报告班级:学号:姓名:专业:摄影测量与遥感指导老师:实习目的:1、了解OPENGL绘图原理;熟悉OPENGL的编程步骤;掌握在OPENGL中绘图。
2、实现在VC++6.0环境下在OPENGL中绘图,绘制一个圆形或正方形;实现这个三维物体的变换。
实习原理:OpenGL的基本工作流程为:OpenGL程序的基本结构为定义窗口、清理窗口、绘制物体、结束运行。
其基本操作有:描述图元、绘制图元、OpenGL变换。
在Windows下用GDI作图必须通过设备上下文(DeviceContext简写DC)调用相应的函数;用OpenGL作图也是类似,OpenGL函数是通过"渲染上下文"(RenderingContext简写RC)完成三维图形的绘制。
Windows下的窗口和设备上下文支持"位图格式"(PIXELFORMAT)属性,和RC有着位图结构上的一致。
只要在创建RC时与一个DC建立联系(RC也只能通过已经建立了位图格式的DC来创建),OpenGL的函数就可以通过RC对应的DC画到相应的显示设备上。
实习步骤:1、首先创建工程。
用AppWizard产生一个MFC单文档(SDI)的EXE文件。
选中三维控制(3D Controls),其余保持默认值即可。
2、将此工程所需的OpenGL文件和库加入到工程中。
在工程菜单中,选择"Build"下的"Settings"项。
单击"Link"标签,选择"General"目录,在Object/Library Modules的编辑框中输入"OpenGL32.lib glu32.lib glaux.lib",选择"OK"结束。
然后打开文件"stdafx.h",将语句#include <gl\gl.h>和#include <gl\glu.h>插入到文件中。
基于OpenGL的游戏开发技术研究与实践OpenGL(Open Graphics Library)是一种跨平台的图形编程接口,广泛应用于游戏开发、虚拟现实、科学可视化等领域。
本文将探讨基于OpenGL的游戏开发技术,并结合实际案例进行深入研究与实践。
一、OpenGL简介OpenGL是一种用于渲染2D、3D矢量图形的开放标准图形库,由Silicon Graphics公司(SGI)开发。
它提供了一系列的函数,可以用来绘制复杂的三维场景,实现光照、阴影、纹理映射等效果。
由于其跨平台性和高性能特点,OpenGL被广泛应用于游戏开发领域。
二、OpenGL在游戏开发中的应用1. 游戏引擎许多知名的游戏引擎如Unity3D、Unreal Engine等都使用了OpenGL作为其图形渲染接口。
通过OpenGL,开发者可以实现各种复杂的渲染效果,包括实时阴影、抗锯齿、HDR渲染等,为游戏提供更加逼真的视觉体验。
2. 游戏开发工具除了游戏引擎,许多游戏开发工具也采用了OpenGL作为其图形渲染核心。
例如,Blender是一款知名的开源三维建模软件,它使用OpenGL来实现实时预览和渲染功能,帮助开发者快速创建游戏场景和角色模型。
3. 跨平台性由于OpenGL是跨平台的图形库,可以在Windows、Linux、macOS 等操作系统上运行,因此基于OpenGL开发的游戏具有良好的跨平台兼容性。
这使得开发者可以更轻松地将游戏移植到不同平台上,扩大游戏的受众范围。
三、基于OpenGL的游戏开发技术1. 着色器编程在OpenGL中,着色器是实现各种渲染效果的核心。
开发者可以使用GLSL(OpenGL Shading Language)编写顶点着色器和片元着色器,控制顶点和像素的处理过程。
通过编写高效的着色器代码,可以实现各种复杂的渲染效果。
2. 纹理映射纹理映射是游戏中常用的一种技术,可以给模型表面贴上各种贴图,增加真实感和细节感。
贵州大学实验报告学院:计算计科学与信息学院专业:班级:
这次试验的主要任务是学会配置opengl的运行环境,并通过编写程序来测试能否正确的生成相应的图案,所以还算比较简单的,做实验时只要看一下老师发给我们的ppt,然后按照上面的步骤一步一步的操作就行,先是把下载好的压缩包解压然后找到安装目录,然后将相应的文件放到相
贵州大学实验报告
学院:计算计科学与信息学院专业:数字媒体技术班级:数媒091
贵州大学实验报告
学院:计算计科学与信息学院专业:数字媒体技术班级:数媒091。
opengl开发环境配置实验总结OpenGL是一种跨平台的图形编程接口,可以用于开发各种图形应用程序。
在进行OpenGL开发之前,我们需要配置好开发环境,以便能够顺利进行开发工作。
本文将总结一下关于OpenGL开发环境配置的实验过程和相关经验。
为了进行OpenGL开发,我们需要准备好以下几个工具和库:1. 编程语言:OpenGL可以使用多种编程语言进行开发,例如C++、Java等。
在本次实验中,我们选择使用C++语言进行开发。
2. 集成开发环境(IDE):IDE是进行软件开发的集成工具,可以提供代码编辑、编译、调试等功能。
在本次实验中,我们选择使用Visual Studio作为IDE。
3. OpenGL库:OpenGL库是进行OpenGL开发必备的库文件,包含了各种OpenGL函数和常量的定义。
在本次实验中,我们选择使用GLEW和GLFW这两个常用的OpenGL库。
接下来,我们将一步步进行OpenGL开发环境的配置。
第一步是安装Visual Studio。
我们可以从官方网站上下载Visual Studio的安装包,并按照提示进行安装。
安装完成后,我们打开Visual Studio,新建一个C++项目,选择空项目作为项目类型。
第二步是下载和配置OpenGL库。
我们可以从GLEW和GLFW的官方网站上下载它们的最新版本。
下载完成后,我们将它们的头文件和库文件拷贝到Visual Studio的安装目录下的相应文件夹中。
具体来说,将GLEW的头文件拷贝到include文件夹中,将GLEW 和GLFW的库文件拷贝到lib文件夹中。
第三步是配置Visual Studio项目。
我们需要告诉Visual Studio去哪里找到OpenGL的头文件和库文件。
打开Visual Studio,右击项目名称,选择属性,然后在属性窗口中找到“VC++目录”和“链接器”选项,分别添加头文件和库文件的路径。
在“VC++目录”选项中的“包含目录”中添加GLEW和GLFW的头文件路径,在“链接器”选项中的“附加库目录”中添加GLEW和GLFW的库文件路径。
实验报告学生姓名:学号:专业班级:实验类型:□验证□综合□设计□创新实验日期:2018.11 实验成绩:一、实验名称实验三着色器编程二、实验内容1.利用OpenGL的顶点数组对象、顶点缓冲对象和索引缓冲对象组织图元数据,设置图元属性,进行核心模式的图元渲染。
2.编写顶点着色器、片段着色器代码,进行代码的编译和链接形成着色器程序,采用核心模式绘制OpenGL几何图元。
3.采用文件形式保存着色器代码,编写着色器类,在着色器类中实现着色器代码的加载、编译和链接。
三、实验目的1.掌握顶点数组对象、顶点缓冲对象和索引缓冲对象的创建、数据缓存、属性设置和绑定方法。
2.掌握顶点着色器和片段着色器的定义、代码加载、程序编译方法,着色器程序的定义、链接和使用方法。
3.掌握如何采用面向对象方法封装着色器的代码加载、程序编译方法和链接方法。
四、实验步骤1.新建项目OPengl02,在项目下添加opengl02.cpp文件和glad.c文件;2.在opengl02.cpp文件中,添加代码:(1)定义几何图元的顶点数据和索引数据GLfloat vertices[] = {0.5f, 0.5f, 0.0f, // Top Right0.5f, -0.5f, 0.0f, // Bottom Right-0.5f, -0.5f, 0.0f, // Bottom Left-0.5f, 0.5f, 0.0f // Top Left};GLuint indices[] = { // Note that we start from 0!0, 1, 3, // First Triangle1, 2, 3 // Second Triangle};(2)创建顶点数组对象、顶点缓冲对象和索引缓冲对象,绑定相关对象,缓存数据、设置顶点属性。
GLuint VBO, VAO, EBO;glGenVertexArrays(1, &VAO);glGenBuffers(1, &VBO);glGenBuffers(1, &EBO);// Bind the Vertex Array Object first, then bind and set vertex buffer(s) and attribute pointer(s).glBindVertexArray(VAO);glBindBuffer(GL_ARRAY_BUFFER, VBO);glBufferData(GL_ARRAY_BUFFER, sizeof(vertices), vertices, GL_STATIC_DRAW);glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, EBO);glBufferData(GL_ELEMENT_ARRAY_BUFFER, sizeof(indices), indices, GL_STATIC_DRAW);glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 3 * sizeof(GLfloat), (GLvoid*)0);glEnableVertexAttribArray(0);glBindBuffer(GL_ARRAY_BUFFER, 0);// Note that this is allowed, the call to glVertexAttribPointer registered VBO as thecurrently bound vertex buffer object so afterwards we can safely unbindglBindVertexArray(0);// Unbind VAO (it's always a good thing to unbind any buffer/array to prevent strange bugs), remember: do NOT unbind the EBO, keep it bound to this VAO(3)编写顶点着色器、片段着色器代码。
const GLchar* vertexShaderSource = "#version 330 core\n""layout (location = 0) in vec3 position;\n""void main()\n""{\n""gl_Position = vec4(position.x, position.y, position.z, 1.0);\n""}\0";const GLchar* fragmentShaderSource = "#version 330 core\n""out vec4 color;\n""void main()\n""{\n""color = vec4(1.0f, 0.5f, 0.2f, 1.0f);\n""}\n\0";(4)加载着色器代码,进行代码的编译和链接形成着色器程序// Build and compile our shader program// Vertex shaderGLuint vertexShader = glCreateShader(GL_VERTEX_SHADER);glShaderSource(vertexShader, 1, &vertexShaderSource, NULL);glCompileShader(vertexShader);// Check for compile time errorsGLint success;GLchar infoLog[512];glGetShaderiv(vertexShader, GL_COMPILE_STATUS, &success);if (!success){glGetShaderInfoLog(vertexShader, 512, NULL, infoLog);std::cout << "ERROR::SHADER::VERTEX::COMPILATION_FAILED\n" << infoLog << std::endl;}// Fragment shaderGLuint fragmentShader = glCreateShader(GL_FRAGMENT_SHADER);glShaderSource(fragmentShader, 1, &fragmentShaderSource, NULL);glCompileShader(fragmentShader);// Check for compile time errorsglGetShaderiv(fragmentShader, GL_COMPILE_STATUS, &success);if (!success){glGetShaderInfoLog(fragmentShader, 512, NULL, infoLog);std::cout << "ERROR::SHADER::FRAGMENT::COMPILATION_FAILED\n" << infoLog << std::endl;}// Link shadersGLuint shaderProgram = glCreateProgram();glAttachShader(shaderProgram, vertexShader);glAttachShader(shaderProgram, fragmentShader);glLinkProgram(shaderProgram);// Check for linking errorsglGetProgramiv(shaderProgram, GL_LINK_STATUS, &success);if (!success) {glGetProgramInfoLog(shaderProgram, 512, NULL, infoLog);std::cout << "ERROR::SHADER::PROGRAM::LINKING_FAILED\n" << infoLog << std::endl;}glDeleteShader(vertexShader);glDeleteShader(fragmentShader);(5)采用核心模式绘制 OpenGL 几何图元loadShader();setupRC();while (!glfwWindowShouldClose(window)) {processInput(window);glClearColor(0.2f, 0.3f, 0.3f, 1.0f);glClear(GL_COLOR_BUFFER_BIT);glUseProgram(shaderProgram);glBindVertexArray(VAO);//glDrawArrays(GL_TRIANGLES, 0, 6);glDrawElements(GL_TRIANGLES, 6, GL_UNSIGNED_INT, 0);glfwSwapBuffers(window);glfwPollEvents();}(6)定义着色器类。
#ifndef SHADER_H#define SHADER_H#include <glad/glad.h>class Shader{public:Shader(const GLchar* vertexPath, const GLchar* fragmentPath);void use();GLuint program;};#endif3.编译运行五、实验结果(1)目录结构(2)实验结果六、实验体会1.本次实验是学习OPenGL的着色器编程,通过实验我对VAO、VBO、EBO这些看上去相近的东西有了更深的了解,熟悉了他们的用途,并且知道它们的作用和绑定方法。
也深刻体会到了核心模式和立即模式的区别。
2.在实验过程中,比较难理解的是VAO,VBO的绑定顺序,而且要特别心细。
前两次没有成功就是因为把VAO和VBO的顺序写反了。