安川变频器学习笔记
- 格式:docx
- 大小:8.20 MB
- 文档页数:7
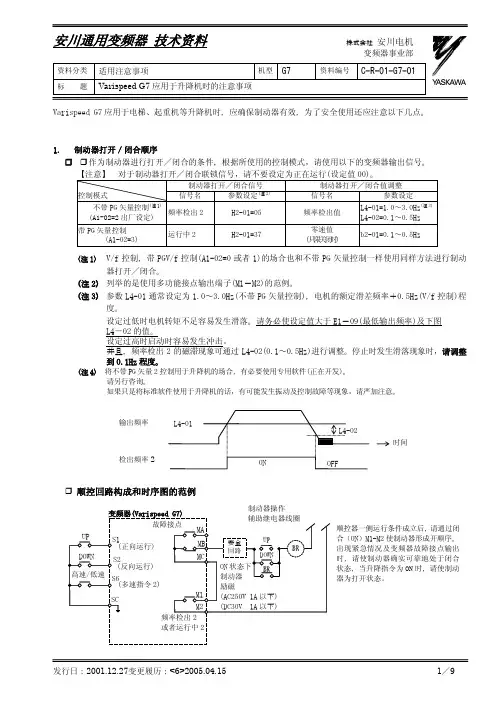
安川变频器1. 概述安川变频器是一种电力转换装置,用于控制电机的旋转速度。
它通过调节输入电压和频率,将电网的交流电转换为适合电机的直流电。
安川变频器在工业领域广泛应用,可以提供精确的电机控制和能耗优化。
2. 原理安川变频器的工作原理基于PWM(脉宽调制)技术。
当输入电压和频率发生变化时,变频器能够通过控制电压和频率的占空比来调整电机的速度。
其基本原理如下:1.输入电压转换:变频器将输入的交流电转换为电机所需的直流电。
通过整流、滤波和逆变等电路实现。
2.PWM控制:变频器通过改变电压和频率的占空比来实现对电机速度的控制。
占空比越高,电机转速越快。
3.控制系统:变频器配备了一个控制系统,可以根据需要进行电机速度的调整。
用户可以通过控制面板或远程接口来实现对变频器的控制。
3. 特点安川变频器具有以下特点:•高效节能:通过对电机的精确控制,可以最大程度地减少能耗。
•稳定可靠:安川变频器采用先进的控制算法和保护机制,确保系统的稳定运行。
•多功能性:变频器支持多种控制模式,如恒压控制、恒流控制和恒功率控制等。
•可编程性:通过程序控制,可以实现灵活的速度调整和工艺优化。
•易维护性:变频器具有良好的故障诊断和报警功能,便于维护和保养。
4. 应用领域安川变频器广泛应用于以下领域:4.1 工业生产•自动化设备:变频器常用于控制工业生产中的各种自动化设备,如输送带、机械臂和卷绕机等。
•加工设备:变频器可以为加工设备,如数控机床和喷涂机提供精确的电机控制。
•流体控制:变频器在泵、风机和压缩机等流体控制系统中的应用广泛。
4.2 建筑楼宇•电梯:变频器可以通过精确的速度控制来提高电梯的运行效率和乘坐舒适度。
•空调系统:变频器可以根据室内的温度需求来调整空调系统中风机和压缩机的运行速度。
4.3 交通运输•磁悬浮列车:变频器在磁悬浮列车的牵引系统中起到了至关重要的作用。
•地铁系统:变频器也广泛应用于地铁系统中的电机控制。
5. 总结安川变频器是一种用于电机速度控制的设备,具有高效节能、稳定可靠和多功能性等特点。
安川变频器操作范文一、参数设置在使用安川变频器之前,首先需要对其进行参数设置,以满足实际应用的需求。
1.输入和输出参数设置:包括输入电压、输入频率、输出频率、输出电流等参数。
用户需要根据电机的额定电压和额定频率来设置这些参数。
2.控制参数设置:包括控制方式、控制命令、速度反馈、过载保护、启动和停止方式等。
用户需要根据具体应用的要求来设置这些参数。
二、运行控制1.启动:将变频器输入电源接通后,首先按下启动按钮或者给控制信号,变频器开始工作,输出设定的频率和电压,电机开始运行。
2.停止:按下停止按钮或者给控制信号,变频器停止输出频率和电压,电机停止运行。
3.转速控制:通过设置变频器的输出频率来控制电机的转速。
可以通过上下键、运行命令输入和外部模拟输入等方式来调整输出频率,在合适的转速下获得所需的工作效果。
三、故障诊断四、安川变频器的使用注意事项1.变频器的安装位置应远离高温、潮湿和腐蚀性气体的环境,以防影响其正常工作。
2.在操作变频器之前,应先确保电源已接好,并检查接线是否正确。
变频器的输入和输出端子要与电机、电源和控制设备正确连接。
3.在进行参数设置时,要仔细阅读变频器的使用说明书,确保参数设置正确。
参数设置不当会导致电机无法正常运行,甚至损坏电机和变频器。
4.在使用变频器过程中,要定期检查电机和变频器的工作状态,及时清理电机和变频器的灰尘和杂质,确保散热良好,以避免过热和损坏。
总结:安川变频器是一种重要的电气设备,在工业生产中有着广泛的应用。
正确的操作方法和注意事项能够保证变频器的正常工作,提高生产效率。
因此在使用安川变频器时,需要了解其参数设置、运行控制和故障诊断等方面的知识,并按照要求进行操作。
安川L1000A變頻器PM電機自學習重點2012/4/17 允成機電廠內主機規格:1.92KW 5.3A 16P 60 r/min PG=2048變頻器規格:3.7KW步驟1:先讓變頻器通電啟動,將輸入接觸器與輸出接觸器電路吸合,步驟2:將變頻器A1-02=7步驟3:將變頻器設置為自學習模式’’ATUN’’步驟4:依L1000A手冊 P56頁,表24 PM 電機用自學習的輸入數據填入A1-02=7T2-04=______T2-05=______T2-06=______T2-07=______T2-08=______T2-09=______T2-16=______步驟5:請確認主機為無負載步驟6:將變頻器 T2-01設為0 ,输入主机参数T2-04=______T2-05=______T2-06=______T2-07=______T2-08=______T2-09=______T2-16=______按上鍵頭,直到自學習畫面開始,按’’RUN’’ ,至顯示END後此步驟完成步驟7: 將變頻器 T2-01設為1(PM電機停止型自學習),输入主机参数T2-04=______T2-05=______T2-06=______T2-07=______T2-08=______T2-09=______T2-16=______按上鍵頭,直到自學習畫面開始,按’’RUN’’,馬達會發出響聲,此為正常現象, 至顯示END後此步驟完成步驟8: 將變頻器 T2-01設為3 (初次磁極檢測參數自學習), 按上鍵頭,直到自學習畫面開始,按’’RUN’’,馬達會發出響聲,此為正常現象, 至顯示END後此步驟完成步驟9: 將變頻器 T2-01設為4(編碼器原點補償的停止自學習), 按上鍵頭,直到自學習畫面開始,按’’RUN’’,馬達會發出響聲,此為正常現象, 至顯示END後此步驟完成步驟10:將變頻器 T2-01設為11(旋轉型感應電壓參數自學習), 按上鍵頭,直到自學習畫面開始,請將抱閘接觸器吸合,並確認主機抱閘已打開, 按’’RUN’’,此時主機會轉動, 至顯示END後將抱閘釋放,此時觀看E5-11=_____PG原點脈衝補償量值, 此旋轉型感應電壓參數自學習須做3次, 每次旋轉自學習記錄E5-11值,3次值最大誤差不可超過±5內自鍵盤試運轉步驟1: 先將b1-01及b1-02設為0,此為鍵盤操作運行模式步驟2: 將鍵盤速度指令設5% ,按’’RUN’’並將速度指令逐步增加,若在增加過程中抱故障dv6,請先將s6-10為3.5或4.5,然後再試運行步驟3:將鍵盤速度指令設至95%(達到額定速度)運轉, 若在增加過程中抱故障dev,請將F1-10調大。
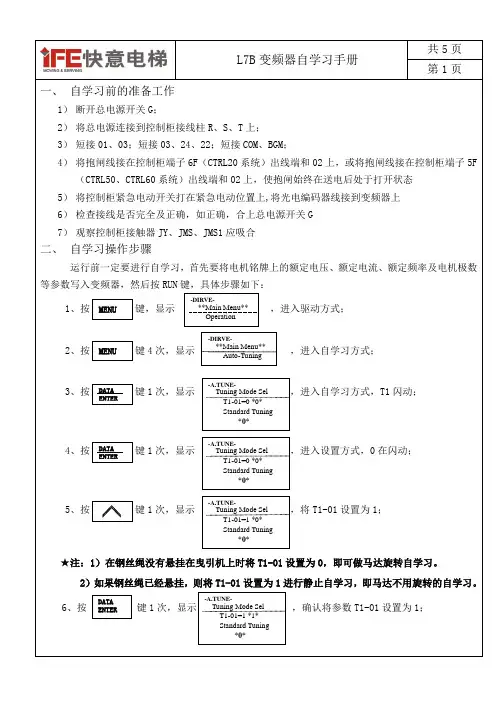
一、 自学习前的准备工作1) 断开总电源开关G ;2) 将总电源连接到控制柜接线柱R 、S 、T 上; 3) 短接01、03;短接03、24、22;短接COM 、BGM ;4) 将抱闸线接在控制柜端子6F (CTRL20系统)出线端和02上,或将抱闸线接在控制柜端子5F(CTRL50、CTRL60系统)出线端和02上,使抱闸始终在送电后处于打开状态 5) 将控制柜紧急电动开关打在紧急电动位置上,将光电编码器线接到变频器上 6) 检查接线是否完全及正确,如正确,合上总电源开关G 7) 观察控制柜接触器JY 、JMS 、JMS1应吸合二、 自学习操作步骤运行前一定要进行自学习,首先要将电机铭牌上的额定电压、额定电流、额定频率及电机极数等参数写入变频器,然后按RUN 键,具体步骤如下:1、按 键,显示 ,进入驱动方式;2、按 键4次,显示 ,进入自学习方式;3、按 键1次,显示 ,进入自学习方式,T1闪动;4、按 键1次,显示 ,进入设置方式,0在闪动;5、按 键1次,显示 ,将T1-01设置为1;★注:1)在钢丝绳没有悬挂在曳引机上时将T1-01设置为0,即可做马达旋转自学习。
2)如果钢丝绳已经悬挂,则将T1-01设置为1进行静止自学习,即马达不用旋转的自学习。
6、按 键1次,显示 ,确认将参数T1-01设置为1;MENU -DIRVE-**Main Menu** OperationMENU -DIRVE- **Main Menu**Auto-TuningDATA ENTER-A.TUNE-Tuning Mode Sel T1-01=0 *0* Standard Tuning*0*DATAENTER-A.TUNE- Tuning Mode Sel T1-01=0 *0*Standard Tuning*0*-A.TUNE-Tuning Mode Sel T1-01=1 *0*Standard Tuning*0*DATAENTER-A.TUNE-Tuning Mode Sel T1-01=1 *1*Standard Tuning*0*7、按 键1次,显示 ,设置额定马达功率,02闪动;8、按 键1次,显示 ,7.5kw 闪动;9、按 、 、 键, 将铭牌上的额定马达功率写入T1-0210、按 键1次,显示 ,确认修改参数T1-02;11、按 键1次,显示 ,设置马达电压,03闪动;12、按 键1次,显示 ,380.0闪动;13、按 、 、 键, 将马达铭牌上的额定电压写入T1-03;14、按 键1次,显示 ,确认修改参数T1-03;15、按 键1次,显示 ,设置马达额定电流,04闪动;16、按 键1次,显示 ,17.0闪动;-A.TUNE-Mtr Rated Power T1-02=7.5kw(0.0~650.00*15.00kw*DATAENTER-A.TUNE-Mtr Rated Power T1-02=7.5kw (0.0~650.00*15.00kw*RRESEDATAENTER-A.TUNEMtr Rated PowerT1-02=7.5kw(0.0~650.00*15.00kw*-A.TUNE-Rated Voltage T1-03=380.0V AC(0.0~510.0)*0.0V AC*DATAENTER-A.TUNE-Rated Voltage T1-03=380.0V AC (0.0~510.0)*0.0V AC*RESETDATAENTER-A.TUNE-Rated VoltageT1-03=380.0V AC (0.0~510.0)*0.0V AC*-A.TUNE-Rated Current T1-04=17.0A(3.4~68.0)*25.6A*DATAENTER-A.TUNE-Rated Current T1-04=17.0A (3.4~68.0)*25.6V AC*17、按 、 、 键, 将马达铭牌上的额定电流写入T1-04;18、按 键1次,显示 ,确认修改参数T1-04;19、按 键1次,显示 ,设置马达额定频率,05闪动;20、按 键1次,显示 ,50.0闪动;21、按 、 、 键, 将马达铭牌上的额定频率写入T1-05;22、按 键1次,显示 ,确认修改参数T1-05;23、按 键1次,显示,设置马达极数,06闪动;24、按 键1次,显示 ,6闪动;25、按 、 、 键, 将马达铭牌上的极数写入T1-06;26、按 键1次,显示 ,确认修改参数T1-06;RESETDATAENTER-A.TUNE-Rated CurrentT1-04=17.0A (3.4~68.0)*25.6V AC*-A.TUNE-Rated Frequency T1-05=50.0HzDATAENTER-A.TUNE-Rated FrequencyT1-05=50.0HzRESETDATAENTER-A.TUNE-Rated FrequencyT1-05=50.0Hz-A.TUNE-Number of Poles T1-06=6(2~48.0)DATAENTERRESETDATAENTER-A.TUNE-Number of Poles T1-06=6 (2~48.0)-A.TUNE-Number of PolesT1-06=6 (2~48.0)★注:通常我们使用的电机的铭牌上都有马达极数,一般情况下,当马达的转速在1000RPM 以上时,它的机数为4,当马达的转速为1000RPM 以下时,它的机数为6极,请按照马达铭牌上的极数设定;目前我公司使用的35Hz 马达极数为4,在自学习时注意应将T1-06设置为4。
安川变频器调试参数积累1. 频率限制(Freq Lim):在变频器中,频率限制是指设定电机的最大输出频率。
调试时,可以根据设备自身的负载特性来设置合适的频率限制值。
如果负载较大,可以适当降低频率限制,以避免负载过大导致设备过载。
2. 转速控制模式(Speed Ctrl Mode):安川变频器通常拥有多种转速控制模式,如PID控制、开环控制等。
调试时,可以根据实际应用需求选择合适的控制模式,并设置相应的调试参数。
通常情况下,PID控制模式能够更好地实现稳定的转速控制。
3. 加速度时间(Accel Time)和减速度时间(Decel Time):加减速时间是指电机从静止状态加速到设定转速或减速到静止状态所需要的时间。
在调试中,可以通过逐步调整加减速时间来找到合适的加减速过程,以保证电机能够在设定的时间内平稳达到目标速度或停止。
4. 力矩提升(Torque Boost):力矩提升是一种用于增强电机启动力矩的功能,在特定的应用场合下可以提高动力输出效果。
调试时,可以通过调整力矩提升的值来实现启动时的额外力矩输出。
5. 过载保护(Overload Protection):过载保护是指在电机超过额定负载时,变频器自动停止电机工作以保护设备的功能。
调试时,可以根据负载情况设置合适的过载保护参数,以避免设备过载损坏。
6. 故障诊断(Fault Diagnosis):变频器通常具有故障自诊断功能,能够通过故障代码和提示信息来快速定位故障原因。
在调试中,可以根据故障信息进行故障排查,并根据需要进行相应的参数调整。
7. IGBT温度保护(IGBT Temp Protection):IGBT是变频器中常见的关键部件,其温度过高会影响设备的整体性能。
调试时,可以根据实际应用负载和环境温度设置合适的IGBT温度保护参数,以防止设备过热。
8. 低速力矩增益(Low Speed Torque Gain):低速力矩增益是指在低转速运行时提升电机输出力矩的功能。
安川伺服∑∨学习笔记 HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】安川伺服∑-∨学习笔记一.面板操作1.up、down同时按下使伺服报警复位二.功能选择型参数表示方法1.Pn000.1参数Pn000的第1位数值(从左到右为:第0.1.2.3位)三.刹车使用方法1.使用27、28号输出端子为刹车输出2.设定输出信号的分配:首先设定27、28上的旋转捡出信号为无效,然后分配制动器信号到27、28号端子上3.设置参数Pn50E、Pn50F(如下图)4.制动器指令---伺服off延时时间Pn5060~50ms5.伺服电机旋转时的制动器动作条件(下面任意一个)a.电机进入非通电状态后,伺服电机转速低于Pn507的设定值时;b.电机进入非通电状态后,经过了Pn508的设定时间时。
注意:请勿将电机旋转捡出信号(/TGON)和制动器信号(/BK)分配在同一个端子上。
若分配于同一个端子,因垂直轴的下落的速度,会使/TGON信号ON,制动器可能会不动作。
四.再生电阻使用1.再生电阻连接在B1-B2之间,同时去掉B2-B3之间的连线2.修改参数:Pn600设定单位为:10w,20w设为2,0为使用内置再生电阻五.基本参数设定1.Pn000.11位置控制B位置控制带脉冲指令禁止功能(使用/P-con端口)(三轴伺服使用)2.Pn000.00正转、1反转电机旋转方向选择3.伺服ON使用a.使用输入信号/s-onCN1-40Pn50A.10低电平有效b.伺服on始终有效Pn50A.174.选择使用/不使用超程放止功能Pn50A.38始终允许正转Pn50B.08始终允许反转5.主回路电源欠电压时的转距限制功能Pn008.10不检出主回路欠电压警告。
(出厂设定)六.位置控制的基本参数设定1.Pn000.1控制方式的选择(参考上图)2.Pn200设定指令脉冲形态、清除信号形态、清除动作、滤波器选择(如下图)3.电子齿轮的设定a.13位增量型编码器8192b.七.调整1.八.功能应用设置1.JOG运行(Fn002)2.参数的写入禁止设定3.参数设置的初始化(恢复出厂设定)参数设定(塑机机械手应用-位置控制)Pn000---n0010(旋转方向/控制方式(位置控制模式))Pn00B---n0100(电源输入使用单相---750W)Pn170---n1401(免调整设定)Pn200---n0000(位置控制指令形态选择开关---符合+脉冲正逻辑)Pn20E---(电子齿轮分子)Pn210---(电子齿轮分母)Pn506---(制动器指令---伺服off延时时间)Pn508---(伺服off---制动器指令等待时间)Pn50A---n8070(设定伺服ON信号固定有效,设置P-OT固定为正转侧可驱动) Pn50B---n6548(设定固定为反转侧可驱动)Pn50E---n0001(设定CN-125/26号输出端口为定位完成信号输出口)Pn50F---n0200(设定CN-1 27/28号输出端口为制动器指令输出口)Pn600---(再生电阻设定以10W为电位如:100W设为10,“0”为使用伺服驱动器内置再生电阻)。
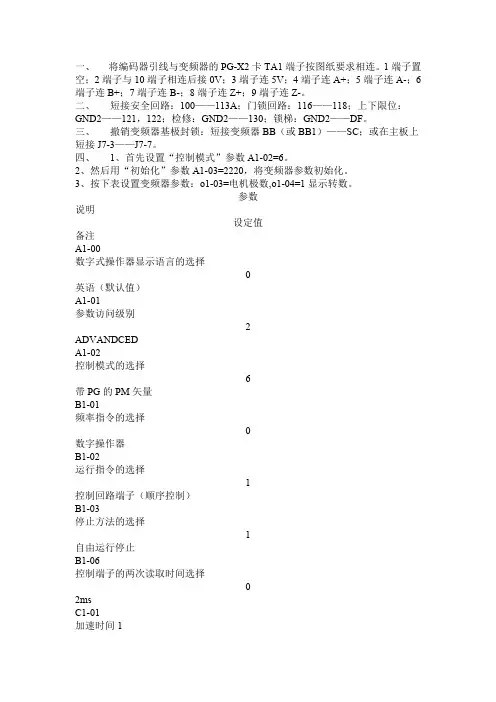
一、将编码器引线与变频器的PG-X2卡TA1端子按图纸要求相连。
1端子置空;2端子与10端子相连后接0V;3端子连5V;4端子连A+;5端子连A-;6端子连B+;7端子连B-;8端子连Z+;9端子连Z-。
二、短接安全回路:100——113A;门锁回路:116——118;上下限位:GND2——121,122;检修:GND2——130;锁梯:GND2——DF。
三、撤销变频器基极封锁:短接变频器BB(或BB1)——SC;或在主板上短接J7-3——J7-7。
四、1、首先设置“控制模式”参数A1-02=6。
2、然后用“初始化”参数A1-03=2220,将变频器参数初始化。
3、按下表设置变频器参数:o1-03=电机极数,o1-04=1显示转数。
参数说明设定值备注A1-00数字式操作器显示语言的选择英语(默认值)A1-01参数访问级别2ADVANDCEDA1-02控制模式的选择6带PG的PM矢量B1-01频率指令的选择数字操作器B1-02运行指令的选择1控制回路端子(顺序控制)B1-03停止方法的选择1自由运行停止B1-06控制端子的两次读取时间选择2msC1-01加速时间12以秒为单位设定从最高输出频率的0%到100%的加速时间C1-02减速时间12(1.5)以秒为单位设定从最高输出频率的100%到0%的减速时间C1-08减速时间43~5低于C1-11频率下的减速时间C1-11加减速时间的切换频率10%与d1-04设置一致C2-01加速开始时的S字特性时间0.7 C2-02加速完了时的S字特性时间0.7 C2-03减速开始时的S字特性时间0.7 C2-04减速完了时的S字特性时间0.7 C5-01ASR比例增益110C5-02ASR积分时间10.35 C6-11载波频率的选择4D1-02频率指令230自学习速度(根据实际需要设定)D1-03频率指令315~25检修运行速度(根据实际需要设定)D1-04频率指令46~10爬行速度(根据实际需要设定)D1-05频率指令5*低速(V1)(根据实际需要设定)D1-06频率指令6*中速1(V2)(根据实际需要设定)D1-07频率指令7*中速2(V3)(根据实际需要设定)D1-08频率指令8*高速(V4)(根据实际需要设定)E1-01变频器输入电压380以V为单位E1-04最高输出频率/转数*该参数与E1-06相同E1-05最大电压*按电机铭牌设置E1-06基本频率/转数*按电机铭牌设置E1-09最小输出频率/转数0 E5-02电机额定容量*按电机铭牌设置,注意单位E5-03电机额定电流*按电机铭牌设置,注意单位E5-04电机极数*按电机铭牌设置E5-05电机电枢电阻*按电机自学习结果设置E5-06电机的d轴电感*按电机自学习结果设置E5-07电机的q轴电感*按电机自学习结果设置E5-09电机的感应电压参数*按电机自学习结果设置E5-11PG原点脉冲的补正量*按电机自学习结果设置F1-01PG参数*按实际安装的编码器设置F1-02PG断线检出动作选择1F1-03过速度发生时动作选择0按C1-02时间减速停止F1-04速度偏差(DEV)时动作选择0按C1-02时间减速停止F1-08过速度(OS)检出值105 F1-09过速度(OS)检出时间1.0 F1-10速度偏差过大(DEV)检出值30 F1-11速度偏差大(DEV)检出时间1.0 H1-01选择端子S3的功能24多功能接点输入1H1-02选择端子S4的功能14多功能接点输入2H1-03选择端子S5的功能3多功能接点输入3H1-04选择端子S6的功能4多功能接点输入4H1-05选择端子S7的功能5多功能接点输入5H2-01选择端子M1-M2的功能37H3-15端子A1功能选择1力矩补偿H3-16端子A1输入增益120%左右根据现场整定设置,2倍S1-24的绝对值H3-17端子A1输入偏置L3-04减速中失速防止功能选择L8-07输出侧欠相保护的选择1O1-01驱动模式显示项目选择5选择在驱动模式下需显示的监视项目编号O1-02电源ON时监视显示项目选择1设定监视频率指令O1-03频率指令设定/显示的单位选择*按电机极数设置O1-04频率指令相关参数的设定单位1显示转数S1-20零伺服增益*根据现场整定设置S1-24上行过程中转矩补偿偏置-60%左右根据现场整定设置S1-25下行过程中转矩补偿偏置-60%左右根据现场整定设置五、先进行原点自学习,正确设定电机参数于T2参数栏后,将T1-01设为4。
安川IP变频器做电机自学习步骤(更换编码器):列:电机电压380V,电流23A,频率33.4 Hz,转速167 r/min1.输入检查参数:E3-01=1,E3-03=380,E3-04=23,E3-05=24,E3-06=167,E3-07=167,E3-09=0.375,E3-10=7.2,E3-11=15.82,E3-18=(编码器原点位置),E3-23=0.39,E3-24=1.07;F1-01=8192,F1-02=0;S1-10=-42,S1-11=-60;2.吊轿厢,卸钢丝绳;3.控制柜上,使KCD1、KCD2、KCB、KZB、KCM2、KCM3吸合;4.进入H1-01菜单,把“09”改为“08”,意思为基极封锁,再进入变频器U1-05菜单,此时抱闸已张开,手动盘动曳引轮电梯上方向运行,变频器显示为正数值,手动盘动曳引轮下方向运行,变频器显示为负数值,如显示相反,更改F1-02数值,0或1;5.找到并进入变频器自学习菜单T1-01,由0改为2(全项目自学习,包括电流和编码器位置),按确定键“ENTRE”,再按运行键“RUN”,电机会有慢速到额定速度运行一次,此过程大概持续一分钟左右,待显示“END”时,按确定键,查看E3-18值并记录,继续做一遍全项目自学习(T1-01改2),完成后在查看E3-18值,两遍的值相差不大于“3”,如差值大,还应继续做自学习,直到在范围内。
6.恢复H1-01为“09”,控制柜内检修开电梯,查看电梯是否达到检修速度,是否可以稳定运行,如正常挂上钢丝绳,再检修开电梯,查看是否可以正常运行。
如一切正常,完成慢车调试。
备注:更换变频器控制回路主板时,只需记录E3群、和F1-01、F1-02、S1-10、S1-11参数就可,本台电梯只可使用本台电梯参数,特别是E3-18。
安川L7B变频器做电机自学习步骤:a.对应主机铭牌参数设置以下变频器参数:E1-04最高输出频率/转速、E1-06基本频率/转速、E1-13基本电压、E5-02电机额定容量、E5-03电机的额定电流、E5-04电机的极数,手动短接变频器端子“BB”和“SC”;b.在KCS、KCD、KCD2吸合的情况下,用人工的方式将KCB、(KZB)、KCM2、KCM3短接使抱闸打开,手动盘车确认抱闸打开;c.翻到电机速度参数U1-05,手动盘车,确认轿厢往方向为正速度输出,轿厢往下方向运行为负速度输出;相反则调整F1-05=0\1。
安川L1000A变频器自学习方法PM电机配安川 L1000A 变频器自学习方法静止自学习1. 将 KAS、 KAD、 KMC、KMY接触器通电吸合,可采用短接的方法。
KMB接触器不必吸合。
2.静止自学习a) 修改变频器控制方式参数A1-02=7( 带 PG矢量控制 )N8-35=2( 脉冲方式 )b) 进入电机自学习 T 参数,将 T2-01 = 1(静止形自学习)c) 设定电机参数T2-04= 电机功率T2-05= 电机额定电压T2-06= 电机额定电流T2-08= 电机极数T2-09= 电机额定转速T2-16= 电机旋转一圈 PG脉冲数d) 按 RUN键开始自学习(整个过程大约 2 分钟)3. 初次磁极检测参数自学习a) 将 T2-01 = 3(初次磁极检测参数自学习)。
b) 按 RUN键开始自学习(整个过程大约 1 分钟)4. 电梯角度自学习a) 将 T2-01 = 4(电梯角度自学习)。
b) 按 RUN键开始自学习(整个过程大约 2 分钟)5. 试运转电机。
将电机以 10%, 20%,50%,100% 的速度运行,观察运行是否有异常振动或都响声。
(第一次运行须保证主机旋转五圈以上)6. 监视磁极位置检出值断电(操作器显示消失),上电运行,观察是否能顺利启动。
观察 U6-13 是否有值,若无值则须重复以上自学习步骤。
7. 观察运行方向观察电机的运转方向,是否与实际的运转方向一致,如相反,则将电机和变频器间的接线 V、 W进行互换;将F1-05 变更(从 0 变到 1 或从 1变到 0);将 E5-11 的值取反。
将主板上的 A+与 B+, A- 与 B- 进行互换。
8. 拆线将所有短接线拆除,恢复原来的状态。
安川G7变频器
一.调试:
带PG卡:A1-02(控制模式选择)
=1或3(带PG卡控制)
改为0(无PG卡,V/F控制)
(拔掉PG卡后更改控制方式参数)
更改控制方式后经常出现的报警:H1-06(端子S8 的功能选择与设定)改为F(屏蔽该该端子功能)。
H3-05(多功能模拟量输入端子A3功能选择与设定)改为1F(屏蔽该该端子功能)。
CPF06
(选择卡连接故障)。
更改完报警参数后断电重启,如果依然有报警,则上传参数恢复出厂设置。
参数拷贝功能:
o3-01=0 :正常动作
1 :READ (变频器→操作面板)
2 :COPY (操作面板→变频器)
当参数不允许读取时应更改参数:
o3-02=0 :禁止READ
改为 1 :允许READ(允许读取参数)
恢复出厂设置:
A1-03 = 2220(初始化)
二.变频器常见问题
1: 通电后指示灯亮,操作面板无显示。
此情况多数为管理显示的3844电源芯片旁边EA(六脚场效应管,印字为EA)坏。
更换EA,3844芯片周围贴片电阻也应仔细检查。
2:通电运行无输出。
多数情况是为驱动电路供电的3844芯片旁EA场效应管坏,更换EA后,检查3844供电脚电压是否为12V,各路驱动静态电压是否同。
3:注意驱动板接线。
安川变频器学习笔记
一、结构
1、触发器
2、PG卡通讯板主控板电源端子板数字操作器
PG卡:把测速编码器的信号转化为驱动器可识别的信号.完成电机速
度信号的反馈.
通迅板:主要功能是进行驱动器与PLC的CPU之间通迅信号的转换.以便驱动器与PLC之间能进行信号传输.
主控板:主要进行驱动器各种信号的集中处理,储存驱动器的各种参数.
手操器:驱动器外部参数输入的操作面板和各种参数的显视面板.在驱动器出现故障时,显示故障代码和名称.
触发板:供给驱动器内部各线路板的工作电源和IGBT的触发极电源.
变频器工作原理
变频器主要有“整流”和“逆变”两部分。
变频器送电后2~3秒后电压上升到80%,INV内部的M接触
器吸合。
整流后的直流电压为:Vac=1.35X460V=760V.
吊具下降时,吊具处于发电状态,通过并联在IGBT旁的二极管桥式整流,使直流电压升高,再通过DBU消耗。
Master DBU作为检测,Master和Slave同时执行。
变频器只能消耗20%的反馈电压,80%需要通过DBR消耗。
二、数字操作器
驱动模式:是变频器可运行的模式。
进行频率指令、输出电流等的监视显示,故障内容显示、故障记录显示等。
QUICK程序模式:进行变频器运行最低限所必要的参数的参照、设定。
ADVANCED程序模式:进行变频器全部参数的参照、设定。
效验模式:进行与出场设定值不同的参数的读取设定。
自学习模式:用矢量控制模式运行不知道参数的电机时,自动计算、设定电机的参数。
也可只测定电机线间电阻。
三、变频器参数的构成
A:环境设定。
B:应用。
C:调整。
D:指令。
E:电机参数。
F:选择件。
H:选择端子功能。
L:保护功能。
N:特殊调整。
O:操作器关系。
T:电机的自学习。
U:监视。
A1-02(控制模式)。
选择“3”是带PG矢量控制。
A1-01(参数的存取等级)。
A1-04(密码)。
A1-05(设定密码)。
B1-01(选择频率指令)。
B1-02(选择运行指令)。
O2-01(本地/远程键的功能)。
O3-01(拷贝功能的选择)
一、变频器主回路中有有保险、IGBT、驱动板、PG卡。
IGBT(Insulated Gate Bipolar Transistor),绝缘栅双极型晶体管,
是由BJT(双极型三极管)和MOS(绝缘栅型场效应管)组成的复合全控
型电压驱动式功率半导体器件, 兼有MOSFET的高输入阻抗和GTR的
低导通压降两方面的优点。
GTR饱和压降低,载流密度大,但驱动电流较大;MOSFET驱动功率很小,开关速度快,但导通压降大,载流
密度小。
IGBT综合了以上两种器件的优点,驱动功率小而饱和压降低。
非常适合应用于直流电压为600V及以上的变流系统如交流电机、变频器、开关电源、照明电路、牵引传动等领域。
IGBT模块是由IGBT(绝缘栅双极型晶体管芯片)与FWD(续流二极
管芯片)通过特定的电路桥接封装而成的模块化半导体产品;封装后的IGBT模块直接应用于变频器、UPS不间断电源等设备上;
IGBT模块具有节能、安装维修方便、散热稳定等特点;当前市场上
销售的多为此类模块化产品,一般所说的IGBT也指IGBT模块;随着节能环保等理念的推进,此类产品在市场上将越来越多见;
IGBT是能源变换与传输的核心器件,俗称电力电子装置的“CPU”,
作为国家战略性新兴产业,在轨道交通、智能电网、航空航天、电动汽车与新能源装备等领域应用极广。
二、保险一般在外围线路对地短路,电机绕组间绝缘很低时会造成,直流母线因通过内部二极管形成环路对地或直流母线对输出之间短路。
如果在静态时发生电机绕组短路现象,则变频器在启动时有可靠保护,并将故障原因报出。
三、动态时,尤其在电机高速运转时发生上述短路现象,则变频器保
护IGBT的作用减少很多,因为信号处理需要时间,此时IGBT可能已经损坏。
四、IGBT的开关频率很高,动态响应很快,外围发生短路时电流冲击很大。
虽然变频器有完善的检测电路,但因受IGBT开关频率高的影响,控制回路送来的关断信号一般会有一段时间的延迟。
所以,IGBT 在动态电机高速时很难进行关断性保护。
五、驱动板与IGBT有电气连接,一旦IGBT发生短路,高压信号会通过G极和C极的短路引导驱动板上,损坏内部元件。
所以,IGBT损坏,驱动板同时更换。
六、控制回路易损件有:保险、控制变压器、风扇、接触器、吸收电阻等。
七、主控板内存储全部变频器的应用参数。
所以,更换前一定先下载备份。
八、如果主控板内部有两台电机的参数,校对时第二台电机的参数有部分不能显示出来,需要在程序中进行切换。
九、PG卡损坏一般是外部PG电源线接错造成。