华为直流PSM监控CDT规约
- 格式:doc
- 大小:149.50 KB
- 文档页数:21


循环式远动规约(CDT 规约)1循环式远动规约(CDT)1.主题内容与适用范围本标准规定了电网数据采集与监控系统中循环式远动规约的功能、帧结构、信息字结构和传输规则等。
本标准适用于点对点的远动通道结构及以循环字节同步方式传送远动设备与系统。
本标准还适用于调度所间以循环式远动规约转发实时信息的系统。
2.引用标准国家标准:《地区电网数据采集与监控系统通用技术条件》和《远动终端通用技术条件》。
3.一般技术要求3.1 本规约采用可变帧长度、多种帧类别循环传送、变位遥信优先传送,重要遥测量更新循环时间较短,区分循环量、随机量和插入量采用不同形式传送信息,以满足电网调度安全监控系统对远动信息的实时性和可靠性的要求。
3.2 本规约规定主站与子站间进行以下信息的传送:a.遥信b.遥测c.事件顺序记录(SOE)d.电能脉冲记数值e.遥控命令;f.设定命令;g.升降命令;h.对时;i.广播命令;j.复归命令;k.子站工作状态。
3.3 信息按其重要性不同的优先级和循环时间,以便实现国家标准《地区电网数据采集与监控系统通用技术条件》和《远动终端通用技术条件》所规定的要求和指标。
3.3.1 上行(子站至主站)信息的优先级排列顺序和传送时间要求如下:3.3.1.1 对时的子站时钟返回信息插入传送;3.3.1.2 变位遥信、子站工作状态变化信息插入传送,要求在1s 内送到主站3.3.1.3 遥控、升降命令的返送校核信息插入传送;3.3.1.4重要遥测安排在A帧传送,循环时间不大于3s;3.3.1.5次要遥测安排在B帧传送,循环时间一般不大于6s;3.3.1.6一般遥测安排在C帧传送,循环时间一般不大于20s;3.3.1.7遥信状态信息,包含子站工作状态信息,安排在D1帧定时传送,3.3.1.8电能脉冲计数值安排在D2帧定时传送;3.3.1.9事件顺序记录安排在E帧以帧插入方式传送。
3.3.2下行(主站至子站)命令的优先级排列如下.3.3.2.1召唤子站时钟,设臵子站时钟校正值,设臵子站时钟;3.3.2.2遥控选择、执行、撤消命令,升降选择、执行、撤消命令,设定命令;3.3.2.3广播命令;3.3.2.4复归命令.3.3.3D帧传送的遥信状态、电能脉冲计数值是慢变化量,以几分钟至几十分钟循环传送。
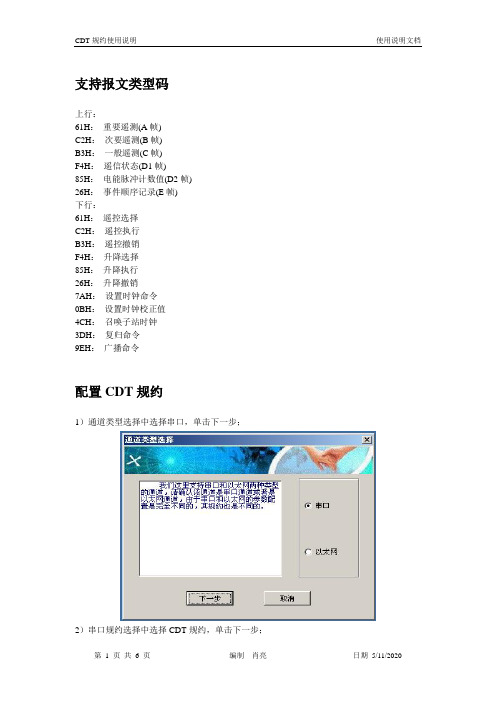
支持报文类型码上行:61H:重要遥测(A帧)C2H:次要遥测(B帧)B3H:一般遥测(C帧)F4H:遥信状态(D1帧)85H:电能脉冲计数值(D2帧)26H:事件顺序记录(E帧)下行:61H:遥控选择C2H:遥控执行B3H:遥控撤销F4H:升降选择85H:升降执行26H:升降撤销7AH:设置时钟命令0BH:设置时钟校正值4CH:召唤子站时钟3DH:复归命令9EH:广播命令配置CDT规约1)通道类型选择中选择串口,单击下一步;2)串口规约选择中选择CDT规约,单击下一步;3)串口参数设置中选择相应的参数,这些参数的设置是根据现场的传输参数来确定,配置完毕后单击下一步;4)高级配置中,是否使用该通道对计算机校时:是否允许该通道的主站对本台计算机校时,如果有GPS则本设置无效;校时基准年份:由于规约下传的时间只是一个十六进制数,因此必须加上这个基数年转换成现在的千年时间,这个时间一般由调度端指定,默认为2000;完成设置后单击下一步。
5)、设置CDT规约功能码默认选择为71,如果有特殊要求可以根据情况选择70;设置完成后单击下一步。
6)、CDT高级设置主站地址:发送报文中的目的站号,即主站的地址编号;子站地址:发送报文中的源站址,即本站在整个调度系统中的地址编号;帧间延时:发送一帧后停顿的时间间隔,一般为0;是否上送子站工作状态:一般此项不打勾;最大转发个数:一般采用默认设置;帧序列:提供32组组帧方式可自己排列帧发送顺序,第一帧一般设为D帧,如用户无特殊要求建议采用默认的帧发送序列;设置完毕单击下一步。
7)、完成再次确认您的设置,如果无错误,单击完成即可完成配置配置通道转发表1、在数据库中选择要转发的点1)、测量库:是否发送:如果打勾则该点转发上送,否则该点不上送;规约量程:对于CDT规约量程为2048;变比:用于将二次值转换为一次值的CT或PT变比;2)、遥信库:是否发送:如果打勾则该点转发上送,否则该点不上送;单双点:根据点表来确定;SOE:打勾则该点遥信变位触发一个SOE,否则不触发;3)、遥脉库:是否发送:如果打勾则该点转发上送,否则该点不上送;4)、遥控库:是否发送:如果打勾则该点转发上送,否则该点不上送;是否直控:如果该点为直控则打勾,否则为选控点(根据点表来设定)5)、SOE库:是否发送:如果打勾则该点转发上送,否则该点不上送;单双点:根据点表来确定。

1、深圳华为模块直流屏通讯规约:1.物理接口:提供RS232、RS485、RS422三种串行通讯方式(注:在RS485方式下,只支持遥测和遥信命令,不支持遥调和遥控命令)。
2.数据传输速率:600、1200、2400、4800、9600(缺省值)、19200、38400 (bps)3.接口参数:1位起始位,8位数据位,1位停止位,无校验位的异步串行通讯。
4.规约类型:本规约遵守中国电力行业标准(DL 451—91)循环式远动规约标准。
5.在上下行信息中,控制字=71H.(注:在本协议的下行信息中,控制字D位必须为1,否则直流屏将不会执行下行命令!!!)以上所述的上行信息和下信息中若同时S=0,D=0,则表示源站址和目的的站址无意义。
6.源站址和目的站址说明在上行信息中,源站址是直流屏地址,即PSM-A监控模块面板显示中的本机地址,其取值范围为1~254,目的站址固定为01。
在下行信息中,源站址是指后台主机的地址,目的站址必须是直流屏的地址,若目的地址不正确,则下行命令将不会执行!!!6.5、帧类别本协议定义的帧类别码及其含义见表2表2 帧类别代号定义表7.2、功能码定义本协议用到的功能码分配见表3。
表3 功能码分配表注:在重要遥测、次要遥测量、一般遥测量中,本协议重复定义了功能码(具体功能码定义请参见表4、表5和表6),解释时可通过这三种遥测量不同的帧类别码来予以区分。
****注:本规约的遥测功能码全部从0开始,不可以只根据功能码去判断数据的类型,只能根据帧类别和功能码的组合判断。
7.3 遥测信息字格式遥测信息字格式见图5。
70图5 遥测信息字格说明:(1)每个信息字传送两路遥测量;(2)b11~b0传送一路模拟量,以二进制码表示,b11=0时为正数,b11=1时为负数,以2的补码表示负数;(3)b14=1表示溢出,b15=1表示无效。
9 自定义部分说明: (1)在目前的工程中,采用的均为标准直流屏系统(1个充电柜、1个馈电柜、GZDW35接线方式);(2)在下面的遥测和遥信表格中,凡是后面注明字母Y的,表示要进行采集和显示. 9.1、重要遥测量重要遥测量帧类别码为0x61,控制字节为0x71,其功能码和信息字定义见表4。

PSM-A10监控模块远程通讯协议(电力部颁CDT-91标准)(版本号:1.0)1、概述本文描述了PSM-A10监控模块应用于直流屏时向上级监控设备提供的通讯协议(规约),通过本协议可以获取直流屏的各种运行参数,控制直流屏的运行方式,从而方便地实现四遥功能。
2、适用范围本文适用于艾默生网络能源有限公司的开发人员及测试人员,也适用于采用通讯方式接入我司直流屏设备的各自动化厂家。
3、引用标准本文遵守中华人民共和国电力行业标准(DL 451—91)循环式远动规约标准。
4、术语定义状态量:用于描述系统运行时的采集量,取值为有限的几个值,并不表示系统的故障情况。
在本协议中一般指交流当前工作路号、系统控制方式、电池充电状态、充电模块控制方式、充电模块开/关机状态等五个量,在本协议的遥信量中包括了此类量。
告警量:用于描述系统处于异常时的采集量,取值为0或1,当取值为1时表示系统有故障存在。
在本协议上送遥信量中的大部分都是此类量。
5、物理接口5.1、串行通讯口提供RS232、RS485、RS422三种串行通讯方式(注:在RS485方式下,只支持遥测和遥信命令,不支持遥调和遥控命令)。
5.2、数据传输速率提供600、1200、2400、4800、9600(缺省值)、19200、38400七种通讯波特率。
注:在NP9802、NP9802-A中,只提供1200、2400、4800、9600(缺省值)四种波特率。
5.3、字符格式采用无校验位、8位数据位、1位停止位的异步串行通讯格式。
6、帧6.1、帧结构帧结构如图1所示,每帧都以同步字开头,随后发送1个控制字和多个信息字,图1、帧结构6.2、同步字本协议的同步字按发送的先后顺序为:EB、90、EB、90、EB、90。
6.3、控制字控制字共有B7~B126个字节,其组成如图2所示。
6.3.1 控制字节说明(如图3所示):E:扩展位当E=0时使用表2已定义的帧类别码;当E=1时帧类别码可另行定义,以便扩展功能。
cdt规约解析-回复CDT(Contract Design Tool)规约解析是指对CDT规约进行详细解读和解析的过程。
CDT是一种基于区块链技术的智能合约规约,它允许开发者使用一套高级编程语言及开发工具创建和部署智能合约。
CDT规约解析的目的是帮助开发者理解CDT规约的各个方面,提供清晰的指南和示例,并解答可能遇到的问题。
第一步:理解CDT规约的基本概念和架构CDT规约是一个包含一组规则和规范的文件,用于定义智能合约的结构、属性和行为。
它可以被看作是一种“合约编程语言”,具有自己的语法和语义。
CDT规约是建立在区块链技术上的,它通过智能合约的方式实现了不需要第三方中介的可信交易。
CDT规约的架构通常由以下几个部分组成:1. 数据类型:CDT规约可以定义各种不同的数据类型,包括整型、字符串、数组等。
这些数据类型可以在智能合约中进行定义和使用。
2. 变量和函数:CDT规约允许开发者声明和使用变量,以及定义和调用函数。
变量可以用来存储智能合约中的状态信息,函数可以用来执行各种操作。
3. 条件逻辑和循环:CDT规约支持条件语句和循环语句,开发者可以使用它们来编写更复杂的智能合约逻辑。
4. 事件和触发器:CDT规约允许开发者定义和触发事件,这些事件可以在智能合约执行过程中被捕捉和处理。
触发器可以是外部事件(如用户输入)或内部事件(如合约状态改变)。
5. 安全性和权限:CDT规约提供了一些机制来确保智能合约的安全性和权限管理。
开发者可以定义权限控制规则,限制对合约的访问和操作。
第二步:详细解析CDT规约的语法和语义在第一步之后,我们需要仔细解析CDT规约的语法和语义。
这包括了对CDT规约中各个关键词、操作符和语句的解释和说明。
我们需要理解每个关键词、操作符和语句的作用和用法,并且了解它们之间的关系和限制。
在语法解析的过程中,我们需要注意以下几个方面:1. 语法结构:CDT规约是由多个语句构成的,每个语句由一行或多行组成。
CDT规约报文介绍远动规约的目的就是把子站的信息提供给远方的调度中心,目前常用的规约有:部颁CDT、IEC101、DNP、SC1801,104等.下面主要介绍CDT规约与大家交流. CDT 规约是以子站数据循环上送,同时重要的数据采用插桢的方式上送,其主动权在子站端.CDT的桢结构为:同步字+控制字+信息体同步字为: eb 90 eb 90 eb 90控制字为: XX XX(表示桢的类别如遥测,遥信等), XX(信息字数),源地址(子站地址),目的地址(主站地址),CRC信息体为:功能码, 数据码4个字节, 校验码CRC1:全YX控制字的桢类别为: 71 f4信息体的功能码为: f0—ff 每个功能码上送 32 个 YX 量,则部颁 CDT 的上送YX 容量为:32*16=512,f0上送组态里的1-32个遥信的状态,f1上送33-64个遥信的状态,以此类推.报文:eb 90 eb 90 eb 9071 f4 10 01 64 d4 (全YX)f0 00 00 00 00 f6 f1 00 60 38 1c 54 f2 00 00 00 02 3c f3 64 00 0000 5d f4 02 84 a5 c1 e5 f5 02 00 05 05 6d f6 05 05 00 01 34 f7 0505 05 05 0b f8 05 05 04 41 f5 f9 38 d0 00 20 5b fa 00 00 00 00 2b fb00 00 00 00 49 fc 00 00 00 00 60 fd 00 58 02 90 a4 fe 40 05 00 04 e3 ff 00 02 00 12 6e以f1 00 60 38 1c 54为例,f1上送33-64个遥信的状态.00表示33-40个遥信 0 (yx40)0 0 0 0 0 0 0 (yx33) 低位在前高在后!! (16进制转4位2进制)60表示41-48个遥信 0(yx48)110 0000(yx41) 则表示46和47个遥信的状态是合的2:全YC控制字的桢类别为: 71 61(我们在组态一般用的是重要遥测)信息体的功能码为: 00—7f 每个功能码上送二个遥测量,则部颁 CDT 的上送遥测容量为: 128*2=256, 00上送组态里的1-2个遥测量,以次类推.一路遥测由二个字节组成,根据规约定义: b15为数据有无效位 b14为数据有无溢出位,b13-b12未定义, b11为符号位, b10- b0为传输的量,则最大值为 0000 0111 1111 1111 为7ff即2047.报文:eb 90 eb 90 eb 9071 61 20 01 64 2d (上送重要遥测,功能码个数为32个,则上送了64个遥测量) 00 e5 03 e7 03 49 01 e7 03 00 00 26 02 c1 06 00 00 fa 03 00 00 00 0059 04 00 00 00 00 70 05 a9 06 00 00 36 06 97 00 98 00 c9 07 95 00 0000 ce 08 6f 0f cd 0f 0f 09 b7 09 87 00 99 0a 84 00 85 00 bc 0b 0000 d2 0f fd 0c f8 0f 6c 09 ab 0d 00 00 00 00 0b 0e 00 00 00 00 ad 0f 00 00 cb 06 a7 10 fe 0f 5d 03 a1 11 53 03 4b 03 11 12 4a 03 e4 00a4 13 cb 06 6e 06 07 14 d9 03 da 03 a5 15 dc 03 ab 06 25 16 0000 03 00 b9 17 00 00 ff 0f 1e 18 00 00 56 09 99 19 db 03 dc 03 03 1a dd 03 af 06 57 1b ab 03 15 00 ac 1c a9 03 69 02 f9 1d 74 00 8b06 60 1e 83 04 82 04 bf 1f 85 04 0e 00 ff以00 e5 03 e7 03 49为例,表示上送组态里的遥测1和2,其中e5 03表示遥测1, e7 03表示遥测2.上送的是源码值,要转换成实际值则要主站乘上相应的系数即可.设遥测1为400/5的IA,则系数为1.2*400/2047= 0.23448则IA=( hex 03 e5)* 0.23448=233.77656A03 e5=0000 0011 1110 0101=512+256+128+64+32+4+1=997997*0.23448=233.776563:上送SOE控制字的桢类别为: 71 26功能码为: 80 81报文:eb 90 eb 90 eb 9071 26 02 01 64 4180 85 02 23 38 f881 0a 15 ca 01 9c其中 80: 85 02 表示 02 85 即285ms 23 表示 23秒 38表示38分81: 0a 表示10点 15表示21号 ca 01 解释为 01 ca 转为二进制为: 0(状态位) 000 0001 1100 1010 (在组态的点号=458)则可以解释为: 组态里458点遥信在21号10点38分23秒285毫秒时状态变“分”4:YK过程YK过程为: 主站YK预选------收到YK返校后--------YK执行或YK撤销YK预选格式为:eb 90 eb 90 eb 9071 61 03 01 0b d9 (YK预选)e0 cc 1f cc 1f 2f (cc表示遥控合 1f表示遥控序号第31个遥控)e0 cc 1f cc 1f 2fe0 cc 1f cc 1f 2fYK返校格式为:e1 cc 1f cc 1f 4de1 cc 1f cc 1f 4de1 cc 1f cc 1f 4d遥控和升降命令的返校信息连续插送三遍, 且遥控和升降命令的返校信息连续插送三遍必须在同一帧内.。
PSM-A监控模块后台通讯协议(符合电力系统CDT标准)(版本号:1.1)1、概述本文描述了PSM-A监控模块应用于直流屏时向上级监控设备提供的通讯协议(规约),通过本协议可以获取直流屏的各种运行参数,控制直流屏的运行方式,从而方便地实现四遥功能。
2、适用范围本文适用于深圳华为电气公司的开发人员及测试人员,也适用于采用通讯方式接入我司直流屏设备的各自动化厂家。
3、引用标准本文遵守中华人民共和国电力行业标准(DL 451—91)循环式远动规约标准。
4、术语定义状态量:用于描述系统运行时的采集量,取值为有限的几个值,并不表示系统的故障情况。
在本协议中一般指交流当前工作路号、系统控制方式、电池充电状态、充电模块控制方式、充电模块开/关机状态等五个量,在本协议的遥信量中包括了此类量。
告警量:用于描述系统处于异常时的采集量,取值为0或1,当取值为1时表示系统有故障存在。
在本协议上送遥信量中的大部分都是此类量。
5、物理接口5.1、串行通讯口提供RS232、RS485、RS422三种串行通讯方式(注:在RS485方式下,只支持遥测和遥信命令,不支持遥调和遥控命令)。
5.2、数据传输速率提供600、1200、2400、4800、9600(缺省值)、19200、38400七种通讯波特率。
注:在NP9802、NP9802-A中,只提供1200、2400、4800、9600(缺省值)四种波特率。
5.3、字符格式采用无校验位、8位数据位、1位停止位的异步串行通讯格式。
6、帧6.1、帧结构帧结构如图1所示,每帧都以同步字开头,随后发送1个控制字和多个信息字,图1、帧结构6.2、同步字本协议的同步字按发送的先后顺序为:EB、90、EB、90、EB、90。
6.3、控制字控制字共有B7~B126个字节,其组成如图2所示。
6.3.1 控制字节说明(如图3所示):E:扩展位当E=0时使用表2已定义的帧类别码;当E=1时帧类别码可另行定义,以便扩展功能。
在本协议中,此位总是为0。
L:帧长定义位当L=0时表示本帧信息字数n为0,即本帧没有信息字;当L=1时表示本帧有信息字。
在本协议中,此位总是为1。
7b0图2 控制字组成图3 控制字节B7字节B8B9B10B11B12S:源站址定义位,D:目的站址定义位6.3.2 S与D在上行及下行信息中的定义说明:在上行信息中,S=1表示控制字中源站址有内容,源站址字节即代表信息始发站的站号,即直流屏的本机地址;D=1表示目的的站址字节有内容,目的站址字节代表主站站号。
在本协议的上行信息中,S位总是为1,D位总是为1。
在下行信息中,S=1表示源站址字节有内容,源站址字节代表主站站号;D=1表示目的站址字节有内容,即直流屏的本机地址。
在本协议的下行信息中,D位必须为1,否则直流屏将不会执行下行命令。
以上所述的上行信息和下信息中若同时S=0,D=0,则表示源站址和目的的站址无意义。
6.3.3 源站址和目的站址说明在上行信息中,源站址是直流屏地址,即PSM-A监控模块面板显示中的本机地址,其取值范围为1~254,目的站址固定为01。
在下行信息中,源站址是指后台主机的地址,目的站址必须是直流屏的地址,若目的地址不正确,则下行命令将不会执行。
6.4、校验码本协议采用CRC校验,校验多项式为G(X)=X8+X2+X+1,对每个控制字或信息字的前5个字节进行CRC校验,生成一个8位的余数,该余数取反后即可作为校验码尾随前5字节发送。
计算方法如下:将每个控制字或信息字中的前5个字节按从低到高的顺序排列,每个字节的位从高到低排列,构成一个位流,在这个位流的后面加上8个0,从而得到一个48位的位流。
例如,对某个信息字有B0-B5共6个字节,每个字节8位分别为bi7-bi0(i为字节序号,取值范围0~4),则按上面的方法得到的位序列为b07b06...b00,b17b16..b10,...,b47b47...b40,00000000,用校验多项式107H (X^8+X^2+X+1)作为除数去除这个码流,相除时不做减法而做异或,最后得到一个8位的余数,将这个8位的余数取反后或到48位的码流的尾部,即可得到一个带8位CRC校验码的48位序列。
例:有信息字包括如下5个字节43H,E8H,7DH,33H,56H,可得到一个码流01000011,11101000,01111101,00110011,01010110,00000000,用107H 除该码流,得到余数为2FH,取反后得以校验码D0H,因此最后发送的字节序列为43H,E8H,7DH,33H,56H,D0H共6个字节(计算程序可参见附录A)。
6.5、帧类别本协议定义的帧类别码及其含义见表26.6、信息字数信息字数n表示该帧中所含信息字数量,即信息字1至信息字n的总数,n=0表示无信息字。
6.7 帧系列及信息字传送规则6.7.1、对于遥测量,本协议按定时方式循环发送A帧(重要遥测)、B帧(次要遥测)、C帧(一般遥测)的内容,定时时长分别为:3秒、6秒、20秒。
6.7.2、对于遥信量,本协议按插入方式循环发送,即在A、B、C帧的发送时间间隙发送。
遥信信息字中不含子站工作状态信息,遥信变位时也不作处理。
6.7.3、对于遥控命令的返校信息,采用插入的方式进行发送。
7、信息字7.1、信息字结构每个信息字由B n~B n+56个字节构成:功能码1个字节,信息和数据码共4个字节,检验码1个字节,其通用格式如图4所示。
BnBn+1Bn+2Bn+3Bn+4Bn+5图4 信息字通用格式7.2、功能码定义本协议用到的功能码分配见表3。
注:在重要遥测、次要遥测量、一般遥测量中,本协议重复定义了功能码(具体功能码定义请参见表4、表5和表6),解释时可通过这三种遥测量不同的帧类别码来予以区分。
7.3 遥测信息字格式遥测信息字格式见图5。
图5 遥测信息字格说明:(1)每个信息字传送两路遥测量;(2)b11~b0传送一路模拟量,以二进制码表示,b11=0时为正数,b11=1时为负数,以2的补码表示负数;(3)b14=1表示溢出,b15=1表示无效。
7.4 遥信信息字格式图6 遥信信息字格式说明:(1)每个遥信字含32个状态位;(2)各状态位定义参见表7、表8、表9、表10。
8 命令格式8.1 遥控命令遥控过程及遥控帧结构如图7所示。
遥控命令控制字和控制字节格式见图8。
遥控过程的信息字格式见图9。
此三个信息字内容相同(b )图7 遥控过程及帧结构(a )遥控结构;(b )帧结构b0B 7字节B 8b 7 b 0 B 9 B 10 B 11 B 12(a) (b)图8 遥控命令和控制字格式 (a )控制字格式;(b )控制字节格式或撤消命令)(a )B n字节B n字节B n+1 B n+1B n+2 B n+2B n+3 B n+3B n+4 B n+4B n+5 B n+5B n字节B n字节B n+1 B n+1B n+2 B n+2B n+3 B n+3B n+4 B n+4B n+5 B n+5(c) (d)图9 遥控过程的信息字格式(a)遥控选择(下行)(b)遥控返校(上行)(c)遥控执行(下行)(d)遥控撤消(下行)说明:(1)开关序号为二进制码。
(2)遥控返校字为上行信息,随机插在上行信息中不跨帧地连送三遍;(3)开关操作将由直流屏进行检查,若不能进行操作则把B n+1字节内容改为FFH;(4)遥控返校后若超时30秒未收到下行的遥控执行命令,本次命令便自动撤消;8.2 设定命令设定命令控制字格式同8.1条遥控命令,但设定命令只有一个下行帧,无返校、执行和撤消命令帧。
控制字的帧类别改为57H,其信息字格式如图10所示。
B n字节B n+1B n+2B n+3B n+4B n+5图10 设定命令(下行)说明:(1)对象号为二进制码;(2)设点数为12进制码,不乘以系数,负数以2的补码表示;9 自定义部分9.1、重要遥测量重要遥测量帧类别码为0x61,控制字节为0x71,其功能码和信息字定义见表4。
直流屏将根据馈电柜的个数决定上送的信息字个数,最大可上送5个馈电柜的遥测量。
如表4所示,当馈电柜个数为1时,直流屏将上送功能码为0x01~0x08的信息字内容;当馈电柜个数为2时,直流屏将上送功能码为0x01~0x08、0x11~0x18的信息字内容;当馈电柜个数为3时,直流屏将上送功能码为0x01~0x08、0x11~0x18、0x21~0x28的信息字内容;当馈电柜个数为4时,直流屏将上送功能码为0x01~0x08、0x11~0x18、0x21~0x28、0x31~0x38的信息字内容;当馈电柜个数为5个时,直流屏将上送功能码为0x01~0x08、0x11~0x18、0x21~0x28、0x31~0x38、0x41~0x48的信息字内容。
直流屏不会把功能码X1~X8 (X取值为0、1、2、3、4,以下同)的信息字全部上送,在直流电源系统接线方式一定的情况下(系统接线方式参见《选型手册》),直流屏只会选择其中的某几个信息字上送。
如表4所示,当系统接线方式为GZDW32或GZDW34时,直流屏将上送功能码为X1、X2、X3的信息字;当系统接线方式为GZDW30时,直流屏将上送功能码为X4、X5的信息字;当系统接线方式为GZDW33或GZDW35时,直流屏将上送功能码为X6、X7的信息字;当系统接线方式为GZDW31时,直流屏将上送功能码为X8的信息字。
在标准直流屏系统中(1个充电柜、1个馈电柜、GZDW35接线方式),通常上送功能码为0x06、0x07的两个信息字的内容,此时表1中的其余信息字不上送。
表4 重要遥测量信息字定义注1:标注为保留的遥测量的最高位(b15)置1,其余位置0(以下同)。
注2:NP9802和NP9802-A监控模块只支持GZDW35接线方式。
9.2、次要遥测量次要遥测量帧类别码为0xC2,控制字节为0x71,其功能码和信息字定义见表5。
直流屏将根据充电柜的个数决定上送的信息字个数,最大可上送5个充电柜的遥测量。
如表5所示,当充电柜个数为1时,直流屏将上送功能码为0x01~0x05的信息字内容;当充电柜个数为2时,直流屏将上送功能码为0x01~0x05、0x11~0x15的信息字内容;当充电柜个数为3时,直流屏将上送功能码为0x01~0x05、0x11~0x15、0x21~0x25的信息字内容;当充电柜个数为4时,直流屏将上送功能码为0x01~0x05、0x11~0x15、0x21~0x25、0x31~0x35的信息字内容;当充电柜个数为5个时,直流屏将上送功能码为0x01~0x05、0x11~0x15、0x21~0x25、0x31~0x35、0x41~0x45的信息字内容。