4.5 线性系统的结构分解和零极点相消
- 格式:ppt
- 大小:1.54 MB
- 文档页数:59
现代控制理论_长安大学中国大学mooc课后章节答案期末考试题库2023年1.线性系统的状态空间表达式如下,则系统能控能观子空间为()维系统。
【图片】答案:22.已知线性定常系统的状态方程如下,状态反馈阵【图片】()使闭环系统极点配置为【图片】。
【图片】答案:3.下列语句中,正确的是()。
答案:系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的。
4.线性系统的状态空间表达式为如下,则系统的模拟结构图为()。
【图片】答案:5.系统方框图,如下图所示,则根据系统方框图建立的状态空间表达式为()。
【图片】答案:6.已知机械系统如下图所示。
其中质量块m受到外力u(t)的作用产生位移y(t),质量块m与地面之间无摩擦。
以外力 u(t)为输入信号,位移y(t)为输出量,系统状态空间模型为()。
【图片】答案:7.若A、B是方阵,则必有【图片】。
答案:错误8.已知单输入单输出系统的传递函数为【图片】,则系统状态空间表达式为()。
答案:9.已知系统的传递函数为【图片】,则系统状态空间表达式为()。
答案:10.原系统传递函数阵的阶数一定高于能控能观子系统传递函数的阶数。
答案:错误11.带状态观测器的状态反馈系统和直接状态反馈系统具有相同的传递函数矩阵。
答案:正确12.带状态观测器的状态反馈系统,观测器的极点会全部被闭环系统的零点相消。
答案:正确13.单输入-单输出线性时不变系统状态空间表达式的矢量矩阵形式为()。
答案:14.系统方框图如下所示,则系统的状态空间表达式为()。
【图片】答案:;15.RLC电路网络如下图所示,其中【图片】为输入电压, 【图片】为输出电压。
选择状态变量【图片】,则系统状态空间表达式为()。
【图片】答案:16.已知单输入单输出系统的微分方程为【图片】,则系统状态空间模型为()。
答案:17.已知系统的传递函数为【图片】,则系统状态空间表达式的对角型实现为()。
答案:18.已知非线性系统的微分方程为【图片】,则利用近似线性化方法得到系统的局部线性化状态方程是()。
第一章 控制系统的状态空间表达式1. 状态空间表达式n 阶 DuCx y Bu Ax x +=+= 1:⨯r u 1:⨯m y n n A ⨯:r n B ⨯:n m C ⨯:r m D ⨯:A 称为系统矩阵,描述系统内部状态之间的联系;B为输入(或控制)矩阵,表示输入对每个状态变量的作用情况;C 输出矩阵,表示输出与每个状态变量间的组成关系,D直接传递矩阵,表示输入对输出的直接传递关系。
2. 状态空间描述的特点①考虑了“输入-状态-输出”这一过程,它揭示了问题的本质,即输入引起了状态的变化,而状态决定了输出。
②状态方程和输出方程都是运动方程。
③状态变量个数等于系统包含的独立贮能元件的个数,n 阶系统有n 个状态变量可以选择。
④状态变量的选择不唯一。
⑤从便于控制系统的构成来说,把状态变量选为可测量或可观察的量更为合适。
⑥建立状态空间描述的步骤:a 选择状态变量;b 列写微分方程并化为状态变量的一阶微分方程组;c 将一阶微分方程组化为向量矩阵形式,即为状态空间描述。
⑦状态空间分析法是时域内的一种矩阵运算方法,特别适合于用计算机计算。
3. 模拟结构图(积分器 加法器 比例器)已知状态空间描述,绘制模拟结构图的步骤:积分器的数目应等于状态变量数,将他们画在适当的位置,每个积分器的输出表示相应的某个状态变量,然后根据状态空间表达式画出相应的加法器和比例器,最后用箭头将这些元件连接起来。
4. 状态空间表达式的建立① 由系统框图建立状态空间表达式:a 将各个环节(放大、积分、惯性等)变成相应的模拟结构图;b 每个积分器的输出选作i x ,输入则为i x;c 由模拟图写出状态方程和输出方程。
② 由系统的机理出发建立状态空间表达式:如电路系统。
通常选电容上的电压和电感上的电流作为状态变量。
利用KVL 和KCL 列微分方程,整理。
③由描述系统的输入输出动态方程式(微分方程)或传递函数,建立系统的状态空间表达式,即实现问题。
2022年长安大学812自动控制理论考研初试大纲一、说明主要内容包括经典控制理论和现代控制理论两部分,试题的比例为:经典控制理论部分占比70%,现代控制理论部分占比30%。
二、考试内容经典控制理论部分的基本内容和要求:1、引论理解开环控制和闭环控制的区别,了解反馈控制理论的研究对象和方法。
掌握自动控制系统的基本概念、术语,了解自动控制系统的组成和分类,及对自动控制系统稳、准、快三方面的基本要求。
2、线性系统的数学模型一般了解数学模型的概念、表达方式,建模的方法;能够列写一般物理系统的微分方程;熟悉拉氏变换的定义、性质,记住常见的简单时间函数的拉氏变换式,能根据拉氏变换的性质求解较复杂时间函数的拉氏变换式,会求拉氏反变换;理解传递函数的概念及典型环节的传递函数。
重点掌握控制系统的方框图及方框图的化简方法,能用梅逊公式求取系统传递函数。
3、线性系统的时域分析了解控制系统的典型输入信号;了解线性定常系统的时域响应组成,熟悉控制系统暂态响应性能指标的定义;熟悉一阶系统的暂态响应及性能指标;熟悉二阶系统的暂态响应分析及其与极点之间的关系,重点掌握二阶系统的瞬态响应指标与参量、 n间的关系及计算;一般了解高阶系统的暂态响应和闭环主导极点的概念;了解稳定性的概念,掌握线性定常连续系统稳定的充要条件;重点掌握判断稳定性的Routh代数判据及应用,对Hurwitz判据有一般了解;了解稳态误差的概念;重点掌握给定稳态误差终值的计算及减小稳态误差的方法。
4、线性系统的根轨迹分析了解根轨迹的概念。
重点掌握绘制常规负反馈系统根轨迹的基本条件和基本规则,能根据已知的系统开环传递函数绘制闭环系统的根轨迹,也能由已知的闭环系统的根轨迹(起点和终点)写出系统的开环传递函数,一般了解参量根轨迹的绘制及增加开环零极点对根轨迹的影响。
5、线性系统的频域分析掌握频率特性的基本概念,幅相频率特性图与对数频率特性图的建立;熟悉典型环节的频率特性及其Nyquist图与Bode图;掌握系统开环频率特性(Nyquist 图和Bode图)的绘制;重点掌握乃奎斯特稳定判据(包括利用开环幅相频率特性曲线和开环对数频率特性曲线进行判断);了解最小相位系统的概念;重点掌握利用实测开环对数幅频特性确定最小相位系统开环传递函数的方法;熟悉控制系统相角裕度、幅值裕度的基本定义和概念及计算方法;了解闭环幅频特性的概念及其频域性能指标。
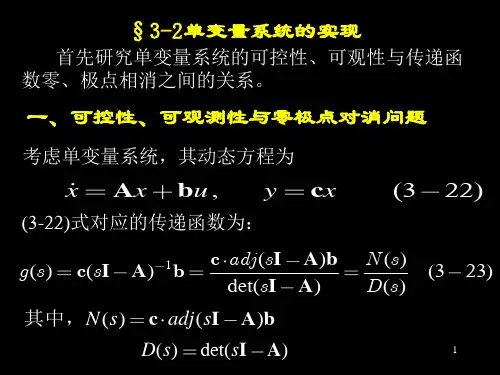
目录一.卡尔曼分解下讨论零极点相消与最小实现 (1)1.1卡尔曼分解概述 (1)1.2卡尔曼分解的原理 (2)1.3 卡尔曼分解与最小实现以及互质分解 (4)二.零极点相消与最小实现的关系 (4)2.1 概述 (4)2.2 单变量系统的能控性、能观性与传递函数零极点相消之间的关系。
(5)2.3 最小实现的判据 (6)三.利用互质分解 (10)3.1 互质分解与卡尔曼分解 (10)3.2 matlab上的验证 (12)3.3 最小实现与互质分解以及卡尔曼分解之间的关系 (13)摘要:本文主要在卡尔曼分解以及互质分解下讨论了最小实现以及零极点相消的问题。
讨论了非互质的传递函数会使系统实现时出现不能控或者不能观的部分,从而引出了卡尔曼分解,卡尔曼分解后的能控能观部分的实现为最小实现,系统维数降低,说明出现了零极点相消的情况。
系统的维数等于互质分解后传递函数的维数的实现时最小实现,此时的实现也是能控能观的实现。
但如果传递函数中消掉的是不稳定的零极点,则不稳定的极点会导致不稳定的状态,出入输出稳定与系统渐进稳定之间是有很大差别的。
一.卡尔曼分解下讨论零极点相消与最小实现1.1卡尔曼分解概述A B C D不卡尔曼分解,即能控能观性分解,在已知系统状态方程{}能控或者不能观的情况下,对其做矩阵等价变换,使其状态变量划分为能控能观、能控不能观、不能控能观、不能控不能观四个部分。
A B C D能够分解为不能控或者不能观部分说明了两个问状态方程{}题:1. 对一个实际系统,并不是所有的状态都能控,也不是说所有的初始状态都能够通过系统输出反映出来,表征输入输出关系的传递函数也仅反映能控能观部分的关系,从而区分输入输出稳定以及系统渐进稳定;2. 卡尔曼分解说明了系统实现时的维数是大于最小实现时的维数的(参见第二章最小实现的内容),因此在表示系统传递函数时必然存在零极点相消的现象,或者说零极点相消的现象使得系统实现时存在不能控或者不能观的部分。
《现代控制理论》课程教学大纲一、课程基本信息1、课程代码:AU3022、课程名称(中/英文):现代控制理论(Modern Control System)3、学时/学分:54学时/3学分4、先修课程:自动控制理论5、面向对象:自动化专业本科生,相邻专业研究生6、开课院(系)、教研室:自动化系7、教材、教学参考书:教材:现代控制理论刘豹机械工业出版社2000教学参考书:Linear System Theory and Design Chi-Tsong Chen Oxford university press 1999二、本课程的性质和任务现代控制理论是自动化专业的高年级本科生的必修课程,课程包括了现代控制理论中的基础理论部分,主要内容为线性系统理论基础内容。
课程首先介绍了控制理论的发展概况和应用概况,说明了线性系统的特性,然后深入讲解系统的状态空间描述,状态空间表达式的求解,线性控制系统的能控性和能观性、系统的稳定性和李雅普诺夫方法、线性定常系统的综合,最优控制问题的概述和线性定常二次型最优控制问题。
通过本课程的学习,学生可以掌握线性系统的基本分析和设计方法,为学生学习后继课程、从事工程技术工作、科学研究及开拓性技术工作打下坚实的基础。
三、本课程教学内容和基本要求《现代控制理论》现代控制理论的教学内容分为七部分,对不同的内容提出不同的教学要求。
(数字表示供参考的相应的学时数)第一章概论(1)控制理论的发展、现代控制理论的特点及举例、线性系统的特点(1)要求:掌握现代控制理论与经典控制理论的不同点和线性系统的特点。
第二章控制系统的状态空间表达式(7)1.状态变量及状态空间表达式、状态空间表达式的模拟结构图(2)2.状态空间表达式的建立(一)(1)3.状态空间表达式的建立(二)(1)4.状态向量的线性变换(1)5.由状态空间表达式求传递函数阵、时变系统和非线性系统的状态空间表达式(2)要求:熟练掌握系统状态空间表达方法的概念、形式,掌握系统状态空间表达式的各种建立方法、掌握系统的线性变换方法、掌握模型转换方法。
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ【解】: (1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CABCB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。