平面机构自由度的计算-计算公式
- 格式:pdf
- 大小:340.16 KB
- 文档页数:8


平面机构自由度计算及结构分析在机械工程领域,平面机构是由一系列连接件和铰链组成的机械系统,在平面内进行运动。
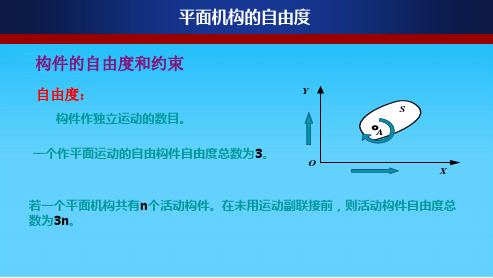
平面机构的自由度指的是机构能够独立移动的自由度数量。
自由度的计算及结构分析是设计和优化机构的重要环节,下面将详细介绍平面机构自由度的计算及结构分析方法。
1.平面机构自由度计算的基本原理平面机构中常见的连接件包括滑动副、铰链副和齿轮副等。
根据这些连接件的类型和数量,可以确定机构的格式方程。
例如,如果机构中有n个滑动副,则格式方程的数量为2n,因为每个滑动副有两个约束方程(平移约束和转动约束)。
同样地,如果机构中有m个铰链副,则格式方程的数量为m。
确定格式方程后,我们需要计算机构的独立运动方程数量。
独立运动方程描述了机构中各连接件之间的相对运动关系。
对于平面机构,独立运动方程的数量等于机构中的自由度数量。
通过求解格式方程和独立运动方程,我们可以得到平面机构的总约束方程数量。
然后,通过公式自由度=3n-总约束方程数量,可以计算机构的自由度数量。
2.平面机构自由度计算方法(1)基于迎接方式的计算方法这是一种基本的自由度计算方法,其思想是通过分析机构中两个相邻部件之间的约束关系来计算自由度数量。
首先,确定机构的基本框架,并标记出机构的连杆、滑块等部件。
然后,根据机构的连杆相邻部件之间的连接方式和铰链类型,确定相邻部件之间的约束关系。
对于滑块,如果其只能实现平移运动,则约束数量为2;如果可以实现平移和转动,则约束数量为3、类似地,对于连杆,如果只能实现转动运动,则约束数量为1;如果可以实现平移和转动,则约束数量为2在计算约束数量时,需要注意对于普通铰链,其约束数量为2;对于直线铰链,其约束数量为1;对于齿轮铰链,其约束数量为0。
通过统计各部件之间的约束数量,可以得到机构的自由度数量。
(2)利用虚位移法的计算方法虚位移法是一种准确且广泛应用的方法,用于计算机构的自由度数量。
这种方法基于贝努利-克洛福特定理,即机构中任意一点的虚位移应符合约束条件。
平面机构自由度名词解释引言在机械领域中,机构是由零件连接而成的一个特定结构,用于完成特定的运动或力学转换任务。
其中,平面机构是一种常见的机构类型,用于在平面内进行运动。
在设计和分析平面机构时,我们需要了解和考虑机构的自由度。
什么是自由度?自由度是指机构中能够独立变化的运动参数的数量。
简单来说,自由度是机构中可以自由变动的独立运动方式的个数。
在平面机构中,自由度可以进一步分为以下两个概念:1. 杆件的自由度杆件的自由度指的是杆件可以相对于其他杆件进行的独立旋转或平动的运动方式的数量。
根据杆件的运动方式,可以将杆件的自由度分为以下几种情况:•固定点:杆件不发生变化,没有自由度;•固定线:杆件沿着一条直线运动,有一个自由度;•固定面:杆件平行于一个平面,有两个自由度;•固定曲面:杆件沿着一个曲面运动,有三个自由度。
2. 机构的自由度机构的自由度是指机构整体进行运动时能够独立变化的运动参数的数量。
要计算机构的自由度,可以使用如下公式:自由度 = 3n - m其中,n为机构中的杆件数量,m为机构中的支撑约束数量。
支撑约束是指限制机构中某些杆件完全运动的约束条件,比如固定连接或者支座支撑。
平面机构的自由度计算平面机构是指所有的零件都位于同一平面内的机构。
在计算平面机构的自由度时,可以按照以下步骤进行:步骤1:确定杆件数量首先,我们需要确定平面机构中的杆件数量。
杆件是平面机构中传递力和实现运动的关键组成部分。
步骤2:确定支撑约束数量接下来,我们需要确定平面机构中的支撑约束数量。
支撑约束可以是固定连接或者支座支撑。
步骤3:计算自由度根据上述提到的公式,我们可以计算平面机构的自由度。
将杆件数量和支撑约束数量代入公式中,即可得到平面机构的自由度。
平面机构的应用自由度在平面机构的设计和分析中起着重要的作用。
了解平面机构的自由度可以帮助工程师理解机构的运动特性,从而更好地设计和优化机构。
平面机构广泛应用于各个领域,例如机械工程、汽车工程、航空航天工程等。
平面机构(运动链)自由度计算辅导运动链是指若干个构件通过运动副连接而成的系统。
运动链自由度计算主要解决的问题是:1、运动链的可动性;2、运动链运动的确定性,即运动链成为机构的条件。
一、平面机构(运动链)自由度:㈠、计算公式:F=3n-2P L-P H⑴式中:F—机构(运动链)自由度;n—机构(运动链)中的运动构件数;P L—机构(运动链)中低副数,包括移动副和转动副; P H—机构(运动链)中的高副数。
㈡、公式用途:运动链类型:⑴、固定运动链:组成运动链的构件之间没有相对运动。
如桥梁、钢结构支架等。
⑵、可动运动链:①、运动不确定的可动运动链:运动链可动,但运动链中构件的运动不能确定。
②、具有确定运动的运动链及机构。
运动链中构件的具有确定性。
1、判别运动链能否运动(运动链可动性分析):⑴、当F﹥0 运动链能运动,即运动链是可动的。
⑵、当F≦0 运动链不动,即运动链为固定运动链。
例:判别下面运动链的可动性:图示:n=3,P L=4,P H=1 。
F=3n-2P L-P H =3×3-2×4-1=0运动链不可动。
图示:n=4,P L=5,P H=1 。
F=3n-2P L-P H =3×4-2×5-1=1﹥0运动链可动。
2、判别运动链是否成为机构:运动链的运动确定性分析。
⑴、当F≦0 运动链不可动,此种运动链不能成为机构;⑵、当F﹥0 运动链可动:①、若F﹥原动件数,运动链不能成为机构;②、若F=原动件数,运动链运动确定,运动链成为机构;③、若F﹤原动件数,运动链不能成为机构。
结论:运动链成为机构的条件:F﹥0,且F等于机构原动件数。
㈢、机构自由度计算时应注意的问题:1、复合铰链及其处理方法:⑴、概念:复合铰链:多个构件(含固定件)在同一处形成两个或两个以上转动副,该处成为复合铰链。
⑵、处理方法:P L=m-1,m为该处构件数(含固定件)。
⑶、常见形式:①、②、③、④、例:计算下面运动链自由度,说明要使运动链成为机构需要几个原动件。
第二章机构的结构分析
——机构自由度的计算(1)
§2-4机构自由度的计算
一、计算公式
平面自由构件:3个自由度
平面低副:引入2个约束
平面高副:引入1个约束
假设平面机构有n个活动构件:
3n个自由度
有P l 个低副和P h个高副:
引入(2 P l +P h )约束
平面机构的自由度计算公式:
F=3n-(2 P l +P h )=3n-2 P l -P h
练习:
n=3
p l=4
p h=0 F=3n-2 p l–p h=3×3 -2×4-0=1
练习:
3
2
1
项
二、自由度计算的注意事
1.复合铰链(compound hinge)
两个以上构件在同一处以转动副相联接即构成复合铰链。
m个构件以复合铰链联接所构成的转动副数为(m-1)
个。
2. 局部自由度(passive DOF)
机
构
中某些构件所产生的局部运动并不影响其他构件的运动,把这种局部运动的自由度称为局部自由度。
方法一:假想构件2和3焊成一体
F=3n-2 p l–p h=3×2 -2×2-1=1
F=3n-2 p l–p h–F'=3×3-2×3-1-1=1
式中:F'为局部自由度
方法二:从自由度计算公式中减去局部自由度
小结
存在于转动副处
正确处理方法:复合铰链处有m 个构件则有(m -1)个转动副
◆复合铰链◆局部自由度
常发生在为减小高副磨损而将滑动摩擦变成滚动摩擦所增加的滚子处。
正确处理方法:计算自由度时将局部自由度减去。
平面机构的自由度计算公式:
F =3n -(2 P l +P h )=3n-2 P l -P h
问题?。