abaqus第九讲:显式动力学问题资料
- 格式:ppt
- 大小:160.00 KB
- 文档页数:2
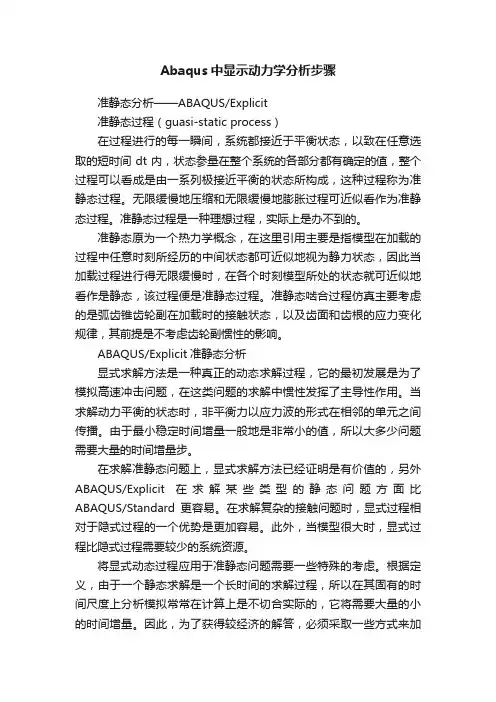
Abaqus中显示动力学分析步骤准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
第九章 动力问题如果只对结构加载荷后的长期响应感兴趣的话,静力分析就足够了。
然而,如果加载时间很短,例如地震;或者载荷性质为动态,例如来自旋转机械的荷载,这时就必须采用动力分析。
9.1 引言动态模拟是将惯性力包含在动力学平衡方程中:0=-+P I uM 其中 M 是结构的质量。
u是结构的加速度。
I 是结构中的内力。
P 是所施加的外力。
公式的表述无非是牛顿的第二运动定律(F=ma )的表现。
动态分析和静态分析最主要的不同在于平衡方程中包含惯性力项(M u)。
两者的另一个不同之处在于内力I 的定义。
在静态分析中,内力仅由结构的变形引起;而动态分析中的内力包括运动(例如阻尼)和结构变形的共同贡献。
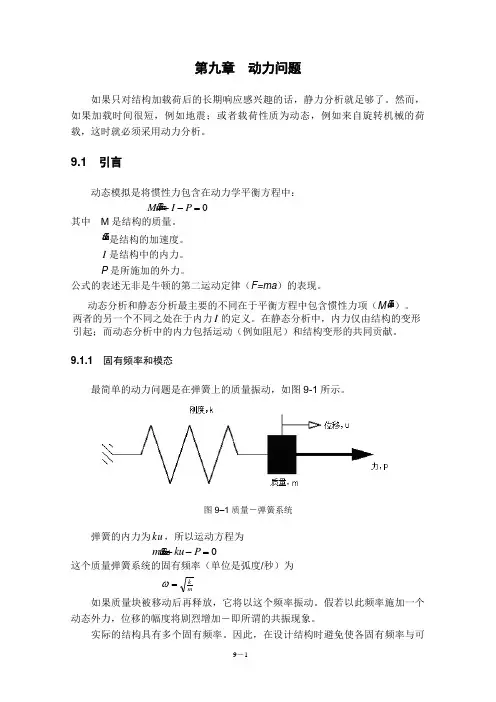
9.1.1 固有频率和模态最简单的动力问题是在弹簧上的质量振动,如图9-1所示。
图9–1质量-弹簧系统弹簧的内力为ku ,所以运动方程为muku P +-=0 这个质量弹簧系统的固有频率(单位是弧度/秒)为m k =ω如果质量块被移动后再释放,它将以这个频率振动。
假若以此频率施加一个动态外力,位移的幅度将剧烈增加-即所谓的共振现象。
实际的结构具有多个固有频率。
因此,在设计结构时避免使各固有频率与可能的荷载频率过分接近就很重要。
固有频率可以通过分析结构在无荷载(动力平衡方程中的)时的动态响应而得到。
此时,运动方程变为 M u I +=0 对于无阻尼系统,,则上式变为 M uKu +=0 这个方程解的形式为 t i e u ωφ=将此式代入到运动方程中便得到了特征值问题方程K M φλφ=其中λω=2。
该系统具有n 个特征值,此处n 是有限元模型的自由度数。
记j λ为第j 个特征值。
它的平方根j ω是结构的第j 阶固有频率,并且j φ是相应的第j 阶特征向量。
特征向量也就是所谓的模态(也称为振型),因为它是结构在第j 阶振型下的变形状态。
在ABAQUS 中,频率提取程序用来求解结构的振型和频率。
这个程序使用起来十分简单,只要给出所需振型的数目和所关心的最高频率即可。
准静态分析—-ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响.ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用.当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易.此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟.但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
9 显式非线性动态分析在前面的章节中,已经考察了显式动态程序的基本内容;在本章中,将对这个问题进行更详细的讨论。
显式动态程序对于求解广泛的、各种各样的非线性固体和结构力学问题是一种非常有效的工具。
它常常对隐式求解器是一个补充,如ABAQUS/Standard;从用户的观点来看,显式与隐式方法的区别在于:•显式方法需要很小的时间增量步,它仅依赖于模型的最高固有频率,而与载荷的类型和持续的时间无关。
通常的模拟需要取10,000至1,000,000个增量步,每个增量步的计算成本相对较低。
•隐式方法对时间增量步的大小没有内在的限制;增量的大小通常取决于精度和收敛情况。
典型的隐式模拟所采用的增量步数目要比显式模拟小几个数量级。
然而,由于在每个增量步中必须求解一套全域的方程组,所以对于每一增量步的成本,隐式方法远高于显式方法。
了解两个程序的这些特性,能够帮助你确定哪一种方法是更适合于你的问题。
9.1 ABAQUS/Explicit适用的问题类型在讨论显式动态程序如何工作之前,有必要了解ABAQUS/Explicit适合于求解哪些类问题。
贯穿这本手册,我们已经提供了贴切的例题,它们一般是应用ABAQUS/Explicit求解的如下类型问题:高速动力学(high-speed dynamic)事件最初发展显式动力学方法是为了分析那些用隐式方法(如ABAQUS/Standard)分析起来可能极端费时的高速动力学事件。
作为此类模拟的例子,在第10章“材料”中分析了一块钢板在短时爆炸载荷下的响应。
因为迅速施加的巨大载荷,结构的响应变化的非常快。
对于捕获动力响应,精确地跟踪板内的应力波是非常重要的。
由于应力波与系统的最高阶频率相关联,因此为了得到精确解答需要许多小的时间增量。
复杂的接触(contact)问题应用显式动力学方法建立接触条件的公式要比应用隐式方法容易得多。
结论是ABAQUS/Explicit能够比较容易地分析包括许多独立物体相互作用的复杂接触问题。
9 显式非线性动态分析在前面的章节中,已经考察了显式动态程序的基本内容;在本章中,将对这个问题进行更详细的讨论。
显式动态程序对于求解广泛的、各种各样的非线性固体和结构力学问题是一种非常有效的工具。
它常常对隐式求解器是一个补充,如ABAQUS/Standard;从用户的观点来看,显式与隐式方法的区别在于:•显式方法需要很小的时间增量步,它仅依赖于模型的最高固有频率,而与载荷的类型和持续的时间无关。
通常的模拟需要取10,000至1,000,000个增量步,每个增量步的计算成本相对较低。
•隐式方法对时间增量步的大小没有内在的限制;增量的大小通常取决于精度和收敛情况。
典型的隐式模拟所采用的增量步数目要比显式模拟小几个数量级。
然而,由于在每个增量步中必须求解一套全域的方程组,所以对于每一增量步的成本,隐式方法远高于显式方法。
了解两个程序的这些特性,能够帮助你确定哪一种方法是更适合于你的问题。
9.1 ABAQUS/Explicit适用的问题类型在讨论显式动态程序如何工作之前,有必要了解ABAQUS/Explicit适合于求解哪些类问题。
贯穿这本手册,我们已经提供了贴切的例题,它们一般是应用ABAQUS/Explicit求解的如下类型问题:高速动力学(high-speed dynamic)事件最初发展显式动力学方法是为了分析那些用隐式方法(如ABAQUS/Standard)分析起来可能极端费时的高速动力学事件。
作为此类模拟的例子,在第10章“材料”中分析了一块钢板在短时爆炸载荷下的响应。
因为迅速施加的巨大载荷,结构的响应变化的非常快。
对于捕获动力响应,精确地跟踪板内的应力波是非常重要的。
由于应力波与系统的最高阶频率相关联,因此为了得到精确解答需要许多小的时间增量。
复杂的接触(contact)问题应用显式动力学方法建立接触条件的公式要比应用隐式方法容易得多。
结论是ABAQUS/Explicit能够比较容易地分析包括许多独立物体相互作用的复杂接触问题。
Abaqus-中显示动力学分析步骤Abaqus-中显示动力学分析步骤准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。