自动控制原理2第九章
- 格式:pptx
- 大小:12.69 MB
- 文档页数:17
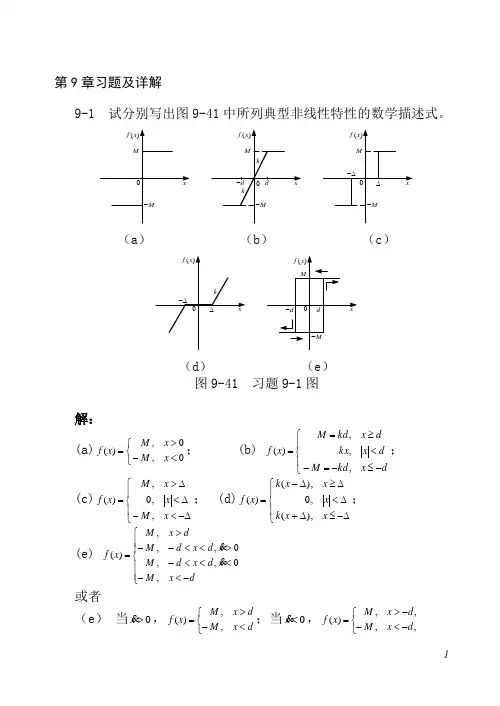
第9章习题及详解9-1 试分别写出图9-41中所列典型非线性特性的数学描述式。
(a )(b )(c )(d ) (e ) 图9-41 习题9-1图解: (a)⎩⎨⎧<->=0,0,)(x M x M x f ;(b) ⎪⎩⎪⎨⎧-≤-=-<≥==d x kd M d x kx d x kd M x f ,,,)(; (c)⎪⎩⎪⎨⎧∆-<-∆<∆>=x M x x M x f ,,0,)(;(d)⎪⎩⎪⎨⎧∆-≤∆+∆<∆≥∆-=x x k x x x k x f ,)(,0,)()(; (e) ⎪⎪⎩⎪⎪⎨⎧-<-<<<-><<-->=dx M xd x d M xd x d M dx M x f ,0,,0,,,)( 或者(e ) 当0>x,⎩⎨⎧<->=d x M d x M x f ,,)(;当0<x ,⎩⎨⎧-<-->=,,,,)(d x M d x M x f9-2 试用解析法求下列系统相轨迹方程的解。
(1)122=+x x(2)0sin =-+x x x解:(1)相变量方程为⎩⎨⎧-==221x x x x0))0(())0((32))0((21)(32)(212)12(3322003020020020=---+-=-+=-+=-+⎰⎰⎰⎰⎰⎰⎰⎰x x x x x x dx x d x d dx dx x x d x dx x x d xt t t t t t t t相轨迹方程的解为)0(6)0(4)0(36433232x x x x x x-+=-+ (2)相变量方程为 ⎩⎨⎧-==x x x x xsin0))0((21))0(cos (cos ))0((21)(21)(cos )(21)(sin 22220200200=-----=--=-+⎰⎰⎰⎰⎰x x x x x x x d x d x d x dx x x x d x t t t tt相轨迹方程的解为)0()0(cos 2)0(cos 22222x x x x x x--=--9-3 考虑系统02=+x x ω,其中,1<ω,试用解析法求该系统的相平面图。

第一章绪论(6学时)
微型计算机发展概况、数制和码制。
第二章 8086 系统结构(8学时)
8086CPU结构、8086CPU的引脚及其功能、8086存储器组织、8086系统配置、8086CPU 时序。
第三章 8086的寻址方式和指令系统(10学时)
8086的寻址方式、指令的机器码表示方法、8086的指令系统。
第四章汇编语言程序设计(10学时)
汇编语言程序格式、MASM中的表达式、伪指令语句、程序设计方法、DOS系统功能调用。
第五章存储器(6学时)
存储器分类、随机存取存储器RAM、只读存储器ROM、CPU与存储器的连接。
第六章 I/O接口和总线(6学时)
I/O接口的功能、简单的输入输出芯片、I/O端口及其编址方式、I/O端口地址译码、CPU 与外设间的数据传送方式。
第七章可编程外围接口芯片8255A及应用(4学时)
8255A的结构和功能、8255A的控制字及初始化编程、8255A工作方式和C口状态字、8255A的应用举例。
第八章可编程计数器/定时器8253及应用(4学时)
8253的内部结构与引脚信号、8253的初始化编程、8253的工作方式、8253与系统的连接、8253的应用举例。
第九章微型计算机中断系统(8学时)
中断处理过程、中断优先级和中断嵌套、可编程中断控制器8259A。
第十章 A/D、D/A转换(6学时)
A/D转换器工作原理、D/A转换器工作原理、转换器与CPU连接。
第十一章高档微处理器(6学时)
CPU内部结构、管脚信号说明、寄存器组成。
第九章线性系统的状态空间分析与综合9-1 线性系统的状态空间描述9-2 线性系统的可控性与可观性9-3 线性定常系统的反馈结构及状态观测器9-4 李雅普诺夫稳定性分析9-5 控制系统状态空间设计9凯莱-哈密顿定理设n 阶矩阵A 的特征多项式:则A 满足其特征方程,即推论1 矩阵A 的次幂可表示为A 的n-1阶多项式:式中与A 阵的元素有关。
1110()n n n f I A a a a λλλλλ−−=−=++++ 1110()n n n f A A a A a A a I−−=++++ ()k k n ≥10 , n k mm m A A k n α−==≥∑m α9秩判据线性定常连续系统:其状态完全可控的充分必要条件是:其中,A 为n 维方阵;称为系统的可控性判别阵。
0()()(), (0), 0xt Ax t Bu t x x t =+=≥ 1n rank B AB A B n −⎡⎤=⎣⎦1 n S B AB A B −⎡⎤=⎣⎦9PBH 秩判据线性定常连续系统:其状态完全可控的充分必要条件是:式中,是矩阵A 的所有特征值。
另一种等价描述为:说明:因为这个判据是由波波夫(Popov ) 和贝尔维奇(Belevitch ) 首先提出,并由豪塔斯(Hautus ) 最先指出其可广泛应用性,故称为PBH 秩判据。
0()()(), (0), 0xt Ax t Bu t x x t =+=≥ (1,2,,)i i n λ= [] ; 1,2,,i rank I A B n i nλ−== [] ; rank sI A B n s C−=∀∈9对角线规范型判据线性定常连续系统:矩阵A 的特征值两两相异,变为对角线规范型:系统完全可控的充要条件不包含元素全为零的行12,,,n λλλ 12 0 0 n x x Bu λλλ⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎣⎦ 0()()(), (0), 0xt Ax t Bu t x x t =+=≥ B4. 输出可控性如果系统需要控制的是输出量,而不是状态,则需要研究系统的输出可控性。
⾃动控制原理-第9章控制系统的⾮线性问题9 控制系统的⾮线性问题9.1概述在物理世界中,理想的线性系统并不存在。
严格来讲,所有的控制系统都是⾮线性系统。
例如,由电⼦线路组成的放⼤元件,会在输出信号超过⼀定值后出现饱和现象。
当由电动机作为执⾏元件时,由于摩擦⼒矩和负载⼒矩的存在,只有在电枢电压达到⼀定值的时候,电动机才会转动,存在死区。
实际上,所有的物理元件都具有⾮线性特性。
如果⼀个控制系统包含⼀个或⼀个以上具有⾮线性特性的元件,则称这种系统为⾮线性系统,⾮线性系统的特性不能由微分⽅程来描述。
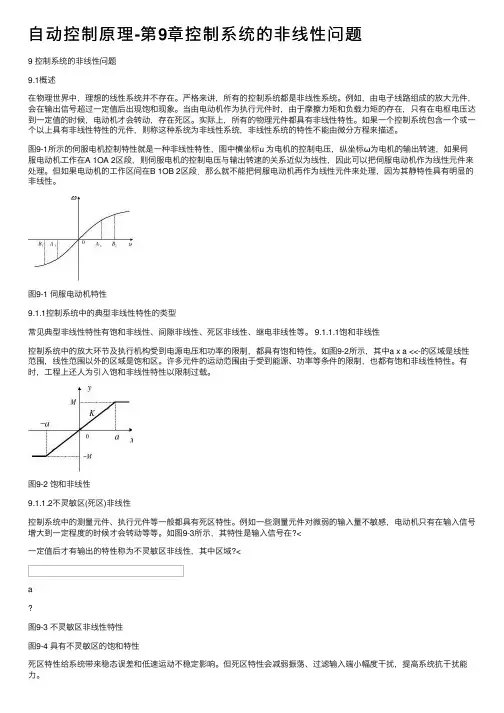
图9-1所⽰的伺服电机控制特性就是⼀种⾮线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机⼯作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。
但如果电动机的⼯作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的⾮线性。
图9-1 伺服电动机特性9.1.1控制系统中的典型⾮线性特性的类型常见典型⾮线性特性有饱和⾮线性、间隙⾮线性、死区⾮线性、继电⾮线性等。
9.1.1.1饱和⾮线性控制系统中的放⼤环节及执⾏机构受到电源电压和功率的限制,都具有饱和特性。
如图9-2所⽰,其中a x a <<-的区域是线性范围,线性范围以外的区域是饱和区。
许多元件的运动范围由于受到能源、功率等条件的限制,也都有饱和⾮线性特性。
有时,⼯程上还⼈为引⼊饱和⾮线性特性以限制过载。
图9-2 饱和⾮线性9.1.1.2不灵敏区(死区)⾮线性控制系统中的测量元件、执⾏元件等⼀般都具有死区特性。
例如⼀些测量元件对微弱的输⼊量不敏感,电动机只有在输⼊信号增⼤到⼀定程度的时候才会转动等等。
如图9-3所⽰,其特性是输⼊信号在?<⼀定值后才有输出的特性称为不灵敏区⾮线性,其中区域?<a图9-3 不灵敏区⾮线性特性图9-4 具有不灵敏区的饱和特性死区特性给系统带来稳态误差和低速运动不稳定影响。
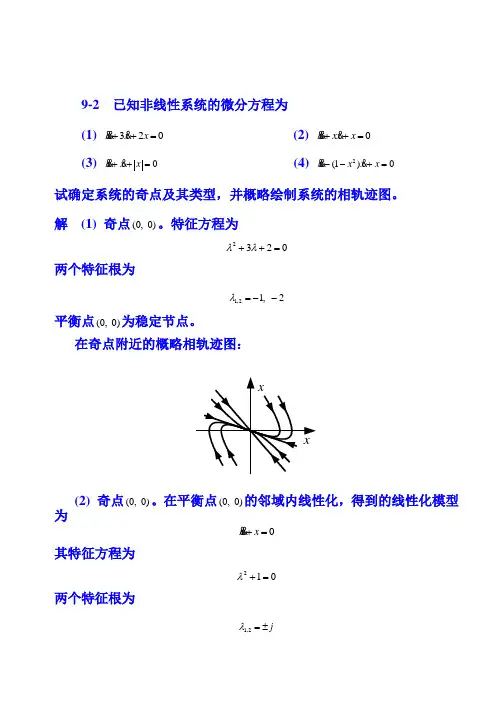
9-2 已知非线性系统的微分方程为 (1) 320x x x ++=&&& (2) 0x xx x ++=&&& (3)0x x x ++=&&&(4)2(1)0x x x x --+=&&&试确定系统的奇点及其类型,并概略绘制系统的相轨迹图。
解 (1) 奇点(0, 0)。
特征方程为2320λλ++=两个特征根为1,21, 2λ=--平衡点(0, 0)为稳定节点。
在奇点附近的概略相轨迹图:x(2) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为0x x +=&&其特征方程为210λ+=两个特征根为1,2j λ=±平衡点(0, 0)为中心点。
在奇点附近的概略相轨迹图:xx(3) 奇点(0, 0)。
原方程可改写为0000x x x xx x x x++=≥⎧⎨+-=<⎩&&&&&&其特征方程、特征根和类型为21,221,2100.50.86610 1.618, 0.618jλλλλλλ⎧++==-±⎪⎨+-==-⎪⎩稳定焦点鞍点在奇点附近的概略相轨迹图:(4) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型12 为0x x x -+=&&&其特征方程为210λλ-+=两个特征根为1,20.50.866j λ=±平衡点(0, 0)为不稳定焦点。
在奇点附近的概略相轨迹图:x9-6 非线性系统的结构图如图9-51所示,其中0.2a =,0.2b =,4K =,1T s =。
试分别画出输入信号取下列函数时在e -e&平面上系统的相平面图(设系统原处于静止状态)。
(1) () 2 1()r t t =g(2)() 2 1()0.4r t t t =-+g(3)() 2 1()0.8r t t t =-+g(4)() 2 1() 1.2r t t t =-+g图9-51 题9-6图解:由系统结构图可得4c c u +=&&&。
9-2 已知非线性系统的微分方程为 (1) 320x x x ++= (2) 0x xx x ++= (3)0x x x ++=(4)2(1)0x x x x --+=试确定系统的奇点及其类型,并概略绘制系统的相轨迹图。
解 (1) 奇点(0, 0)。
特征方程为2320λλ++=两个特征根为1,21, 2λ=--平衡点(0, 0)为稳定节点。
在奇点附近的概略相轨迹图:x(2) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型为0x x +=其特征方程为210λ+=两个特征根为1,2j λ=±1平衡点(0, 0)为中心点。
在奇点附近的概略相轨迹图:x(3) 奇点(0, 0)。
原方程可改写为0000x x x x x x x x ++=≥⎧⎨+-=<⎩ 其特征方程、特征根和类型为21,221,2100.50.866 10 1.618, 0.618 j λλλλλλ⎧++==-±⎪⎨+-==-⎪⎩稳定焦点鞍点 在奇点附近的概略相轨迹图:(4) 奇点(0, 0)。
在平衡点(0, 0)的邻域内线性化,得到的线性化模型2 为0x x x -+=其特征方程为210λλ-+=两个特征根为1,20.50.866j λ=±平衡点(0, 0)为不稳定焦点。
在奇点附近的概略相轨迹图:x9-6 非线性系统的结构图如图9-51所示,其中0.2a =,0.2b =,4K =,1T s =。
试分别画出输入信号取下列函数时在e -e 平面上系统的相平面图(设系统原处于静止状态)。
(1) () 2 1()r t t =(2)() 2 1()0.4r t t t =-+(3)() 2 1()0.8r t t t =-+(4)() 2 1() 1.2r t t t =-+图9-51 题9-6图解:由系统结构图可得4c c u +=。
由于e r c =-,那么4e e u r r ++=+。