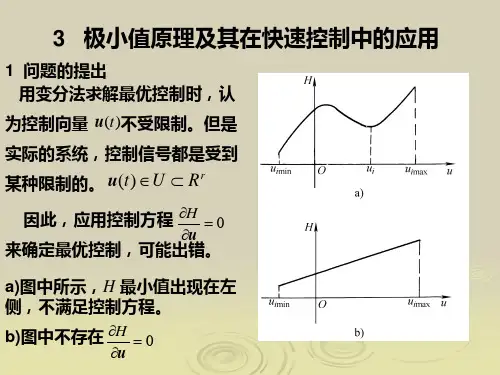
11讲 最优控制-极小值-总结及习题讲解
- 格式:pdf
- 大小:2.99 MB
- 文档页数:46
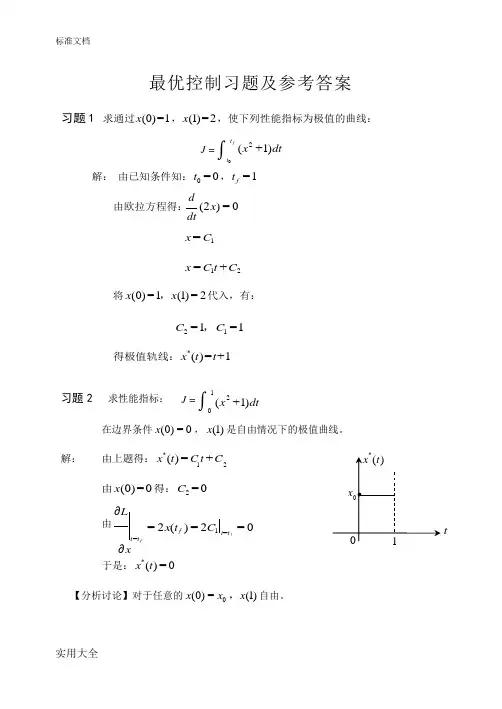
标准文档1 2f最优控制习题及参考答案习题 1 求通过 x (0) = 1 , x (1) = 2 ,使下列性能指标为极值的曲线:t f J = ∫(x2 +1)dt t 0解: 由已知条件知: t 0 = 0 , t f = 1d由欧拉方程得: (2x ) = 0dtx = C 1x = C 1t + C 2将 x (0) = 1,x (1) = 2 代入,有:C 2 = 1,C 1 = 1得极值轨线: x *(t ) = t +1习题 2 求性能指标: J = ∫ 1(x 2 +1)dt在边界条件 x (0) = 0 , x (1) 是自由情况下的极值曲线。
解:由上题得: x *(t ) = C t + C由 x (0) = 0 得: C 2 = 0∂L由∂xt =t f= 2x (t f ) = 2C 1 t =t = 0 t于是: x *(t ) = 0【分析讨论】对于任意的 x (0) = x 0 ,x (1) 自由。
2 0 1∫⎩ λ = −λ有: C = x , C = 0 ,即: x *(t ) = x 其几何意义: x (1) 自由意味着终点在虚线上任意点。
习题 3 已知系统的状态方程为: x1 (t ) = x2 (t ) , x 2 (t ) = u (t )边界条件为: x 1 (0) = x 2 (0) = 1 , x 1 (3) = x 2 (3) = 0 ,31 试求使性能指标 J =u 2(t )dt 2取极小值的最优控制 u *(t ) 以及最优轨线 x *(t ) 。
⎡ x ⎤解:由已知条件知: f = ⎢ 2⎥⎢⎣ u ⎥⎦Hamiton 函数: H = L + λT f H = 1u 2 + λ x + λ u⎧λ = 0由协态方程: ⎨ 12 121 22⎧λ = C① 得: ⎨11⎩λ2 = −C 1t + C 2②∂H由控制方程: ∂u= u + λ2 = 0得: u = −λ2 = C 1t − C 2 ③由状态方程: x 2 = u = C 1t − C 2得: x (t ) = 1C t 2− C t + C④22 由状态方程: x 1 = x 21 2 3得: x (t ) = 1C t 3− 1C t 2+ C t + C⑤16 122 3 41 ∫⎪⎩=−=−⎡1⎤ ⎡0⎤将 x (0) = ⎪ ⎪ , x (3) = ⎪0⎪ 代入④,⑤,⎣1⎦ ⎣ ⎦10联立解得: C 1 =由③、④、⑤式得:u * (t ) = 10t − 29 , C 2 = 2 , C 3 = C 4 = 1 9x *(t ) = 5 t 3 −t 2 + t +127 x *(t ) = 5 t 2 − 2t +1 29习题 4 已知系统状态方程及初始条件为x =u , x (0) = 1试确定最优控制使下列性能指标取极小值。


1 2f最优控制习题及参考答案习题 1 求通过 x (0) = 1 , x (1) = 2 ,使下列性能指标为极值的曲线:t f J = ∫ (x2 +1)dt t 0解: 由已知条件知: t 0 = 0 , t f = 1d由欧拉方程得: (2x ) = 0dtx = C 1x = C 1t + C 2将 x (0) = 1,x (1) = 2 代入,有:C 2 = 1,C 1 = 1得极值轨线: x *(t ) = t +1习题 2 求性能指标: J =∫1(x 2 +1)dt在边界条件 x (0) = 0 , x (1) 是自由情况下的极值曲线。
解:由上题得: x *(t ) = C t + Cx * (t )由 x (0) = 0 得: C 2 = 0∂L由∂xt =t f= 2x (t f ) = 2C 1 t =t= 0 t于是: x *(t ) = 0【分析讨论】对于任意的 x (0) = x 0 ,x (1) 自由。
20 1 0 ∫ ⎩ λ= −λ有: C = x , C = 0 ,即: x *(t ) = x 其几何意义: x (1) 自由意味着终点在虚线上任意点。
习题 3 已知系统的状态方程为: x1 (t ) = x2 (t ) , x 2 (t ) = u (t )边界条件为: x 1 (0) = x 2 (0) = 1 , x 1 (3) = x 2(3) = 0 ,31 试求使性能指标 J =u 2(t)dt2取极小值的最优控制 u * (t ) 以及最优轨线 x *(t ) 。
⎡ x ⎤解:由已知条件知: f = ⎢ 2⎥⎢⎣ u ⎥⎦Hamiton 函数: H = L + λT fH = 1u 2 + λ x+ λ u⎧λ = 0 由协态方程: ⎨ 12 1 21 22⎧λ = C① 得: ⎨11⎩λ2 = −C 1t + C 2②∂H由控制方程: ∂u= u + λ2 = 0得: u = −λ2 = C 1t − C 2 ③由状态方程: x 2 = u = C 1t − C 2得: x (t ) = 1C t 2− C t + C ④22由状态方程: x 1 = x 21 2 3得: x (t ) = 1 C t 3− 1C t 2+ C t + C ⑤16 122 3 41⎪⎩=− ∫⎡1⎤ ⎡0⎤将 x (0) = ⎪ ⎪ , x (3) = ⎪0⎪ 代入④,⑤,⎣1⎦ ⎣ ⎦10联立解得: C 1 =由③、④、⑤式得:u * (t ) = 10t− 29, C 2 = 2 , C 3 = C 4 = 1 9x * (t ) = 5 t 3−t 2 + t +1 27 x *(t ) = 5 t 2 − 2t +1 29习题 4 已知系统状态方程及初始条件为x =u , x (0) = 1试确定最优控制使下列性能指标取极小值。
12f最优控制习题及参考答案习题 1 求通过 x (0) = 1 , x (1) = 2 ,使下列性能指标为极值的曲线:t f J = ∫(x2 +1)dt t 0解: 由已知条件知: t 0 = 0 , t f = 1d由欧拉方程得: (2x ) = 0dtx = C 1x = C 1t + C 2将 x (0) = 1,x (1) = 2 代入,有:C 2 = 1,C 1 = 1得极值轨线: x * (t ) = t +1习题 2 求性能指标: J = ∫ 1(x 2 +1)dt在边界条件 x (0) = 0 , x (1) 是自由情况下的极值曲线。
解:由上题得: x *(t ) = C t + C由 x (0) = 0 得: C 2 = 0∂L由∂xt =t f= 2x (t f ) = 2C 1 t =t = 0 t于是: x * (t ) = 0【分析讨论】对于任意的 x (0) = x 0 ,x (1) 自由。
2 0 1 0∫ ⎩ λ= −λ 有: C = x , C = 0 ,即: x *(t ) = x其几何意义: x (1) 自由意味着终点在虚线上任意点。
习题 3 已知系统的状态方程为: x1 (t ) = x2 (t ) , x 2 (t ) = u (t )边界条件为: x 1 (0) = x 2 (0) = 1 , x 1 (3) = x 2 (3) = 0 ,31 试求使性能指标 J = 0 u 2(t )dt2取极小值的最优控制 u * (t ) 以及最优轨线 x * (t ) 。
⎡ x ⎤ 解:由已知条件知: f = ⎢ 2 ⎥⎢⎣ u ⎥⎦Hamiton 函数: H = L + λT fH = 1u 2 + λ x + λ u⎧λ = 0由协态方程: ⎨12 121 22⎧λ = C① 得: ⎨11⎩λ2 = −C 1t + C 2 ②∂H由控制方程: ∂u= u + λ2 = 0得: u = −λ2 = C 1t − C 2③由状态方程: x 2 = u = C 1t − C 2得: x (t ) = 1C t 2− C t + C④22由状态方程: x 1 = x 21 23得: x (t ) = 1C t 3 − 1C t 2 + C t + C⑤16122 341 ⎪ ⎩=− =− ∫ ⎡1⎤⎡0⎤将 x (0) = ⎢ ⎥ , x (3) = ⎢0⎥ 代入④,⑤, ⎣1⎦⎣ ⎦ 10联立解得: C 1 =由③、④、⑤式得:u * (t ) = 10t − 29 , C 2 = 2 , C 3 = C 4 = 1 9x * (t ) = 5 t 3 −t 2 + t +127 x *(t ) = 5 t 2 − 2t +1 2 9习题 4 已知系统状态方程及初始条件为x =u , x (0) = 1试确定最优控制使下列性能指标取极小值。
最优控制例题讲解
最优控制是指在给定动态系统的控制框架下,通过选择合适的控制策略,使得系统在给定性能指标下达到最优状态。
最优控制问题可以形式化为一个数学优化问题,其中包括一个目标函数和一组约束条件。
下面我们来讲解一个最优控制的例题。
假设有一个无人机需要完成一次空中任务,该任务包括从起点飞行到终点,并在途中避开障碍物。
我们的目标是使得无人机在完成任务的同时,最小化能量消耗,即最小化无人机的飞行时间。
为了解决这个问题,我们可以建立一个动力学模型来描述无人机的运动,例如使用牛顿第二定律和运动学方程。
然后,我们可以引入一个控制变量,如推力或俯仰角,来改变无人机的运动。
在建立动力学模型后,我们可以定义一个目标函数,如飞行时间的积分。
然后,我们可以引入一些约束条件,如无人机的运动范围、速度限制、避障约束等。
接下来,我们可以使用优化算法来求解这个最优控制问题,如动态规划、最优控制理论中的泛函最优化方法(如Pontryagin最大值原理)或者数值优化方法(如非线性规划、强化学习等)。
通过求解最优控制问题,我们可以得到一个最优控制策略,即在每个时间步选择最优的控制输入,以使得无人机在完成任务的同时最小化能量消耗。
然后,我们可以将该控制策略应用于实际的无人机系统中,从而实现最优控制。
需要注意的是,最优控制问题的求解通常需要考虑多个因素,如系统动力学、性能指标、约束条件等,并且可能涉及到复杂的数学推导和计算。
因此,在实际应用中,通常需要结合具体问题的特点,选择合适的建模方法和优化算法来求解最优控制问题。