最优控制理论与系统课后习题答案
- 格式:docx
- 大小:400.67 KB
- 文档页数:13
《现代控制理论》课后习题全部答案(最完整打印版)第⼀章习题答案1-1试求图1-27系统的模拟结构图,并建⽴其状态空间表达式。
解:系统的模拟结构图如下:系统的状态⽅程如下:阿令,则所以,系统的状态空间表达式及输出⽅程表达式为状态变量的状态⽅程,和以电阻上的电压作为输出量的输出⽅程。
解:由图,令,输出量有电路原理可知:既得写成⽮量矩阵形式为:1-4两输⼊,,两输出,的系统,其模拟结构图如图1-30所⽰,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所⽰:1-5系统的动态特性由下列微分⽅程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征⽮量(3)解:A的特征⽅程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征⽅程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两⼦系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所⽰的系统,其中⼦系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所⽰的系统,其中⼦系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分⽅程为试将其⽤离散状态空间表达式表⽰,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第⼆章习题答案2-4⽤三种⽅法计算以下矩阵指数函数。
(2)A=解:第⼀种⽅法:令则,即。

1. ·2.已知二阶系统的状态方程122()(),()()x t x t x t u t ==性能泛函3222221212120111[(3)2(3)][2()4()2()()()]222J x x x t x t x t x t u t dt =+++++⎰求最优控制。
解:把状态方程和性能指标与标准状态方程和标准性能指标比较,可得0,101,02,11,,,,0,010,21,42A B P Q R ⎡⎤⎡⎤⎡⎤⎡⎤=====⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦考虑到()K t 是对称阵,设11121222,(),k k K t k k ⎡⎤=⎢⎥⎣⎦代入黎卡提方程1()()()()()()()()()()()T T K t K t A t A t K t K t B t R t B t K t Q t -=--+-即1112111211121112111212221222122212221222,,,,,0,10,002,12[0,1],0,01,0,,1,1,4,k k k k k k k k k k k k k k k k k k k k ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=--+-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦令上式等号左右端的对应元相等,得211121211122222212222221224k k k k k k k k k =-=-+-=-+-这是一组非线性微分方程。
由边界条件(3)K P =即11121222(3),(3)1,0(3),(3)0,2k k k k ⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦ 最优控制为11112112122212222()()(),()2*[0,1]2()2(),()T u t R B K t X t k k x t k x t k x t k k x t -=-⎡⎤⎡⎤=-=--⎢⎥⎢⎥⎣⎦⎣⎦3. )4.能控的系统状态方程为122()(),()()x t x t x t u t ==这是一种双积分系统,其输出为1()x t ,其输入为()u t ,其传递函数为12()1()()x s G s u s s==其性能泛函为222112201[()2()()()()]2J x t bx t x t ax t u t dt ∞=+++⎰其中220a b ->求最优控制。
广西工学院在职研究生班课程《最优控制》参考答案一、简答题1、系统数学模型、边界条件与目标集、容许控制、性能指标。
2、积分型性能指标,末值型性能指标,综合型性能指标3、控制向量不受约束,且是时间的连续函数。
4、控制向量受到约束,哈密顿函数对控制向量的偏导不存在时。
5、状态调节器问题;输出调节器问题;跟踪问题。
6、不论初始状态和初始决策如何,当把其中的任何一级和状态再作为初始级和初始状态时,其余的决策对此必定也是一个最优控制。
二、计算题(70分)1、解 本题 t f 固定,末态自由。
由题意 ∙+=21x L欧拉方程2=-=∂∂-∂∂∙∙∙x L dtd xL x解得 ()21c t c t x += 由边界条件及横截条件021==∂∂∙=∙x xLf t解得 c1=0 ,c2=0 故所求极值曲线为 ()0=*t x2、解 本题是求解最短曲线问题,可以将性能指标设定为曲线长度函数的积分,当该指标为最小时,所得的曲线即为最短曲线。
根据几何知识,在直角坐标系中弧线元的长度表示为dtdx dt ds x21)()(22∙+=+=设性能指标为 dt J tftox⎰∙+=21由题意可知,tf 固定,末态固定,21xL ∙+=,由欧拉方程0=∂∂-∂∂∙xL dtd xL ,22c x=∙(常量)解得 x(t)=ct+d根据边界条件,可得c=1,d=0,故所求曲线为:()t t x =*3、解 本题为定常系统,tf 固定,末端自由,末值型指标,控制受约束的最后控制问题,可采用极小值原理求解。
由题意知,性能指标为末值型的,即 [])1()1(2)(22x x tf x +=ϕ 令哈密顿函数 H=1211)(x u x λλ++-协态方程022=∂∂-=∙x H λ,2c =λ2112111,c e c x H t+=-=∂∂-=∙λλλλ,横截条件()()1,1211=+=-t e t t λλ 求出 c1=e 1-t +1,c2=1,则有()()1,1211=+=-t e t t λλ极值条件 u ⎩⎨⎧<>-==*0,10,1)sgn()(111λλλt因为()111+=-t e t λ>0,t []1,0∈,故可确定 10,1)(<≤-=*t t u4、解 根据性能指标的形式,可知本题是线性二次型问题,且是有限时间状态调节器问题。

2-5 求通过(0)1x =,(1)2x =,使下列性能泛函为极值的极值曲线*()x t :2(1)ft t J x dt =+⎰解:由题可知,始端和终端均固定,被积函数21L x =+,0L x ∂=∂,2L x x ∂=∂, 2d L x dt x∂⋅=∂ 代入欧拉方程0L d Lx dt x∂∂-⋅=∂∂,可得20x =,即0x =故1x c = 其通解为:12x c t c =+代入边界条件(0)1x =,(1)2x =,求出11c =,21c = 极值曲线为*()1x t t =+2-6 已知状态的初值和终值为(1)4x =,()4f x t =式中f t 自由且f t >1,试求使下列性能泛函达到极小值的极值轨线*()x t :211[2()()]2ft J x t x t dt =+⎰ 解:由题可知,2122L x x =+,()4f t ψ=,()14x =,()4f x t = 欧拉方程:L 0d L x dt x∂∂-=∂∂ 横截条件:()00t x =x ,()()f f x t t ψ=,()0fTt L L xx ψ∂⎛⎫+-= ⎪∂⎝⎭易得到2dxdt= 故12x t c =+ 其通解为:()212x t t c t c =++根据横截条件可得:()()()122121114424f f f f f x c c x t t c t c x t t c ⎧=++=⎪⎪=++=⎨⎪=+=⎪⎩解以上方程组得:12569f t c c =⎧⎪=-⎨⎪=⎩ 还有一组解⎪⎩⎪⎨⎧===12121c c t f (舍去,不符合题意f t >1)将f t ,1c ,2c 代入J 可得3140)3(4)212(5025.2*=-=+=⎰⎰•t dt x x J . 极值轨线为()*269x t t t =-+2-7 设性能泛函为120(1)J x dt =+⎰求在边界条件(0)0x =,(1)x 自由情况下,使性能泛函取极值的极值轨线*()x t 。
最优控制习题答案1.设系统方程及初始条件为⎩⎨⎧=+-=)()()(2)()(1211t x t x t u t x t x,⎩⎨⎧==0)0(1)(21x t x 。
约束5.1)(≤t u 。
若系统终态)(f t x 自由,利用连续系统极大值原理求)(*t u 性能指标,)3(2x J =取最小值。
解:2.设一阶离散时间系统为)()()1(k u k x k x +=+,初值2)0(=x ,性能指标为∑=+=2022)(21)2(k k u x J ,试用离散系统最小值原理求解最优控制序列:)2(),1(),0(u u u ,使J 取极小值。
解:3.软着落、空对空导弹的拦截问题、防空拦截问题。
解答:4.设离散系统状态方程为)(2.00)(101.01)1(k u k x k x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=+,已知边界条件⎥⎦⎤⎢⎣⎡=01)0(x ,⎥⎦⎤⎢⎣⎡=00)1(x 。
试用离散系统最小值原理求最优控制序列,使性能指标∑==102)(03.0k k u J 取极小值,并求出最优的曲线序列。
解:属于控制无约束,N 不变,终端固定的离散最优控制问题,构造离散哈密尔顿函数)](2.0)()[1()](1.0)()[1()(03.0)(222112k u k x k k x k x k k u k H ++++++=λλ其中)1(),1(21++k k λλ为给定拉个朗日乘子序列,由伴随方程:)1()()(111+=∂∂=k k x H k λλ,)1()1(1.0)()(2122+++=∂∂=k k k x Hk λλλ得出 ⎩⎨⎧+==+==)2()2(1.0)1(),2()1()1()1(1.0)0(),1()0(2121121211λλλλλλλλλλ,由极值条件⎪⎪⎩⎪⎪⎨⎧>=∂∂=++=∂∂006.0)(0)1(2.0)(06.0)(222k u H k k u k u Hλ极小)1(310)(2+-=k k u λ可使min )(=k H ,令k=0和k=1的⎪⎩⎪⎨⎧-=-=)2(310)1(*)1(310)0(*22λλu u ,)(k u 带入状态方程并令k=0和1得到: 5.求泛函dtx x x x J ⎰++=102221211],[ 满足边界条件π===-=)3(,0)0(,0)3(,3)0(2211x x x x 和约束条件36221=+t x 的极值曲线。

1. 已知二阶系统的状态方程122()(),()()x t x t x t u t ==性能泛函3222221212120111[(3)2(3)][2()4()2()()()]222J x x x t x t x t x t u t dt =+++++⎰求最优控制。
解:把状态方程和性能指标与标准状态方程和标准性能指标比较,可得0,101,02,11,,,,0,010,21,42A B P Q R ⎡⎤⎡⎤⎡⎤⎡⎤=====⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦考虑到()K t 是对称阵,设11121222,(),k k K t k k ⎡⎤=⎢⎥⎣⎦代入黎卡提方程1()()()()()()()()()()()T T K t K t A t A t K t K t B t R t B t K t Q t -=--+-即1112111211121112111212221222122212221222,,,,,0,10,002,12[0,1],0,01,0,,1,1,4,k k k k k k k k k k k k k k k k k k k k ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=--+-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦令上式等号左右端的对应元相等,得211121211122222212222221224k k k k k k k k k =-=-+-=-+-这是一组非线性微分方程。
由边界条件(3)K P =即11121222(3),(3)1,0(3),(3)0,2k k k k ⎡⎤⎡⎤=⎢⎥⎢⎥⎣⎦⎣⎦ 最优控制为11112112122212222()()(),()2*[0,1]2()2(),()T u t R B K t X t k k x t k x t k x t k k x t -=-⎡⎤⎡⎤=-=--⎢⎥⎢⎥⎣⎦⎣⎦2. 能控的系统状态方程为122()(),()()x t x t x t u t ==这是一种双积分系统,其输出为1()x t ,其输入为()u t ,其传递函数为12()1()()x s G s u s s==其性能泛函为222112201[()2()()()()]2J x t bx t x t ax t u t dt ∞=+++⎰其中220a b ->求最优控制。
最优控制习题及参考答案6212最优控制习题及参考答案习题 1求通过 x (0) = 1 , x (1) = 2 ,使下列性能指标为极值的曲线:t f J = ∫(x2 +1)dt t 0解: 由已知条件知: t 0=0 , t f= 1d由欧拉方程得:(2x ) = 0dtx = C 1x = C 1t + C 2将 x (0) = 1,x (1) = 2 代入,有:C 2 = 1,C 1 = 1得极值轨线: x *(t ) = t +1习题 2求性能指标:J = ∫ 1(x 2 +1)dt在边界条件 x (0) = 0 , x (1) 是自由情况下的极值曲线。
解: 由上题得:x * (t ) = C t + Cx * (t )63x f由 x (0) = 0 得: C 2= 0∂L由 ∂xt =tf= 2x (t f ) = 2C 1 t =t = 0t0 1于是: x *(t ) = 0【分析讨论】对于任意的 x (0) = x,x (1)自由。
6421∫ ⎩λ =有: C = x , C = 0 ,即: x *(t ) = x其几何意义: x (1) 自由意味着终点在虚线上任意点。
习题 3已知系统的状态方程为:x 1 (t ) = x 2 (t ), x 2 (t ) = u (t )边界条件为: x 1(0) = x 2(0) = 1 , x 1(3)= x 2(3) = 0 ,31 试求使性能指标 J =u 2(t )dt 2取极小值的最优控制 u *(t ) 以及最优轨线 x *(t ) 。
⎡ x ⎤解: 由已知条件知: f = ⎢ 2⎥⎢⎣ u ⎥⎦Hamiton 函数: H = L + λTfH = 1u 2+ λ x + λ u⎧λ = 0由协态方程: ⎨12121 2 2⎧λ = C① 得: ⎨1 1⎩λ2 = −C 1t + C2 ② ∂H由控制方程:∂u= u + λ2 = 0 得: u = −λ2= C 1t − C 2③由状态方程:x2 = u = C1t −C2得:x (t) = 1 C t2 −C t + C ④2 2由状态方程:x1 = x21 2 3得:x (t) = 1 C t3 −1 C t 2 + C t + C ⑤1 6 12 23 465661⎪⎩=− ∫⎡1⎤ ⎡0⎤将x (0) = ⎢ ⎢,x (3) = ⎢0⎢代入④,⑤, ⎣1⎦⎣ ⎦ 10联立解得: C 1 =由③、④、⑤式得:u * (t ) = 10t − 29,C 2 = 2 , C3=C 4 =1 9x * (t ) = 5 t 3 −t 2+ t +1 27 x *(t ) = 5 t 2 − 2t +1 29习题 4已知系统状态方程及初始条件为x =u , x (0) = 1试确定最优控制使下列性能指标取极小值。
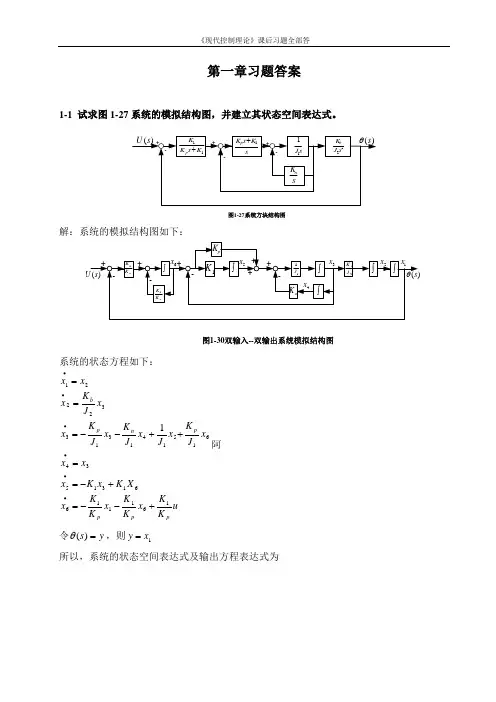
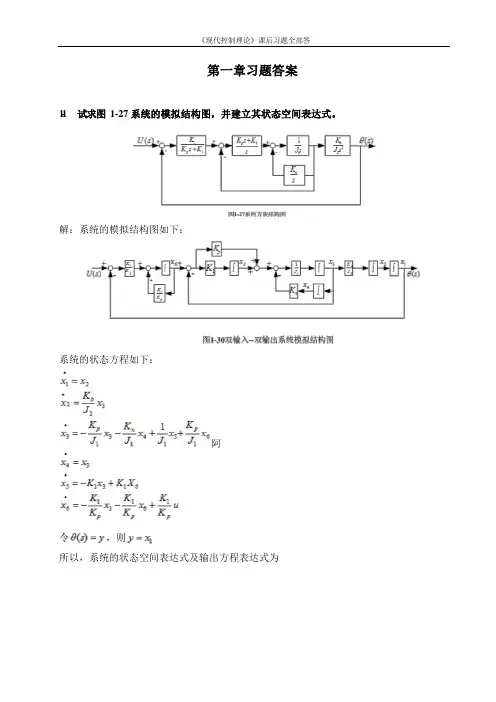
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
现代控制理论》课后习题答案(完整版)试求图1-27所示系统的状态空间表达式和输出方程表达式。
解:系统的模拟结构图如下:image.png]()根据模拟结构图,可以列出系统的状态方程:begin{cases} \dot{x}_1 = -2x_1 + 3x_2 + u \\ \dot{x}_2 = -x_1 + 2x_2 \end{cases}$$其中,$u$为输入量,$x_1$和$x_2$为状态变量。
将状态方程写成矩阵形式:begin{bmatrix} \dot{x}_1 \\ \dot{x}_2 \end{bmatrix} =\begin{bmatrix} -2 & 3 \\ -1 & 2 \end{bmatrix} \begin{bmatrix}x_1 \\ x_2 \end{bmatrix} + \begin{bmatrix} 1 \\ 0 \end{bmatrix} u$$系统的输出方程为:y = \begin{bmatrix} 1 & 0 \end{bmatrix} \begin{bmatrix}x_1 \\ x_2 \end{bmatrix}$$因此,系统的状态空间表达式为:begin{cases} \dot{x} = Ax + Bu \\ y = Cx \end{cases}$$其中。
A = \begin{bmatrix} -2 & 3 \\ -1 & 2 \end{bmatrix}。
B =\begin{bmatrix} 1 \\ 0 \end{bmatrix}。
C = \begin{bmatrix} 1 & 0 \end{bmatrix}$$输出方程表达式为:y = \begin{bmatrix} 1 & 0 \end{bmatrix} \begin{bmatrix}x_1 \\ x_2 \end{bmatrix}$$因此,系统的状态空间表达式和输出方程表达式为:begin{cases} \dot{x} = \begin{bmatrix} -2 & 3 \\ -1 & 2\end{bmatrix} x + \begin{bmatrix} 1 \\ 0 \end{bmatrix} u \\ y = \begin{bmatrix} 1 & 0 \end{bmatrix} x \end{cases}$$对于下面的文章,我们首先删除了明显有问题的段落,然后进行了小幅度的改写和格式修正。
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。