基于英飞凌单片机XC886 CAN控制器
- 格式:pdf
- 大小:2.30 MB
- 文档页数:92
锂离子电池组的主动充电平衡法位于慕尼黑的英飞凌科技公司汽车系统工程部门最近接到一项开发E-Cart的任务。
E-Cart是一种可驾驶的车辆,主要用于演示混合动力汽车的电气性能。
该车将采用一组庞大的锂离子电池组提供动力,当时开发人员就意识到对其进行带充电平衡的电池管理是绝对必要的。
这种情况下必须采用在各节电池之间进行主动能量转移的方式来代替传统的简单充电平衡方案。
他们开发的主动充电平衡系统在材料成本与被动方案相当的情况下能提供更优秀的性能(见图1)。
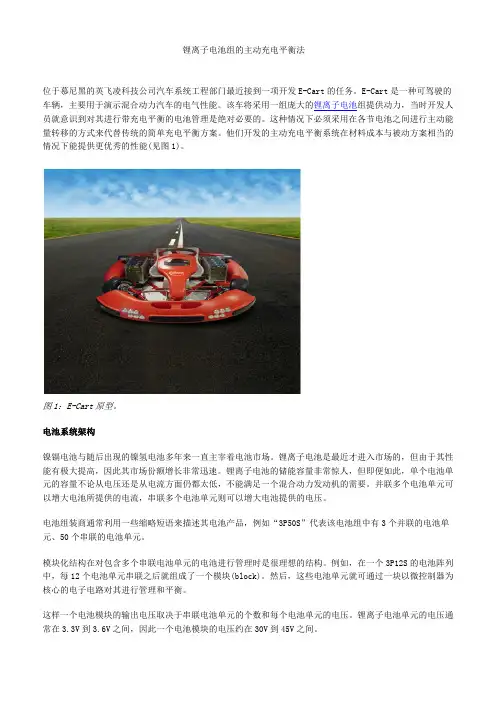
图1:E-Cart原型。
电池系统架构镍镉电池与随后出现的镍氢电池多年来一直主宰着电池市场。
锂离子电池是最近才进入市场的,但由于其性能有极大提高,因此其市场份额增长非常迅速。
锂离子电池的储能容量非常惊人,但即便如此,单个电池单元的容量不论从电压还是从电流方面仍都太低,不能满足一个混合动力发动机的需要。
并联多个电池单元可以增大电池所提供的电流,串联多个电池单元则可以增大电池提供的电压。
电池组装商通常利用一些缩略短语来描述其电池产品,例如“3P50S”代表该电池组中有3个并联的电池单元、50个串联的电池单元。
模块化结构在对包含多个串联电池单元的电池进行管理时是很理想的结构。
例如,在一个3P12S的电池阵列中,每12个电池单元串联之后就组成了一个模块(block)。
然后,这些电池单元就可通过一块以微控制器为核心的电子电路对其进行管理和平衡。
这样一个电池模块的输出电压取决于串联电池单元的个数和每个电池单元的电压。
锂离子电池单元的电压通常在3.3V到3.6V之间,因此一个电池模块的电压约在30V到45V之间。
混合动力车的驱动需要450V左右的直流电源电压。
为了根据充电状态来补偿电池单元电压的变化,比较合适的做法是在电池组和发动机之间连接一个DC-DC转换器。
这个转换器还可以限制电池组输出的电流。
为确保DC-DC转换器工作在最佳状态,要求电池组电压在150V到300V之间。
新手导1. 82.163.32声明:英飞凌社区应用笔记部分资料内容来源英飞凌社区请来信告知。
本人尊重原创作者。
2012/6新手导航中文版位单片机介绍位单片机介绍位单片机介绍凌社区热心网友奉献资料整理和网络,应用笔记心得整理,内容仅供参考。
如果侵犯Infineon (MCU 新手门篇)英飞凌社区新导航笔记 Ken2012/6/3 果侵犯你的版权,新手入社区新手关于英飞凌总部位于德国纽必堡的英飞凌科技股份公司,为现代社会的三大科技挑战领域——高能效、移动性和安全性提供半导体和系统解决方案。
2010财年(截止到9月30日),公司实现销售额40亿欧元,在全球拥有约26,000名雇员。
英飞凌科技公司的业务遍及全球,在美国苗必达、亚太地区的新加坡和日本东京等地拥有分支机构。
英飞凌公司目前在法兰克福股票交易所(股票代码:IFX)和美国柜台交易市场(OTCQX)International Premier(股票代号:IFNNY)挂牌上市英飞凌在中国英飞凌科技股份公司于1995年正式进入中国市场。
自1996年在无锡建立第一家企业以来,英飞凌的业务取得非常迅速的增长,在中国拥有1300多名员工,已经成为英飞凌亚太乃至全球业务发展的重要推动力。
英飞凌在中国建立了涵盖研发、生产、销售、市场、技术支持等在内的完整的产业链,并在销售、技术研发、人才培养等方面与国内领先的企业、高等院校开展了深入的合作。
☺☞Infineon XC800系列8位元MCU(8位单片机)超级耐高温150℃工业级 8位MCU XC800专为汽车应用设计XC800 150℃系列是汽车产品的理想之选,例如涡轮增压器、发动机风扇、节流阀或阀控制装置、EPS、燃料/燃油传感器以及水/机油/燃油泵等。
潜在的工业应用包括加热控制装置、锅炉系统或电机内部的电子控制系统等。
AEC-Q100是由汽车电子设备委员会(AEC)制定的可靠性压力测试标准。
测试表明,英飞凌全新推出的系列高温微控制器,经过符合AEC-Q100 Grade 0 (-40℃至150℃)标准要求的测试和认证。
新手导1. 82.163.32声明:英飞凌社区应用笔记部分资料内容来源英飞凌社区请来信告知。
本人尊重原创作者。
2012/6新手导航中文版位单片机介绍位单片机介绍位单片机介绍凌社区热心网友奉献资料整理和网络,应用笔记心得整理,内容仅供参考。
如果侵犯Infineon (MCU 新手门篇)英飞凌社区新导航笔记 Ken2012/6/3 果侵犯你的版权,新手入社区新手关于英飞凌总部位于德国纽必堡的英飞凌科技股份公司,为现代社会的三大科技挑战领域——高能效、移动性和安全性提供半导体和系统解决方案。
2010财年(截止到9月30日),公司实现销售额40亿欧元,在全球拥有约26,000名雇员。
英飞凌科技公司的业务遍及全球,在美国苗必达、亚太地区的新加坡和日本东京等地拥有分支机构。
英飞凌公司目前在法兰克福股票交易所(股票代码:IFX)和美国柜台交易市场(OTCQX)International Premier(股票代号:IFNNY)挂牌上市英飞凌在中国英飞凌科技股份公司于1995年正式进入中国市场。
自1996年在无锡建立第一家企业以来,英飞凌的业务取得非常迅速的增长,在中国拥有1300多名员工,已经成为英飞凌亚太乃至全球业务发展的重要推动力。
英飞凌在中国建立了涵盖研发、生产、销售、市场、技术支持等在内的完整的产业链,并在销售、技术研发、人才培养等方面与国内领先的企业、高等院校开展了深入的合作。
☺☞Infineon XC800系列8位元MCU(8位单片机)超级耐高温150℃工业级 8位MCU XC800专为汽车应用设计XC800 150℃系列是汽车产品的理想之选,例如涡轮增压器、发动机风扇、节流阀或阀控制装置、EPS、燃料/燃油传感器以及水/机油/燃油泵等。
潜在的工业应用包括加热控制装置、锅炉系统或电机内部的电子控制系统等。
AEC-Q100是由汽车电子设备委员会(AEC)制定的可靠性压力测试标准。
测试表明,英飞凌全新推出的系列高温微控制器,经过符合AEC-Q100 Grade 0 (-40℃至150℃)标准要求的测试和认证。
基于英飞凌产品的汽车EPS方案介绍英飞凌infineonic EPS摘要随着对车辆的转向性能以及能耗标准的不断提高,作为一种有效的性能改进和节能手段,电动助力转向系统(EPS)正替代传统的液压助力转向系统(HPS)而被越来越多的中小型汽车所采用。
本文将从北京晶川电子技术发展有限责任公司和英飞凌科技公司合作开发的一个汽车电动助力转向系统参考方案出发,介绍EPS的一般结构及其电控单元的一般原理。
在此基础上本文将着重介绍英飞凌对于EPS电控单元的理解并详细介绍该单元基于英飞凌产品上的实现方案。
通过对所用器件的说明我们将分析该方案的突出特点。
最后,本文将分析EPS 电控单元的发展趋势并简介英飞凌公司所采取的与之对应的解决方案。
前言随着汽车保有量的不断增长,汽车排放对环境的污染被加以越来越多的重视,而日益严格的排放标准的不断推出更使环保成为汽车必须要达成的一个指标。
此外,随着汽车消费的不断成熟,消费者也越来越关注汽车的各种功能性的内在指标。
作为传统液压助力转向系统(Hydraulic Power Steering - HPS)和电动液压助力转向系统(Electro-Hydraulic Power Steering – EHPS)技术的替代者,电动助力转向系统(Electric Power Steering - HPS)正由于其具有的优点而被应用于越来越多的车辆中。
下表(表一)是世界著名的咨询公司Strategy Analytics对中国EPS市场的预测,从中我们可以明显地看出这种不断增长的趋势,预计在2010-2017年期间中国的EPS市场的年复合增长率将达到16.9%。
表一2010-2017中国EPS市场预测(千套)摘自Strategy Analytics市场报告《AUTOMOTIVE SEMICONDUCTOR DEMAND FORECAST 2008 - 2017》2010年10月版这种不断增长的市场趋势是由于EPS系统本身具有的诸多优点所决定的,这主要表现在:1、EPS能在各种行驶工况下提供最佳助力,减小扰动,改善汽车的转向特性,提高汽车高速行驶时的转向稳定性,进而提高汽车的主动安全性。
总线式船用应急车钟设计刘冬森【摘要】船用电子应急车钟是船上驾驶室主控车令控制器的备份控制设备.在应急情况下,通过相应按钮或选择开关操作向“机舱”和“集控室”发送用车指令,保证船舶正常行驶.应急车钟由发送器,复示器和接收器三部分组成.具有驾驶室、集控室和机舱三地传递显示车钟命令、报警等功能.系统以单片机为控制核心,发送器、复示器和接收器间采用CAN总线通讯,具有配置灵活和比老式车钟的电缆芯线少、节约造船费用等优点.【期刊名称】《船电技术》【年(卷),期】2015(035)006【总页数】6页(P54-59)【关键词】应急车钟;单片机;CAN总线【作者】刘冬森【作者单位】安徽省阜阳市地方海事局,安徽阜阳236000【正文语种】中文【中图分类】TP273当前制造的船舶设备大都采用了自动化的控制手段。
计算机技术的飞速发展及广泛应用,为船舶自动化开辟了更广泛的发展领域,采用微机控制的系统成为一种必然的发展趋势。
船用车钟作为船舶操纵信号设备,是船舶主机遥控系统的主要组成部分,是现代化船舶机舱必不可少的设备之一,应急车钟是船舶主车钟的冗余设备,用于船舶驾驶室、集控室、机舱三地间的通信和联系。
当船舶遇到特殊紧急情况,如主控车令控制器损坏或失灵等情况,就得启动应急车令的通信,以实现由“驾驶控制室”向“机舱”和“集控室”等多个控制部位的相互间通信,使船舶免于失控,能正常安全行驶。
1.1 系统的总体机构系统由驾驶台发送器,集控室以及机舱的复示器、接收器三个独立的单元组成,在集控室操作面板上转换开关进行复示器与接收器的切换,各个单元都由单片机控制,由单片机内嵌的CAN控制器(MultiCAN)通过CAN总线相连,同时驾驶室的发送器通过RS485总线连接着VDR(航行参数记录仪),各单元再分别由24 V电源供电。
系统的基本框图如图1所示。
1.2 系统的主要功能系统设计有正车全速、正车半速、正车慢速、正车微速、停车、备车、完车、倒车微速、倒车慢速、倒车半速、倒车全速11个档位来指示主机的转速和转向。

基于XC886单片机的魔方机器人设计作者:郭力峰,揭宗昌,蔡泽辉来源:《电脑知识与技术》2011年第23期摘要:该文介绍了一种基于英飞凌公司XC886单片机的新型的可重构模块化机器人(多变魔方机器人),它同时拥有自重构、自组装和群体机器人的功能。
其每个独立模块都可以自主移动并与其他模块自组装成一个整体,从而被配置成各种不同形态,实现变形。
对于基于XC886单片机的模仿机器人系统的硬件机械结构、控制板结构和软件结构都给出了详细的设计。
实验结果表明基于XC886单片机的魔方机器人系统运行稳定,处理速度快并且鲁棒性强。
关键词:可重构;模块化机器人;自组装;群体机器人;XC886中图分类号:TP242.6文献标识码:A文章编号:1009-3044(2011)23-5701-03Design of Changeful Magic Cube Robots Based on XC886GUO Li-feng1, JIE Zong-chang2, CAI Ze-hui3(1.School of Information and Electrical Engineering, China University of Mining and Technology, Xuzhou 221116, China; 2.School of Computer Science and Technology, China University of Mining and Technology, Xuzhou 221116, China)Abstract: This paper presents a novel reconfigurable modular robots (Changeful Magic Cube Robots) that also shares characteristics with self-reconfigurable and self-assembly and swarm robots baede on the Infineon XC886 microcontroller. Each module of Changeful Magic Cube Robots can be free to move and can be self-assembled to form a magic cube's structure with the other modules. These independent modules can be configured into various different forms to achieve deformation. The composing of hardware, the structure of software and the principle of system is introduced detailed in this paper. Based on the Experiment, the XC886 chip is proved to be efficient and robust.Key words: reconfigurable; modular robotics; self-assembly; collective robots; XC886今年来,随着机器人技术在日常生活和生产实践中的不断应用,人们对机器人技术的要求也不断提高,单机器人系统在信息的获取、处理以及实时控制能力等方面的局限性开始显现。

英飞凌单片机选型英飞凌半导体微控制器(MCU)具有8位、16位、32位全系列产品。
实现高性能的电机驱动控制,在严酷环境下(高温、EMI、振动)具有极高的可靠性。
一.8位单片机(XC800系列)图1-1 XC800系列单片机命名规则上图的外设类型中,C指CAN总线通信模块,L指LIN总线通信,M指片上集成的快速乘除法模块,主要是为了方便乘除法运算,提高单片机运算速度和控制质量。
1.1 XC864系列XC864系列片内Flash,可以防止用户代码被读出,保护知识产权,同时具有编程和擦除保护防止数据丢失,还支持在应用编程(IAP)和在系统编程(ISP)。
另外,还有一个产生PWM信号用于电机控制的输入捕捉/比较单元(CCU6),一个10位A/D转换单元,一个片上调试支持单元(OCDS),大多数器件还有由扩展UART支持的低成本串行本地通信网络(LIN)和LIN的低层次驱动。
片内集成10M晶振和锁相环(PLL)。
1.2 XC866系列XC866系列的基本特性与XC864相似,改进的地方有外部端口数目增加,ADC的转换通道由4增为8,片上Flash存储单元分为程序存储单元(P-Flash)和数据存储单元(D-Flash),其大小也有多种可选。
可用片内10M晶振或外接4-12M晶振。
表1-2 XC866系列器件参数表1.3 XC886系列XC886的功能与XC864相似,改进的地方有,增加外部端口的数目,增加CAN通信功能,增加乘除法单元(MDU)以增强实时运算和控制能力,增加协调旋转数字计算器/矢量计算(CORDIC)用来协调计算三角、线性和混合的高速运算,增加16位定时/计数器Timer21,另外增加一个UART通信接口。
此外在存储器方面,Boot ROM由8K增加的12K,XRAM 由512B增加到1.5K,Flash也有24K和32K两种可选。
片内9.6M晶振或外接4-12M晶振。
表1-3 XC886系列器件参数表1.4 XC888系列XC888的功能和XC886相同,只是外部I/O端口的数目由34增加到48,相应地外部引脚的数目由48增加到64。
汽车车门控制系统的LIN总线通信模块设计0 引言随着汽车业的飞速发展,汽车电控系统的配置不断升级,使得车辆上的电子元件越来越多,其相互连接的网络结构也越来越复杂。
过去所采用的电缆连接方式所带来的庞大布线负担,容易造成车体过重和线路的磨损老化。
在这种情况下,就需要引入标准的总线技术,从而降低车身重量,同时提高各个电控元件之间的通信可靠性。
上世纪80年代,根据车用通信网络在不同控制层面的不同功能要求,SAE (Societv ofAuto-mobile Engineering)将其分为A,B,C三类。
其中A类为低速网,数据传输速率通常为1~10kb/s,LIN总线通信网络就属于此类。
LIN总线一般应用于不需要高性能及带宽和复杂性较大的低端系统,如车门控制模块、座椅调节、车灯控制和空调系统中传感器和执行器之间的通信。
由于其LIN总线成本较低,也可以独立用于不是特别复杂的车身控制网络中。
1 LIN总线协议简介LIN协议标准于1998年由Audi、BMW、Mo-torola、Daimlerehrysler、VCT、V olvo和V olkswa-gen等七家公司在A类网已有协议的基础上联合提出。
LIN总线在当今汽车电子的网络结构中被广泛使用,它基于通用的UART/SCI接口,使用单线信号传输,从节点无需晶振或陶瓷振荡器就能实现自同步,因此成本低廉。
LIN总线网络采用单主多从模式,图1所示是UN总线网络的结构示意图,它由一个主节点和一个或若干个从节点组成,不需要总线仲裁。
LIN总线协议基于ISO参考模型中的物理层,数据链路层采用NRZ (Not Re-turn Zero)编码方式,电平分为隐性电平(‘1’)和显性电平(‘0’)。
1.1 物理层LIN总线一般采用单总线(12 V)串行通讯,总线长度最大可达到40 m,传输速率最高可达到20 Kb/s,通常使用2.4Kb/s、9.6 Kb/s和19.2 Kb/s这三个波特率进行数据传输。
54 •电子技术与软件工程 Electronic Technology & Software Engineering软件开发• Software Development【关键词】XC886芯片 BootLoader 远程升级 CAN 总线在现代控制数字技术不断迅猛发展的当下,嵌入式控制系统被越来越广泛的应用在工业领域,嵌入式操作系统经常被安装在自然环境极其恶劣的区域,亟需实现系统远程加载。
基于XC886芯片的在线升级软件设计文/张琪 杨建成 于宗洋CAN 总线作为一种国际标准的现场总线,具有出众的性价比和高可靠性,因此通过CAN 总线对各节点芯片进行在线升级,成为一种简单易行且稳定可靠的方式。
本项目提出一种基于CAN 总线的分布式嵌入系统升级方案,实现多点或单点系统的升级。
项目根据嵌入式处理系统存储结构的特殊性和主流的软件升级原理,建立了一套通过PC 机控制远程节点软件升级的系统。
1 工作原理本研究采用的嵌入式芯片采用Infineon 公司的XC886芯片,程序软件升级采用下载模式。
主要思路是使用PC 平台,与嵌入式芯片驻留程序通讯。
系统软件分为PC 平台和硬件端底层引导程序(BootLoader ),PC 平台负责将需要加载的更新程序转化为要求格式,BootLoader 将CAN 总线发来的数据烧写到FLASH 存储区内。
先通过JTAG 口将BootLoader 烧写到FLASH ,然后弃用JTAG 。
在后续使用过程中,芯片上电后按ROM 区地址顺序执行,即先执行BootLoader ,底层程序负责接收PC 端控制命令,决定是否有目标文件更新任务:判断有,将CAN 总线上发送的用户文件接收并通过Flash 缓存固化到芯片ROM 区;判断无,运行硬件端用户程序区。
2 过程实现控制核心模块使用中断接收PC 平台发来的消息,通过ID 号分辨消息是命令还是文件传输。
该模块是核心部分,负责与PC 平台进行通讯,传输和接收数据;响应PC 平台发送的命令,完成命令功能,处理接收数据。
利用XC866 8位微控制器实现空调室外机风扇控制
钱伟喆
【期刊名称】《电子产品世界》
【年(卷),期】2010(017)005
【摘要】本文提出了一种利用英飞凌8位微控制器XC866对空调室外机风扇进行简化正弦控制的方案.室外机风扇需要在不同的气候条件下可靠地启动和运行.在室外遭遇强风的情况下,可能会迫使风扇叶片反向旋转.英飞凌的解决方案首先对风扇叶片实施制动,然后采用根据初始运行速度计算出来的更强功率启动风扇.实践证明,正弦控制相对于传统的梯形控制,可更有效地降低噪声.与此同时,这种简化方法还不受电机参数的影响,因此适用于各种型号的风扇.这有利于缩短开发周期,提高生产的便利性.
【总页数】2页(P55-56)
【作者】钱伟喆
【作者单位】英飞凌科技股份公司
【正文语种】中文
【相关文献】
1.利用MAXQ2000微控制器实现快速傅里叶变换 [J], Ueli
Eschmann;Dipl.EI.Ing.ETH
2.利用XC2300系列微控制器实现CAN网络安全 [J], Hagen Platzdasch
3.利用RS422串口实现微控制器程序在线升级的方法 [J], 杨光海;彭文渊;张川;公丕华;王海;徐丹;吴晔
4.利用超低功耗微控制器实现智能LED照明控制 [J], Hubert Pecze
5.利用超低功耗微控制器实现智能LED照明控制 [J], Hubert Pecze;
因版权原因,仅展示原文概要,查看原文内容请购买。
控制器局域网络(CAN)控制器英飞凌XC800系列单片机写在前面本篇内容为英飞凌科技有限公司(Infineon Technologies CO., LTD.)的XC800系列单片机的基础篇之一。
本篇所述内容为XC800系列单片机中的XC886/888和XC878子系列提供CAN外设。
如无特别说明,所指的产品为上述XC800子系列单片机中的XC886CLM 单片机。
由于后续芯片会有更多的改进/增加措施,如需要关注其它产品,需要再结合相应的产品数据手册(Data Sheet)和用户手册(User Manual)!由于版本更新等原因,可能会出现各版本间的资料说法有略微差异,请以英飞凌网站公布的最新英文版本的产品数据手册(Data Sheet)和用户手册(User Manual)为准!本篇内容CAN总线原理Infineon MultiCANMultiCAN的组成MultiCAN的运用实战练习:LED灯控实验(报文的发送/接收)CAN总线原理BOSCH CANCAN(Controller Area Network)为局域网控制总线,符合国际标准ISO11898。
CAN总线最初是由德国的BOSCH公司为汽车的监测、控制系统设计的,属于总线式通讯网络。
CAN总线规范了任意两个CAN节点之间的兼容性,包括电气特性及数据解释协议。
CAN协议分为两层:物理层和数据链路层。
物理层用于决定实际位传送过程中的电气特性。
在同一网络中,所有节点的物理层必须保持一致,但可以采用不同方式的物理层。
CAN的数据链路层功能则包括帧组织形式、总线仲裁和检错、错误报告及处理、对要发送信息的确认以及确认接收信息并为应用层提供接口等。
其主要特点是:能够以多主方式工作,网络上的任意节点均可成为主节点,并可向其它节点传送信息。
非破坏性总线仲裁和错误界定,总线冲突的解决和出错界定可由控制器自动完成,且能区分暂时和永久性故障并自动关闭故障节点。
CAN节点可被设定为不同的发送优先级。
以满足不同的实时要求。
采用差分驱动,可在高噪声干扰环境下使用。
CAN总线原理(续)CAN总线是一个面向报文的协议报文的内容是界定的每一个报文都有自己独特的识别标志 节点的数目没有限制CAN总线网络是容易升级的模块化网络Infineon XC800单片机所带的CAN称为MultiCANInfineon的MultiCAN为BOSCH CAN的超集,并在此基础上扩充了一些特殊功能。
MultiCAN模块包含大于两个的全CAN功能节点(XC800系列的产品含两个CAN节点),每个节点可独立工作或者通过网关功能交换数据和远程帧。
所有的CAN节点共用一套报文对象,每个报文对象可被独立分配给任意一个有效的CAN节点之一。
每个CAN节点都可以接收和发送带11位标识符的标准帧和带29位标识符的扩展帧。
MultiCAN节点仅将帧存储到分配给该节点列表的报文对象中,且仅发送属于该报文对象列表的报文。
功能强大,由命令驱动的列表控制器执行所以报文对象列表操作。
与ISO11898标准兼容根据CAN V2.0B Active技术规范确定CAN功能每个CAN节点都有专用控制寄存器数据传送速率高达1Mbit/sCAN总线位时序分析和由帧计数器实现的波特率检测功能 先进的验收滤波功能先进的报文对象功能先进的数据管理先进的中断处理模块组成MultiCAN模块结构框图MultiCAN每个CAN节点可单独配制并运行,不依赖于其他CAN节点。
每个CAN节点都配有一套独立的SFR寄存器,对该节点进行控制和监控。
节点控制在同步段(T Sync)进行发射和接收时间基准之间的相位同步。
同步段长度总为一个t q。
传播段(T Prop)考虑CAN总线上的发射输出驱动器和收发电路的物理传播延迟。
对于工作冲突检测机制来讲,T Prop必须等于所有的传播延迟量的总和舍入到t q的整数倍之后,再乘以2所得的值。
采样点之前和之后的相位缓冲段1和2(T b1,T b2)用于补偿同步段中检测到的发射和接收之间的时钟相位失配。
位时间的计算重新同步阶段所允许的时间单元的最大值由位域NBTRx.SJW定义。
传播段和相位缓冲段1结合成参数T Seg1,由NBTRx.TSEG1中的值定义,ISO 标准要求其最小值为3个时间单元。
参数T Seg2,由NBTRx.TSEG2 的值定义,包含了相位缓冲段2,ISO标准要求其最小值为2个时间单元。
根据ISO标准,CAN位时间,是T Sync,T Seg1和T Seg2的总和,必须不少于8个时间单元。
t q=(BRP+1)/f CAN如果DIV8 = 0=8×(BRP+1)/f CAN如果DIV8 = 1T Sync=1×t qT Seg1=(TSEG1+1)×t q(最小:3t q)T Seg2=(TSEG2+1)×t q(最小:2t q)位时间=T Sync+T Seg1+ T Seg2(最小:8t q)位时间的计算(续)为了补偿不同CAN控制器之间的时钟相移,CAN控制器必须在从隐性到显性总线电平的任意边沿进行同步。
如果硬同步被使能(在一帧的开始),在同步段重新开始位时间。
否则,重新同步跳转宽度TSJW定义最大数目的时间单元,重新同步操作可能缩短或拉长位时间。
SJW的值由位域NBTRx.SJW定义。
T SJW=(SJW + 1)×t qT Seg1≥T SJW+ T PropT Seg2≥T SJWf CAN相对容差由相位缓冲段和重新同步跳转宽度决定。
df CAN≤min( T b1,T b2)/2×(13 ×位时间-T b2)且df CAN≤T SJW/20 ×位时间必须在复位NCRx.INIT之前,将有效的位时序写入到寄存器NBTR中,在位E置位(使能配置更改)的情况下,才可以对寄存器NBTRx 进行写操作。
错误处理单元CAN节点x的错误处理单元负责对CAN器件进行故障界定。
该单元有2个计数器,接收错误计数器NECNTx.REC和发送错误计数器NECNTx.TEC,这两个计数器根据来自位流处理器的命令相应地增加和减少。
如果在发送操作的同时,位流处理器自身检测到了一个错误,发送错误计数器增加8。
当一个外部CAN节点因为错误帧产生而报告一个错误情况,节点计数器增1。
对于错误分析、出错的报文传送方向和识别到传送错误的节点,由相关的CAN节点x的寄存器NECNTx指示。
根据错误计数器中的值,CAN节点被设置为如下状态:“错误激活”“错误认可”和“总线关闭”。
如果两个错误计数器的值都低于“错误认可”界限128,CAN处于错误激活状态。
如果至少两者之一等于或者大于128,CAN节点处于错误认可状态。
如果发送错误计数器的值等于或者大于“总线关闭”界限256,“总线关闭”状态被激活,并由标志符NSRx.BOFF报告该状态。
器件一直保持在该状态,直到完成“总线关闭”恢复过程为止。
此外,当至少一个错误计数器等于或大于位域NECNTx.EWRNLVL中定义的错误警告值时,NSRx.EWRN被置位。
如果两个错误计数器的值再次降到错误警告值以下,NSRx.EWRN被复位。
每个CAN 节点都配有4 个中断源来产生中断请求:成功发送/接收一帧带最近错误码的CAN 协议错误出现警告条件:发送/接收错误计数器达到警告界限,总线关闭状态改变,出现列表长度错误,或者出现列表对象错误帧计数器溢出除了由硬件产生中断,也可通过寄存器MITR 由软件触发中断。
向位域MITR.IT的位n写1,将在相应的中断输出线CANSRCm上产生中断请求信号。
当写访问位域MITR.IT时,如果多于一位被置位,则导致相应的多条中断输出线CANSRCm被同时激活。
报文的列表结构MultiCAN模块的报文对象被组织为双链列表,在该列表结构中,每个报文对象都有两个指针,一个指向列表中前一个报文对象,另一个指向列表中的后一个报文对象。
MultiCAN模块提供8个列表,每个报文对象分配给其中之一。
报文的列表结构(续)位域LIST.BEGIN指向列表中的第一个元素(例中的报文对象5),位域LIST.END指向列表中的最后一个元素(例中的报文对象3)。
列表中的元素个数由位域LIST.SIZE给出(SIZE = 列表中的元素数-1,因此例子中元素数为3,SIZE = 2)。
位LIST.EMPTY指示该列表是否为空(因为列表2不为空,所以例中EMPTY = 0)每个报文对象n有一个指针MOCTRn.PNEXT,用来指向列表中的下一个报文对象,同时还有一个指针MOCTRn.PPREV,用来指向列表中的前一个报文对象。
第一个报文对象的PPREV指向其本身,因为第一个报文对象之前没有报文对象(例中的报文对象5为第一个报文对象,由PPREV = 5表示)。
最后一个报文对象的PNEXT也指向其本身,因为最后一个报文对象之后没有报文对象(例中报文对象3为列表的最后一个报文对象,由PNEXT = 3 表示)位域MOCTRn.LIST指示报文对象当前所属的列表编号,例中的报文对象都分配给了列表2。
因此,所有的分配给列表2的报文对象的LIST位域都设置为LIST = 2。
MultiCAN的组成CAN节点分析特性分析模式:对CAN 通信进行监控,而不影响CAN 总线逻辑状态。
置位NCRx.CALM,选择CAN分析模式。
在CAN 分析模式下,CAN 节点的发送引脚永久保持为隐性电平。
CAN 节点可以接收帧(数据,远程,和错误帧),但是不允许发送。
接收到的数据/远程帧不会被应答(也就是说,应答时隙为隐性)但是只要其它任何一个节点应答了该帧,该帧将被接收和保存在匹配报文对象中。
分析模式提供完整的报文对象功能,但是将不执行发送请求。
在分析模式下,节点只接受数据,不发送数据。
在不影响总线使用的情况下,监控CAN总线的逻辑状态,分析在CAN总线上数据的传输。
也同样用于数据的传输记录保存。
MultiCAN的组成CAN的回环模式CAN的回环模式可以使用户无需访问外部CAN 总线就可以进行MultiCAN 模块的在系统测试和CAN 驱动软件的开发。
置位NPCRx.LBM来选择回环模式。
所有处于回环模式的CAN 节点可以用内部总线进行通信,而不影响其它不处于回环模式的CAN 节点的正常工作。
位时序分析每个CAN节点都通过CAN帧计数器分析模式执行详细的位时序分析。
帧计数器的位时序分析功能用于CAN波特率自动检测和CAN网络的时序分析。
通过设置NFCRx.CFMOD= 10B,选择位时序分析功能位时序分析不影响CAN节点的操作。
位时序的测量结果被写入到位域NFCRx.CFC。
在位时序分析模式下,每当位域NFCRx.CFC被更新,位NFCRx.CFCOV都被置位,用来指示CFC 更新事件。