凸轮轮基本尺寸的设计
- 格式:doc
- 大小:288.50 KB
- 文档页数:7
第四节 凸轮机构基本尺寸设计无论是作图法还是解析法,在设计凸轮廓线前,除了需要根据工作要求选定从动件的运动规律外,还需要确定凸轮机构的一些基本参数,如基圆半径b r 、偏距e 、滚子半径r r 等。
一般来讲,这些参数的选择除了应保证从动件能够准确地实现预期的运动规律外,还应当使机构具有良好的受力状况和紧凑的结构。
本节讨论凸轮机构基本尺寸设计的原则和方法。
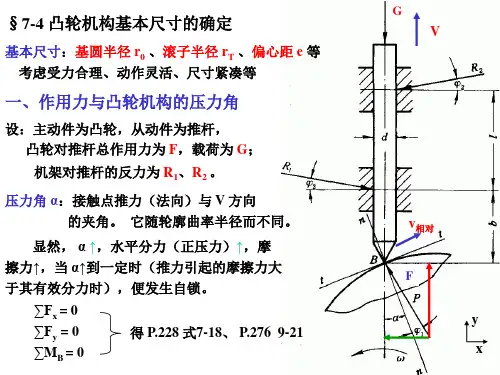
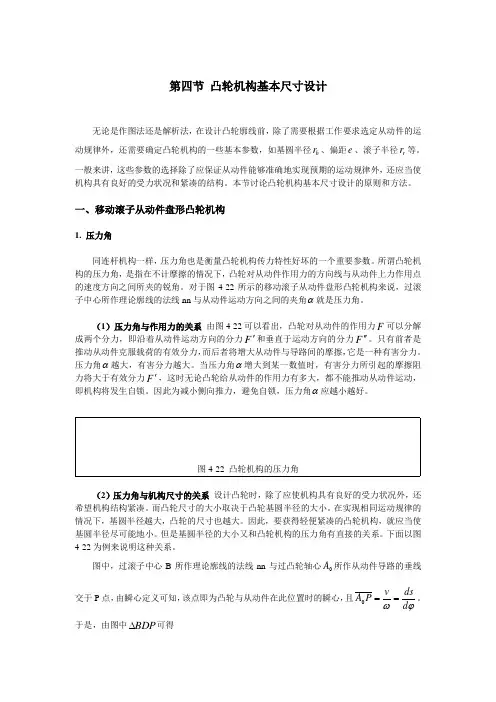
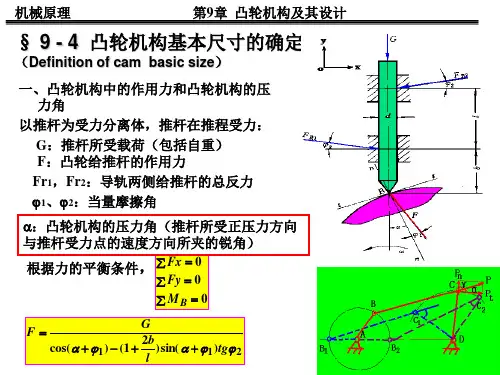
一、移动滚子从动件盘形凸轮机构1. 压力角同连杆机构一样,压力角也是衡量凸轮机构传力特性好坏的一个重要参数。
所谓凸轮机构的压力角,是指在不计摩擦的情况下,凸轮对从动件作用力的方向线与从动件上力作用点的速度方向之间所夹的锐角。
对于图4-22所示的移动滚子从动件盘形凸轮机构来说,过滚子中心所作理论廓线的法线nn 与从动件运动方向之间的夹角α就是压力角。
(1)压力角与作用力的关系 由图4-22可以看出,凸轮对从动件的作用力F 可以分解成两个分力,即沿着从动件运动方向的分力F '和垂直于运动方向的分力F ''。
只有前者是推动从动件克服载荷的有效分力,而后者将增大从动件与导路间的摩擦,它是一种有害分力。
压力角α越大,有害分力越大。
当压力角α增大到某一数值时,有害分力所引起的摩擦阻力将大于有效分力F ',这时无论凸轮给从动件的作用力有多大,都不能推动从动件运动,即机构将发生自锁。
因此为减小侧向推力,避免自锁,压力角α应越小越好。
图4-22 凸轮机构的压力角(2)压力角与机构尺寸的关系 设计凸轮时,除了应使机构具有良好的受力状况外,还希望机构结构紧凑。
而凸轮尺寸的大小取决于凸轮基圆半径的大小。
在实现相同运动规律的情况下,基圆半径越大,凸轮的尺寸也越大。
因此,要获得轻便紧凑的凸轮机构,就应当使基圆半径尽可能地小。
但是基圆半径的大小又和凸轮机构的压力角有直接的关系。
下面以图4-22为例来说明这种关系。
图中,过滚子中心B 所作理论廓线的法线nn 与过凸轮轴心0A 所作从动件导路的垂线交于P 点,由瞬心定义可知,该点即为凸轮与从动件在此位置时的瞬心,且ϕωd ds v P A ==0。
第四节 凸轮机构基本尺寸的设计在设计凸轮的轮廓曲线时,不仅要保证从动件能够按给定要求实现预期的运动规律,还应该保证凸轮机构具有合理的结构尺寸和良好的运动、力学性能。
对于基圆半径、偏距和滚子半径等基本尺寸,在进行凸轮轮廓曲线的设计之前都是事先给定的。
如果这些基本参数选择不当,就会存在凸轮机构的结构是否合理、运动是否失真以及受力状况是否良好等问题。
因此,本节主要讨论有关凸轮机构基本尺寸的设计问题,为正确、合理选择这些基本参数提供一定的理论依据。
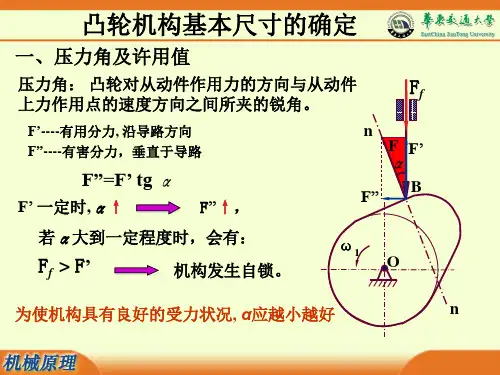
一、凸轮机构的压力角凸轮机构的压力角是指不计摩擦时,凸轮与从动件在某瞬时接触点处的公法线方向与从动件运动方向之间所夹的锐角,常用α表示。
压力角是衡量凸轮机构受力情况好坏的一个重要参数,是凸轮机构设计的重要依据。
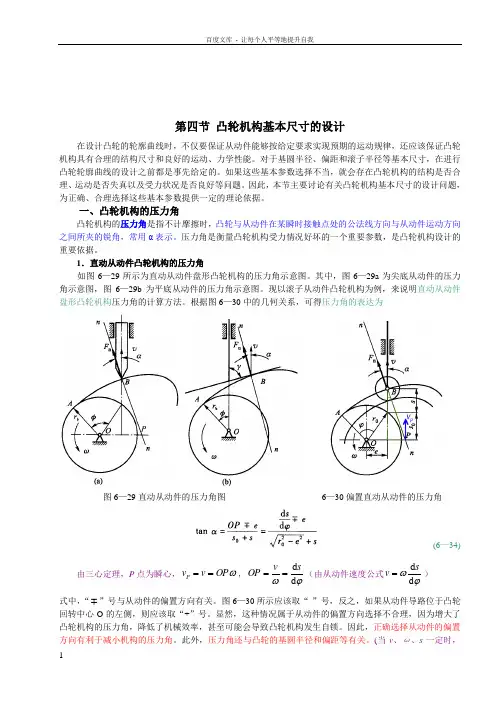
1.直动从动件凸轮机构的压力角如图6—29所示为直动从动件盘形凸轮机构的压力角示意图。
其中,图6—29a 为尖底从动件的压力角示意图,图6—29b 为平底从动件的压力角示意图。
现以滚子从动件凸轮机构为例,来说明直动从动件盘形凸轮机构压力角的计算方法。
根据图6—30中的几何关系,可得压力角的表达为图6—29直动从动件的压力角图 6—30偏置直动从动件的压力角(6—34)由三心定理,P 点为瞬心,ωOP v v P ==,ϕωd d s vOP ==(由从动件速度公式ϕωd d s v =) 式中,“ ”号与从动件的偏置方向有关。
图6—30所示应该取“-”号,反之,如果从动件导路位于凸轮回转中心O 的左侧,则应该取“+”号。
显然,这种情况属于从动件的偏置方向选择不合理,因为增大了凸轮机构的压力角,降低了机械效率,甚至可能会导致凸轮机构发生自锁。
因此,正确选择从动件的偏置方向有利于减小机构的压力角。
此外,压力角还与凸轮的基圆半径和偏距等有关。
(当v 、ω、s 一定时,若凸轮基圆半径增大,则压力角α将减小,但机构尺寸随之增大;若凸轮基圆半径减小,压力角α将增大,机构的受力情况变差。
机械原理20_凸轮轮廓设计凸轮基本尺寸的确定凸轮是机械中常用的传动元件,广泛应用于各种工业设备和机械装置中。
凸轮的设计需要确定凸轮轮廓和基本尺寸。
本文将介绍凸轮轮廓设计和凸轮基本尺寸的确定方法。
凸轮轮廓设计是指确定凸轮的外形形状。
凸轮的轮廓形状决定了它的运动轨迹,因此在设计凸轮轮廓时需要考虑以下几个因素:1.运动要求:根据凸轮所要驱动的运动机构的要求,确定凸轮的轮廓形状。
例如,如果凸轮需要驱动一个摆动臂做往复运动,那么凸轮的形状应该是一个椭圆或近似椭圆的轮廓。
2.动力学要求:根据凸轮轮廓和运动机构的特点,考虑凸轮的加速度、凸轮轮廓的曲率、运动速度的变化等因素,以满足设计要求。
一般情况下,凸轮轮廓的曲率应该尽可能平滑,避免出现尖锐的拐角和突变。
3.制造工艺要求:考虑凸轮的制造工艺,选择合适的加工方法和工艺参数。
凸轮的轮廓形状应该尽量简单,避免过于复杂的几何形状,以降低制造成本和加工难度。
确定凸轮基本尺寸是指确定凸轮的大小和形状。
凸轮的基本尺寸包括凸轮的直径、高度、凸轮轴的位置等。
1.直径:凸轮的直径是指凸轮的外径,一般由运动机构的安装空间和工作要求来确定。
直径越大,凸轮的刚性越高,但制造成本也会增加。
2.高度:凸轮的高度是指凸轮的轮廓跟凸轮轴之间的距离。
高度的选择应考虑运动机构的工作要求、凸轮的强度和刚度要求等因素。
3.凸轮轴的位置:凸轮轴的位置决定了凸轮的相对位置和工作空间。
凸轮轴的位置应根据运动机构的要求和布置来确定。
确定凸轮的基本尺寸需要进行综合考虑运动要求、动力学要求、制造工艺要求等因素。
可以通过计算和仿真分析,也可以根据经验进行初步估算,然后根据实际情况进行调整和优化。
总之,凸轮轮廓设计和凸轮基本尺寸的确定是机械原理中重要的一部分。
准确的凸轮轮廓设计和合理的凸轮基本尺寸可以保证机械系统的正常运转和性能要求的满足。
凸轮设计标准导言凸轮是机械传动系统中常见的元件,其设计的合理性直接关系到机械系统的性能和使用寿命。
为了确保凸轮的设计能够满足使用要求,需要遵循一系列的凸轮设计标准。
本文将从凸轮的基本原理、设计要求、制造工艺等方面入手,对凸轮设计标准进行详细的分析和总结。
一、凸轮的基本原理凸轮是一种具有不规则外形的旋转零件,常用于传动机构中。
通过凸轮与相应的摩擦副作用,可实现连续往复运动或作往复运动。
在凸轮的设计中,需要考虑的主要因素包括凸轮外形的曲线形状、凸轮与运动副之间的运动关系、以及凸轮的材料和制造工艺等。
二、凸轮设计要求1.凸轮的运动规律要求要求:(1)顺从机构要求的往复或连续运动规律;(2)与实际工作过程中的负载、惯量、速度和加速度等参数相匹配;(3)保证与摩擦副之间的相对运动规律。
2.凸轮轮廓的设计:(1)凸轮运动规律的分析为轮廓线的基础;(2)保证摩擦副的工作可靠性和寿命;(3)减小凸轮与摩擦副的相对运动磨损。
3.凸轮的制造要求:(1)凸轮的材料要求;(2)凸轮的表面质量要求;(3)凸轮的装配和调试要求。
三、凸轮设计标准1.国际标准:(1)ISO 9075:1991机器构图中的一般凸轮和滑块图样的表示(2)ISO 8321:1986机器构图中的一般凸轮图型的表示-基本凸轮和增加凸轮2.国家标准:(1)GB/T 28790-2012凸轮轴技术条件(2)GB/T 4717-2005机械构图凸轴基本尺寸十(3)GB/T 6862-2013 凸轮滚轴型凸轮位总体技术条件四、凸轮的制造工艺凸轮的制造工艺涉及到材料选择、加工工艺和表面处理三个方面。
1.材料的选择:通常情况下,凸轮的制造常采用优质合金钢或高速钢,以保证其强度、硬度和耐磨性。
2.加工工艺:凸轮的加工工艺包括车削、铣削、磨削等多种工艺,以保证凸轮的准确性和表面质量。
3.表面处理:凸轮表面的热处理、表面喷涂等工艺,将影响凸轮的耐磨性、耐腐蚀性和表面硬度。
第四节 凸轮机构基本尺寸的设计在设计凸轮的轮廓曲线时,不仅要保证从动件能够按给定要求实现预期的运动规律,还应该保证凸轮机构具有合理的结构尺寸和良好的运动、力学性能。
对于基圆半径、偏距和滚子半径等基本尺寸,在进行凸轮轮廓曲线的设计之前都是事先给定的。
如果这些基本参数选择不当,就会存在凸轮机构的结构是否合理、运动是否失真以及受力状况是否良好等问题。
因此,本节主要讨论有关凸轮机构基本尺寸的设计问题,为正确、合理选择这些基本参数提供一定的理论依据。
一、凸轮机构的压力角凸轮机构的压力角是指不计摩擦时,凸轮与从动件在某瞬时接触点处的公法线方向与从动件运动方向之间所夹的锐角,常用α表示。
压力角是衡量凸轮机构受力情况好坏的一个重要参数,是凸轮机构设计的重要依据。
1.直动从动件凸轮机构的压力角如图6—29所示为直动从动件盘形凸轮机构的压力角示意图。
其中,图6—29a 为尖底从动件的压力角示意图,图6—29b 为平底从动件的压力角示意图。
现以滚子从动件凸轮机构为例,来说明直动从动件盘形凸轮机构压力角的计算方法。
根据图6—30中的几何关系,可得压力角的表达为图6—29直动从动件的压力角图 6—30偏置直动从动件的压力角(6—34)由三心定理,P 点为瞬心,ωOP v v P ==,ϕωd d s vOP ==(由从动件速度公式ϕωd d s v =) 式中,“ ”号与从动件的偏置方向有关。
图6—30所示应该取“-”号,反之,如果从动件导路位于凸轮回转中心O 的左侧,则应该取“+”号。
显然,这种情况属于从动件的偏置方向选择不合理,因为增大了凸轮机构的压力角,降低了机械效率,甚至可能会导致凸轮机构发生自锁。
因此,正确选择从动件的偏置方向有利于减小机构的压力角。
此外,压力角还与凸轮的基圆半径和偏距等有关。
(当v 、ω、s 一定时,若凸轮基圆半径增大,则压力角α将减小,但机构尺寸随之增大;若凸轮基圆半径减小,压力角α将增大,机构的受力情况变差。
)当偏距e =0时,代入式(6—34),即可得到对心直动从动件盘形凸轮机构的压力角计算公式:)(d d d d tan 00220s r v s r ss e r s +=+=+-=ωϕϕα (6—35) 对于直动平底从动件盘形凸轮机构(图6—29所示),根据图中的几何关系,其压力角为α=90°-γ式中,γ为从动件的平底与导路中心线的夹角,其值为一常数。
显然,平底直动从动件凸轮机构的压力角为常数,机构的受力方向不变,运转平稳性好。
如果从动件的平底与导路中心轴线之间的夹角γ=90°,则压力角α=0°。
2.摆动从动件凸轮机构的压力角图6—31所示为摆动从动件盘形凸轮机构的压力角示意图。
其中,图6—31a 为滚子从动件的压力角示意图,图6—31b 为平底从动件的压力角示意图。
(a ) (b ) 图6—31 摆动从动件盘形凸轮机构的压力角对于摆动滚子从动件凸轮机构(图6—31a),设摆杆的长度AB =l ,机架的长度OA =a 。
过瞬心P (三心定理)作摆杆AB 的垂线,交AB 的延长线于D 点,则根据图中的几何关系,有(6-36)(BD =AD -AB =AD -l )(ω1d t =d ψ,ω2d t =d φ)根据瞬心的性质可得,所以,将上式代入式(6-36)并整理,即可得到摆动滚子从动件凸轮机构压力角的计算公式:(6—37)对于摆动平底从动件盘形凸轮机构,如图6—31b 所示,凸轮与从动件的接触点B 的速度方向垂直于AB ,而B 点的受力方向垂直于平底。
因此,其压力角计算公式为ABe=αsin (6—38) 式中,长度AB 按照式(6—28)的方法计算。
显然,如果e=0,则其压力角也为零。
由式(6—37)、式(6—38)可知,对于摆动从动件盘形凸轮机构,其压力角受从动件的运动规律、摆杆长度、机架长度等因素的影响,在设计时要加以注意。
3.凸轮机构的许用压力角凸轮机构的压力角与基圆半径、偏距和滚子半径等基本尺寸有直接的关系,而且这些参数之间往往是互相制约的。
以直动滚子从动件凸轮机构为例,在其他参数不变的情况下,增大凸轮的基圆半径可以获得较小的压力角,从而可以改善机构的受力状况,但缺点是凸轮尺寸增大。
反之,减小凸轮的基圆半径虽然可以获得较为紧凑的结构,但同时又使凸轮机构的压力角增大。
压力角过大会导致凸轮机构发生自锁而无法运转,而且当压力角增大到接近某一极限值时,即使机构尚未发生自锁,也会导致驱动力急剧增大,发生轮廓严重磨损和效率迅速降低的情况。
因此为了使凸轮机构能够正常工作并具有较高的传动效率,设计时必须对凸轮机构的最大压力角加以限制,使其小于许用压力角,即αmax <[α]。
凸轮机构的许用压力角如表6—2所示。
二、凸轮机构基本尺寸的设计1.基圆半径的设计对于直动滚子从动件盘形凸轮,可根据式(6—34)求解出凸轮的基圆半径:(6—39)显然,压力角α越大,基圆半径越小,机构就越容易获得紧凑的尺寸。
在其他参数不变的情况下,当α=[α],并且选择正确的从动件偏置方向后,可以得到最小的基圆半径r 0min ,从而可以使设计出的凸轮机构在满足压力角条件的同时,获得紧凑的结构尺寸。
此时,最小基圆半径为(6—40)(对心尖顶推杆盘形凸轮机构 s v r b -=αωtan 12)(e =0)对于直动平底从动件盘形凸轮,可按照“凸轮廓线全部外凸”的条件来设计凸轮的基圆半径。
也就是说,凸轮廓线上各点的曲率半径ρ>0。
由高等数学的知识可知,曲率半径的计算公式为")'1(2/32y y +=ρ (6-41)式中,ϕϕd dx d dy dxdy y ==',代人式(6—41)并整理得 (6-42)选择所允许的最小曲率半径ρmin ,与平底从动件盘形凸轮的廓线方程联立求解,可得22min b ϕρd sd s r --> (6—43)经验公式r b ≈2r H (r H 为凸轮轴孔的半径)s =9.4α=25°33'46"s =9.446°28'1"2.滚子半径的设计在滚子从动件盘形凸轮机构中,凸轮的实际廓线是其理论廓线上滚子圆族的包络线,因此其形状必然与滚子的半径大小有关。
在设计滚子尺寸时,必须保证滚子同时满足运动特性要求和强度要求。
从运动特性要求考虑,凸轮机构不能发生运动的失真现象。
图6—32所示为凸轮的外凸廓线中的滚子圆族的包络情况。
设理论廓线上某点的曲率半径为ρ,实际廓线在对应点的曲率半径为ρa ,滚子半径为r r ,根据图中的几何关系有ρa =ρ—r r 。
图6—32外凸廓线的包络线如果r r ≥ρmin ,则该点处将发生实际廓线的曲率半径为零或负值的情况。
实际廓线曲率半径为零,表明在该位置出现尖点,运动过程中容易磨损;而实际廓线曲率半径为负值,说明在包络加工过程中,图中交叉的阴影部分将被切掉,从而导致机构的运动发生失真。
因此,为了避免发生这种现象,要对滚子的半径加以限制。
ρ实际廓线正常尖顶失真理论廓线r r>ρTr r =ρTρTρ实际廓线理论廓线r rρTr r <ρT通常情况下,应保证r r ≤0.8ρmin对于内凹凸轮廓线中滚子圆族的包络情况,同样可按照上述方法进行分析,这里不再详述。
从强度要求考虑,滚子半径应满足以下条件:r r≥(0.1~0.5)r0(基圆半径)3.平底长度的设计如图6—33所示,在平底从动件盘形凸轮机构运动过程中,应能保证从动件的平底在任意时刻均与凸轮接触,因此平底的长度l应满足以下条件:式中,△l为附加长度,由具体的结构而定,一般取△l=5~7 mm。
4.偏距的设计从动件的偏置方向可直接影响凸轮机构压力角的大小,因此在选择从动件的偏置方向时需要遵循的原则是:尽可能域小凸轮机构在推程阶段的压力角,其偏置的距离(即偏距e)可按下式计算:图6—33平底从动件的长度(6-4)一般情况下,从动件运动速度的最大值发生在凸轮机构压力角最大的位置,则式(6—44)可改写为(6-45) 由于压力角为锐角,故有v max-eω≥0。
由式(6—45)可知,增大偏距,有利于减小凸轮机构的压力角,但偏距的增加也有限度,其最大值应满足以下条件:设计偏置式凸轮机构时,其从动件偏置方向的确定原则是:从动件应置于使该凸轮机构的压力角减小的位置。
综上所述,在进行凸轮机构基本尺寸的设计时,由于各参数之间是互相制约的,设计时应该综合考虑各种因素,使其综合性能指标满足设计要求。
补例1一对心尖底推杆盘形凸轮机构,凸轮为一偏心圆盘。
已知圆盘半径为r,偏心距O1O等于e。
试确定该凸轮机构的基本参数和压力角最大值。
解由图可见,当凸轮顺时针转动,凸轮上的A、B两点与推杆接触时,推杆位于推程的起点和终点,故行程h=(r+e)-(r-e)=2e推程运动角与回程运动角相等,φ=φ’=180°,故无休止阶段,φs=φs’=0。
基圆半径r b=r-eOK与导路的夹角为压力角α。
当O1O垂直于导路时,ON=e,压力角为最大值αmax。
补例2 求图示凸轮机构的推程H、推程角φ、远休止角φs、基圆半径r b和最大压力角αmax。
图中尺寸单位为mm。
解行程h=12×2/sin60°=27.7mm推程运动角φ= 180°;远休止角φs=近休止角φ’s=0基圆半径r b=20-12=8mm;压力角α恒等于30°。