自动控制理论(邹伯敏)第四章答案
- 格式:docx
- 大小:121.07 KB
- 文档页数:8
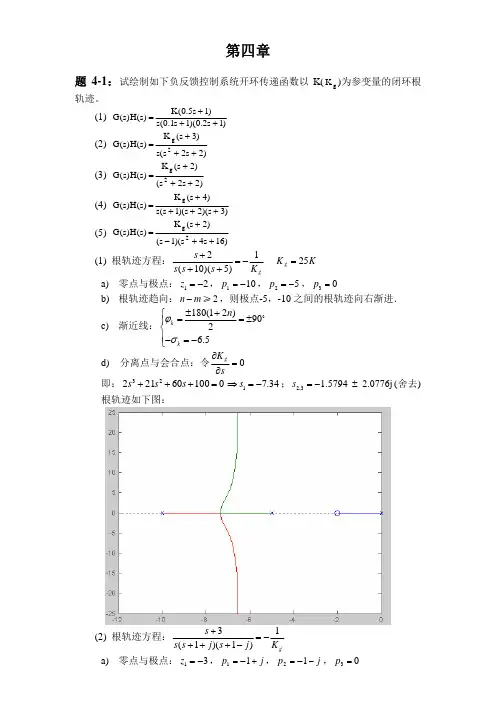
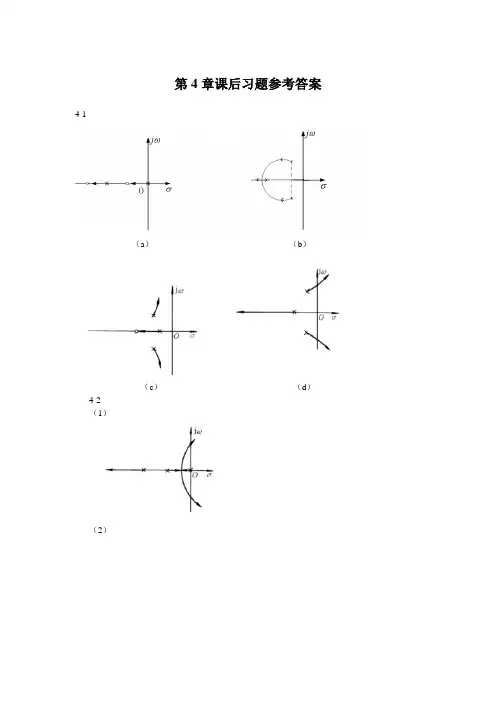
第4章课后习题参考答案4-1(a)(b)(c)(d)4-2(1)(2)4-3(1)(2)(j 24.20 ),K=10.14 4-4 (1)(2)(3)4-5(1)0>K (2)2>K 4-6(1)(2) 闭环极点(j 7.597.0±-),K=34.77 4-7 (1)110222-=+++s s s a(2)130202-=+ss a4-8正反馈 负反馈表明K>0对于正反馈系统不稳定,负反馈系统稳定。
4-90.707ξ=,系统开环传递函数为)4(8)(+=s s s G ,系统的单位阶跃响应为)(t h =)452sin(5.012 +--t e t4-10σωj 007.17-93.2-5-10-(1) K=5;(2)不含有衰减振荡分量的K 值范围为86.00<<K 或29>K 。
4-11 系统的开环极点为0和-p ,开环零点为-z 。
由根轨迹的幅角条件, 得π)12()()(+=+∠-∠-+∠q p s s z s 。
将ωσj s +=代入,整理有pz++︒=-+---σωσωσω111tan 180tan tan取上述方程两端的正切,并利用下列关系yx yx y x tan tan 1tan tan )tan( ±=±有p z z +=++-σωωσσω2)(,则zp z z -=++222)(ωσ,这是一个圆的方程,圆心位于(-z ,j 0)处,而半径等于zp z -2(注意,圆心位于开环传递函数的零点上)。
证毕。
4-12(1)分离点-0.465,对应K=0.88;虚轴的交点j 2± (2)88.00<<K ,阶跃响应不出现超调。
4-13(1)(2)70MAX K =4-14负反馈稳定K 值范围为0<K<73.8,正反馈稳定K 值范围为0<K<35,所以确定根轨迹增益K 的范围为0<K<35。
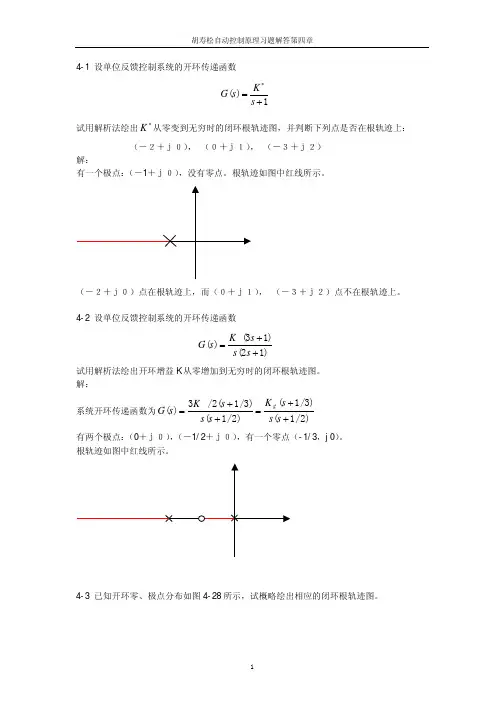
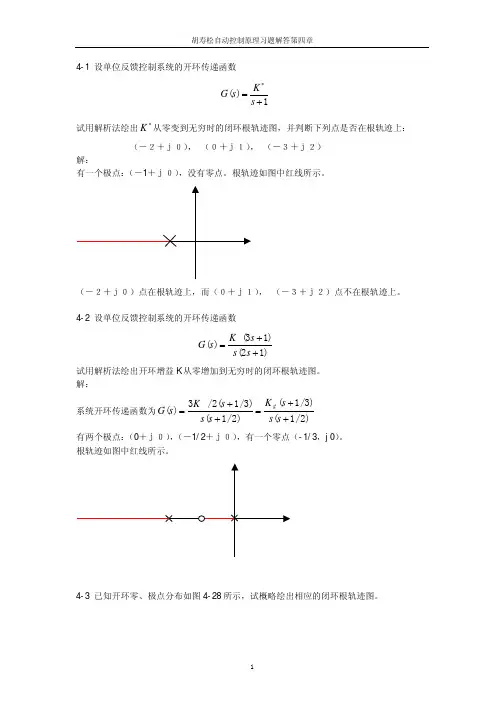
4-1 设单位反馈控制系统的开环传递函数 1)(+=∗s K s G试用解析法绘出∗K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2+j0), (0+j1), (-3+j2) 解:有一个极点:(-1+j0),没有零点。
根轨迹如图中红线所示。
(-2+j0)点在根轨迹上,而(0+j1), (-3+j2)点不在根轨迹上。
4-2 设单位反馈控制系统的开环传递函数 )12()13()(++=s s s K s G 试用解析法绘出开环增益K 从零增加到无穷时的闭环根轨迹图。
解:系统开环传递函数为)2/1()3/1()2/1()3/1(2/3)(++=++=s s s K s s s K s g G 有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。
根轨迹如图中红线所示。
4-3 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
图4-28 开环零、极点分布图4-4 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d): (1) )15.0)(12.0()(++=s s s Ks G解:系统开环传递函数为)2)(5()2)(5(10)(++=++=s s s K s s s Ks g G 有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。
分离点坐标计算如下:051211=++++d d d 3解方程的010142=++d d 7863.31−=d ,d 88.02−=取分离点为88.0−=d根轨迹如图中红线所示。
(2) )12()1()(++=s s s K s G解:系统开环传递函数为)5.0()1()5.0()1(2/)(++=++=s s s K s s s K s g G有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:115.011+=++d d d 解方程的05.022=++d d 7.11−=d ,d 29.02−=取分离点为7.11−=d ,29.02−=d 根轨迹如图中红线所示。

自动控制理论(哈尔滨工程大学)智慧树知到课后章节答案2023年下哈尔滨工程大学哈尔滨工程大学第一章测试1.对自动控制系统的基本要求是()、快速性、准确性。
()是保证控制系统正常工作的先决条件。
A:稳态性能;稳定性B:稳定性;准确性C:稳定性;稳定性D:稳态误差;快速性答案:稳定性;稳定性2.传递函数只适用于单输入单输出()系统。
A:非线性定常;B:非线性时变。
C:线性时变;D:线性定常;答案:线性定常;3.从元器件职能看热水器水温控制系统,蒸汽阀门是()元件,温度传感器是()元件。
A:放大,测量;B:执行,比较。
C:执行,测量;D:比较,给定;答案:执行,测量;4.扰动控制技术只适用于()的场合。
A:扰动未知B:扰动可以测量C:系统参数已知的D:扰动可知的答案:扰动可以测量5.闭环控制又称为()。
A:补偿控制B:反馈控制C:黑箱控制D:前馈控制答案:反馈控制6.下列不属于自动控制系统基本控制方式的是()。
A:开环控制B:程序控制C:闭环控制D:复合控制答案:程序控制7.同一物理系统,当输入输出变量不同时,描述系统传递函数的分母可能不同。
A:对 B:错答案:错8.复合控制有两种基本形式,按输入补偿的复合控制和按扰动补偿的复合控制。
A:对 B:错答案:对9.相比开环直流电动机转速系统,闭环直流电动机转速系统成本高、结构复杂,但抗干扰能力强。
A:错 B:对答案:对10.一个好的控制系统对模型的参数变化敏感。
A:错 B:对答案:错第二章测试1.已知系统的微分方程为,则系统的传递函数是()A:C:D:答案:2.传递函数的表达形式有有理分式形式、零极点形式和()。
A:首1形式B:时间常数形式C:参数形式D:分数形式答案:时间常数形式3.关于传递函数,以下()的说法是不正确的。
A:只与系统自身的结构参数有关,与系统输入、输出的形式无关;B:适用于线性定常的单输入、单输出系统;C:是系统输出的拉氏变换与输入的拉氏变换之比;D:是复变量s的有理分式函数;答案:是系统输出的拉氏变换与输入的拉氏变换之比;4.如图所示反馈控制系统的典型结构图,A:B:C:D:答案:5.如图的系统信号流图中有()个单独闭合回路。
最新资料推荐自动控制理论第三章作业答案题 3-4解: 系统的闭环传递函数为由二阶系统的标准形式可以得到n 1,3.6276 sa 0.5589因此,上升时间 t r arctan 12.418s5% t s调整时间: 36s n2% 48s p e t s 100% 16.3% 超调量: 题 3-5闭环传递函数 C(s) R(s) n 2 10 2 n 5a 1 10 2 s 2 (5a 1)s 10 n 10 5a 1 2 100.6 C(s) R(s) G(s)1 G(s)1 s2 s 1峰值时间 t p5%3 t s 1.581s n 2% 4t s 2.108s题 3-7 解:=0.3579 n 33.64题 3-8C(s) 100R(s) s(s 2 8s 24) 100 特征方程为 s 3 8s 224s 100 0 列出劳斯表: 3s 3 1 24 0s 2 8 100 0 s 11.5 0s 0 100第一列都是正数,所以系统稳定最新资料推荐 t pdn 1.242s e 1 100%9.45% 2) G(s) 10(s 1)s(s 1)(s 5)上升时间 t p 0.1 d n 超调量 M p e 1 100%1.3 1 30% 1开环传递函数 G(s) 2n 2 s(s 2 n ) 1131.9 2s 2 24.08s1) G(s)100 s(s 2 8s 24)解:闭环传递函数为最新资料推荐解:闭环传递函数 C(s) 10(s 1)R(s) s(s 1)(s 5) 10(s 1)32特征方程为 s 3 5s 2 5s 10 0列出劳斯表:s 3 1 5 0s 2 4 10 0s 2.5 0s 0 10第一列都是正数,所以系统稳定(3) G(s) 10s(s 1)(2s 3)C(s) 10R(s) s(s 1)(2s 3) 10特征方程为 2s 3 s 2 3s 10 0列出劳斯表: 3 s 2 3 02 s 1 10 01 s 23 00 s 10劳斯表第一列的数符号变了 2 次,因此在 s 平面的右半部分有两个特征根,系统不稳定。
S ]
2, s
2
4 2j ,因此,有 3条根轨迹趋于无穷远,其渐近线倾角为
F 面确定根轨迹的分离点和汇合点
D(s) s(0.05s 2 0.4s 1) K 0
10 3
题 4-1
j A
(b) (c)
题4-2 解: 由开环传
递函数容易得到
3,m 0
个极点分别为
(2k 1) 3
5 3
,渐近线与实轴交点为
n
m
(P l )
( Z i )
11
i 1 ________
A
n m
Pl 0, P 2
4 2j, P 3
dK。
0.15s 2 0.8s 1 0
计算根轨迹的出射角与入射角
8 0
$ 2齐2年(舍去)
8 0
$ 2
齐 2年(舍去)
P3 p2
63.4°
确定根轨迹与虚轴的交点
由开环传递函数容易得到
n 3,m 0 ,三个极点分别为 p, 0, P 2 2, P 3 4 ,因
令s j ,特征方程D(s) 0.4 2 K 0 0 0.05 3
0.05 2 0.4j 1) K 。
2.5 8
K o
K。
0或
题4-5 解:
此,有3条根轨迹趋于无穷远, 其渐近线倾角为 (2k 1)
3
3,詈,渐近线与实轴
n m (P l )
交占为 d---------------------- 」 n m (Z i ) 2。
F 面确定根轨迹的分离点和汇合点 D(s) s(s 2)(s 4)
坐
3s 2 12s
ds K 。
0 确定根轨迹与虚轴的交点
p2
( arcta n 63.4°
题4-6
令s j ,特征方程D(s) j (j
2)( j 4) K o
3.1 P ci 要产生阻尼振荡,需要
0且
0。
当s.
2、孑3 2
时,K 0 =3.08,所以,当
3
K o 48时,系统呈阻尼振荡。
当K o
48时,系统产生持续等幅振荡,振荡频率为
2,2
=0.5 arccos 0.5
过 s 平面原点,与实轴负方向夹角为 60作射线,与根轨迹 60°
交占 八、、 即为主导 极点 。
由图知,主 导极点为 0.7 ji.2 。
又 P c2 P c3 P i P 2 P 3 6
P c3 4.6 所以仲% K o
2)*( 7.176
4.6 4) K 0 解:
(1)由开环传递函数容易得到n 3,m 1 ,
三个极点 和一个零点分别为
系统的闭环传递函数
s 3 s 2
2.5s Ts 2 Ts
1 T(s 1) s 2
s
2.5
,等效开环传递函数为
P i 0, P 2 1,P 3 3,^ 2,因此,有 2条根轨迹趋于无穷远,其渐近线倾角为
F 面确定根轨迹的分离点和汇合点
D(s) s(s 1)(s 3) K 0(s 2) 0 (s 1)(s 2)2 1 s 0.55
(2)
=0.5
arCC0S 0.5
过s 平面原点,与实轴负方向夹角为
60°
交点即为主导极点。
由图知,主导极点为 0.7 j1.1。
又Pc1
Pc2
Pc3
P c3
2.6
2.6*( 2.6 1)*( 2.6 3) K 0( 2.6 2)
所以
K 0 2.77
题4-9 解:
(2k 1)
2
3
2 ,_
2
,渐近线与实轴交点为 n
m
(P l )
( Z i )
l 1
i 1
A
n m
60o 作射线,与根轨迹的
口 P 2 P 3
米
-3
(2k 1)
1
F面确定根轨迹的分离点和汇合点
2
D(s) s s 2.5 T(s 1) 0
计算根轨迹的出射角与入射角
解:
由开环传递函数容易得到n 3,m 0 ,三个极点分别为p p2 p32,因此,有3条G(s)
T(s 1)
s2s 2.5
由等效开环传递函数容易得到n 2,m 1 ,两个极点和
P i
1 j3
2
P2
1 j3
1,因此,有1条根轨迹趋于无穷远,
「个零点分别为
其渐近线倾角为
dK o
ds
2
s 2s 1.5 0
s1
4 10
1 V,52
1乎舍去)
P2
arctan3 -
2
2161.6°
161.6°
P3
题4-12
arccos 0.5 过s 平面原点,与实轴负方向夹角为
60o
根轨迹趋于无穷远,其渐近线倾角为 (2k 1)
3
,,5 ,渐近线与实轴交点为 3 3
n (P l ) l 1
A m (z) i 1 n m F 面确定根轨迹的分离点和汇合点 D(s) (s
ds s 1 £ 2)3 K o 0
3(s 2)2
确定根轨迹与虚轴的交点 令s j ,特征方程D(s) 6 2 K 0 8 0
3
12 0 (j
2)3 0
(舍去)
K o
或
K。
23 64
K o
(1)令 s
2 “
3 K o 64
=0.5
60o 作射线,与根轨迹的交
3
n
P c1 P c2 P c3 P 1 P 2 P 3 6
P c3
4
(3)系统的闭环传递函数可以近似为
C(s) 8
8
~2
R(s) (s P ci )(s
P c2)
s 2s 4
0.5
M p e i 100%
16.3%
5% t s
2% t s
K p limG(s)H(s)
3
\7 2
8
s
叫
s
t p -
d
点即为主导极点。
由图知,主导极点为
3s 4s。