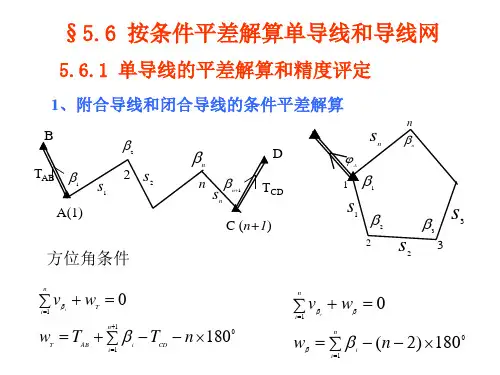
导线网平差
- 格式:doc
- 大小:49.50 KB
- 文档页数:10
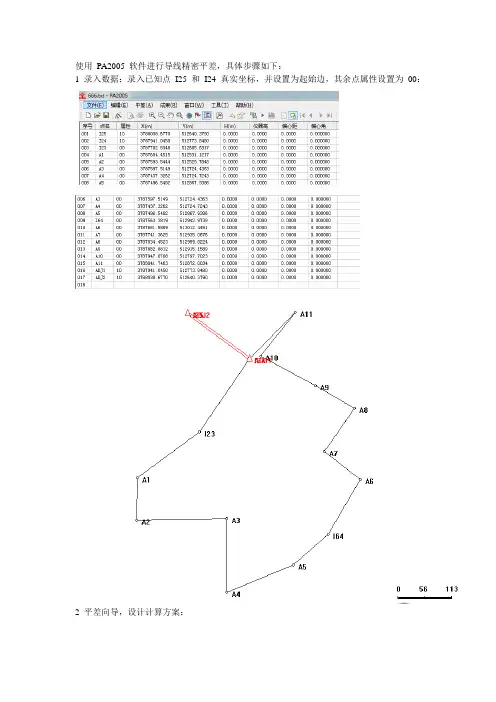
使用PA2005 软件进行导线精密平差,具体步骤如下:1 录入数据:录入已知点I25 和I24 真实坐标,并设置为起始边,其余点属性设置为00:2 平差向导,设计计算方案:3 平差计算:4 闭合差计算:5 控制网平差报告:控制网平差报告计算软件:南方平差易2005网名:计算日期:2015-11-5观测人:王宁宁记录人:王冬计算者:熊猛猛检查者:测量单位:备注:平面控制网等级:城市二级,验前单位权中误差:1.41(s)已知坐标点个数:4未知坐标点个数:13未知边数:14最大点位误差[A5] = 0.0425 (m)最小点位误差[A11] = 0.0206 (m)平均点位误差= 0.0344 (m)最大点间误差= 0.0312(m)最大边长比例误差= 4626平面网验后单位权中误差= 4.21 (s)[边长统计]总边长:1900.251(m),平均边长:135.732(m),最小边长:90.917(m),最大边长:194.692(m)[闭合差统计报告]序号:<1>:附合导线路径:[ADJ2-ADJ1-A11-A10-A9-A8-A7-A6-I64-A5-A4-A3-A2-A1-I23-I24-I25]角度闭合差=-44.00(s),限差=±10.92(s)fx=0.006(m),fy=0.068(m),fd=0.068(m)总边长[s]=1900.251(m),全长相对闭合差k=1/27966,平均边长=135.732(m)[方向观测成果表][平面点位误差表]5.3.7 坐标转换参数计算已知点录入:计算结果:可由DX、DY、R 和DK 值算得四参数为:a=DK*COSR=0.999868617;b=DK*sinR=-0.016392281;c=DX=3788038.6761196m ;d=DY=512640.380192 5588m。
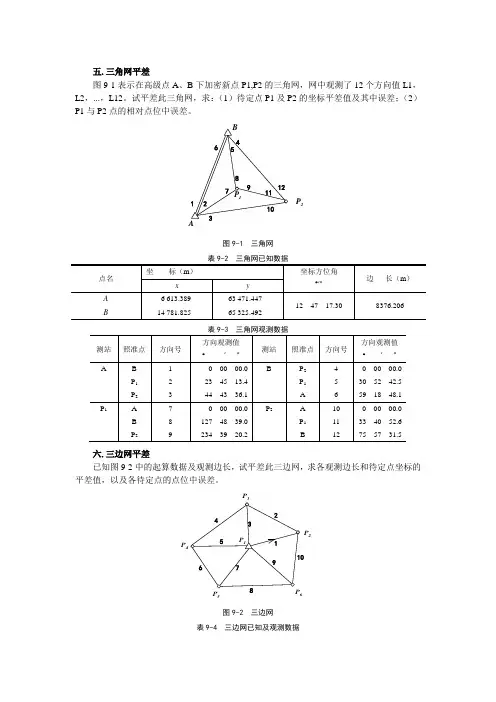
五.三角网平差图9-1表示在高级点A 、B 下加密新点P1,P2的三角网,网中观测了12个方向值L1,L2,...,L12。
试平差此三角网,求:(1)待定点P1及P2的坐标平差值及其中误差;(2)P1与P2点的相对点位中误差。
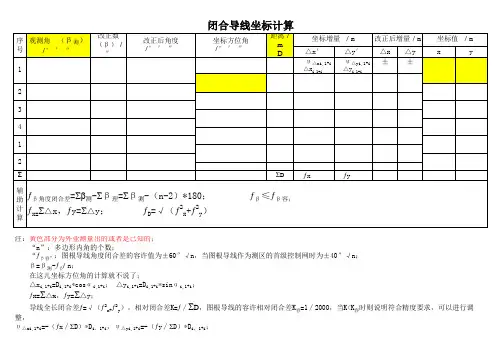
P 2图9-1 三角网表9-3 三角网观测数据六.三边网平差已知图9-2中的起算数据及观测边长,试平差此三边网,求各观测边长和待定点坐标的平差值,以及各待定点的点位中误差。
P 2P P 4P 56图9-2 三边网表9-4 三边网已知及观测数据1 5 760.706 4 7 838.880 7 5 438.382 2 7 804.566 5 5 483.158 8 7 493.323 3 5 187.3426 5 731.7889 8 884.587107 228.367七.导线网平差图9-3为敷设在已知点A 、B 、C 间的单结点导线网,网中观测了12个角度,丈量了9个导线边。
起算数据和观测结果见表9-5。
已知测角中误差14m β''=±,边长丈量中误差i s m =±。
求各导线点的坐标的平差值;观测值的中误差,9号点及结点G 的点位中误差。
AαB图9-3 导线网表9-5 导线网已知及观测数据 A 11678.714 8419.242 A274 23 34 B 10878.302 8415.114 B α 8 10 27 C 11131.959 7722.199α194 20 121221.6504189.7817148.3372 195.843 5 98.163 8 151.4803 229.356 6 154.773 9 187.751。
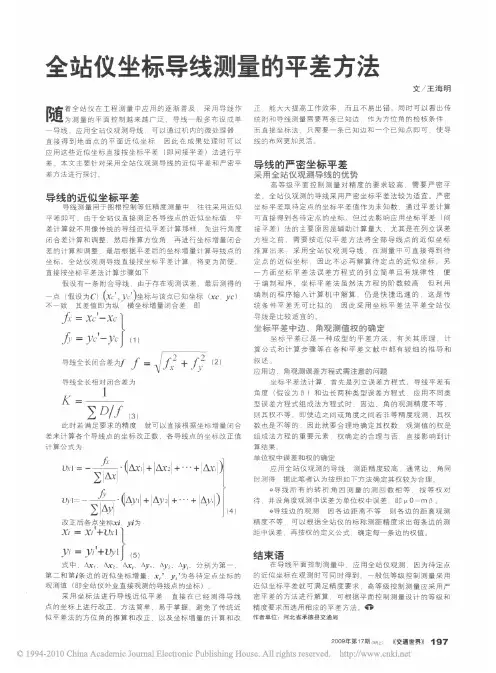
闭合导线坐标计算
注:黄色部分为外业测量出的或者是已知的;
“n”:多边形内角的个数;
“ƒβ容”:图根导线角度闭合差的容许值为±60″√n,当图根导线作为测区的首级控制网时为±40″√n;
β=β测-ƒβ n;
在这儿坐标方位角的计算就不说了;
△x i,1+i=D i,1+i*cosαi,1+i; △y i,1+i=D i,1+i*sinαi,1+i;
ƒx=Ʃ△x,ƒy=Ʃ△y;
导线全长闭合差ƒ=√(ƒ2x+ƒ2y),相对闭合差K=ƒ∕ƩD,图根导线的容许相对闭合差K容=1∕2000,当K<K容时则说明符合精度要求,可以进行调整,
υ△xi,1+i=-(ƒx∕ƩD)*D i,1+i,υ△yi,1+i=-(ƒy∕ƩD)*D i,1+i;
△x △y x y
υ△xi,1+i υ△yi,1+i ±±
△x i,1+i
△y i,1+i
Ʃ
ƩD ƒx ƒy
辅助计算
观测角 (β测) ′ ″改正数
(β) 改正后角度 ′ ″
坐标方位角 ′ ″
56序号1234△x′△y′ƒβ角度闭合差=Ʃβ测-Ʃβ
理=Ʃβ测-(n-2)*180; ƒβ
≤ƒβ容;
ƒx=Ʃ△x,ƒy=Ʃ△y; ƒD =√(ƒ2x +ƒ2y )
注:1、附合导线和闭合导线的差别在于两个方面:①角度闭合差的计算和调整,②坐标增量闭合差的计算;(怎么计算就不一一说了,见谅!)
坐标增量 m 改正后增量 m
坐标值 m 距离 m。
随着全站仪在工程测量中应用的逐渐普及,采用导线作为测量的平面控制越来越广泛,导线一般多布设成单一导线。
应用全站仪观测导线,可以通过机内的微处理器,直接得到地面点的平面近似坐标,因此在成果处理时可以应用这些近似坐标直接按坐标平差(即间接平差)法进行平差。
本文主要针对采用全站仪观测导线的近似平差和严密平差方法进行探讨。
导线的近似坐标平差导线测量用于图根控制等低精度测量中,往往采用近似平差即可。
由于全站仪直接测定各导线点的近似坐标值,平差计算就不用像传统的导线近似平差计算那样,先进行角度闭合差计算和调整,然后推算方位角,再进行坐标增量闭合差的计算和调整,最后根据平差后的坐标增量计算导线点的坐标。
全站仪观测导线直接按坐标平差计算,将更为简便。
直接按坐标平差法计算步骤如下:假设有一条附合导线,由于存在观测误差,最后测得的一点(假设为C)坐标与该点已知坐标(xc,yc)不一致,其差值即为纵、横坐标增量闭合差,即(1)导线全长闭合差为f:(2)导线全长相对闭合差为:(3)此时若满足要求的精度,就可以直接根据坐标增量闭合差来计算各个导线点的坐标改正数,各导线点的坐标改正值计算公式为:(4)改正后各点坐标xi、yi为:(5)式中,∆x1、∆x2、∆x i、∆y1、∆y2、∆y i、分别为第一、第二和第i条边的近似坐标增量;x i’、y i’为各待定点坐标的观测值(即全站仪外业直接观测的导线点的坐标)。
采用坐标法进行导线近似平差,直接在已经测得导线点的坐标上进行改正,方法简单,易于掌握,避免了传统近似平差法的方位角的推算和改正,以及坐标增量的计算和改正,能大大提高工作效率,而且不易出错。
同时可以看出传统附和导线测量需要两条已知边,作为方位角的检核条件,而直接坐标法,只需要一条已知边和一个已知点即可,使导线的布网更加灵活。
导线的严密坐标平差采用全站仪观测导线的优势高等级平面控制测量对精度的要求较高,需要严密平差。
全站仪观测的导线采用严密坐标平差法较为适宜。
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
2022年量测继续教育习题量测专业考试试卷681.单项选择题(每题1分,共40分)(1)高程控制点的密度要求在每一个单项工程的部分至少有()个高程√234(2)组织测量工作应遵循的原则是:布局上从整体到局部,精度上由高级到低级,工作次序上()先规划后实施先细部再展开先碎部后控制√先控制后碎部(3)GPS单点定位,实质上是以卫星为已知点的()定位方法测角后方交会测角前方交会√测距后方交会测距前方交会(4)混凝土面板挠度监测,沿面板长度方向一般布置()条测线√1~3456(5)确定洞室掘进的方向称为给()水平线方向线腰线√中线(6)GPS测量过程中,可以()改变卫星高度角的限值将接收机关闭和重新启动查看接收卫星的数量√改变天线的高度(7)GPS网平差计算应当选择()所有基线√独立基线多余基线短基线(8)采用有浮托的引张线监测水平位移时,下列说法正确的是()对两端基点的稳定性没有要求√设法减小引张线的抗拉强度对两端基点的高差没有要求设法减小引张线的复位误差(9)目前最精确的GPS观测方法为()C/A码观测√P码观测L1载波观测L2载波观测(10)建立施工控制网时,通常将重要工程建筑物的()布设成控制点中心点√轮廓点轴线点细部点(11)利用全站仪测量边长,应考虑仪器()误差对所测边长的改正对中整平√i角加、乘常数(12)一个工程中,高程控制点一般不少于()个43√2(13)按用途划分,测量控制网分为()国家基本控制网和测图控制网√国家基本控制网和施工控制网(14)GPS测量要求卫星高度角大于()√10°15°20°25°国家基本控制网和变形监测网国家基本控制网和工程控制网(15)在水准测量中,水准仪架设在两标尺中间,可以消除或削弱的误差是()仪器升降误差标尺零点误差视差√i角误差(16)下列关于C/A码和P码叙述正确的是()P码目前只被调制在L1载波上,C/A码被分别调制在L1和L2载波上C/A码及P码被分别调制在L1和L2载波上√C/A码目前只被调制在L1载波上,P码被分别调制在L1和L2载波上C/A码及P码未被调整在L1和L2载波上(17)如果不把十字丝调焦到清晰状态,读数将受到()的影响√视准轴误差视差i角误差水平轴误差(18)GPS平面控制网采用2个及以上已知点坐标进行二维约束平差后,所获坐标是()1954年北京坐标系的坐标独立坐标系的坐标1980年国家大地坐标系的坐标√与已知点坐标系统一致的坐标(19)普通水准测量中,在水准尺上每个读数应精确到()位mdmcm√mm(20)监测仪器的初始值是指()√仪器安装后在既定荷载下,安装影响消除后的测值仪器在现场零荷载下的测值相对于荷载条件的计算起点的测值以上都不对(21)水准测量中,测段内安排成偶数站可以消除一对水准标尺()对高差的影响估读误差真长误差零点误差√零点差(22)下列各项测量工作中,()是初测和定测阶段都需做的导线测量中线测量线路水准点高程测量√地形测量(23)土体压力监测到的压力值为()总土压力孔隙水压力√有效应力以上都不对(24)洞室收敛变形监测可以采用的仪器有()渗压计√收敛计应力计(25)全站仪测量边长时应考虑仪器()的改正√加常数i角倾斜对中(26)工程外部变形监测中,离变形区较近但相对稳定的点被称为()标志点变形点√工作基点基准点(27)下列选项中,不是用于渗流监测的仪器设备是()渗压计测压管√测缝计量水堰(28)采用盘左盘右观测取均值的方法测量垂直角,可消除()的影响对中误差水平度盘刻划误差√垂直度盘指标差(29)平面控制网选择任意投影带进行平差,坐标属于()国家坐标系√独立坐标系工程坐标系施工坐标系(30)对于竖向开挖工程,高程传递可采用()方法√常规水准测量悬挂钢尺配合水准测量三角测量GPS测量(31)A、B两点的坐标分别为某A=100.00m,YA=150.00m;某B=150.00m,YB=200.00m。
导线闭合差规范篇一:导线测量规范导线测量规范(Ⅰ)导线测量的主要技术要求各等级导线测量的主要技术要求,应符合表3.3.1的规定。
注:1 表中n为测站数。
2 当测区测图的最大比例尺为1:1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2 当导线平均边长较短时,应控制导线边数不超过表3.3.1相应等级导线长度和平均边长算得的边数;当导线长度小于表3.3.1规定长度的1/3时,导线全长的绝对闭合差不应大于13㎝。
3.3.3 导线网中,结点与结点、结点与高级点之间的导线段长度不应大于表3.3.1中相应等级规定长度的0.7倍。
(Ⅲ)水平角观测3.3.7 水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定: 1 照准部旋转轴正确性指标:管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过1.5格。
2 光学经纬仪的测微器行差及隙动差指标:1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3 水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4 补偿器的补偿要求:在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5 垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6 仪器的基座在照准部施转时的位移指标:1秒级仪器不应超过0.3秒,2秒级仪器不应超过1秒,6秒级仪器不应超过1.5秒。
7 光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8 水平角观测宜采用方向观测法,并符合下列规定: 1 方向观测法的技术要求,不应超过表3.3.8的规定。
1注;1 全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2 当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
1、选点与标桩埋设对于新建和扩建的建筑区,导线应根据总平面图布设,改建区应沿已有道路布网。
点位应选在人行道旁或设计中的净空地带。
所选之点要便于使用、安全和能长期保存。
导线点选定后,应及时埋设标桩。
2、角度观测角度观测采用全园测回法进行。
各级导线网的测回数及测量限差与方格网角度观测要求相同。
3、边长丈量边长丈量的各项要求及限差,与方格网边长丈量要求相同。
4、导线网的起算数据在扩建、改建厂区,新测导线应符合在已有施工控制网上(将已有控制点作为起算点;若原有的施工控制网已被破坏,则应根据大地测量控制网或主要建筑物轴线确定起算点。
新建厂区的导线网起算点数据应根据大地测量控制点测定。
5导线网的平差导线网平差一级导线网采用严密平差法;二级导线网可以采用分别平差法。
关于导线网平差法的选定,必须全面考虑导线的形状、长度和精度要求等因素,导线网构成环形。
应采用环形平差。
符合在已知点上的导线网由于已知点较多可以采用结点平差法。
对于具有2~3个结点的导线网,而采用等权代替发只有一个结点的导线网,可以按照带权平均值的原理进行平差计算。
第二节导线测量一、导线测量概述导线——测区内相邻控制点连成直线而构成的连续折线(导线边)。
导线测量——在地面上按一定要求选定一系列的点依相邻次序连成折线,并测量各线段的边长和转折角,再根据起始数据确定各点平面位置的测量方法。
主要用于带状地区、隐蔽地区、城建区、地下工程、公路、铁路等控制点的测量。
导线的布设形式:附合导线、闭合导线、支导线,导线网。
附合导线网自由导线网钢尺量距各级导线的主要技术要求注:表中n为测站数,M为测图比例尺的分母表6J-1 图根电磁波测距附合导线的技术要求二、导线测量的外业工作1.踏勘选点及建立标志2.导线边长测量光电测距(测距仪、全站仪)、钢尺量距当导线跨越河流或其它障碍时,可采用作辅助点间接求距离法。
(α+β+γ)-180o改正内角,再计算FG边的边长:FG=bsinα/sinγ3.导线转折角测量一般采用经纬仪、全站仪用测回法测量,两个以上方向组成的角也可用方向法。
导线平差什么是导线平差导线平差是一种测量方法,用于测量和校正地面上的导线的位置和形状误差。
这些误差通常由各种因素引起,如地形变化、温度变化和测量仪器误差等。
导线平差可以帮助我们获得更准确的测量结果,并对地面上的导线进行校正。
导线平差的目的导线平差的主要目的是消除导线测量中的误差,使测量结果更加准确可靠。
通过导线平差,我们可以校正导线的曲线形状、长度和位置误差,以提高测量的准确性和可靠性。
导线平差的步骤导线平差通常包括以下几个步骤:1. 测量导线在进行导线平差之前,首先需要对导线进行测量。
测量导线可以使用各种测量仪器,如全站仪、经纬仪等。
在测量导线时,需要记录导线的起点和终点坐标,以及导线上的其他测量点坐标。
2. 创建导线平差网络在测量导线后,我们需要创建一个导线平差网络。
导线平差网络是由测量导线和测量点组成的网络。
通过导线平差网络,我们可以计算出导线的长度和位置误差。
3. 进行导线平差计算在创建导线平差网络之后,我们可以进行导线平差计算。
导线平差计算通常涉及各种数学和统计方法,如最小二乘法、误差传播法等。
通过导线平差计算,我们可以得到导线的校正结果。
4. 校正导线根据导线平差计算的结果,我们可以对导线进行校正。
校正导线包括校正导线的长度、形状和位置。
校正导线可以使用各种方法,如切割导线、唐氏法等。
导线平差的应用导线平差在土木工程、测绘工程、地质工程等领域广泛应用。
它可以帮助我们获得更准确的测量结果,并对导线进行校正。
导线平差还可以用于创建地形地图、计算土地面积和边界等。
导线平差的注意事项在进行导线平差时,需要注意以下几个事项:1.始终使用准确的测量仪器和工具。
测量仪器和工具的准确性会直接影响导线平差的结果。
2.在测量导线之前,需要确保导线表面干净和平整。
导线表面的污垢和不平整会影响测量结果。
3.注意温度变化对导线长度的影响。
温度变化会导致导线的伸缩,进而影响导线平差的结果。
4.在进行导线平差计算时,需要注意数学和统计方法的正确使用。
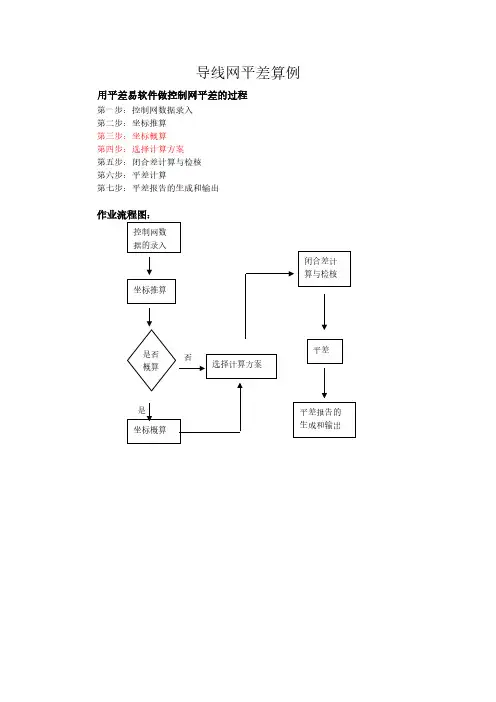
导线网平差算例用平差易软件做控制网平差的过程第一步:控制网数据录入第二步:坐标推算第三步:坐标概算第四步:选择计算方案第五步:闭合差计算与检核第六步:平差计算第七步:平差报告的生成和输出作业流程图:实例1 符合导线实例这是一条符合导线的测量数据和简图,A、B、C和D是已知坐标点,2、3和4是待测的控制点。
测站点角度(°′″) 距离(米)X (米) Y(米)B 8345.8709 5216.6021A 85.30211 1474.4440 7396.2520 5530.00902 254.32322 1424.71703 131.04333 1749.32204 272.20202 1950.4120C 244.18300 4817.6050 9341.4820D 4467.5243 8404.7624导线原始数据表导线图如下:导线图第一步:录入原始数据在平差易软件中输入以上数据,如下图“数据输入”所示:数据输入在测站信息区中输入A、B、C、D、2、3和4号测站点,其中A、B、C、D为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4点为待测点,其属性为00,其它信息为空。
如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。
根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式。
如下图“选择格式”所示:选择格式在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表B、D作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。
以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A的观测信息”所示:测站A的观测信息以C为测站点,以4号点为定向点时,照准D点的数据输入如下图“测站C的观测信息”所示:测站C的观测信息2号点作为测站点时,以A为定向点,照准3号点,如下图“测站2的观测信息”所示:测站2的观测信息以3号点为测站点,以2号点为定向点时,照准4号点的数据输入如下图“测站3的观测信息”所示:测站3的观测信息以4号点为测站点,以3号点为定向点时,照准C点的数据输入如下图“测站4的观测信息”所示:测站4的观测信息说明:①数据为空或前面已输入过时可以不输入(对向观测例外)②在电子表格中输入数据时,所有零值可以省略不输。
平面控制导线网图如图1。
图1平面控制导线网图——————————————潘龙文(1976-),男,湖北浠水人,高级工程师路桥梁专业),同济大学工程硕士,主要从事建设工程管理工作。
Value Engineering注:1、表中3.1表示第一种方法用CASIO fx-5800P 编程计算器,3.2表示第二种方法用一般科学计算器,3.3表示第三种方法用ESDPS 测量软件;2、3.2-3.1表示3.2方法与3.1方法计算结果之差,3.3-3.1表示3.3方法与3.1方法计算结果之差.表7三种平差方法计算结果对比分析表点号或项目 3.1 3.2 3.3 3.2-3.1 3.3-3.1N1N2N3N4N5N6N7W (s )fx (m )fy (m )fs (m )1/K [s](m )X (m )y (m )X (m )y (m )X (m )y (m )X (m )y (m )X (m )y (m )X (m )y (m )X (m )y (m )78164.64587212.10778447.88086874.46278514.37686800.80978637.86486801.83278742.02886969.74478621.86087191.51778527.65187327.718-26.00.0240.0140.027*********.65078164.64587212.10878447.88086874.46378514.37686800.81078637.86486801.83378742.02886969.74578621.86087191.51878527.65187327.719-26.00.0240.0150.028*********.65078164.64587212.10778447.88086874.46278514.37686800.80978637.86486801.83278742.02886969.74478621.86087191.51778527.65187327.718-26.00.0240.0140.027*********.65000.00100.00100.00100.00100.00100.00100.001000.0010.001-1930000000000000000000010纵坐标差:fx =53.748×cos (1°24′14″)+147.272×cos (336°27′3″)+65.808×cos (298°49′37″)+100.366×cos (308°30′2″)+252.237×cos (298°27′7″)+197.595×cos (238°11′14″)+123.491×cos (180°28′27″)+99.229×cos (132°4′32″)+440.710×cos (129°59′27″)+110.380×cos (40°3′9″)+69.192×cos (193°31′34″)+196.622×cos (36°59′12″)=0.024m 。
'******************************************************************************* ****' 本程序用于单一附(闭)合导线严密平差计算,采用按角度条件平差法。
以方向观测值中'误差的先验值作为单位权中误差。
计算结果可求得各待定点的坐标平差值及其点位精度Mx,My,'及M,并计算出各待定点误差椭圆元素E,F,Z''参考文献:郭久训.《控制网平差程序设计》北京:原子能出版社,2004.8''平差数据来源:潘正风等.《数字测图原理与方法》武汉大学出版社186页表6-5''等级:所用平差数据为首级图根导线数据(精度很不高)。
本程序中写出了方位角和导线全长相对闭合差的判'别,但考虑到程序的通用性,将这些限差判断当作了注释处理,而不实际运行。
''程序不足:没有导线网的图形表达。
'******************************************************************************* ****Private i%, j%, n%, tc#, tb#, B_x!, B_y!, e1!, e2!, m!, m0#, z#, aa As Boolean, bb As Boolean, cc As Boolean ',dd As BooleanPrivate Naa#(2, 2), Naa逆#(2, 2), W#(2), K#(2), qq#(2), fx#(2), fy#(2)Private A#(), Q#(), V#(), C#(), mx#(), my#(), mk#(), e#(), f#(), zz#()Private Po() As Point'文件格式说明:'文件格式详见文件"平差数据.txt"'Private Sub 打开文件_Click() '打开文件Dim ff$, temp$, A_name$, A_x!, A_y!, A_l#, A_s!, B_name$, B_l#, C_name$, C_x!, C_y!, D_name$, D_x!, D_y!Form1.Cls '清屏CommonDialog1.DialogTitle = "打开数据文件"CommonDialog1.FileName = ""CommonDialog1.ShowOpen'出错处理On Error GoTo FileErrff = CommonDialog1.FileName 'ff是文件路径名Open ff For Input As #1 '以顺序文件方式打开文件,使用inputLine Input #1, temp '读取文件中的说明语句Line Input #1, temp '读取文件中的说明语句Line Input #1, temp '读取文件中的说明语句Input #1, n '读取n,n为(测站数-1)ReDim Po(n) As Point '定义Po(n),其中Po(0)存A点数据,Po(n)存B点数据,Po(1)到Po(n-1)存n-1个未知点数据。
Line Input #1, temp '读取文件中的说明语句Line Input #1, temp '读取文件中的说明语句Input #1, m, e1, e2 '读取先验方向观测值中误差m,测距仪固定误差e1,比例误差e2Line Input #1, temp '读取文件中的说明语句Line Input #1, temp '读取文件中的说明语句Input #1, C_name, C_x, C_y '读取已知点CInput #1, A_name, A_x, A_y, A_l, A_s '读取已知点AFor i = 1 To n - 1 '读取n-1个未知点Input #1, Po(i).name, Po(i).l, Po(i).sNext iInput #1, B_name, B_x, B_y, B_l '读取已知点BInput #1, D_name, D_x, D_y '读取已知点DClose #1tc = ZBiaoFSuan(C_x, C_y, A_x, A_y) '坐标反算,求点C到A的坐标方位角,并记作tc,单位是度tb = ZBiaoFSuan(B_x, B_y, D_x, D_y) '坐标反算,求点B到D的坐标方位角,并记作tb,单位是度Po(0).name = A_name: Po(0).x = A_x: Po(0).y = A_y: Po(0).l = A_l: Po(0).s= A_s 'Po(0)存A点数据Po(n).name = B_name: Po(n).x = B_x: Po(n).y = B_y: Po(n).l = B_l 'Po(n)存B点数据For i = 0 To nPo(i).l = deg(Po(i).l) '将观测方向左角的单位度分秒化作度Next iReDim Q#(2 * n), A#(2, 2 * n), V#(2 * n), C#(1, 2 * n - 2), mx#(n - 1), my#(n- 1), _mk#(n - 1), e#(n - 1), f#(n - 1), zz#(n - 1) '变量重新定义bb = TrueMsgBox "文件已成功打开", , "提示"显示平差数据 ffExit SubFileErr:MsgBox "您的文件未打开或打开的文件格式有误!注意:请重新运行本程序!!", , "提示"End Sub'''Private Sub 开始计算_Click()If bb = True Then推算方位角和坐标 '求近似坐标求条件式'If dd = True Then '若平差数据没有超限,则进行下面的计算组法方程式求逆求K求改正数和平差值推算方位角和坐标 '求平差后坐标精度评定'Else'MsgBox "限差超限!", , "提示"'Exit Sub'End IfElseMsgBox "数据文件未打开!!", , "提示"Exit SubEnd Ifaa = TrueMsgBox "计算完毕!", , "提示"显示平差结果End Sub'''Private Sub 保存_Click()Dim ff$If aa = True ThenCommonDialog1.DialogTitle = "保存平差结果"CommonDialog1.Filter = "(*.txt)|*.txt"CommonDialog1.FileName = "平差结果.txt"CommonDialog1.ShowSaveff = CommonDialog1.FileNameIf ff = "" ThenMsgBox "文件名不能为空", , "警告"Exit SubEnd IfOpen ff For Output As #2 '以顺序文件方式保存文件,使用outputPrint #2, "平差结果:"Print #2, "---------------------------------------------------------------------------------------------"Print #2, " 单位权中误差 m0=" & Format(m0, "####.##") & " 秒"Print #2, "---------------------------------------------------------------------------------------------"Print #2, "点名", "x(m)", "y(m)", "点位误差(cm)", "E(cm)", "F(cm)", "Z(度分秒)"For i = 1 To n - 1Print #2, " " & Po(i).name, Format(Po(i).x, "########.####"), Format(Po(i).y, "########.####"), " " & Format(mk(i), "#####.##"), _" " & Format(e(i), "#####.##"), " " & Format(f(i), "#####.##"), " " & Format(zz(i), "###.#####")Next iPrint #2, "---------------------------------------------------------------------------------------------"Close #2cc = TrueMsgBox "保存完毕!", , "提示"ElseMsgBox "没有需要保存平差结果!", , "提示"Exit SubEnd IfEnd Sub'''Private Sub 退出_Click()If aa = True And cc = False Then提示.Show '若平差结果未保存则进行提示ElseEnd '若没有平差结果或平差结果已保存则退出End IfEnd Sub'''Private Sub 推算方位角和坐标()Po(0).t = tc + Po(0).l - 180If Po(0).t > 360 Then Po(0).t = Po(0).t - 360If Po(0).t < 0 Then Po(0).t = Po(0).t + 360For i = 1 To n'求方位角Po(i).t = Po(i - 1).t + Po(i).l - 180If Po(i).t > 360 Then Po(i).t = Po(i).t - 360If Po(i).t < 0 Then Po(i).t = Po(i).t + 360'求坐标Po(i).x = Po(i - 1).x + Po(i - 1).s * Cos(Po(i - 1).t / p0) 't要以度为单位Po(i).y = Po(i - 1).y + Po(i - 1).s * Sin(Po(i - 1).t / p0)Next iEnd Sub''角度改正数的单位是秒,边长改正数的单位是厘米'方向观测值中误差为单位权'方向观测值中误差的先验值为 m(秒)'角度观测值的权为 0.5'距离观测值中误差的先验值为 ms=e1+e2*s*0.0001(厘米)'Private Sub 求条件式()Dim sums!'求AFor i = 0 To n '求角度改正数系数A(0, n + i) = 1A(1, n + i) = (Po(i).y - Po(n).y) / 2062.65A(2, n + i) = (Po(n).x - Po(i).x) / 2062.65Q(n + i) = 2 '求角度观测值的权倒数Next iFor i = 0 To n - 1 '求边长改正数系数A(1, i) = Cos(Po(i).t / p0)A(2, i) = Sin(Po(i).t / p0)Q(i) = (e1 + e2 * Po(i).s * 0.0001) ^ 2 / m ^ 2 '求距离观测值的权倒数Next i'求WW(0) = (Po(n).t - tb) * 3600 '单位是sW(1) = (Po(n).x - B_x) * 100 '单位是cmW(2) = (Po(n).y - B_y) * 100 '单位是cmFor i = 0 To n - 1sums = sums + Po(i).sNext i'限差判断'这是首级图根导线的精度要求,其中 n+1 为测站数'If Abs(W(0)) > 40 * Sqr(n + 1) Or Sqr((W(1) / 100) ^ 2 + (W(2) / 100) ^ 2) / sums > 0.00025 Then '方位角闭合差和导线全长相对闭合差'Exit Sub'End If'dd = TrueEnd Sub'''Private Sub 组法方程式()Dim g%For i = 0 To 2For j = i To 2 '由于Naa是对称的,只求其上三角即可。