VEC经济型伺服控制器说明书
- 格式:pdf
- 大小:1.16 MB
- 文档页数:16
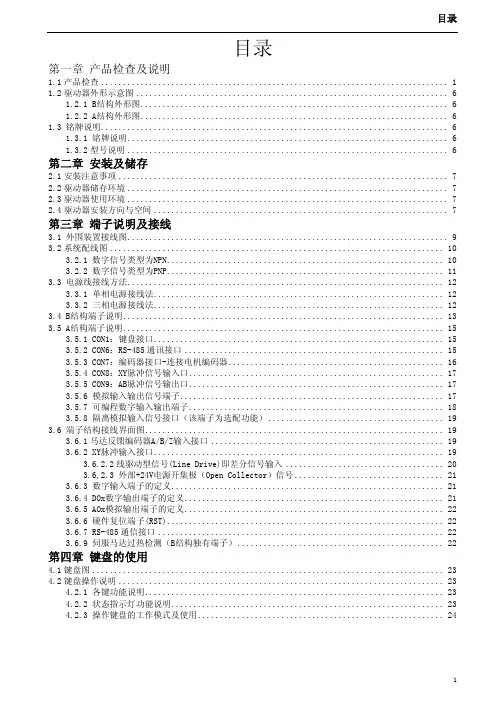
目录目录第一章产品检查及注意事项 (1)1.1开箱检查 (1)1.2运动控制器的型号说明 (1)1.3运动控制器的外形示意图 (2)1.4运动控制器储存环境 (2)1.5运动控制器使用环境 (2)1.6运动控制器的使用注意事项 (3)1.6.1安全注意事项 (3)1.6.2设计方面注意的事项 (3)1.6.3接线方面的注意事项 (3)1.6.4启动、维护时的注意事项 (4)1.6.5废弃时的注意事项 (4)1.7运动控制器的安装注意事项 (4)1.7.1运动控制器的安装方式 (4)1.7.2运动控制器的拆卸 (5)1.7.3运动控制器的摆放 (5)第二章产品介绍 (6)2.1术语与解释 (6)2.2威科达运动控制器简介 (6)2.3典型系统连接图 (7)2.4运动控制器接线端口说明 (7)第三章端子说明及配线 (10)3.1端子定义说明 (10)3.1.1数字IO跳线选择 (10)3.1.2数字量输入接线 (10)3.1.3数字量输出接线 (11)3.1.4RS-232(COM1)接口定义 (12)3.1.5RS-485接口定义 (12)目录3.1.6系统24V供电接口定义 (13)3.1.7数字IO供电接口定义 (13)3.1.8轴接口定义 (14)3.1.9模拟量输入定义 (16)3.1.10模拟量输出定义 (16)3.2运动控制器与伺服驱动器的连接 (17)3.2.1威科达伺服驱动器 (17)3.2.2台达伺服驱动器 (18)3.2.3三菱伺服驱动器 (19)3.2.4富士伺服驱动器 (20)3.2.5松下伺服驱动器 (21)3.2.6安川伺服驱动器 (22)第四章附录 (23)附录一:安装尺寸 (23)附录二:扩展模块概述 (26)第一章产品检查及注意事项第一章产品检查及注意事项1.1开箱检查感谢您选用威科达运动控制器!为了防止产品在购买与运输过程中的疏忽,请仔细检查下列项目:查看产品的铭牌是否与外包装一致;检查产品外观是否有划伤或者机械损伤;查看产品清单,核对配件是否齐全;轻摇机箱,查看内部是否有异物。
伺服压力机操作说明书
公司:珠海市浩星自动化有限公司
地址:南屏沙边路9号
电话:
操作步骤:
1、接通电源;
2、检查急停按钮是否被按下;
3、设定好参数(压力),设置方法请参考附件1
4、自动与手动控制模式选择,通过操作面板的选择开关
进行选择;
5、选择为“手动控制”模式时,用“手动上升”与“手
动下降”两个按钮分别控制设备的上、下运动,控制方式为点动控制;
6、选择为“自动控制”模式时,先观察“复位”指示灯
是否闪烁,如果闪烁说明没设备需要进行原点回归操作,此时应按下“复位按钮”进行原点回归;
如果指示灯没有闪烁,说明设备无需进行回原点,已做好自动运行的准备,此时按下双手启动按钮设备就会自动运行;
7、在自动运行中,按下停止按钮,设备停止;
8、在任何模式下,按下急停开关,设备停止,并切断伺
服电机电源;
附件1:。

交流伺服电机驱动器使用说明书1.特点●16位CPU+32位DSP三环(位置、速度、电流)全数字化控制●脉冲序列、速度、转矩多种指令及其组合控制●转速、转矩实时动态显示●完善的自诊断保护功能,免维护型产品●交流同步全封闭伺服电机适应各种恶劣环境●体积小、重量轻2.指标●输入电源三相200V -10%~+15% 50/60HZ●控制方法IGBT PWM(正弦波)●反馈增量式编码器(2500P/r)●控制输入伺服-ON 报警清除CW、CCW驱动、静止●指令输入输入电压±10V●控制电源DC12~24V 最大200mA●保护功能OU LU OS OL OH REG OC STCPU错误,DSP错误,系统错误●通讯RS232C●频率特性200Hz或更高(Jm=Jc时)●体积L250 ×W85 ×H205●重量 3.8Kg3.原理见米纳斯驱动器方框图(图1)和控制方框图(图2)4.接线4.1主回路卸下盖板坚固螺丝;取下端子盖板。
用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。
螺丝拧紧力矩大于1.2Nm M4或2.0 Nm M5时才可能损坏端子,接地线径为2.0mm2具体见接线图34.2 CN SIG 连接器[具体见接线图4●驱动器和电机之间的电缆长度最大20M●这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽;或让它们捆扎在一起●线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力●屏蔽驱动器侧的屏蔽应连接到CN.SIG 连接器的20脚,电机侧应连接到J 脚●若电缆长于10M,则编码器电源线+5V、0V应接双线4.3 CN I/F 连接●控制器等周边设备与驱动器之间距离最大为3M●这些线至少和主电路接线相隔30cm ,不要让这些线与电源进线走同一线槽或和它们捆扎在一起●COM+和COM-之间的控制电源(V DC)由用户供给●控制信号输出端子可以接受最大24V或50mA;不要施加超过此限位的电压和电流●若用控制信号直接使继电器动作要象左图所示那样,并联一只二极管到继电器。
VEC-VBR轮切专用伺服驱动器技术手册深圳市威科达科技有限公司SHENZHEN VECTOR SCIENCE AND TECHNOLOGY CO.LTD目录1.前言 (3)2.VEC-VBR简介 (4)3.特点 (5)4.基本系统架构 (6)5.VEC-VBR特殊应用参数介绍 (9)5.1M OD B U S(RTU)通信相关参数设定 (9)5.2特殊运转参数设定(执行自动R OTARY C UT功能必须的设定) (10)5.3与进料源、主速、编码器等相关参数设定 (11)5.4与轮切机台相关的特殊参数设定 (12)5.5R OTARY C UT运转中可改变的条件参数 (13)5.6VEC-VBR提供给系统观测用的参数群 (14)5.7特殊DI X数字输入功能 (15)5.8DI X的参数设定实例 (16)5.9特殊DO X数字输出功能 (17)5.10DO X的参数设定实例 (18)5.11特殊AO X模拟电压输出功能 (19)5.12补偿相关参数 (20)6.单一轮切分部系统试车步骤 (21)6.1VEC-VBR驱动器基本运转功能测试 (21)6.1.1确认事项 (21)6.1.2接线 (21)6.1.3驱动器重置(RESET) (22)6.1.4驱动器与伺服电机的自动调试 (22)6.1.5以速度控制模式试运转 (24)6.2轮切功能测试 (25)6.2.1设定各项控制参数 (25)6.2.2试车步骤 (26)7关于使用感应伺服电机时应注意事项 (27)7.1关于感应式电机激磁量的设定 (27)7.2关于感应式电机滑差量的设定 (27)8关于轮切系统扭力及功率的计算 (28)9关于裁切长度与生产速率的关系 (29)图表1VEC-VBR系统基本运行功能时序 (4)图表2系统应用的基本单线图 (6)图表3关于裁切长度与生产速率的关系 (29)表格1M OD B U S(RTU)通信相关参数设定 (9)表格2特殊运转参数设定 (10)表格3与进料源、主速、编码器等相关的参数设定 (11)表格4与轮切机台相关的特殊参数设定 (12)表格5R OTARY C UT运转中可改变的条件参数 (13)表格6VEC-VBR提供给系统观测用的参数群 (14)表格7特殊DI X数字输入功能 (15)表格8DI X的参数设定实例 (16)表格9特殊DO X数字输出功能 (17)表格10DO X的参数设定实例 (18)表格11特殊AO X模拟电压输出功能 (19)表格12补偿相关参数 (20)公式1加速补偿量 (20)公式2关于轮切系统扭力计算 (28)公式3关于轮切系统功率计算 (28)1.前言VB伺服驱动器使用说明书》资料进行的特VEC-VB本技术手册是针对《VEC-殊功能的增补。
KJS-VC 伺服控制卡使 用 说 明 书 北京康吉森自动化设备技术有限责任公司KJS-VC 使用说明书1.1 概述KJS-VC模块是专门为DEH系统设计的智能型伺服、功放卡,它接受控制器的控制指令经功放后直接驱动伺服阀,同时具有手操及故障诊断功能,并能够对输出进行偏置和增益调整。
1.2.1 指示灯PWR 电源指示灯。
CPU 闪烁为CPU工作正常;灭或恒亮为CPU工作不正常。
COM 有两种工作方式1、独立工作方式:亮表示输出回路断开或输出电流值不正确。
2、通讯工作方式:亮表示处于通信状态,此时断路检测有模块状态位通过通讯方式传输给控制系统。
LVDT1 当灯亮时,表明第一路LVDT故障。
LVDT2 当灯亮时,表明第二路LVDT故障。
1.2.2 开关量输入/输出方式DI 输入为干接点方式。
DO 输出方式选择可以选择1、有源输出 状态为+24V或0V2、无源输出 输出为继电器干结点1.2.3 手动功能VC卡上设计有手操功能,当备用手操盘上自动/手动钥匙开关打到手动时,按增减按钮及加速按钮可对调门进行直接操作,正常增减时速度为5%/min,加速增减时速度为35%/min。
手/自动跟踪问题VC 卡内已作了较周全的考虑。
当VC卡判断到与上位机(DPU站主机)通讯发生故障或两路LVDT均故障时,VC卡发出紧急手动请求指示,备用手操盘上“手动请求”指示灯点亮,然后根据情况可将自动/手动钥匙开关打到手动,对调门进行操作。
1.2.4开关量输出方式选择主板上跳线开关J11、J12决定了开关量输出方式a)干结点输出(无源输出)J11 J12的1、2短路,2、3开路b)+24输出(有源输出)J11 J1 2的2、3短路,1、2开路1.2.5 位移传感器零点满度调整电位器R101、R201分别对应两路LVDT的零点调整,改变R101、R201,则调整对应LVDT的零点。
电位器R102、R202分别对应两路LVDT的满度调整,改变R102、R202,则调整对应LVDT的满度。
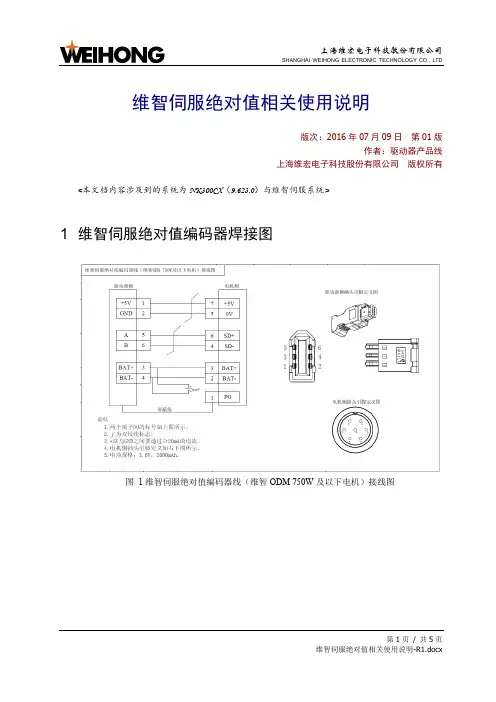
维智伺服绝对值相关使用说明版次:2016年07月09日第01版作者:驱动器产品线上海维宏电子科技股份有限公司版权所有<本文档内容涉及到的系统为NK300CX(9.623.0)与维智伺服系统>1 维智伺服绝对值编码器焊接图图1维智伺服绝对值编码器线(维智ODM 750W及以下电机)接线图图2维智伺服绝对值编码器线(维智ODM 1.0kW及以上电机)接线图1.1 加工要求:SC-06芯线接头处要加热缩套管包裹,如图1。
SC-06的屏蔽层接地处,将编织外翻后裹一层铜箔,再拧紧弹片螺丝,要保证接地可靠,使弹片与编织不存在松动的现象,如图2。
SC-06引出两根线接到LS14500电池上,要求导线穿过电池盒,引出的导线需要用热缩套管包裹在导线上,引入电池盒。
电池盒内部用扎带固定热缩套管,电池盒出口需要加塑料垫,防止电池盒滑动,如图3。
七芯直插XS16K7P的屏蔽线用套管包裹。
电池盒尺寸:6cm*3.5cm*2.5cm。
图 3 SC-06芯线接头加热缩套管图 4 屏蔽线通过弹片压到壳体图 5 电池盒接线2 绝对值功能绝对值功能在系统断电重启、报警清除等异常解除后,重新读取电机的实际位置,来纠正软件坐标与实际位置不一致的情况。
当参数“N11001 编码器类型”选择为“绝对值编码器”,仅需在第一次使用时,设定各轴的基准(与使用增量式编码器的回机械原点功能的作用相同)后,之后使用无需再设置基准(回机械原点)则可执行动作,且位置坐标均能正确对应。
2.1 启用绝对值2.1.1 功能设置NK300系统设置:“N11001 编码器类型”设置为1(绝对式编码器)。
——编码器类型:0:增量式编码器;1:绝对式编码器伺服系统设置:“Pr015 绝对式编码器设定”设置为0(作为绝对值编码器使用)——绝对式编码器设定:0:作为绝对值编码器使用;1:作为增量式编码器使用;注:一定要确定驱动器所带电机为绝对值电机。
2.1.2 异常情况处理驱动器报警Err40.0/Err42.0原因:1)编码器的供电电源、蓄电池电源停止,内置电容器电压低于规定值。
ECTOR 自动同步位置追随控制驱动器技术手册A u t o M a r k T r a k i n g 深圳市威科达科技有限公司VEC-VBT技术手册目录1.前言 (3)2.VEC-VBT简介 (4)2.1. 特点 (4)3.基本应用接线方式 (5)4.VEC-VBT特殊应用参数介绍 (8)4.1.MODBUS(RTU)通信相关参数设定 (8)4.2. 特殊运转参数设定 (9)4.3. 其它相关之参数设定 (10)4.4. 特殊DI X 数字输入功能 (11)4.5. 特殊DO数字输出功能 (11)5.单一分部系统试车步骤 (12)5.1. V EC驱控器基本运转功能测试 (12)5.1.1.确认事项 (12)5.1.2.接线 (12)5.1.3.驱控器重置(RESET) (13)5.1.4.驱控器与伺服电机的自动调适 (13)5.1.4.1.交流感应伺服电机的自动调适 (13)5.1.4.2.永磁式无刷伺服电机的自动调适 (14)5.1.4.3.以手动方式输入伺服电机运转控制参数 (15)5.1.5.以速度控制模式试运转 (15)5.1.6.试车步骤 (17)6.关于使用感应伺服电机时应注意事项 (18)6.1. 关于感应式电机激磁量的设定: (18)6.2. 关于感应式电机滑差量的设定: (18)7.应用范例 (19)7.1. 比例同步对位控制 (19)7.2. 应用在卡纸横切系统 (20)表格1M OD B US(RTU)通信相关参数设定 (8)表格2特殊运转参数设定 (9)表格3与其它相关之参数设定 (10)表格4特殊DI X 数字输入功能 (11)表格5特殊DO数字输入功能 (11)图表1系统应用之基本接线图 (5)图表2VEC-VBT标准应用案例 (19)图表3VEC-VBT在卡纸横切系统中的应用 (20)1. 前言本“VEC-VBT技术手册”是针对“VEC-伺服驱动器使用说明书”之资料进行特殊功能之增补。
工业缝纫机伺服控制器用户手册前言注意: 使用前请详细阅读本用户手册及所搭配的缝制设备说明书,配合正确使用,并须由接受过专业培训的人员来安装或操作。
本产品仅适用于指定范围的缝制设备,请勿移做其他用途。
本公司拥有对此用户手册的最终解释权。
使用中若存有任何疑问或对我们的产品及服务有任何意见或建议,请随时与我们联系。
安全说明1)安装和调试前,请仔细认真地阅读本手册。
2)本手册中标有符号之处为安全注意点,必须特别注意并严格遵守,以免造成不必要的损害。
3)本产品须由受过专业培训的人员来安装或操作。
4)确保电源安全接地并符合产品铭牌上标示的电压范围及技术要求。
第 1 页共 8 页第 2 页 共 8 页5) 接通电源开关时,请把脚离开脚踏板。
6)在进行以下操作时,必须先断开系统电源:■ 安装机器时;■ 在控制箱上插拔任何连接插头时; ■ 穿针线,换机针及翻抬机头时; ■ 机器休息不用及修理或调整时。
7) 拧紧所有紧固件,以防止缝制作业时产生振动或停针位置错位等异 常现象。
8) 每次关闭控制系统后再次启动,应相隔30秒以上。
9) 设置系统控制参数或进行保养修理工作应由受过相关培训的专业人 员来完成。
10) 维修所用的所有零部件,必须由本公司提供或认可,方能使用。
11) 接地线的安装(特别注意)。
注意:安装控制器时必须正确接地,否则将导致控制器无法正常工作,更严重的可能会被电击(详见安装章节)。
1. 产品介绍 1.1 概述此系列工业缝纫机数控交流伺服系统,电机与控制器分体吊装,使配置组合灵活方便,电机与控制器可按需搭配,实现多种缝纫机对功率、速度等的配套要求;安装简易、调整便捷、力矩大、体积小、噪音低、效率高(省电!);采用开关电源供电,使其具有更宽的电压适配范围;电磁铁侧面接插,使连接更可靠,避免油渍污染引起的控制器故障;优化交流伺服电机控制策略,使转速控制精度高,停针速度快;专利设计的吊装方式使安装更简捷,整体震动降至最低,系统运行更平稳;具有电磁铁回路短路保护功能,防止错误接线损坏控制器。
深圳市威科达科技有限公司VC516系列伺服驱动器使用说明书VC516智能吊专型伺服功能说明书目录第1章智能吊相关参数 (1)第2章智能吊输入功能位 (6)第3章智能吊输出功能位 (7)第4章报警处理 (8)第5章智能吊功能说明 (10)5.1机械参数 (10)5.2模式切换 (10)5.3模式操作 (11)5.3.1长时间待机模式 (11)5.3.2临时待机模式 (11)5.3.3手柄模式 (11)5.3.4负载(悬浮)模式 (12)5.3.5拷机模式 (12)5.3.6保压模式 (14)5.4点动 (15)5.5限位 (15)5.6急停 (17)5.7灯效说明 (17)5.8重要参数监视 (17)第6章智能吊试运行 (19)6.1手柄模式试运行 (19)6.1.1手柄模式试运行参数配置 (19)6.1.2试运行步骤 (21)6.1.3手柄模式试运行波形分析 (22)6.2负载(悬浮)模式试运行 (23)6.2.1负载(悬浮)模式试运行参数配置 (23)6.2.2试运行步骤说明 (25)6.2.3负载(悬浮)模式试运行波形分析 (26)6.3拷机模式试运行 (27)6.3.1拷机模式试运行参数配置 (28)6.3.2试运行步骤说明 (31)6.3.3拷机模式试运行波形分析 (31)6.4保压模式试运行 (32)6.4.1保压模式试运行参数配置 (33)6.4.2试运行步骤说明 (36)6.4.3保压模式试运行波形分析 (36)第7章配线 (37)7.1主电路接线 (37)7.2输入输出线 (38)7.4通信接线 (40)7.3位置指令脉冲信号接线 (41)7.5智能吊经典接线图 (45)第8章Modbus通信协议 (46)第9章增益调整 (48)第10章异常处理 (49)版本更新记录 (49)第1章智能吊相关参数有效P15.17手柄最大力度,单位:0.001kN0.001-32.7670.3RW 立即有效P15.18负载重量传感器量程,单位:0.001kN0.001-2147483.6475.000RW立即有效P15.20负载重量反馈来源0-内部放大;1-AI1;2-AI2;0-22RW立即有效P15.21负载最大速度,单位:0.001mm/s0.001-2147483.64720.000RW立即有效P15.23负载速度加减速时间,单位:ms0-65535500RW 立即有效P15.24负载速度与AI的函数关系0-线性;1-指数;0-10RW立即有效P15.25负载操作最小力度,单位:0.001kN0.001-2147483.6470.020RW立即有效P15.27负载操作最大力度,单位:0.001kN0.001-2147483.6470.060RW立即有效P15.29负载操作硬着陆力度,单位:0.001kN0.001-2147483.6470.060RW立即有效P15.31负载信号反馈滤波时间,单位:ms0-32767300RW 立即有效P15.32负载信号变化时间,单位:ms0-65535100RW 立即有效P15.33上点动位置,单位:0.1mm0-6553.550.0RW 立即有效P15.34上点动速度,单位:0.1mm/s0.1-6553.5100.0RW 立即有效P15.35上点动加减速时间,单位:ms0-65535500RW 立即有效P15.36下点动位置,单位:0.1mm0-6553.550.0RW 立即有效P15.37下点动速度,单位:0.1mm/s0.1-6553.5100.0RW 立即有效P15.38下点动加减速时间,单位:ms0-65535500RW 立即有效P15.39限位减速前置量,单位0.001mm0.001-65.53510.000RW 立即有效P15.40压力探测最大位移,单位:0.001mm0.001-2147483.64750.000RW立即有效P15.42压力探测速度,单位:0.001mm/s0.001- 5.000RW立即2147483.647有效P15.44压力加速时间,单位:ms0-65535500RW 立即有效P15.45压力减速时间,单位:ms0-65535500RW 立即有效P15.46压力初始值,单位:0.001KN0.001-2147483.6470.200RW立即有效P15.48压力初始值时间,单位:ms0-655350RW 立即有效P15.49压力目标值,单位:0.001KN0.001-2147483.6471.000RW立即有效P15.51压力目标值到达范围,单位:0.001KN0.000-32.7670.010RW 立即有效P15.52压力目标值时间,单位:ms0-65535100RW 立即有效P15.53压力保持范围,单位:0.001KN0.000-32.7670.000RW 立即有效P15.54压力增益调整模式0-压力调整;1-自动调整0-10RW立即有效P15.55压力-比例P增益0-32767100RW 立即有效P15.56压力-积分I增益0-3276710RW 立即有效P15.57压力-微分D增益0-327670RW 立即有效P15.58压力最大补偿速度,单位:0.001mm/s0.001-2147483.6475.000RW立即有效P15.60压力补偿下限值,单位:0.001mm0.001-2147483.647-10.000RW立即有效P15.62压力补偿上限值,单位:0.001mm0.001-2147483.64710.000RW立即有效P15.64压力显示滤波时间,单位:ms0-6553510RW 立即有效P15.65负载过重电流百分比,单位:0.1%,反馈电流百分比P09.31大于此值且保持1s,则报警0.1-3276.7100RW立即有效P15.66用户上限位提前输出位移,单位:mm0-327670RW 立即有效P15.67用户下限位提前输出位移,单位:mm0-327670RW 立即有效P15.68用户上限位延时输出时间,单位:ms0-655350RW 立即有效P15.69用户下限位延时输出时间,单位:ms0-655350RW有效P15.71功能标志位。
艾威图伺服调机步骤简易说明书目录一、检查确定伺服驱动器及电机是否为所需型号,注意安装环境。
(1)二、配线 (1)三、电机型号代码匹配 (3)四、接线框图 (4)五、基本功能参数 (6)六、伺服报警代码、报警原因及处理方法一览表 (11)七、电子齿轮比设定步骤 (13)本调机步骤简易说明书主要就配线及调试做一简易说明,因客户使用情况各异,此说明书只做一个调试流程的大概说明,具体细节部分请依实际要求调整。
一、检查确定伺服驱动器及电机是否为所需型号,注意安装环境。
二、配线周边装置接线ID300A型结构接线ID300B型结构接线安装注意事项1、检查R\S\T与L1\L2的电源和接线是否正确;2、检查伺服电机输出U\V\W端子相序接线是否正确;3、使用外部回生电阻时需将B2、B3开路,外部回生电阻应接于B1、B2端,若使用内部回生电阻时,则需将B2、B3短路且B1、B2端开路;4、异警,紧急停止时,利用ALM输出将电磁接触器(MC)断电,以切断电机电源。
三、电机型号代码匹配*根据选购驱动型号,如适配非驱动标配电机,需对PA-1参数进行调整,对应调整参数见表1驱动器型号连续输出电流最大输出电流标配电机型号可适配电机型号ID3001R8S** 1.8 5.4M6201EN2LE**-ID3002R8S** 2.88.4M6401EN2LE**-ID3004R5S** 4.512M8751EN2LE**M8701CN2LE**M9751EN2LE**M9102DN2LE**MA601EN2LE**MB102DN2LE**ID3005R7S** 5.718MB152DN2LE**MA122CN2LE**MA152EN2LE**MA122EN2LE**MB132DN2LE**MB152BN2LE**ID3008R0S**818MB202DN2LE**MA182EN2LE**ID300010S**1018MB232BN2LE**MB252DN2LE**ID300015S**1530MB382DN2LE**MD302BN2LE**表1以恢复MB152DN2LE**(电机型号代码为46)电机默认参数为例,具体操作如下:四、接线框图1、使用外部电源,控制信号端子接线框图如下:外部提供24V 电源——控制信号接线图注意:☞采用单端驱动方式,会使动作频率降低。
ECTOR 自动同步位置追随控制驱动器技术手册A u t o M a r k T r a k i n g 深圳市威科达科技有限公司VEC-VBT技术手册目录1.前言 (3)2.VEC-VBT简介 (4)2.1. 特点 (4)3.基本应用接线方式 (5)4.VEC-VBT特殊应用参数介绍 (8)4.1.MODBUS(RTU)通信相关参数设定 (8)4.2. 特殊运转参数设定 (9)4.3. 其它相关之参数设定 (10)4.4. 特殊DI X 数字输入功能 (11)4.5. 特殊DO数字输出功能 (11)5.单一分部系统试车步骤 (12)5.1. V EC驱控器基本运转功能测试 (12)5.1.1.确认事项 (12)5.1.2.接线 (12)5.1.3.驱控器重置(RESET) (13)5.1.4.驱控器与伺服电机的自动调适 (13)5.1.4.1.交流感应伺服电机的自动调适 (13)5.1.4.2.永磁式无刷伺服电机的自动调适 (14)5.1.4.3.以手动方式输入伺服电机运转控制参数 (15)5.1.5.以速度控制模式试运转 (15)5.1.6.试车步骤 (17)6.关于使用感应伺服电机时应注意事项 (18)6.1. 关于感应式电机激磁量的设定: (18)6.2. 关于感应式电机滑差量的设定: (18)7.应用范例 (19)7.1. 比例同步对位控制 (19)7.2. 应用在卡纸横切系统 (20)表格1M OD B US(RTU)通信相关参数设定 (8)表格2特殊运转参数设定 (9)表格3与其它相关之参数设定 (10)表格4特殊DI X 数字输入功能 (11)表格5特殊DO数字输入功能 (11)图表1系统应用之基本接线图 (5)图表2VEC-VBT标准应用案例 (19)图表3VEC-VBT在卡纸横切系统中的应用 (20)1. 前言本“VEC-VBT技术手册”是针对“VEC-伺服驱动器使用说明书”之资料进行特殊功能之增补。